

1. 서 론
기어는 기계시스템의 동력을 전달하는 핵심 요소로써 다양한 산업 분야에 널리 사용되고 있다. 기어는 한 쌍 이상의 치면이 접촉하여 회전하면서 동력을 전달하며, 정확한 감속비와 높은 기계적 효율을 보인다. 그러나 기어의 이가 서로 맞물리고 떨어짐에 따라 치물림 강성은 주기적으로 변화하고, 이러한 강성의 변화는 기어의 진동 및 소음을 유발하는 주요 원인이다.
치물림 강성의 변화에 따른 응력을 계산하기 위해서 일반적으로 ISO 6336(2019), AGMA 2101(2004) 등의 규격을 참조하거나 유한요소해석 등을 수행해야 한다. 이 중 유한요소해석은 기어의 치면과 이뿌리에 가해지는 응력과 변형량뿐만 아니라 기어 전 영역의 응력을 계산할 수 있으며 기어의 복잡한 형상을 모두 고려할 수 있다는 장점이 있다. 이 때문에 많은 연구자들은 유한요소해석을 통해 기어의 치물림 해석을 수행하였다.
Lee 등(2002)은 스퍼 기어의 유한요소해석 결과와 루이스 식 계산결과를 비교・분석하였다. Lee 등(2010)은 스퍼 기어의 유한요소해석 결과와 AGMA 규격을 통해 계산된 접촉응력을 비교・분석하였다. Hwang 등(2011) 역시 스퍼 기어와 헬리컬 기어의 접촉응력을 계산할 때 유한요소해석 결과가 AGMA 계산식보다 높게 나타남을 보였다. Lee 등(2012)은 헬리컬 기어의 요소망의 크기를 조절하여 치면 접촉응력의 수렴성을 보인 뒤 ISO 6336 규격을 이용한 계산 결과와 비교・검증하였다. Kim 등(2010)은 코니칼 인벌류트 기어의 유한요소해석을 통해 크라우닝 적용이 접촉응력에 미치는 영향을 분석하였다. Czako 등(2020)은 헬리컬 기어의 유한요소해석을 통해 기어의 치면 수정, 전달 토크 등의 설계 인자가 전달 오차에 미치는 영향을 분석하였다. Bartosova 등(2018)은 토크, 기어 치의 개수, 중심거리, 치면 수정에 따른 스퍼기어의 유한요소해석을 수행하고 전달 오차 결과를 비교・분석하였다.
기어의 유한요소해석은 일반적으로 계산량이 많아 상당한 시간과 자원이 요구되므로, 해석 조건을 간소화하기 위한 여러 방법이 사용된다. 예를 들어 비선형 해석이 요구되는 치면 접촉 마찰력이 해석 결과에 미치는 영향이 미미하다고 가정하고 무마찰 조건을 설정한다거나, 정해석(static analysis)시에 접촉이 발생하지 않는 기어의 이를 제거하여 요소의 개수를 줄이는 방법 등이 있다. 그러나 기존의 기어 유한요소해석에 사용된 모델링 방법은 연구자마다 제각기 다르고, 해석의 간소화를 위해 사용된 방법들이 해석 결과에 얼마나 영향을 미치는 지에 대해 연구한 논문은 찾아보기 힘들다.
이에 본 연구에서는 마찰, 모델 간소화, 요소망 형상 등 기어의 다양한 유한요소해석 조건에 따라 해석 결과가 어떻게 달라지는지 그 영향을 분석해 보고자 한다.
2. 본 론
2.1 기어 제원
본 연구에 사용된 기어는 Fig. 1과 같다. 기어는 인벌류트 스퍼 기어이며 탄성계수 210 GPa, 푸아송비 0.3의 강철로 모델링하였다. 구동 기어와 피동 기어의 상세 제원은 Table 1과 같다. 기어 치면 수정(tooth flank modification)은 고려하지 않았다.
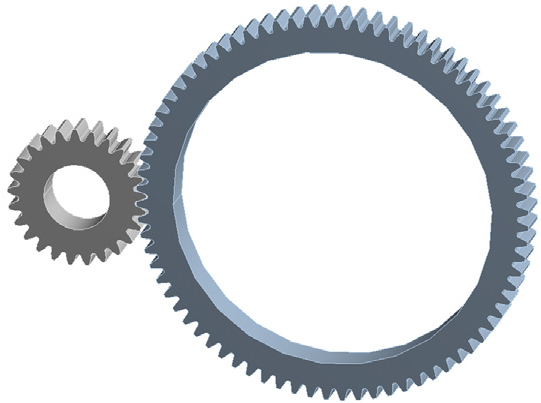
Table 1
Specification of the spur gear pair
| Description | Driving gear | Driven gear |
| Number of teeth | 25 | 76 |
| Module | 6 mm | |
| Pressure angle | 20° | |
| Pitch circle diameter | 150mm | 456mm |
| Face width | 44mm | |
| Addendum | 6mm | |
| Dedendum | 7.5mm | |
2.2 유한요소해석 방법
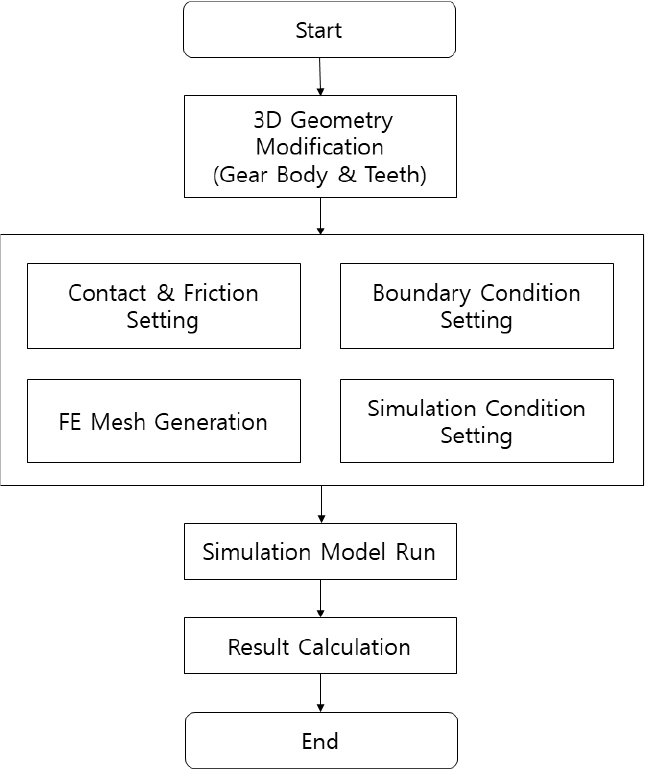
기어의 유한요소해석을 위해 상용 프로그램인 ANSYS Workbench를 사용하였다. 기어의 유한요소해석은 정해석으로 수행되었으며 1주기의 기어 치물림 사이클을 일정 간격으로 등분하여 해석을 수행하고, 각 물림 위치에서의 해석 결과를 종합하여 기어 성능을 분석하였다. 일반적으로 기어의 유한요소해석 과정은 Fig. 2의 순서를 따른다.
요소망은 20절점을 갖는 육면체 요소인 SOLID186으로 모델링하였으며, 기어 치면의 접촉 알고리즘은 Augmented Lagrange method를 사용하였다. Augmented Lagrange method는 Penalty method와 Pure Lagrange method의 단점을 보완한 접촉 알고리즘으로, 접촉 강성의 크기에 민감하지 않아 접촉면의 penetration이 과도해지는 문제점이 없으며 수렴성이 좋아 기어 접촉 알고리즘으로 널리 사용된다(Ansys Inc., 2004).
조인트는 기어 웹의 안쪽 면에 생성하여 중심점에 있는 단일 노드로 묶은 뒤 이 중심노드에 경계 조건을 인가하였다. 기어 회전방향을 제외한 모든 방향으로의 조인트 자유도는 구속하였다. 경계조건으로 구동 기어 조인트가 시간에 따라 반시계 방향으로 정해진 각도만큼 회전하도록 하고, 피동 기어 조인트에 반시계 방향의 반력 모멘트 4,940Nm를 인가하였다.
