

1. 서 론
최근 해양 산업에서는 환경 규제 강화와 연료 효율 향상 요구에 따라 고효율・저진동 추진 시스템에 대한 관심이 높아지고 있다. 이러한 요구에 대응하기 위한 다양한 추진 방식 중, 상반회전 추진기(Counter-Rotating Propeller, CRP) 시스템은 선행 프로펠러 후류의 회전 운동 에너지를 후행 프로펠러가 회수함으로써 전체 추진 효율을 향상시키고, 선체에 작용하는 토크 불균형을 저감할 수 있는 장점으로 주목받고 있다(Inukai, 2011). 특히 대형 선박 및 함정과 같이 고출력 추진이 필요한 경우, 내축과 외축이 동심 구조로 배치되어 서로 반대 방향으로 회전하는 이중축계는 기계적 일체성을 유지하면서 상반회전 추진기의 구현을 가능하게 하는 유력한 설계 방식으로 제안되고 있다(Han et al., 2022).
그러나 이러한 이중축계는 내・외축 간의 회전 동역학적 상호작용으로 인해 단일 축계에서 나타나지 않는 복잡한 진동 특성을 보인다. 특히 전진 및 후진 와류 모드(Forward/Backward Whirl), 자이로스코픽 효과, 베어링의 교차강성(Cross-coupled Stiffness) 등이 동시에 작용하여 시스템의 공진 특성 및 안정성에 큰 영향을 미친다. 또한, 한국선급(KR) 및 국제선급협회(IACS) 등에서 제시하는 규정은 베어링 간격, 축 직경, 허용 진동 한도 등에 대한 명확한 설계 기준을 요구하고 있어, 이러한 복합 동특성을 정밀하게 반영할 수 있는 고정도 시뮬레이션 해석 기법의 필요성이 대두되고 있다(DNV, 2024; KR, 2024).
이중축계의 동적 해석은 내・외축을 독립된 회전체로 간주하고, 스프링–댐퍼 모델을 이용하여 축간 상호작용을 근사적으로 고려하는 방식이다. 자이로스코픽 효과(Gyroscopic Effect)와 축간 커플링(Coupling Stiffness)이 주요 진동 모드에 미치는 효과가 보고되면서, 두 축의 회전속도 차이에 따른 모드 분리(Mode Splitting) 및 불안정 영역(Unstable Region)의 발생이 체계적으로 규명되기 시작하였다(Friswell, 2010). 또한 유한요소법을 기반으로 축간 베어링, 유체 필름 베어링, 기어 요소 등의 비선형 거동을 포함하는 정밀한 시뮬레이션이 가능해졌다(Ao, 2023).
본 연구에서는 상반회전 추진 이중축계의 회전 동특성을 정밀하게 분석하기 위한 수치해석 기반 시뮬레이션 방법론을 제안하였다. 제안된 해석 기법은 축 및 베어링 요소의 유한요소모델을 구축하고, 자이로스코픽 커플링, 베어링의 강성 및 감쇠 행렬을 고려하여 시스템의 임계속도, 캠벨선도(Campbell Diagram), 불평형 응답(Unbalance Response) 등을 도출할 수 있도록 구성하였다. 이를 통해 베어링의 위치, 강성비, 축간 커플링 특성 등 주요 설계 인자가 시스템 안정성에 미치는 영향을 분석하였다.
2. 축계 진동 해석 방법
축계 진동 해석은 회전체 동역학에 기반하여 축계 구성요소들을 단순화하고 탄성변형을 가정하여 유한요소법으로 정식화하여 수행하였다. 본 장에서는 유한요소 정식화 과정을 간단하게 소개한다. 먼저 축계 전체 시스템에 대한 라그랑지안, 은 다음 식 (1)과 같이 구성할 수 있다.
여기서, disk는 한 질점요소로서 질량과 축방향 관성모멘트, 직경방향의 관성모멘트를 가지고 있어 운동에너지, 는 다음 식 (2)와 같이 구성된다.
반면 shaft 요소는 Timoshenko beam 이론에 기반하여 운동에너지, 와 변형에 의한 위치에너지 를 다음 식 (3)과 같이 구성하였다.
bearing은 질량 요소가 없이 위치에너지만을 가지도록 모델링하였다(식 (4)).
베어링은 위치에너지 뿐만 아니라 마찰에 의해 전체 시스템의 에너지를 dissipation하는 역할을 가지므로 소실되는 에너지량을 아래와 같이 구성하였다.
앞서 소개한 축계를 구성하는 요소들을 이용해 Modified Lagrange equation을 구성해주면 베어링에 의한 에너지 손실을 고려한 운동방정식을 정식화할 수 있다(식 (5)).
여기서 는 generalized coordinate를 의미하며 각 질점의 자유도는 축 방향의 수직한 x, y 축의 변위 , 그리고 x, y축 방향의 회전각 , 으로 구성된다.
Disk 요소에 대해 먼저 살펴보면 식 (2)의 각속도, 𝛺를 Euler angle로 표현하면 다음 식 (6)과 같다.
Disk 요소에 대한 운동에너지 식 (2)를 (5)에 대입하면 운동방정식의 inertia를 얻을 수 있다(식 (7)).
다음으로는 bearing 요소에 대해서 살펴보면 베어링은 두 가지 종류가 있는데 첫 번째는 위치가 변하지 않는 고정 질점과 연결된 bearing으로서 이 경우에 탄성 위치에너지와 damping에 의한 소실 에너지는 다음 식 (8)과 같이 표현된다.
식 (8)을 (5)에 대입하면 다음과 같은 운동방정식의 stiffness matrix와 damping matrix를 얻을 수 있다(식 (9)).
또 다른 베어링의 종류는 축의 질점과 다른 축의 질점을 연결하여 서로를 지지해주는 bearing이다. 이 경우에는 탄성 위치에너지와 damping에 의한 소실 에너지를 다음 식 (10)과 같이 표현할 수 있다.
