

1. 서 론
현대 지상전에서 장갑 차량은 상대의 방어선을 효과적으로 돌파할 수 있는 전투수단이란 점에서 가장 중요한 지상전력에 속한다. 과거에는 곡사포 및 전차포, 또는 보병의 로켓과 같은 무유도 무기가 장갑 차량의 주된 위협이었다면 최근에는 장갑 차량의 교전 가능 거리 밖에서 일방적인 공격이 가능한 유도 무기가 주요 위협으로 자리 잡고 있다. 특히 최신 유도무기 들은 적외선 유도방식을 채택하고 있는데 목표물에 대하여 별도의 신호 조사가 필요치 않은 수동 유도(passive guidance) 방식과 발사 후 망각(fire and forget)이라는 특성때문에 적외선 유도무기의 위협은 점점 증대되고 있다.
탐지에 사용되는 적외선 신호 대역은 지구 대기의 투과 특성상 크게 둘로 나뉘는데 하나는 3~5μm 파장의 중적외선 (mid wavelength infrared, MWIR)대역이고 다른 하나는 8~12μm 파장의 원적외선(long wavelength infrared, LWIR) 대역이다(Kim et al., 2016). 3~5μm 적외선 신호는 700K 이상의 고온부에서 발생하는 신호이며 엔진, 그 주변부 및 배기가스가 주요 발생원이다. 8~12μm 적외선 신호는 300K 내외에서 방사되는 신호이며 따라서 지상물체의 표면 및 주변 배경과 같은 저온에서도 발생한다. 초창기의 적외선 탐지기가 고온에서 발생하는 3~5μm 대역의 적외선 신호만 탐지 할 수 있었다면 최신 적외선 탐지기는 8~12μm 대역의 신호까지 탐지할 수 있기 때문에 표적의 모든 방향으로부터 적외선 신호를 획득할 수 있다. 특히 최신 적외선 탐색기는 초점 배열 평면(focal plane array)을 사용해 적외선 신호를 이미지 형태로 획득하기 때문에 디코이를 사용한 기만이 더욱 어렵다. 그러므로 배경과 표적에서 각각 방사되는 적외선 에너지의 차이를 인식하는 적외선 무기의 특성상 둘 사이의 에너지 차이를 줄이는 것이 생존성 향상에 중요하다. 특히 저온에서도방사되어 쉽게 탐지 가능한 8~12μm 대역의 적외선 신호 차를 줄이는 것이 필요하다.
장갑 차량의 적외선 신호 특성에 대해 과거부터 여러 연구 (Jacobs, 1989; Westin et al., 2003; Jacobs, 2006)가 수행되어 왔으나, 구체적인 내용의 공개는 여전히 제한되어 있으며, 특히 탐지 방향별 적외선 신호 크기에 대한 정보가 항공기나 함정에 비해 부족한 실정이다. 따라서 본 연구에서는 장갑 차량의 적외선 신호 저감을 위해 차량에 방사율 제어구 조가 적용되어 표면 방사율이 변화할 때, 탐지방향에 따른 8~12μm 대역 적외선 신호 변화를 살펴보고자 한다. 특히 지상의 경우 태양복사에 의한 영향이 크기 때문에 낮과 밤에 대한 적외선 신호 비교도 수행하고자 한다. 이를 위해 상용프로 그램인 RadthermIR 10.4를 사용하여 수치해석을 수행했으며 표면 온도 계산과 적외선 이미지 생성을 거쳐 최종적으로 대비복사강도(contrast radiant intensity, CRI)로 해석 결과를 제시했다.
2. 본 론
본 장에서는 적외선 신호에 대한 이론적인 배경을 간단히 소개한 후 수치해석을 수행하기 위한 방법 및 조건과 대상의 탐지각도별, 방사율 및 시간에 따른 대비복사강도를 제시하고자 한다.
2.1. 방사율과 적외선 신호 특성
표적으로부터 적외선 탐지기로 입사되는 에너지는 크게 두 종류로 구분할 수 있다. 하나는 표적이 자체적으로 방사하는 에너지이며 다른 하나는 표적 주변 배경에서 방사되는 에너지가 표적의 표면에 도달 후 반사되는 에너지이다. 그리고 배경 으로부터 방사되는 에너지는 태양 복사 에너지, 지구 복사 에너지 및 대기에서 산란으로 인한 복사에너지의 합으로 표현 된다. 이를 간단한 식으로 표현하면 다음과 같다.(2)
여기서, L은 radiance(W/m2․sr)에 해당하며, є과 ρ는 각각 표면 방사율 및 반사율을 의미한다.