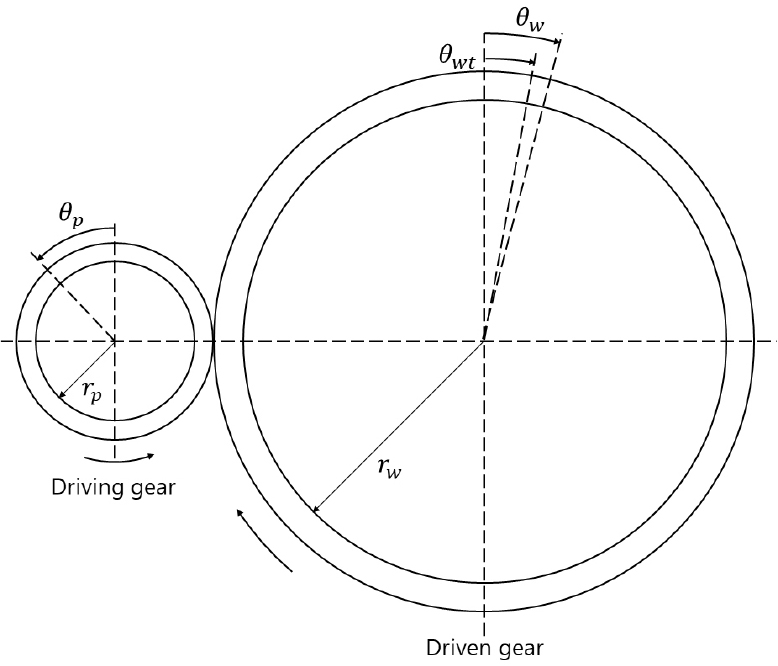
기어의 정해석은 기어 치물림 주기를 등분한 뒤 각각의 치물림 위치에서 피동 기어에 모멘트를 인가하여 발생하는 변형 각도를 계산하는 과정으로 이루어진다. 기어의 변형 각도는 정적 전달오차를 계산하는 기어의 성능 해석 지표로 활용하였다. 전달오차는 구동기어가 일정 각도만큼 회전했을 때 피동기어의 이론적 회전 각도와 실제 회전 각도의 차이를 의미한다. 일반적으로 전달오차가 클수록 기어의 진동이 커져 소음이 발생하고 고장이 발생하기 쉬우므로 기어 성능 지표로 전달 오차의 크기를 사용할 수 있다. 정적 전달오차는 식 (1)과 같이 피동 기어의 변형 각도에 피치원 반경을 곱한 값으로 정의하였다. 스퍼기어의 전달 오차는 힘을 전달하는 치면 접촉쌍의 개수에 따라 변화하며, 접촉쌍의 개수가 많을수록 전달오차는 작아지는 경향이 있다.
여기서, 는 피동기어의 피치원 반경, 는 피동기어의 회전각도, 𝜂는 기어비, 는 구동기어의 피치원 반경, 는 구동기어의 회전각도를 의미한다(Fig. 3).
2.3 경향성 분석 조건
2.3.1 기어 형상: 기어 몸체
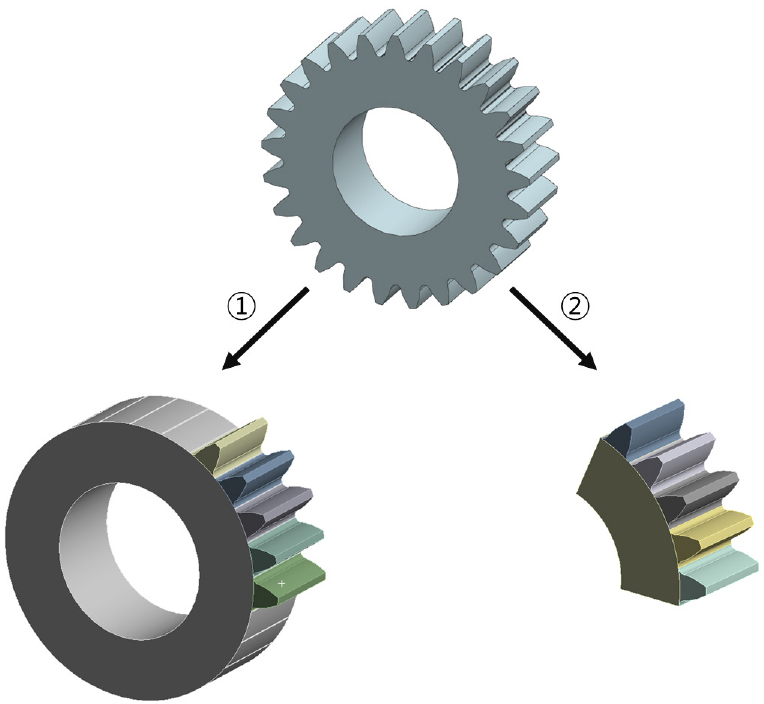
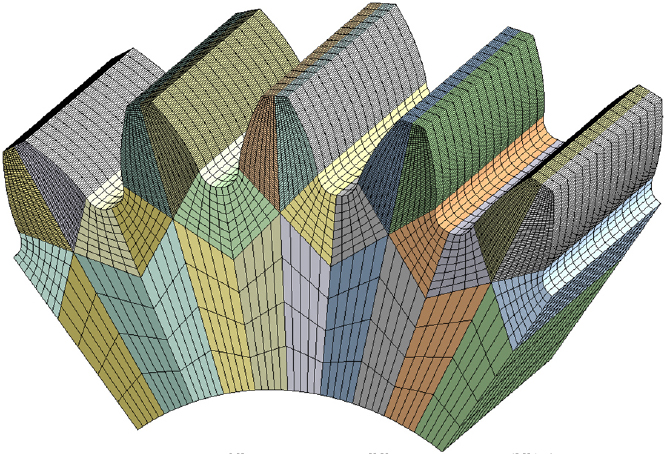
기어의 모든 형상을 모델링하여 구조해석에 사용할 경우 요소망의 수가 많아 해석 시간이 크게 증가한다. 따라서 해석 결과에 관여하지 않는 형상을 제거하여 단순화할 필요가 있다. 일반적으로 많이 사용되는 기어의 형상 단순화 방법은 치접촉에 직접적으로 관여하는 기어 형상은 남겨두되 1) 치접촉에 사용되지 않는 기어 치, 기어 몸체 형상을 모두 제거하거나, 2) 치접촉에 사용되지 않는 기어 치는 제거하고 몸체 형상은 남겨두는 방법이 있다. Fig. 4는 방법 1)과 방법 2)를 적용하여 단순화된 기어 형상을 보여준다. 해석 대상 기어는 물림률이 1.6686이므로 기어 치물림 1주기 동안 이론적으로 치접촉이 이루어지는 치는 총 3쌍이지만, 치 변형에 따라 작용선상 밖에서 접촉하는 경우를 고려하여 인접 2쌍을 남겨두고 다른 치는 모두 제거하였다. 또한 기어 몸체 형상까지 모두 제거하는 방법 2)의 경우 웹의 절단면에 치물림 반력 지지를 위한 조인트를 설정해야 한다.
2.3.2 기어 형상: 치물림 잇수
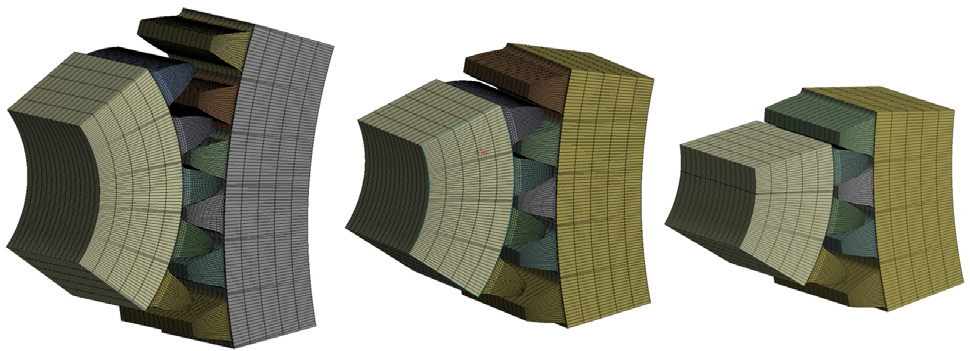
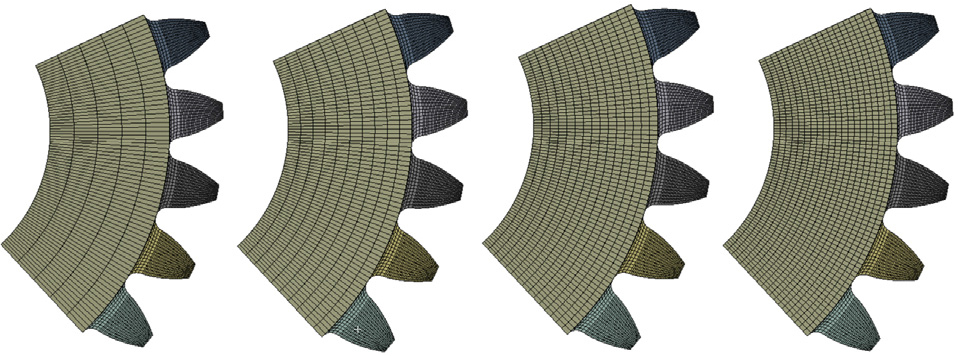
모델 간소화에서 기어의 잇수를 얼마나 남겨둘 것인지에 대해서 분석할 필요가 있다. 물림률이 1~2 사이의 기어는 한 주기의 기어 치물림을 해석하기 위해 최소 3개의 이빨이 필요하다. Fig. 5는 구동기어/피동기어의 치물림 잇수를 5/6개, 4/5개, 3/4개만을 남겨둔 모습이다. 치면 접촉이 이루어지지 않는 이빨을 모두 제거할 경우 요소망 개수가 감소하여 해석 시간은 줄어들 수 있으나, 이빨과 웹의 반력 지지 강성이 달라져 해석 결과에 영향을 미칠 수 있다.