Shaft element도 식 (3a)과 (3b)를 이용하여 유도할 수 있는데 유도과정이 길기 때문에 생략하기로 한다(Friswell, 2010). 특히 본 연구에서는 shaft 요소의 단면이 일정하지 않은 케이스를 모두 고려하여 beam 요소를 구현하였다(Genta and Antonio, 1988; Whalley and Abdul-Ameer, 2009).
Modified Lagrange equation, 식 (5)을 모든 요소에 정리하면 다음 식 (11)과 같은 운동방정식을 얻는다.
여기서, 는 중력에 의한 하중을 의미하며, 는 편심에 의한 외력 등을 의미한다. 만약 stiffness가 선형이라면, 즉 beam의 탄성 변형만을 고려한다면 위 식의 해를 homogeneous solution과 외력에 대한 해인 particular solution으로 나누어 생각할 수 있다(식 (12)).
여기서, 은 외력이 없는 homogeneous solution, 는 중력에 의한 static deflection을 의미하며, 는 편심 unbalance force에 의한 변위를 의미하며 각각의 해는 다음 방정식 (13)의 해를 의미한다.
여기서, 를 계산하기 위해 식 (13a)을 정리하면 다음 식 (14)와 같다.
위의 식은 와 같은 형태로 쓸 수 있고, 여기서 는 vibration response이므로 와 같은 형태로 가정하면 아래 식 (15)와 같은 고유값 문제로 귀결된다.
3. 해석 시뮬레이션 검증
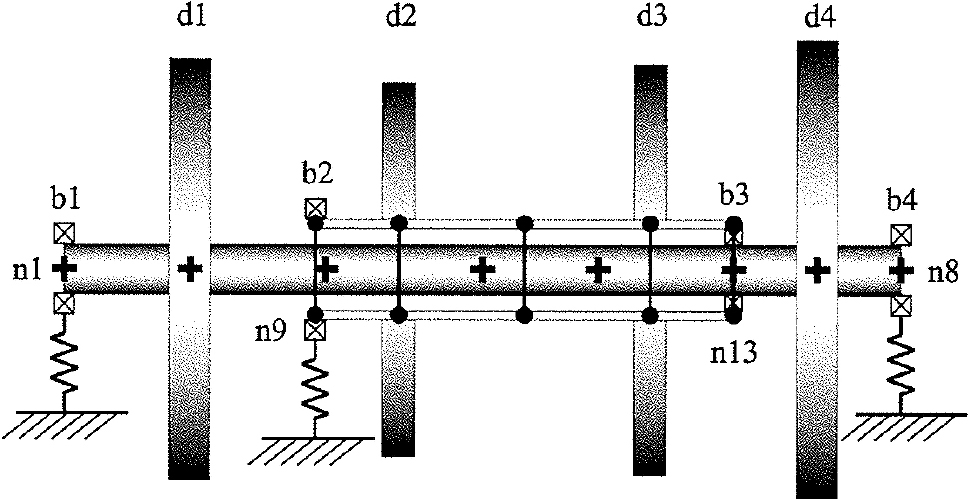
해석 결과를 검증하기 위하여 잘 알려진 Co-axial Rotor 모델(Ao, 2023; Friswell, 2010)을 모델링(Fig. 1)하고 In-house code로 수행한 축 진동 시뮬레이션 해석 결과를 비교하였다. 해당 모델은 외축과 내축을 가진 Dual Rotor로 구성되어 있고, 4개의 Disk와 Ground와 연결된 3개의 bearing, 그리고 외축과 내축을 같이 지지해주는 bearing 1개로 구성된 단순한 Co-axial Rotor 모델이다. 외축은 내축에 비하여 1.5배 빠르게 회전하며, 질량을 포함한 모델의 성질 값과 구조에 관련된 정보들은 문헌을 참고하였다(Friswell, 2010).