한편, 에너지 보존 관점에서 표면에서 방사(є), 반사(ρ), 투과(τ)되는 에너지를 다음의 식으로 나타낼 수 있다(White, 2012).(3)
여기서, 본 연구의 모델로 쓰이는 차체는 투과율이 0인 불투명 물질이기 때문에 에너지 보존식은 방사율과 반사율의 합으로만 표현되며 이를 이용해 식 (1)을 변형하면 표면의 적외선 신호를 다음과 같이 방사율에 대한 식으로만 표현할 수 있다.(4)
2.2. 대비복사강도
적외선 유도 무기의 탐지기는 얻어진 적외선 이미지에서 표적과 배경의 복사에너지 대비를 이용해 표적을 탐지한다. 따라서 표적의 복사에너지 크기가 같더라도 배경의 복사에너지 크기에 따라 얻어지는 대비가 다른데 표적의 복사에너지가 배경의 복사에너지보다 클 경우 양의 대비(positive contrast) 가 발생하며, 작을 경우 음의 대비(negative contrast)가 발생한다. 적외선 이미지에서 발생하는 이러한 대비 값을 모두 반영하기 위해 이미지에서 각 픽셀별 절대 대비(absolute contrast)량을 평균 낸 값을 사용하는데 이는 다음의 식으로 표현된다(Kim et al., 2014).(5)
여기서, N은 전체 이미지 내에서 표적에 속하는 총 픽셀 수이며, LT는 표적에 속하는 개별 픽셀의 radiance, LB는 배경의 radiance를 의미하며, 각각의 픽셀과 배경의 절대 복사 대비(absolute contrast radiance)를 모두 더한 다음 표적에 속하는 총 픽셀수로 나누면 표적의 평균 절대 복사 대비량에 해당하는 Cobs(W/m2․sr)를 얻게 된다.
그리고 평균 절대 복사 대비량에 표적의 전체 면적 AT를 곱하면 적외선 신호 지표인 대비복사강도가 얻어지며 이는 다음의 식으로 표현된다.(6)
2.3. 해석 방법 및 조건
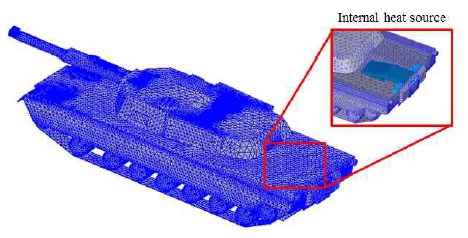
적외선 에너지 해석을 위해 현재 널리 사용되고 있는 3세대 전차 형상을 획득하여 해석에 적합한 형태로 단순화하는 과정을 거쳤다. 이 과정에서 엔진에서 발생하는 배기열로 인한 차체의 온도 상승을 모사하기 위해 차체 내부에 엔진의 내부 배기 덕트를 추가하였다. RadthermIR을 사용하여 열전달 해석을 수행할 때 표면 격자가 사용되므로, ICEM CFD를 사용해 총 86,872 개의 격자를 Fig. 1과 같이 생성하였다.
전차의 재질은 스틸 재질의 균질압연장갑(rolled homogeneous armor)으로 설정하였으며 두께는 차체와 포탑의 몸체는 10cm로, 그 밖의 세부 파트에 대해서는 1cm로 설정 하였다. 기상 조건의 경우 기상청의 측정데이터를 바탕으로 2015년도 여름 중 하루를 선정해 0시와 12시의 기상 정보를 사용하였다. 가상으로 설정한 지표는 검은색 아스팔트를 적용 하였으며 전차 표면의 방사율은 0.1부터 1.0까지 변화시켜 가며 해석을 진행하였다. 대류 열전달의 경우 본 연구에서는 전차가정지 상태에 있다고 가정하였기때문에 해석 시 상온에서 자연대류가 발생할 때의 대류열전달 계수를 적용하였다. 전차 배기 덕트의 경우 안쪽에 자리잡은 덕트의 시작면에 배기가스 온도인 772.15K을 경계조건으로 설정하였으며 덕트 끝 양쪽에 달린 변속기 냉각기는 500K으로 설정하였다. 앞서 말한 내용과 그 밖의 구체적인 수치해석 조건은 Table 1에 정리하였다.