2.3.3 기어 형상: 치폭
치면 수정이 없는 기어의 구조해석 결과는 치폭방향으로 동일하다고 가정할 수 있다. Fig. 6와 같이 기어의 치폭을 축소하고 전달 토크 역시 이에 상응하는 만큼 축소하여 요소당 가해지는 압력을 동일하게 설정할 경우 해석 결과에 영향을 미치지 않으면서 요소망 개수를 감소시켜 해석 시간을 줄일 수 있다.
2.3.4 요소망 생성 방법
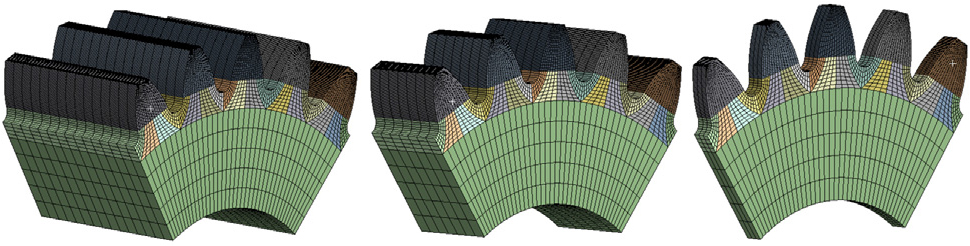
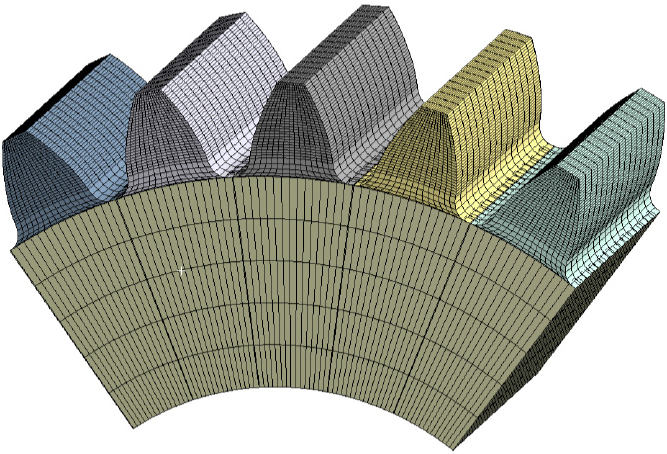
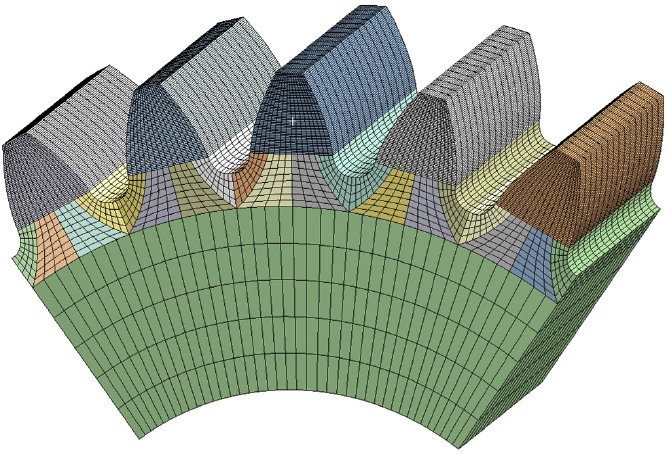
요소망은 3가지 방법을 사용하여 생성하였다. Hwang 등(2013)과 Sirichai 등(1997)이 사용한 첫 번째 방법(Type 1)은 Fig. 7와 같이 기어의 이뿌리원을 기준으로 형상을 구분하여 요소망을 생성한다. 이 방법은 세 가지 방법 중 가장 간단하나 이뿌리 가장자리에 위치한 요소망 형상이 납작하여 요소망의 aspect ratio가 높은 단점이 있다. Chen 등(2019)이 사용한 두 번째 방법(Type 2)은 Fig. 8와 같이 기어를 이빨, 이뿌리, 웹으로 형상을 구분하여 요소망을 생성한다. Hong 등(2013)과 Roda- Casanova 등(2013), Roda-Casanova와 Sanchez-Marin(2019)이 사용한 세 번째 방법(Type 3)은 Fig. 9와 같이 먼저 기어의 웹을 구분하고 이빨, 이뿌리, 림을 가운데 점을 기준으로 여섯 구역으로 나누어 요소망을 생성한다. 두 번째 방법에 비해 세 번째 방법은 치면의 요소망 분할 방향이 치면 압력의 방향과 더 평행에 가깝다. 모든 요소망 생성 방법에서 접촉이 이루어지는 기어 치면은 치폭 방향으로 15등분하였다. Type 1, 2, 3의 각 단면 요소수는 7430, 7650, 7632개로 Type별로 큰 차이가 없었다. Type 1, 2, 3의 평균 Element quality는 각각 0.3525, 0.4467, 0.4504이며, 평균 Aspect ratio는 4.7549, 4.6411, 4.4101로 Type 1< 2<3의 순서로 요소 품질이 우수했다(Element quality와 Aspect ratio는 모두 1에 가까울수록 요소 품질이 우수하다).
2.3.5 요소망 크기: 기어 치면
기어의 구조해석에서 치면은 접촉과 마찰이 발생하고 최대 응력이 나타나는 핵심 요소이다. 치면 요소망이 조밀할수록 접촉영역을 더 정확하게 계산할 수 있으나 요소망의 개수가 증가하여 해석 시간은 증가하게 된다. 요소망의 크기에 따른 결과 비교는 구조해석의 격자 수렴성(mesh convergence)을 확인하기 위해서도 반드시 필요하다.
2.3.6 요소망 크기: 기어 몸체
기어 몸체의 형상이 이빨에 비해 크기 때문에 몸체의 요소망을 조밀하게 설정할수록 전체 요소망의 개수는 크게 증가한다. 해석의 간소화를 위해 기어 몸체의 요소망을 최대한 적은 수로 분할하는 것이 유리하다. Fig. 10은 5/10/15/20등분한 기어 몸체의 요소망이다.
2.3.7 마찰 조건
접촉이 이루어지는 치면의 마찰계수의 영향을 분석해 볼 필요가 있다. 기어 치면의 마찰계수는 윤활조건 및 회전속도에 따라 0~0.2 범위에서 변화하나(Zhou et al., 2018), 모델 간소화를 위해 무마찰 조건에서 해석하는 경우가 많다. 이는 무마찰은 선형 조건인 반면, 마찰이 존재할 경우 비선형 조건이 되어 계산량이 증가하기 때문이다.
2.3.8 Time step: 치물림 주기 분할
기어의 전달 오차는 기어 치물림 주기에 따라 변화하므로, 기어 치물림 주기를 나누어 각 치물림 위치에서의 전달 오차를 구한다. 치물림 주기를 잘게 나눌수록 해석 결과는 정확하나 계산량과 해석 소요 시간이 증가하는 단점이 있다.
2.3.9 해석 조건 정리
기어 유한요소해석 과정에서 영향을 분석할 해석 조건은 Table 2와 같다. 각 해석 조건이 결과에 미치는 영향은 서로 독립이라 가정하였다.