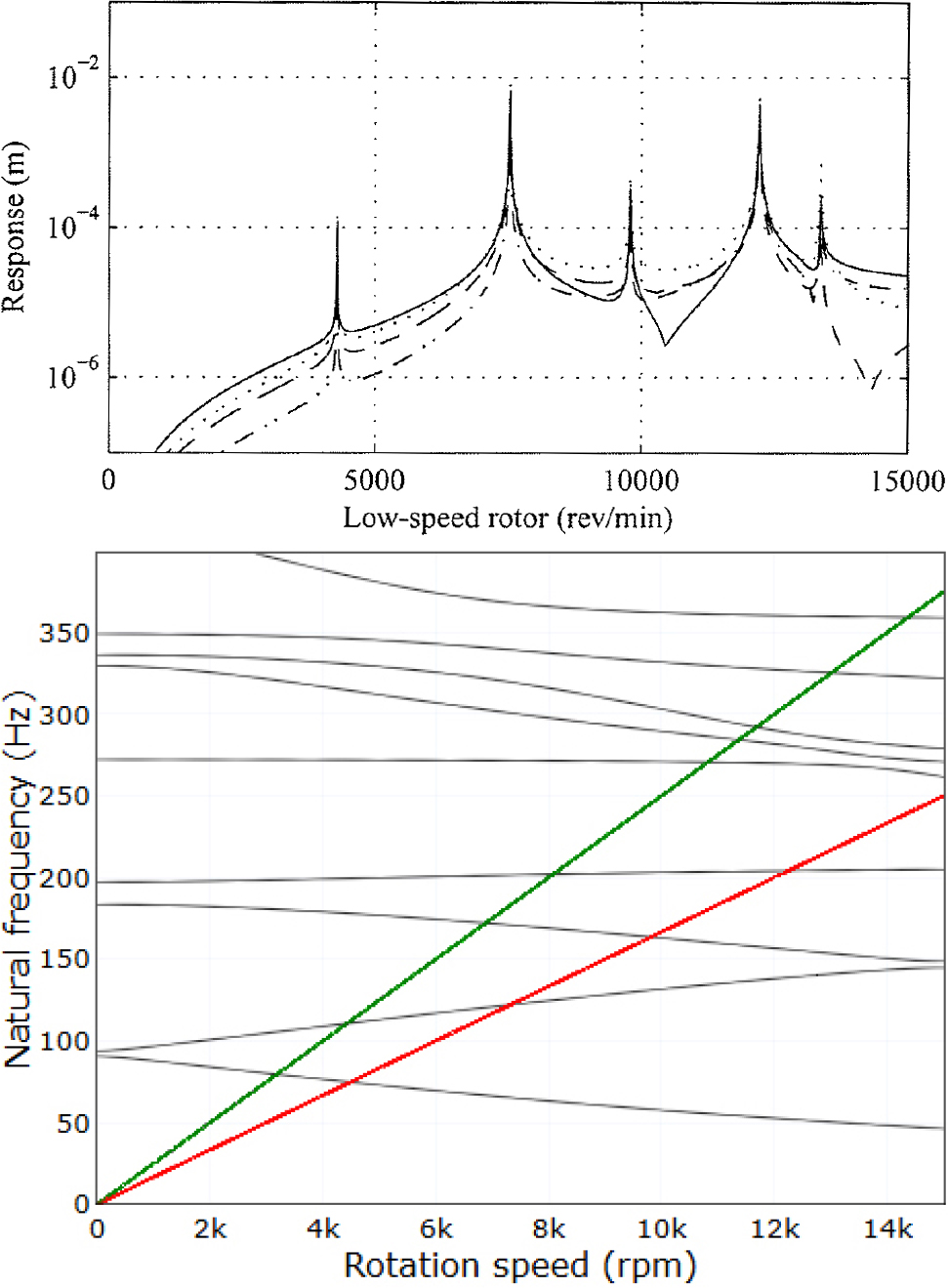
캠벨 선도를 비교한 Fig. 2를 보면, 참고문헌 결과와 비교하여 본 과제에서 개발한 해석 시뮬레이션 결과가 충분히 일치하는 것을 확인할 수 있다. 특히 본 과제를 포함해서 축계 진동성능에 가장 중요한 Low Frequency 영역에서는 Natural frequency가 거의 동일함을 확인하였다. 다만 high natural frequency는 조금은 경향성이 다른 모습을 보이는데 이러한 현상은 문헌에서의 shaft element가 Euler-Bernoulli Beam theory에 기반하고 Shear effect를 따로 구현한 반면 본 연구에서는 Shear effect를 고려한 Timoshenko beam theory에 기반하였기 때문에 강성행렬과 질량행렬이 다르고, 축의 stress가 높아지는 high frequency 영역에서 더 큰 차이가 발생하는 것으로 분석된다.
4. CRP 모델 해석 결과
상반회전 이중축계 초기 모델은 Fig. 3과 같이 모델링하였다. 내축은 직경이 0.175m인 내부가 꽉 찬 축이며, 선미에는 Aft. 프로펠러가 장착되어 있고 선수에는 모터가 장착되어 있다. 외축은 중공축이며 내직경이 0.202m, 외직경이 0.225m이다. 마찬가지로 외축의 선미에는 Forward 프로펠러가 장착되어 있고 선수에는 모터가 있는 구조이다. 내축은 외축과 연결된 베어링으로 지지되며 같은 위치에 외축이 선박을 통해 지지되는 베어링이 배치되어 있다. 프로펠러는 Aft. 프로펠러와 Forward 프로펠러 모두 질량을 800kg으로 추정하였다. 이들은 같은 회전수로 반대방향으로 회전한다. CRP 구조의 설계 변수들에 대한 자세한 내용은 Table 1에 정리하였다.
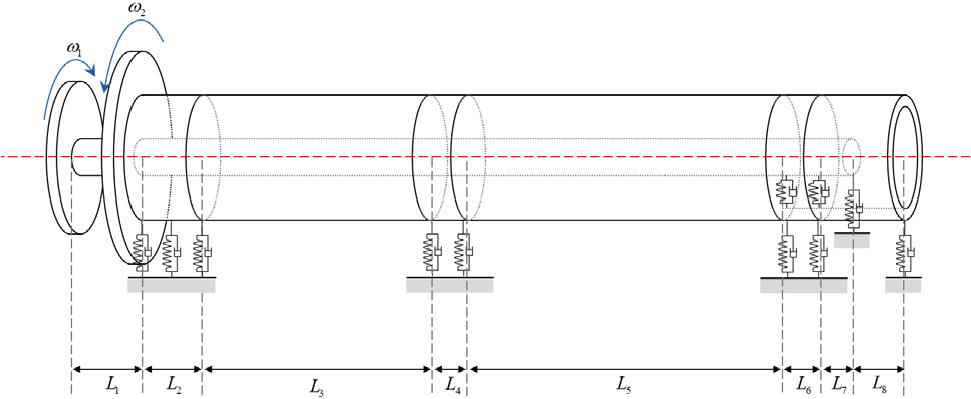
Table 1.
The parameters of CRP model
축계의 변위는 고유값 문제로 얻어지는 동차해, 프로펠러 편심 효과(unbalance force)에 의한 변위 그리고 하중에 의한 쳐짐의 중첩으로 얻어진다. 먼저 고유값 문제로 얻어지는 동차해를 계산해 보면 자이로스코픽 효과에 의해서 축의 회전수에 따라 시스템의 고유진동수가 달라지는데 이를 캠벨 선도로 분석하면 Fig. 4와 같다.