Table 1
Numerical conditions of IR signature analysis
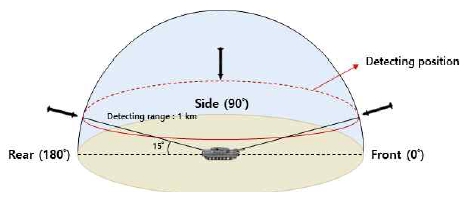
계산된 표면온도를 기반으로 대상 표면과 배경의 radiance를 얻을 수 있으며, RadthermIR 내의 BRDF(bidirectional reflectance distribution function)기능을 사용하면 적외선 탐지기에서 보이는 표적의 이미지를 얻을 수 있다. 그리고 이 과정에서 표적과 배경뿐만 아니라 대기투과에 의한 효과 또한 함께 고려되며 이는 프로그램 내에 내장된 Modtran을 통해 계산된다. 적외선 이미지 획득을 위한 탐지 각도는 Fig. 2에 나타낸 것처럼 주 위협수단인 헬리콥터와 항공기가 접근하는 각도인 지면으로부터 15도 위치에서(Kempinski et al., 2012) 전차의 전방에서 후방에 걸쳐 5도 간격으로 설정했으며 탐지 거리는 1km로 설정하였다. 그리고 적외선 탐지기의 해상도는 가로×세로 960×960 픽셀, field of view는 2°× 2°로 하여 전차의 중심을 바라본다고 설정하였다.
2.4. 해석 결과 및 분석
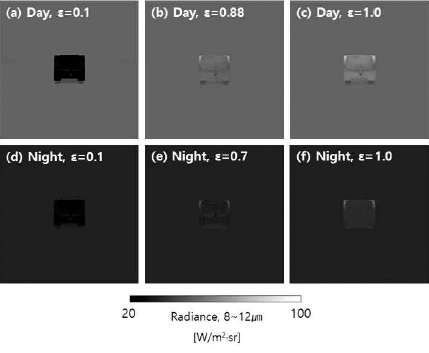
Fig. 3은 표면 방사율이 1일 때, 시간과 탐지 각도에 따른 대비복사강도를 나타낸 결과이다. 밤과 낮 시간에 관계없이 전방보다 후방의 대비복사강도가 큰 것을 확인할 수 있으며 전차의 전방을 바라보는 0도 방향과 후방을 바라보는 180도 방향에서의 강도를 비교했을 때 낮의 경우 3.5배, 밤의 경우는 5.0배의 신호차이를 보이고 있다. 이러한 신호차이가 나타나는 이유를 Fig. 4의 8~12μm 대역 적외선 이미지를 통해 알 수 있는데 우선 전방의 경우 이미지에서 전차의 고온부가 노출되지 않기 때문에 배경과의 평균온도차이가 크지 않으며, 배경과 전차의 방사율 또한 큰 차이가 있지 않기 때문에 작은 복사 대비강도를 갖는다. 그러나 후방의 경우 Fig. 4(b), (d)에서 보이듯이 내부의 엔진열로 인해 전차의 배기구 및 차체 뒷부 분의 가열이 일어나며 그로 인해 방사되는 적외선 에너지가 증가한다. 그리고 탐지각도에 대한 평균 대비복사강도를 낮과 밤으로 비교 했을 때, 낮과 밤이 각각 219.51W/sr, 167.23 W/sr으로 낮이 밤에 비해 31.3% 높은 CRI 값을 지닌다. 시간에 따른 CRI 차이가 나는 이유는 Fig. 5의 표면 온도 분포를 통해 알 수 있는데 낮 시간이 밤 시간보다 작게는 10도 에서 크게는 35도 높은 표면 온도를 보인다. 낮과 밤의 기온 차가 5.8도에 불과하다는 점과 전차 상부의 온도 상승이 측면 보다 두드러지는 점을 보았을 때 태양복사가 표면 온도 상승과 그로 인한 대비복사강도 증가의 원인이라 할 수 있다. 추가적 으로 배기구의 온도가 낮에 약 12도 가량 높은 것을 확인할 수 있는데 이는 전차의 표면 온도가 높아짐에 따라 전도를 통해 배기구의 표면 온도를 높였기 때문이다.