Table 2
Analysis condition
2.4 결과 및 고찰
2.4.1 치면 접촉 응력 분석
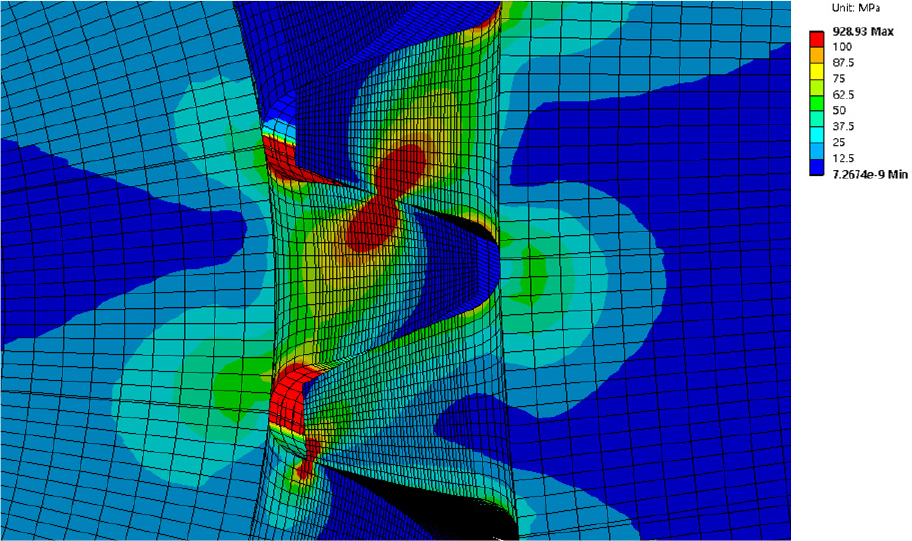
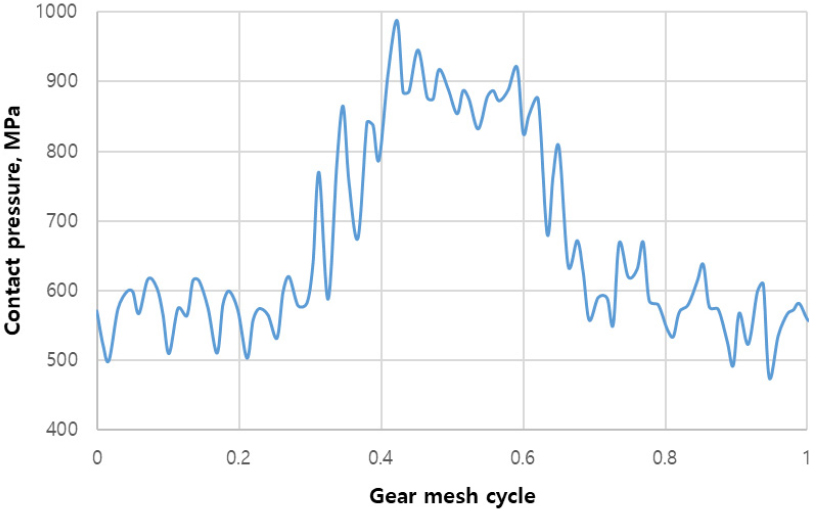
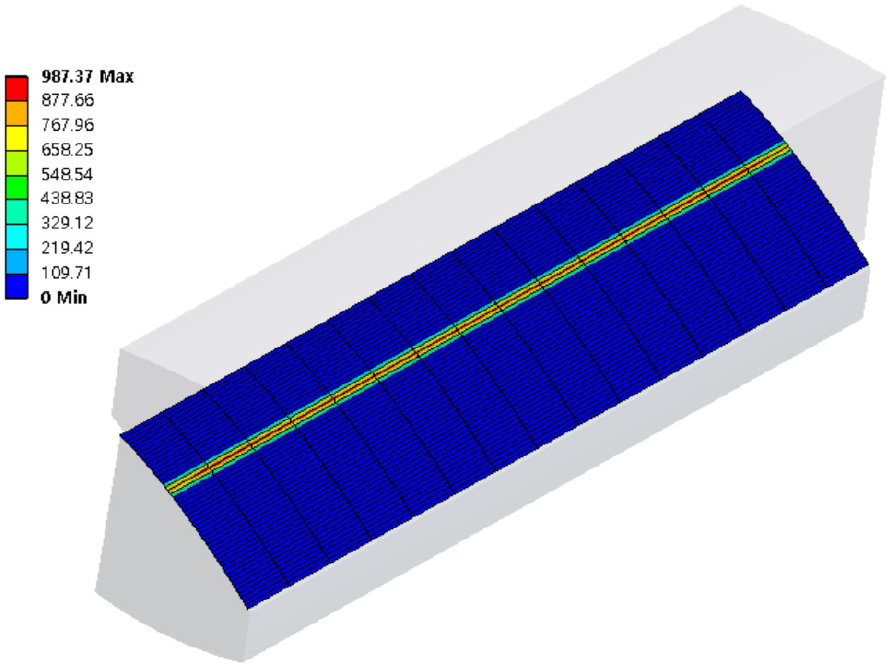
해석 단계별 해석 조건을 변화시키며 기어 구조해석을 수행한 결과를 정리하여 비교하였다. 구조해석을 통해 계산된 응력을 표시한 결과는 Fig. 11와 같으며, 치면의 접촉이 발생하는 지점과 이뿌리를 중심으로 높은 응력이 발생함을 알 수 있다. 기어 치물림 주기에 따라 접촉 지점은 치면의 LPSTC(Lowest Point of Single Tooth Contact)에서 피치점을 지나 HPSTC (Highest Point of Single Tooth Contact)까지 이동하며, 모든 해석 케이스에서 그 양상은 동일하였다. 구조 해석으로 계산되는 최대 응력은 항상 치면 접촉 영역에서 나타나며, 기어 치물림 주기에 따른 접촉면압의 변화 양상은 Fig. 12과 같다.
일반적으로 기어의 치면 접촉 면압은 식 (2), (3)와 같이 Hertz 접촉이론에 따라 두 실린더 탄성체 사이에 하중이 작용할 때의 압력으로 나타낼 수 있다(Budynas and Keith, 2011).
여기서, 하첨자 1, 2는 각각 피니언과 휠 기어를 의미하며, 는 직사각형으로 가정된 접촉면 폭의 절반, 는 최대 접촉 면압, 는 수직하중, 은 유효치폭, 𝜈는 포아송비(Poisson’s ratio), E는 재료의 탄성계수, 는 접촉점의 곡률반경이다.
식 (2), (3)에 단일 치면 접촉이 발생하는 피치점에서의 구동기어, 피동기어 곡률반경 및 하중값과 강철재료의 물성치를 입력했을 때 최대 접촉 면압은 938.6MPa이다. 한편 유한요소해석 결과 최대 접촉 면압은 Fig. 13과 같이 987.37MPa이며, Hertz 접촉식 결과와 오차는 5.19%로 나타나 유한요소해석 결과가 신뢰할 만한 수준임을 확인하였다.
2.4.2 기어 형상: 기어 몸체
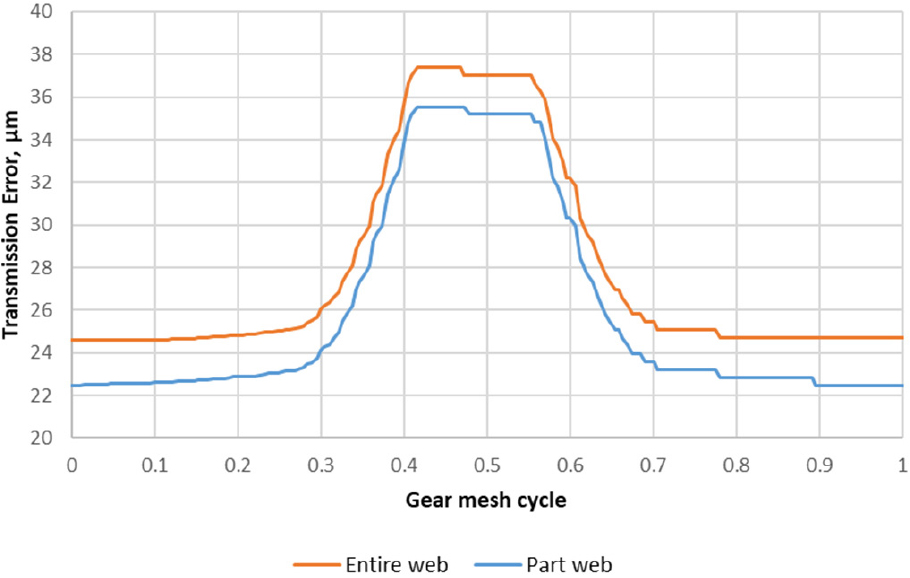
기어 3D 모델의 웹 간소화 방법에 따른 TE 해석 결과는 Fig. 14과 같다. 두 결과 모두 구동기어/피동기어 잇수는 5개/6개, 치폭 100%이며, mesh type 2, 치면 요소망 30분할, 몸체 요소망 20분할, 무마찰, 치물림 주기 분할 1/192 조건으로 해석하였다. 전달오차는 기어 몸체를 전부 고려했을 때보다 일부분만을 고려했을 때 모든 치물림 주기 영역에서 더 작게 계산되었다. 이는 기어 몸체를 일부 제거한 뒤의 단면을 이상적인 Rigid joint로 처리할 경우의 회전 강성이 몸체 전체 요소망의 회전 강성보다 증가하기 때문인 것으로 판단된다. 해석 소요 시간은 기어 몸체 전부를 고려했을 때의 비해 일부만을 고려했을 때 5.5% 감소하였다.