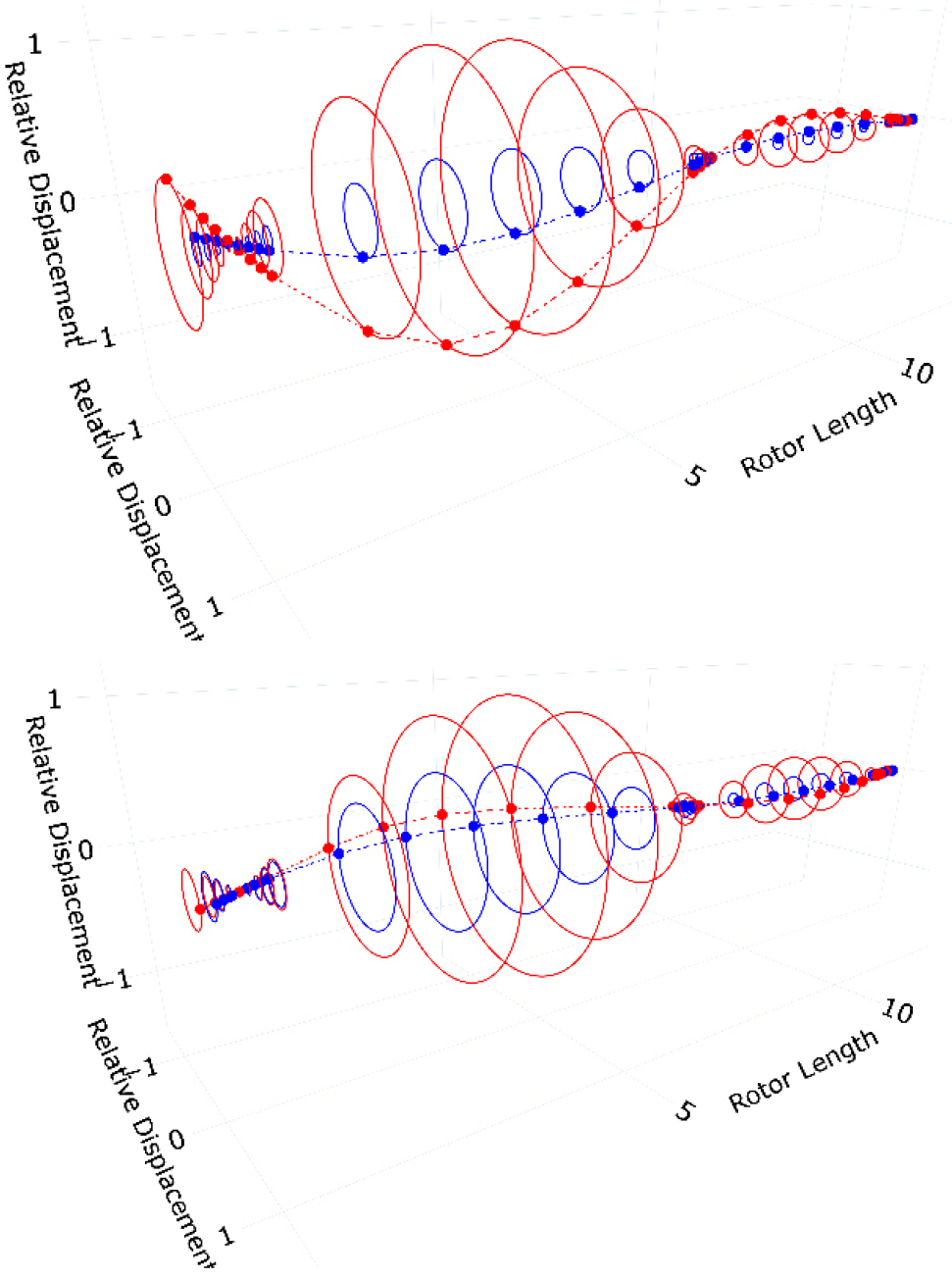
Fig. 4에서 검은 선은 CRP 이중축계의 고유진동수를 의미하는데 자이로스코픽 효과에 의해 로터의 회전 속도에 따라 고유진동수가 달라지게 된다. 또한 빨간 선은 회전수x1 선을 의미하며 초록선은 x2를 의미한다. 빨간선과 검은 선이 만나는 곳이 실제 로터가 회전할 때 이중축계가 마주하는 공진모드이므로 이때의 공진 모드를 회피하기 위한 전략이 필요하다. 회전 속도가 500rpm까지 가능하다고 할 때 약 410rpm에서 첫번째 공진 형상모드에 걸리게 되고, 약 470rpm을 지날 때 두번째 공진에 걸리는 모습을 확인할 수 있다. 이는 축계의 안정성 측면에서 많은 위험을 수반한다. 먼저 해당 공진 형상모드들의 진동 형상을 관찰해 보면 Fig. 5와 같다.