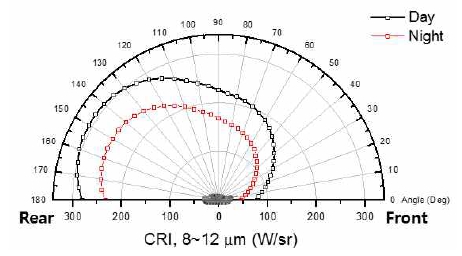

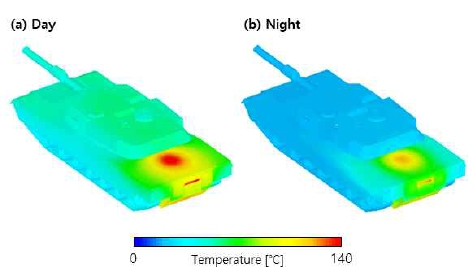
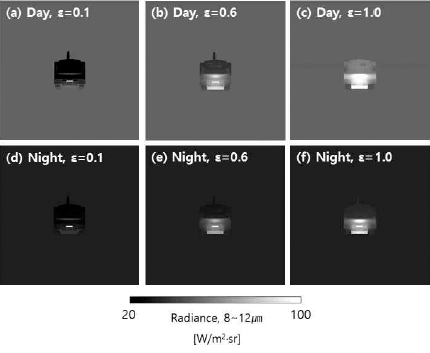
Fig. 6은 전차의 표면 방사율을 변화시켰을 때 대비복사 강도를 시간과 탐지위치에 따라 나타낸 결과이다. 전면, 측면, 후면에서의 결과를 살펴보면 모두 공통적으로 최솟값이 존재 하며, 그 최솟값에 해당하는 방사율은 낮에는 전면, 측면, 후면 순으로 0.88, 0.7, 0.88이고 밤에는 0.7, 0.2, 0.6이다. 이러한 결과가 발생하는 이유는 Fig. 7을 통해 이해할 수 있는데 최솟값에 해당하는 방사율보다 낮은 방사율의 경우 Fig. 7(a), (d)처럼 전차 표면의 평균 radiance가 배경의 radiance보다 작기 때문에 대비복사강도가 음의 대비로 발생 한다. 반면 Fig. 7(c), (f)와 같이 방사율이 높은 표면의 경우 전차 표면의 평균 radiance가 배경의 radiance보다 높기 때문에 양의 대비로 적외선 신호가 발생한다. 그리고 둘 사이에 위치한 Fig. 7(b), (e)의 경우 전차 표면의 radiance가 배경의 것과 가장 유사한 값을 보이며, 이로 인해 전차와 배경 사이의 구분이 다른 경우에 비해 뚜렷하지 않게 되어 가장 작은 대비 복사강도를 보인다.
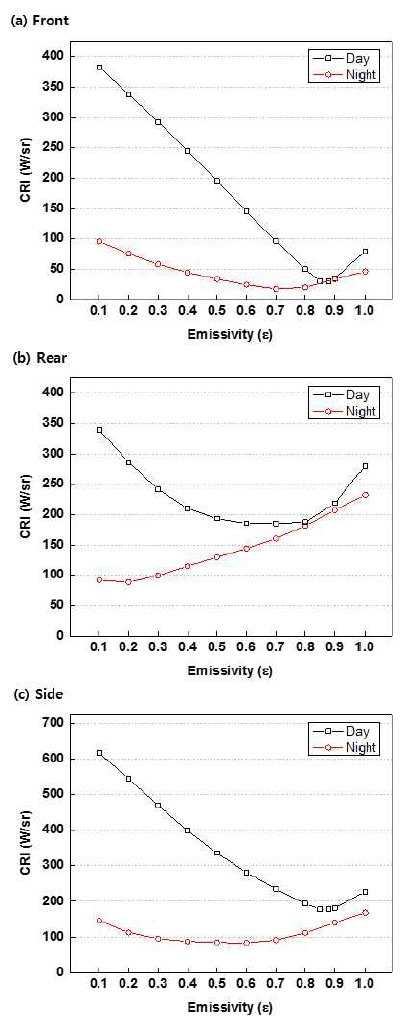
Fig. 6
CRI of tank as function of surface emissivity and detecting position. (a) front, (b) rear, (c) side
세 위치에서 대비복사강도가 최솟값이 되는 방사율은 낮 시간이 밤 시간보다 모두 높은 것을 확인할 수 있는데 이는 태양복사의 영향으로 인해 지표 배경의 radiance가 높아졌으며 그에 따라 전차 표면 또한 밤에 비해 높은 radiance를 가져야 대비가 작아지기 때문이다. 이러한 결과는 실제 전장 상황에서 적외선 신호를 최소화 하려면 태양 복사가 미치는 영향을 고려 하여 시간에 따라 다른 방사율을 적용해야 함을 의미한다.