2.4.3 기어 형상: 치물림 잇수
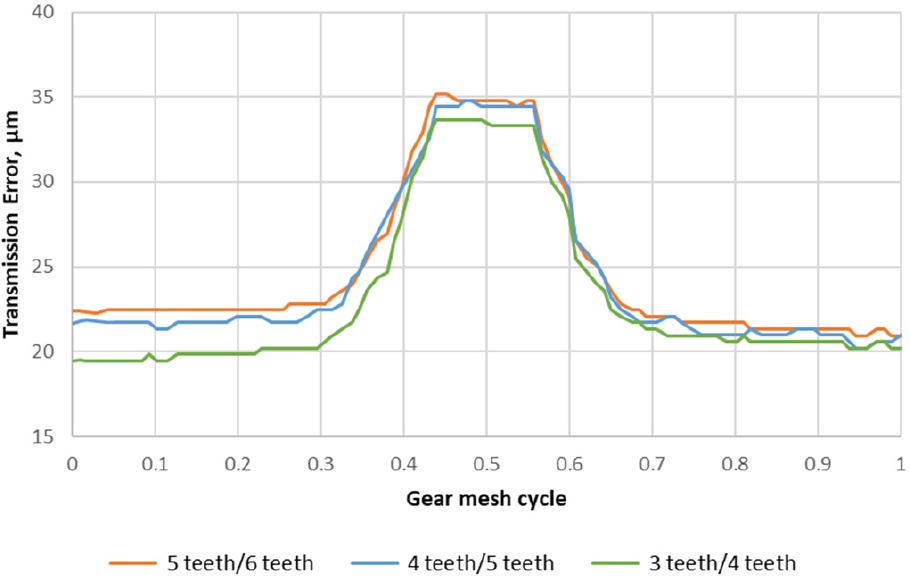
기어 잇수 간소화에 따른 TE 해석 결과는 Fig. 15과 같다. 두 결과 모두 기어 몸체 일부, 치폭 100%, mesh type 1, 치면 요소망 30분할, 몸체 요소망 5분할, 무마찰, 치물림 주기 분할 1/192 조건으로 해석하였다. 기어 잇수를 줄일수록 전달오차는 대체적으로 감소하는 경향을 보였으며, 이는 이빨과 함께 웹 역시 줄어들고 웹의 잘린 단면을 rigid joint로 처리하여 기어의 전체 회전 강성이 증가하기 때문인 것으로 판단된다. 해석 소요 시간은 잇수가 5개/6개일 때에 비하여 4개/5개, 3개/4개일 때 각각 16.7%, 31% 감소하였다. 그러나 이중 치접촉이 발생하는 두 치물림 구간(0~0.3 mesh cycle과 0.7~1 mesh cycle)에서의 전달오차가 서로 다른 경향을 보이는데, 이는 단일 치접촉이 발생하기 전후의 기어 몸체 강성이 변화하기 때문인 것으로 판단된다.
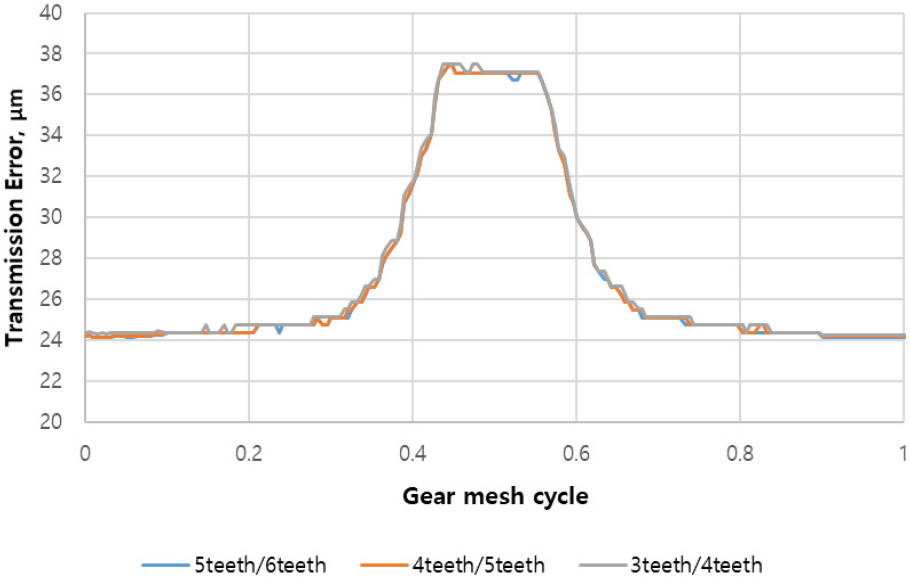
이중 치접촉 전달오차가 기어 몸체의 강성에 의해 변화한 것인지 파악하기 위하여 기어 몸체 전체, 치폭 10%, mesh type 3, 치면 요소망 30분할, 몸체 요소망 5분할, 무마찰, 치물림 주기 분할 1/192 조건으로 기어 잇수를 줄여가며 TE 해석 결과를 비교하였다. 해석 결과 Fig. 16와 같이 치물림 잇수에 따른 전달오차의 차이는 거의 나타나지 않았다. 해석 소요 시간은 구동기어/피동기어의 치물림 잇수가 5/6개일 때에 비하여 4/5개, 3/4개일 때 각각 6.28%, 20.07% 감소하였다.
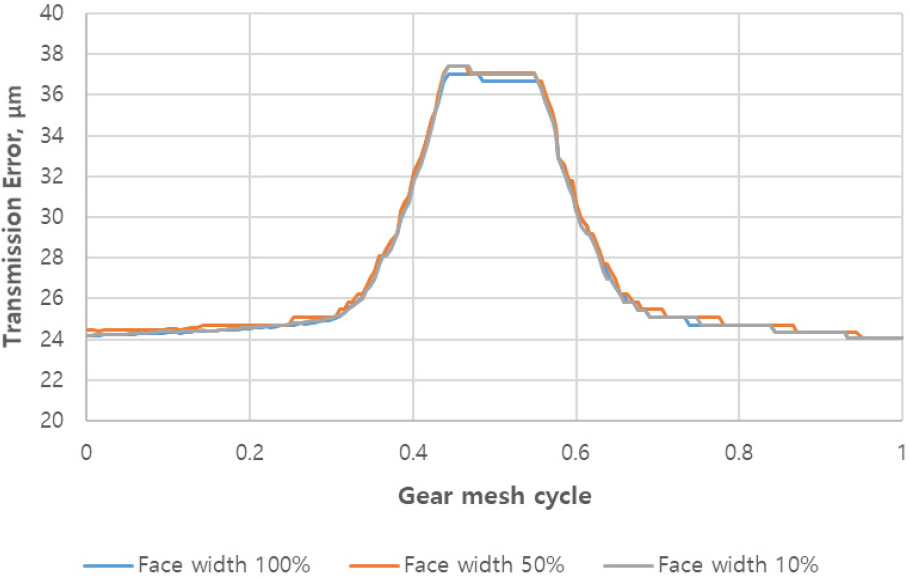
2.4.4 기어 형상: 치폭
기어 치폭 간소화에 따른 TE 해석 결과는 Fig. 17과 같다. 해석 조건은 기어 몸체 전체, 구동기어/피동기어 잇수 5/6개, mesh type 2, 치면 요소망 30분할, 몸체 요소망 5분할, 무마찰, 치물림 주기 분할 1/192로 동일하게 설정하였다. 치폭을 100%, 50% 10%로 감소시키며 전달오차를 계산한 결과는 거의 동일하다. 해석 소요 시간은 치폭이 100%일 때에 비하여 50%, 10%일 때 각각 62.4%, 88.1% 감소하였다.
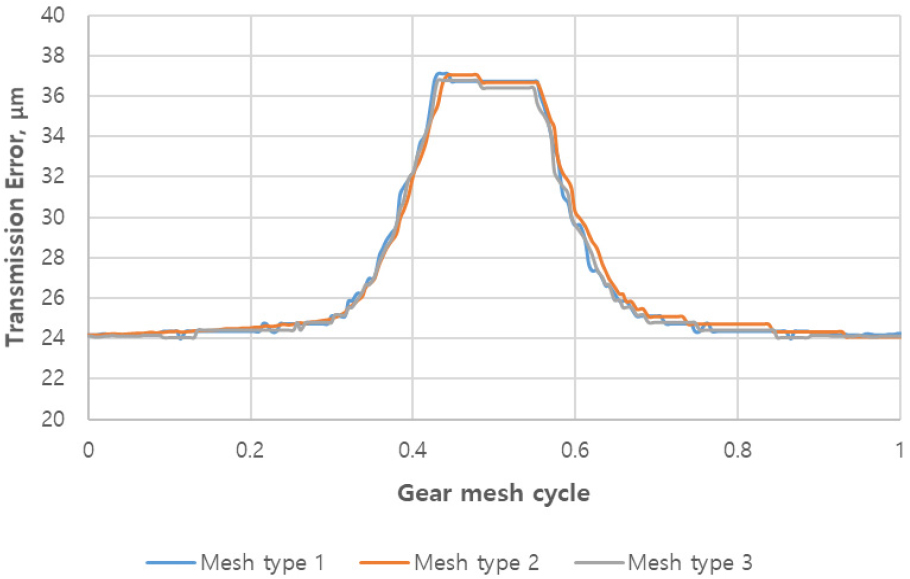
2.4.5 요소망 생성 방법
요소망 생성 방법에 따른 TE 해석 결과는 Fig. 18과 같다. 세 결과 모두 기어 몸체 전체, 구동기어/피동기어 잇수 5개/6개, 치폭 100%, 치면 요소망 50분할, 몸체 요소망 5분할, 무마찰, 치물림 주기 분할 1/192 조건으로 해석하였다. 요소망 생성 방법에 따른 전달오차 해석 결과의 차이는 미미하였다. 해석 소요 시간은 Type 1에 비해 Type 2, Type 3가 각각 28.53% 증가, 5.27% 감소하였다.