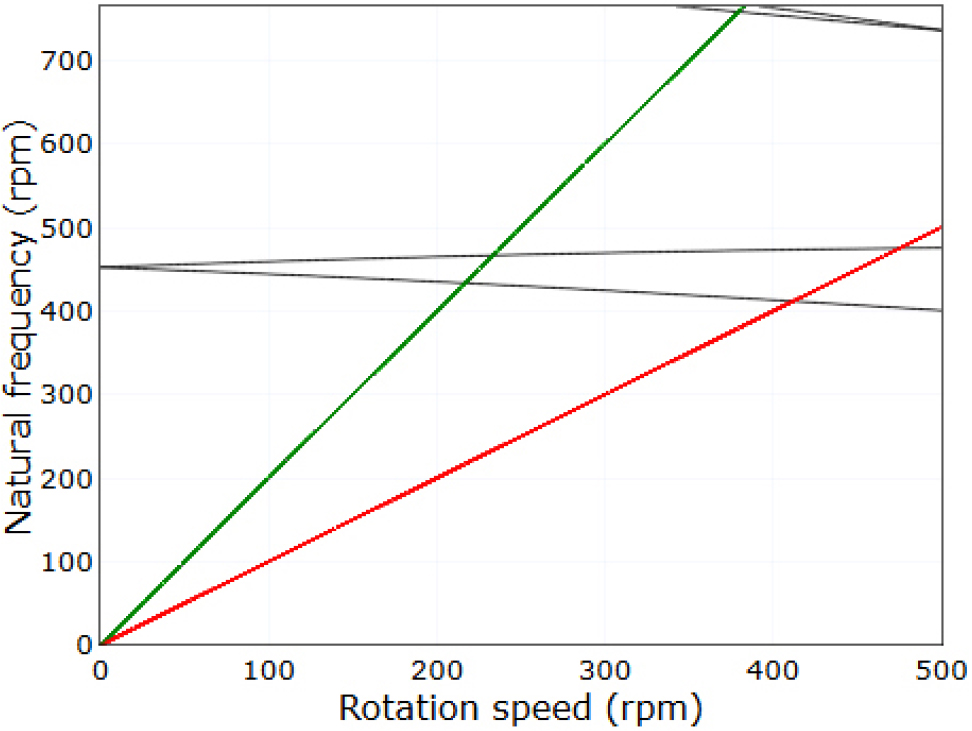
Fig. 5에서는 캠벨선도(campbell diagram)에서 500rpm까지 마주칠 수 있는 공진모드 2가지를 보여주고 있다. 빨간 선은 내축의 공진 변위를, 파란 선은 외축의 공진 변위를 나타낸다. 형상 모드를 살펴보면 1st mode와 2nd mode 모두 내축과 외축이 같은 방향으로 위상을 같이 한다는 특징이 있어 반대 위상을 가질때보다는 덜 위험한 것으로 보인다. 만약에 내축과 외축이 반대위상을 가진다면 공진시 외축과 내축이 서로 충돌할 위험이 훨씬 높아진다. 변위의 크기를 비교해 보면 1st mode의 경우 최대 변위를 가지는 위치에서 내축이 외축에 비해 훨씬 높은 변위를 가지게 되는데, 이는 축간의 충돌에 위험요소로 작용한다. 반면에 2nd mode의 경우 최대 변위를 가지는 위치에서 변위의 차이가 상대적으로 적은 것으로 확인된다. 또한 베어링에서의 변위 차이도 1st mode에서 더 큰 것으로 확인되어 두 공진 모드 중에서 1st mode가 축계 안정성 측면에서 더 위험한 공진모드로 판단할 수 있다.
1st mode를 마주치지 않도록 설계하기 위해서는 여러 설계 인자들의 영향성을 고려해 보아야 한다. 본 연구에서는 베어링의 강성, 축의 지름, 그리고 베어링의 위치를 설계 인자로 보고 각각의 설계 인자가 상반회전 이중축계의 고유진동수에 미치는 영향성을 분석하고자 한다.
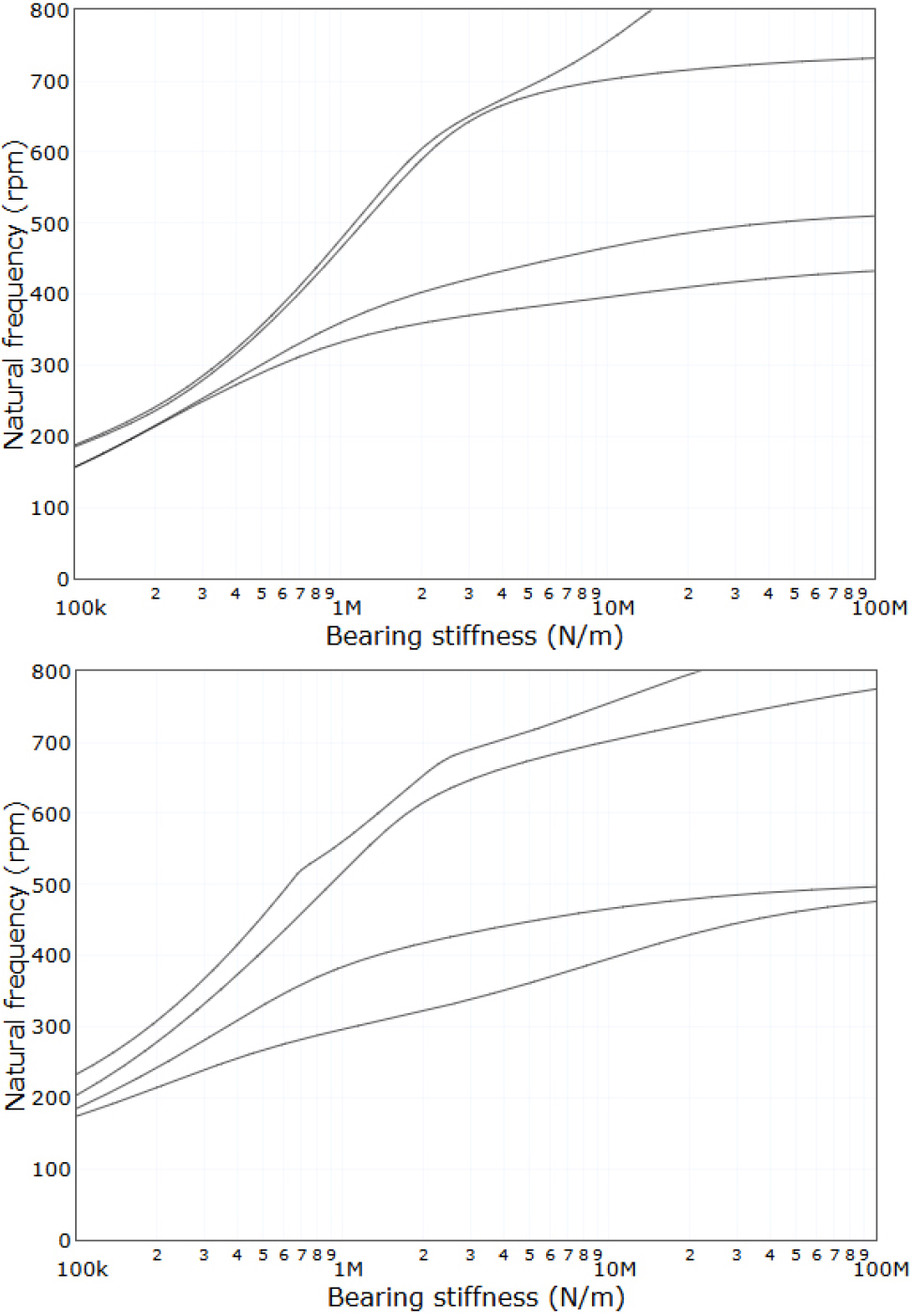
먼저 축계 베어링 강성의 영향성을 분석하기 위해서 선체와 연결되어 외축을 지지하는 베어링과 외축에 연결되어 내축을 지지하는 베어링의 영향성을 나누어 비교하고자 한다.