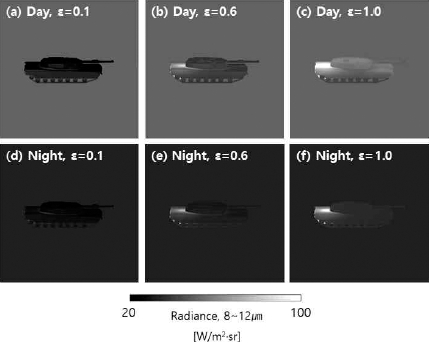
전차 후면의경우정면과비교했을 때최솟값에해당되는방사 율이 낮은데 이러한 차이는 엔진에 의해 가열된 고온부에서 원인을 찾을 수 있다. 복사 에너지가 방사율과 온도의 네제곱에 비례하기 때문에 Fig. 8(d), (e), (f)와 Fig. 6(b)의 밤의 경우에서 볼 수 있듯이, 표면 방사율이 감소하면 배경과 고온부 사이의 양의 대비가 감소하면서 전체적인 대비복사강도가 감소한다. 또한 낮 시간 전차 후면의 최소 대비복사강도는 전면의 최소 대비복사강도의 6.25배의 값을 가지는데 이러한 결과가 나타난 이유는 Fig. 8(b)에서 찾을 수 있다. Fig. 8(b)는 대비복사강도가 최소인 경우임에도 불구하고 전면과 달리 배경과의 대비가 뚜렷이 나타나는데 Fig. 8(a), (c)와 달리 고온의 차체 뒷부분에서는 양의 대비를 보이며 상대적으로 저온인 포탑부분은 음의 대비를 보인다. 대비복사강도는 절대 값의 합으로 표현 되기 때문에 두 종류의 대비가 대비복사강도에 모두 기여하며 결과적으로 후면은 이미지 내에서 부분별 radiance 차이가 작은 전면보다 훨씬 큰 최솟값을 보인다.
90도에서 바라본 측면의 경우 Fig. 9에 나타나는 바와 같이 고온부가 일부 보임에도 불구하고 방사율이 변했을 때 대비복사강도가 변화하는 경향이 정면에서 봤을 때와 더 가까운 모습을 보인다. 이는 탐지기에 보인 전차의 이미지 내에서 고온부가 차지하는 비율이 작기 때문에 고온부가 아닌 부분의 특성이 더 반영됐기 때문인 것으로 추정된다. 만약 90도보다 조금 더 큰 각도에서 볼 경우 후방의 배기면이 잡히기 때문에 방사율 변화에 따른 신호특성 변화가 후방에서 봤을 때에 더 가까워질 것으로 예상된다.
방사율을 변화시켰을 때 대비복사강도를 방향 및 시간별로 얻은 결과는 지상 배경 조건에서 차량 적외선 신호를 최소화 하기 위해 한 가지의 방사율만을 적용해서는 안되며, 차량의 부분에 따라 다른 방사율을 적용해야함을 의미하고 있다. 즉, 정지상태의 차량에서 배경과의 온도차가 상대적으로 크지 않은 전면이나 측면의 경우 배경의 방사율과 비슷한 값으로 적용하고, 표면 온도가 많이 상승하는 엔진 주변부는 배경 보다 낮은 방사율을 적용하는 것이 적외선 신호를 저감하는데 효과적일 것이다.
3. 결 론
본 연구에서는 공대지 조건에서 시간 및 방사율과 탐지위치 별로 전차에 대한 적외선 신호 해석을 수행하였다. 이를 위해 RadthermIR 프로그램을 사용하여 전차의 표면온도를 계산 했으며, 계산된 표면온도로부터 적외선 이미지를 얻어낸 다음 대비복사강도를 산출하여 이를 비교하였다.
시간에 따른 적외선 신호를 비교했을 때, 밤과 낮의 평균 적외선 신호가 30% 이상 차이가 나며, 배경과 표적의 radiance 에 모두 영향을 준다는 점에서 지상 표적의 적외선 신호 해석 시 태양복사의 고려는 필수적이라 할 수 있다. 또한 방사율을 변화시켜가며 시간 및 방향에 따른 대비복사강도를 비교했을 때 적외선 신호가 최소가 되는 방사율이 존재하며 주어진 조건 으로 계산 시 최솟값에 해당하는 방사율은 낮에는 전면, 측면, 후면 순으로 0.88, 0.7, 0.88 이고 밤에는 0.7, 0.2, 0.6 으로 뚜렷한 차이를 보인다. 따라서 지상 장갑 차량의 적외선 신호를 효과적으로 저감하기 위해서는 표면온도에 따라 부분 별로 다른 방사율을 갖는 제어 구조의 적용이 필요하다는 결론을 내릴 수 있다 .
본 연구결과는 장갑 차량의 적외선 신호 저감을 위한 방사율 제어 구조의 설계 및 적용 시 기초 가이드라인으로 활용 될 수 있을 것으로 기대되며, 최종적으로 차량의 생존성 증대에 기여할 수 있을 것으로 예상된다.