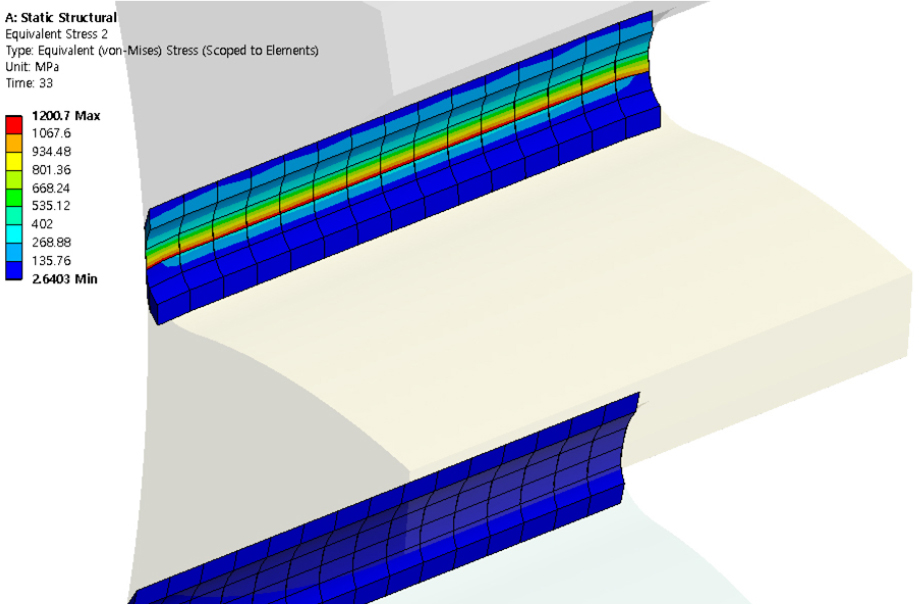
추가적으로 요소망 생성 방법에 따른 이뿌리 응력 결과를 비교하였다. 해석 결과 이뿌리 요소망의 최대 응력은 Type 1, 2, 3에서 각각 1200.7 MPa, 211.9 MPa, 237.1 MPa로 계산되었다. Fig. 19과 같이 요소망 Type 1의 최대 이뿌리 응력은 이뿌리 끝단에 위치한 가장 납작한 요소망에서 발생하였으며, 해당 응력은 요소망의 낮은 품질로 인해 나타난 비정상적 결과로 판단된다.
2.4.6 요소망 크기: 기어 치면
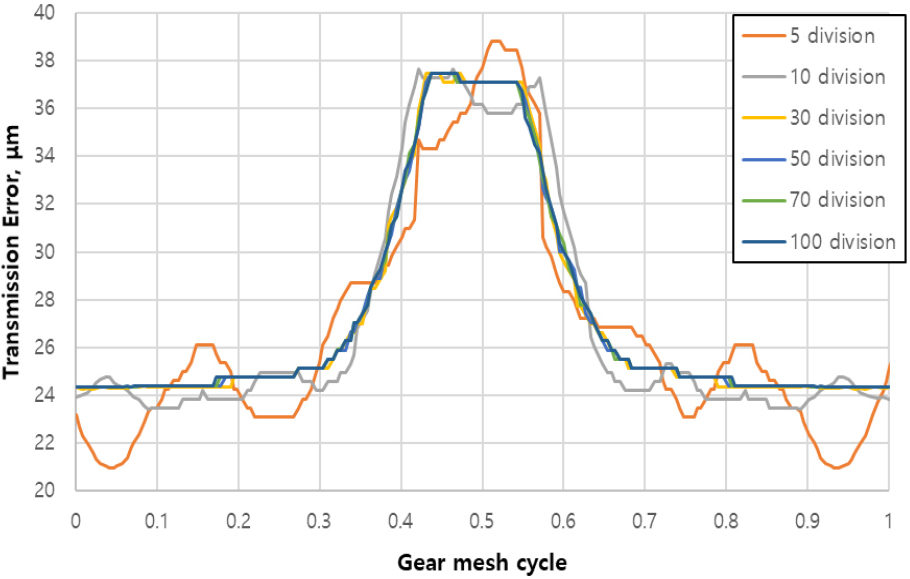
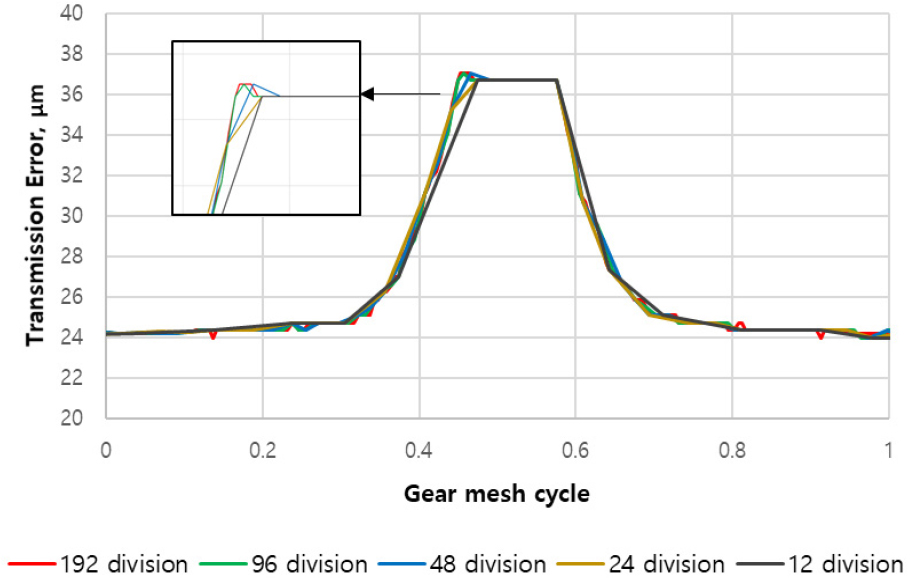
치면 요소망 크기에 따른 TE 해석 결과는 Fig. 20, Fig. 21, Fig. 22과 같다. 해석 조건은 기어 몸체 전체, 구동기어/피동기어 잇수 5/6개, 치폭 10%, 몸체 요소망 5분할, 무마찰, 치물림 주기 분할 1/192로 설정하였다. 해석 결과 치면 요소망을 5등분한 경우 모든 요소망 생성 type에서 접촉영역을 정확히 찾지 못해 전달오차가 치물림 주기에 따라 진동함을 확인할 수 있다. 치물림 주기에 따른 전달오차의 비정상적 진동은 치면 요소망을 잘게 분할할수록 진폭이 감소한다.