Fig. 6에서는 베어링 강성 변화에 따른 축계 고유진동수를 비교하고 있다. 상단 그림은 외축과 선체가 연결되는 베어링의 강성만 변화시켰을 때의 결과를 비교한 것이고, 하단 그림은 내축과 외축이 연결되는 베어링의 강성만을 비교한 것이다. 이때 변화하지 않는 베어링은 로 고정하였다. 결과적으로는 베어링의 강성은 높으면 높을수록 각 형상모드의 고유진동수값이 높아지는 것을 확인할 수 있다. 특히 내축-외축을 연결하는 베어링의 강성을 높일 때 그 효과가 좋은 것을 확인할 수 있고, 대략 수준까지 강성이 높아지면 축계의 회전수가 500rpm이 될 때까지는 모든 공진 모드를 마주하지 않게 된다. 특히 외축과 내축을 연결해주는 베어링의 강성을 높여주는 것이 첫번째 공진모드를 피하는데 더 많은 영향을 준다는 것을 알 수 있다.
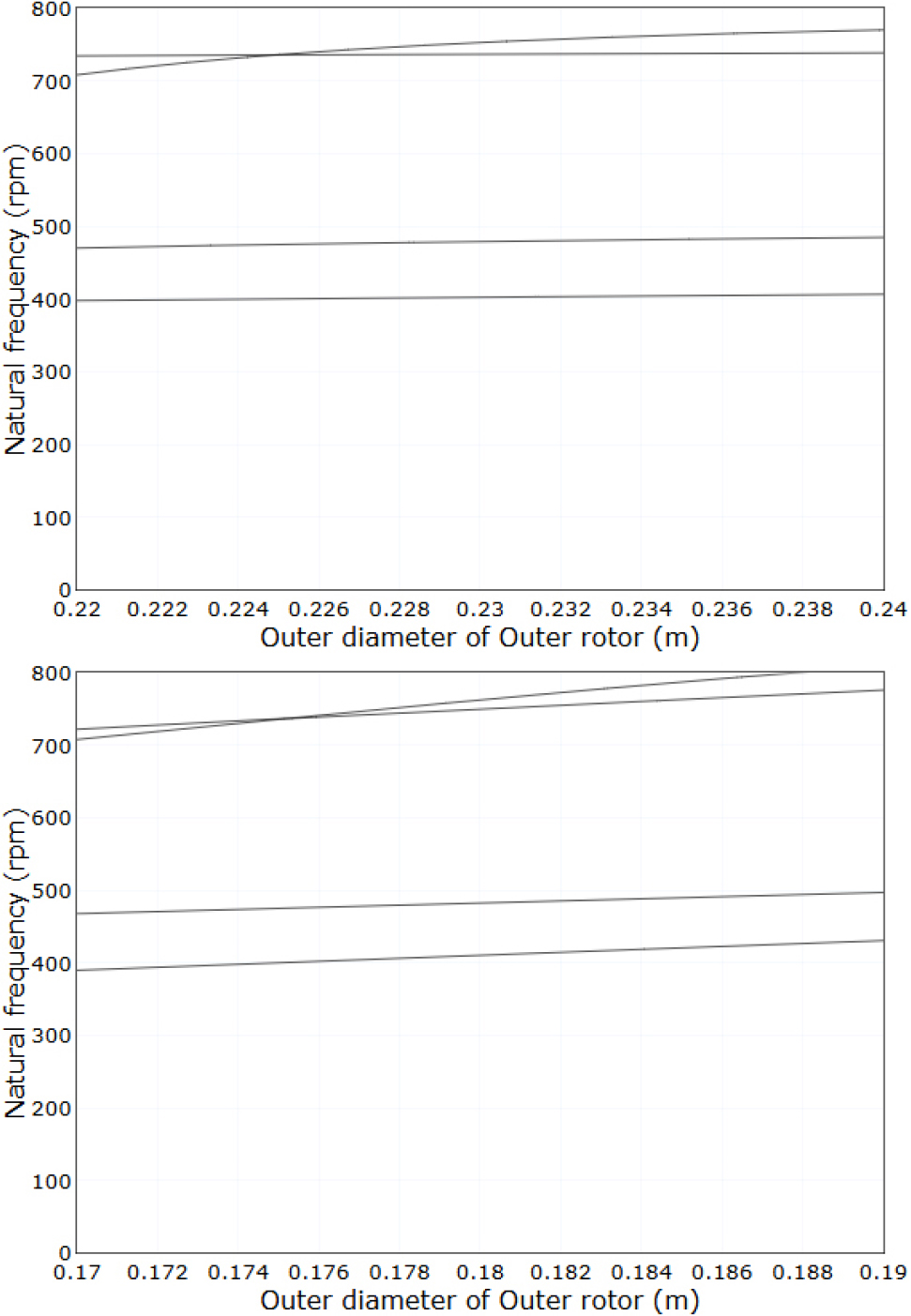
축계의 직경은 선급의 선박건조규정에 언급되어 있기는 하지만 본 선박은 이중축계라는 특수한 모델이라는 점과 선박규정에서도 축계의 직경을 하나의 값으로 고정하지는 않은 점 등을 고려하여 직경의 변화에 따라서 고유진동수가 어떻게 변화하는지를 살펴보았다. 규정을 참고하여 Fig. 7의 상단 그림은 외축의 외직경만 변화시켰을 때 고유진동수를 비교하였고, Fig. 7 하단 그림은 내축의 직경을 변화시키고, 이에 따라 외축의 직경도 같이 변화시키는 경우이다. 이때 내축의 외직경과 외축의 내직경의 차이는 0.027m, 외축의 내직경과 외축의 외직경의 차이는 0.023m로 고정시킨 채 변화시켰다. 결과적으로는 축의 직경이 증가함에 따라서 고유진동수는 증가하는 경향성을 보이므로 내축의 직경을 크게 증가시키면 공진모드를 마추하지 않게 되는 것을 확인할 수 있으나 그 민감도는 매우 적은 것으로 확인된다.
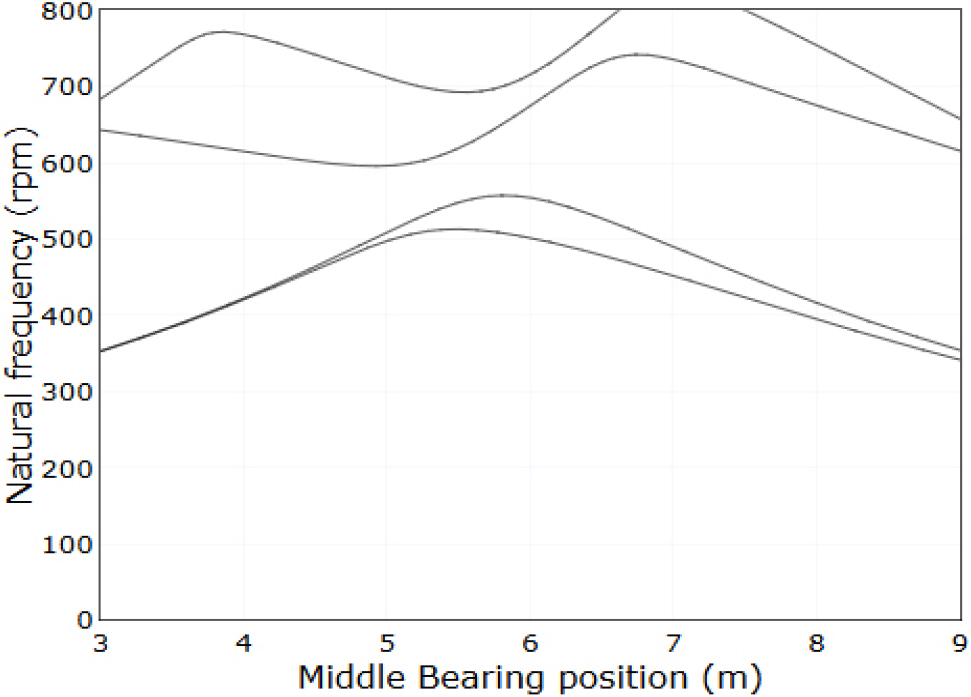
마지막으로 Fig. 8은 베어링의 위치에 따른 고유진동수의 변화를 나타낸다. 베어링의 강성과 축직경의 영향성 평가를 통해서 축직경은 내축의 직경을 0.175m, 외축의 내직경과 외직경을 각각 0.202m, 0.225m에서 변경하지 않았고, 베어링은 선체와 외축을 연결하는 베어링 강성을 , 내축과 외축을 연결해주는 베어링의 강성만 로 증가시켰다. Fig. 8은 내축과 외축의 회전수가 각각 500rpm, -500rpm으로 회전할 때의 고유주기를 나타낸다. 그림에서 확인할 수 있듯 베어링의 위치가 약 5.5m위치, 즉 Fig. 3에서 가 5.5m, 가 6.5m일 때 첫 번째 공진모드(Fig. 5의 첫 번째 그림)을 피할 수 있다.
앞선 영향성 분석을 통해서 CRP 이중축계의 회전시 공진모드를 피할 수 있는 설계 변수를 찾을 수 있었다면, 해당 설계로 프로펠러의 편심효과에 의한 영향이 어떤지 확인해 보고자 한다. 프로펠러의 질량 중심이 축계의 가운데에서 떨어져 있다면 축이 회전할 때 프로펠러가 축의 회전속도와 위상이 같은 외력을 축에 전달하게 되는 형태가 되어 축의 변위가 발생한다. 가장 민감하게 관찰해야 할 곳은 프로펠러와 가장 가까운 베어링이 될 것이며, 이 베어링 위치에서도 프로펠러와 가장 가까운 곳(Fig. 9의 위그림) 과 먼 곳(Fig. 9의 아래그림)의 외축과 내축의 편심에 의한 변위를 비교해 보았다. 빨간선은 내축, 파란선은 외축의 변위를 뜻한다.