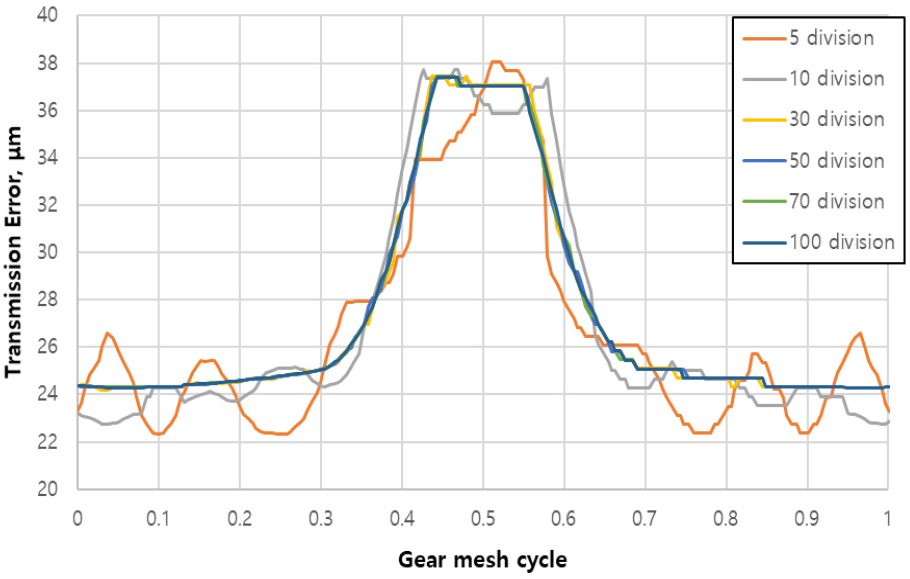
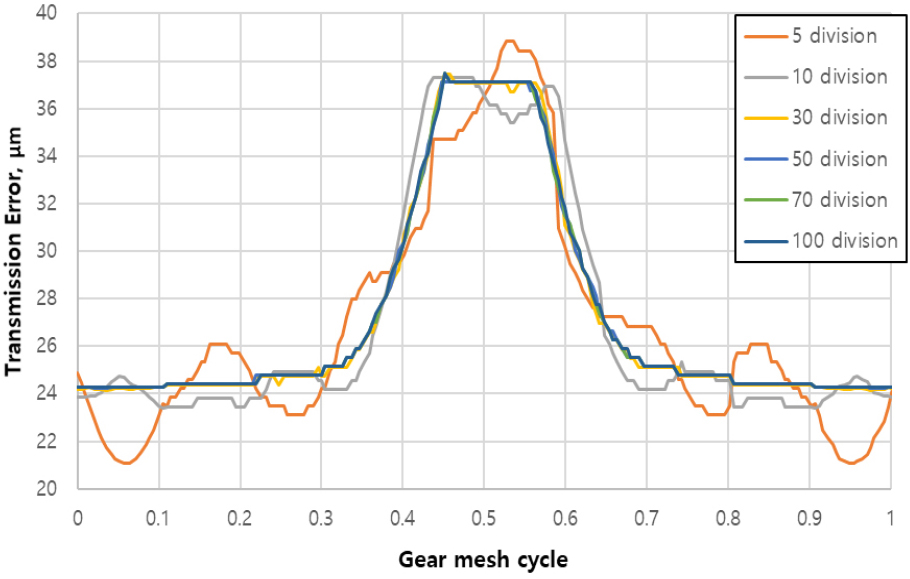
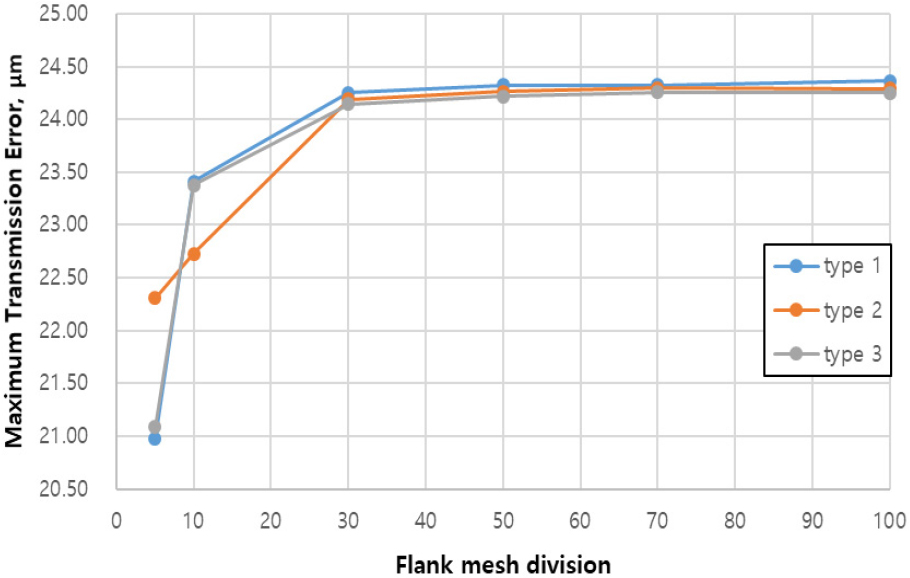
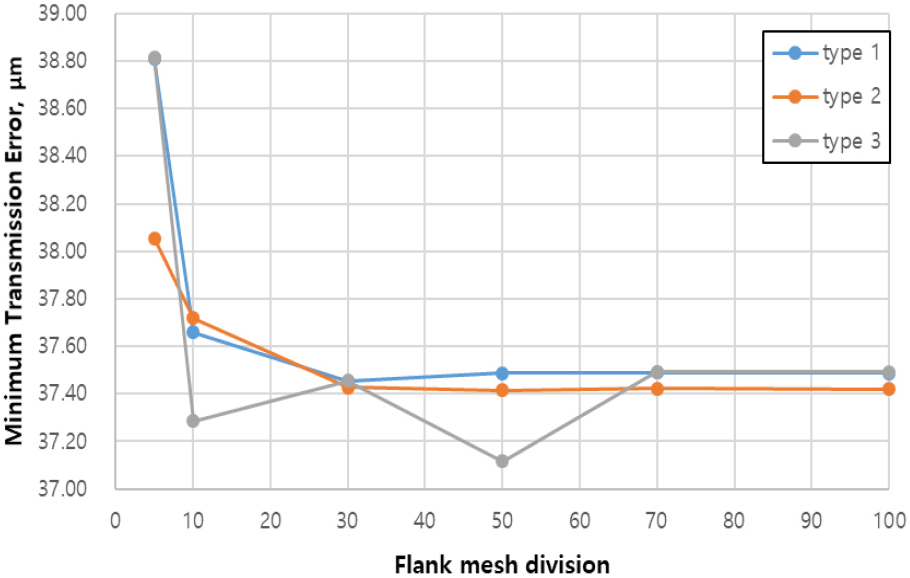
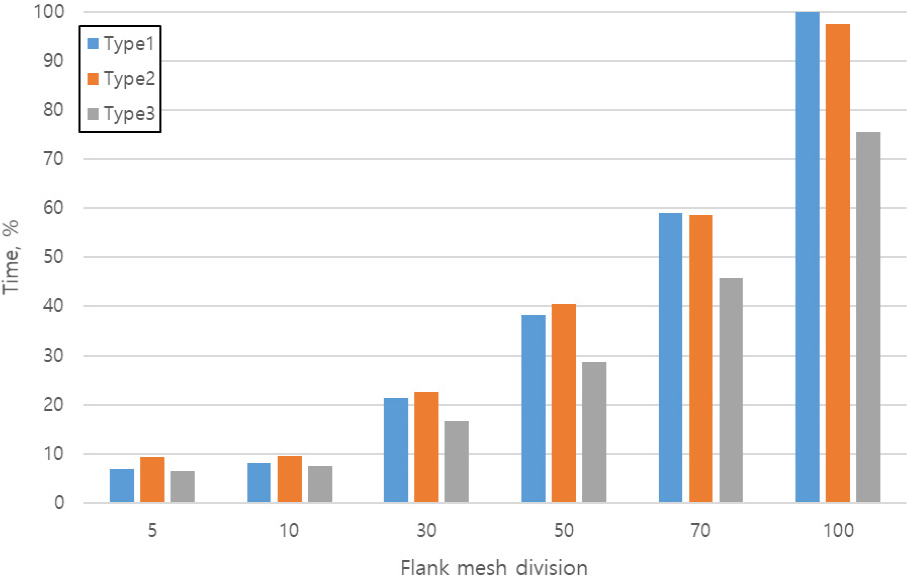
각 요소망 생성 type별 치면 요소망 분할 정도에 따른 최대/최소 전달오차 변화는 Fig. 23, Fig. 24와 같다. 치면 요소망을 30등분 이상 분할했을 때 모든 요소망 생성 type에서 최대/최소 전달오차 값이 수렴하는 것을 확인할 수 있다. 해석 소요 시간은 Fig. 25와 같이 요소망 분할 정도에 비례하여 증가하였다. 동일 요소망 분할 정도에서 type 1, 2의 해석 소요 시간의 차이는 미미하였으나, type 3의 해석 소요시간은 type 1, 2에 비해 25% 가량 작게 나타났다.
2.4.7 요소망 크기: 기어 몸체
기어 몸체의 요소망 분할 크기에 따른 TE 해석 결과는 Fig. 26와 같다. 해석 조건은 기어 몸체 전체, 구동기어/피동기어 잇수 5/6개, mesh type 1, 치면 요소망 30분할, 무마찰, 치물림 주기 분할 1/192 조건으로 동일하게 설정하였다. 전달오차 계산 결과 기어 몸체 요소망 크기에 따른 차이는 나타나지 않았다. 해석 소요 시간은 기어 몸체 요소망을 20분할했을 때에 비하여 15, 10, 5분할했을 때 각각 23.16%, 41.3%, 52.99% 감소하였다.