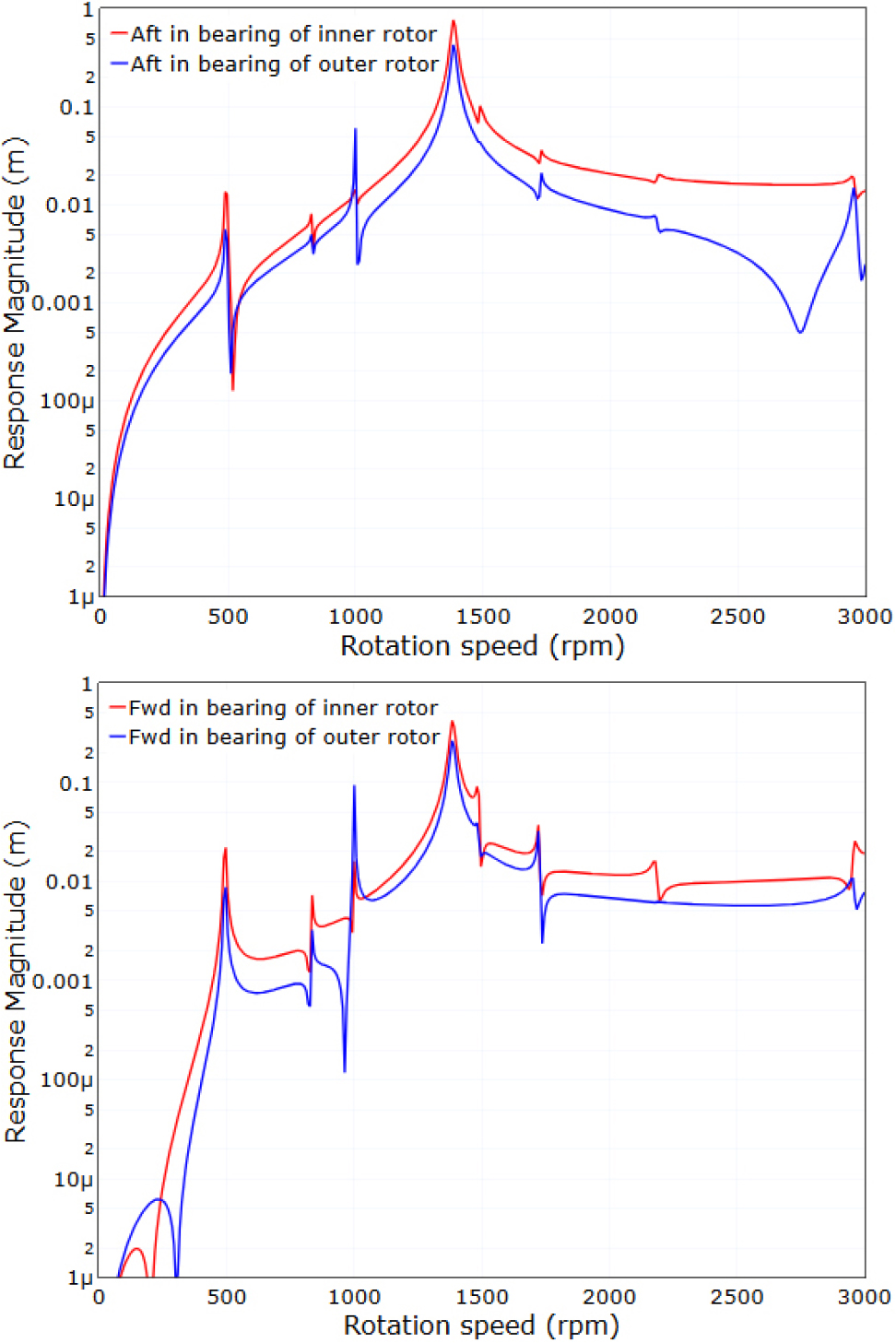
편심의 크기는 프로펠러마다 모두 다르지만 그 크기에 따라 위의 결과를 scaling해서 해석할 수 있기 때문에 본 논문에서는 편심을 약 0.01m라고 가정하여 계산하였다. 결과적으로는 CRP 축계의 회전수 약 500rpm를 최대 회전수로 가정할 때 편심에 의해서 높은 변위가 발생하는 구간은 약 500rpm 부근이라고 계산되지만 매우 높은 위험을 가지는 위치는 아니라고 판단된다.
5. 결 론
본 연구에서는 상반회전 추진 프로펠러 이중축계(Counter-Rotating Propeller Shaft System)의 회전 동특성을 정밀하게 해석하기 위한 수치해석 기법을 제안하고, 자체 개발한 해석 코드(In-house code)를 이용하여 유효성을 검증하였다. 동역학 회전체의 해석 방법론은 Timoshenko beam theory를 기반으로 축과 베어링 요소를 유한요소화하고, 자이로스코픽 효과 및 베어링 감쇠를 포함하여 시스템의 운동방정식을 정식화하였다. 검증 모델에 대한 Campbell 선도 비교 결과, 기존 문헌의 해석 결과와 본 연구의 시뮬레이션 결과가 높은 일치를 보였으며, 이를 통해 해석 기법의 신뢰성을 확인하였다.
CRP 축계의 실제 해석 결과에서는 회전속도 약 410rpm과 470rpm 부근에서 주요 공진모드가 발생함을 확인하였으며, 특히 1차 모드에서 내축의 변위가 외축보다 크게 나타나 축간 충돌 가능성이 높은 것으로 분석되었다. 베어링 강성에 대한 민감도 분석에서는 내축–외축 베어링의 강성이 증가할수록 고유진동수가 상승하여 공진영역을 회피할 수 있음을 확인하였고, 축 직경 변화의 영향은 상대적으로 작으나 안정성 향상에는 긍정적으로 작용하였다. 또한 프로펠러 편심에 따른 불평형 응답 분석을 통해 최대 회전수(500rpm) 부근에서 변위가 급증함을 확인하였으며, 공진 및 편심 효과가 중첩되는 구간에서 축계의 불안정성이 커질 수 있음을 규명하였다.
따라서 본 연구에서 제안한 해석 방법은 상반회전 추진 이중축계의 설계 단계에서 베어링 강성 선정, 축 직경 설계, 불평형 제어 전략 등을 검토하기 위한 효과적인 수치적 도구로 활용될 수 있다. 향후 연구에서는 유체–구조 연성효과와 비선형 베어링 특성을 포함한 해석으로 확장하여 실제 운전 조건에서의 안정성 평가 및 설계 최적화를 수행할 예정이다.