2.4.8 마찰 조건
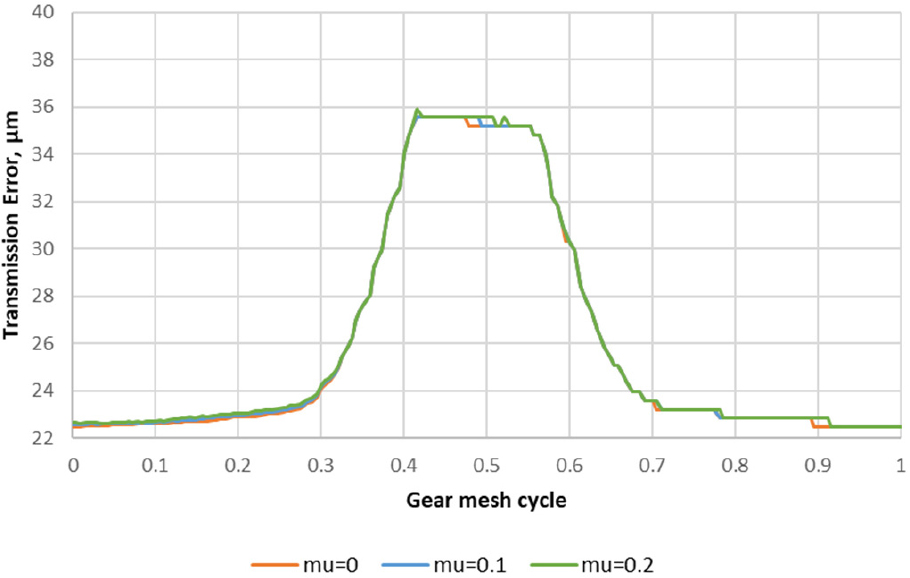
기어 접촉 마찰계수에 따른 TE 해석 결과는 Fig. 27과 같다. 세 결과 모두 기어 몸체 일부, 구동기어/피동기어 잇수 5개/6개, 치폭 100%, mesh type 2, 치면 요소망 30분할, 몸체 요소망 5분할, 치물림 주기 분할 1/192 조건으로 해석하였다. 접촉면의 마찰계수를 0, 0.1, 0.2로 변경하며 해석을 수행한 결과 전달오차의 차이는 1μm 이하로 미미한 수준이었다. 해석 소요 시간은 마찰계수가 0일 때와 비교하여 마찰계수가 0.1일 때 13.5%, 마찰계수가 0.2일 때 24.6% 증가하였다.
2.4.9 치물림 주기 분할
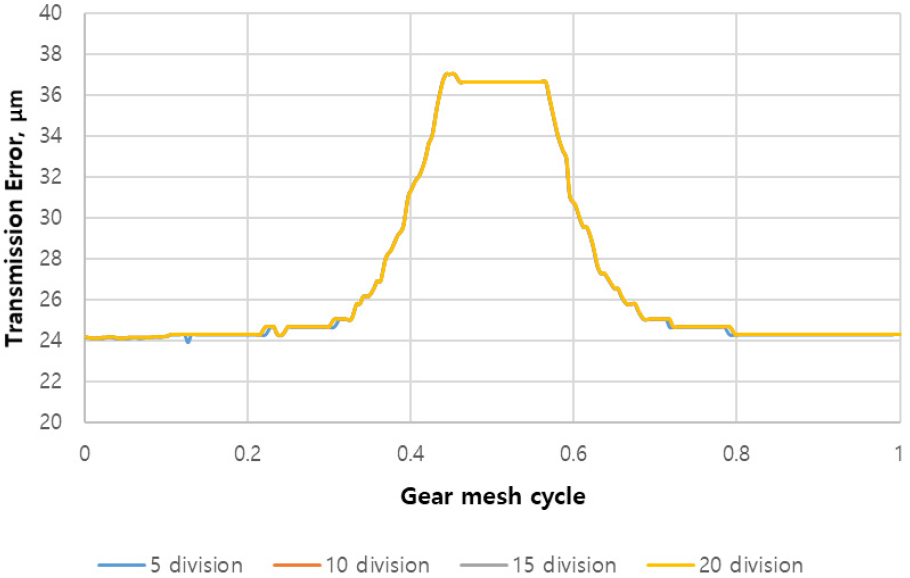
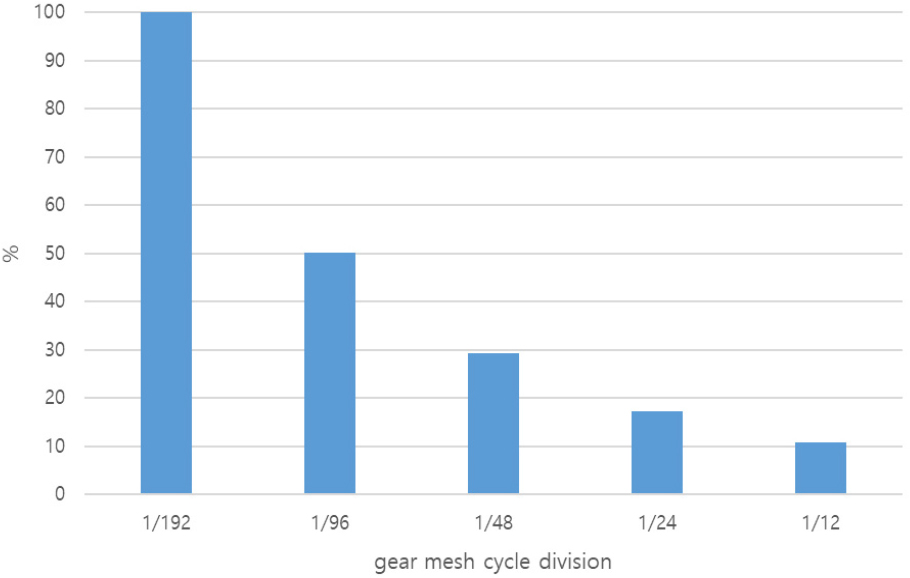
기어의 치물림 주기를 얼마나 잘게 쪼개어 해석하는가에 따른 TE 해석 결과는 Fig. 28과 같다. 치물림 주기 분할을 제외한 해석 조건은 기어 몸체 전체, 구동기어/피동기어 잇수 5개/6개, 치폭 10%, mesh type 1, 치면 요소망 30분할, 몸체 요소망 5분할, 무마찰 조건으로 동일하게 설정하였다. 기어 치물림 주기 분할에 따른 전달오차 해석 결과의 차이는 미미하였다. 다만 치물림 주기를 12등분할 경우 단일 치면 물림이 더 늦게 시작되는 것으로 계산되었다. 치물림 주기 분할에 따른 해석 소요 시간은 Fig. 29와 같이 분할 주기의 크기에 비례하여 감소하였다.
2.4.10 간소화 전후 결과 비교
해석 조건을 간소화하지 않을수록 해석 시간은 증가하나 해석 결과는 더 정확하다고 판단할 수 있다. 따라서 해석 조건을 모두 간소화하지 않은 해석 모델을 대조군으로 삼고, 적절한 간소화를 적용한 해석 모델을 실험군으로 삼아 해석 시간과 전달 오차 결과를 비교하고자 하였다. 대조군의 해석 조건은 기어 몸체를 생략하지 않은 기어 몸체 전체, 구동기어/피동기어 잇수 5/6개, 치폭 100%, mesh type 1, 치면 요소망 100등분, 몸체 요소망 20등분, 마찰계수 0.2, 치물림 주기 분할 1/192로 설정하였다. 실험군의 해석 조건은 기어 몸체 전체, 구동기어/피동기어 잇수 3/4개, 치폭 10%, 치면 요소망 30등분, 몸체 요소망 5등분, 무마찰, 치물림 주기 분할 1/24로 설정하였다. 또한 본 연구의 기어쌍을 대상으로 Kim 등(2023)의 해석적 계산방법을 사용하여 전달오차를 계산하여 그 결과를 비교하였다.
3가지 모델의 전달오차 해석 결과는 Fig. 30와 같다. 대조군의 전달오차는 최대 37.12μm, 최소 24.40μm, 실험군의 전달오차는 최대 37.08μm, 최소 24.18μm로, 두 해석 결과의 최대/최소 전달오차 간의 오차는 1% 이내로 나타났다. 해석 소요 시간은 대조군에 비해 실험군에서 99.64% 감소하였다. 해석적 계산방법을 사용했을 때와 비교하여 유한요소해석을 이용했을 때 단일 치접촉의 전달오차는 3.7% 더 작고, 이중 치접촉의 전달오차는 11% 더 크게 계산되어 3가지 모델의 전달오차 계산 결과가 유사하게 나타났다.

3. 결 론
본 연구에서는 스퍼 기어의 구조해석 조건에 따른 전달오차 결과를 분석하였다. 유한요소해석 조건 중 기어 몸체 및 잇수 단순화, 치폭, 요소망 생성 방법, 요소망 분할, 마찰 조건, 치물림 주기 분할 등이 전달 오차 및 해석 소요 시간에 미치는 영향을 분석하였다. 해석 결과 기어 몸체 형상 및 잇수를 간소화하여 해석 소요 시간을 줄일 수 있으나 몸체 강성의 증가로 전달오차가 감소함을 확인하였다. 요소망 생성 방법에 따른 전달오차의 차이는 미미했으며, 이 중 요소망이 치접촉면에 수직방향으로 분할되는 type 3 방법이 가장 해석 소요 시간이 적게 나타났다. 치면의 요소망은 30분할 이상일 때 전달오차 결과가 수렴한다는 것을 확인하였다. 반면 기어 몸체의 요소망 분할, 치폭, 마찰계수는 값이 커질수록 해석 소요 시간이 증가하나, 전달오차 결과는 크게 달라지지 않았다. 전달오차에 영향을 주지 않는 간소화 설정을 적용하여, 해석 소요시간을 99.64% 감소시키며 전달오차 결과의 차이가 1% 이내인 구조해석 모델을 도출하였다.
