

1. 서 론
과적차량의 운행은 도로파손 및 교량 수명 감소의 주요 원인으로 각 축의 중량 1톤 초과 시 승용차 11만대 통행 시와 같은 영향을 미쳐 평상시 보다 2.5배 이상의 보수 및 보강비용이 발생하여(Jang, 2012) 이와 관련된 비용이 매년 증가하고 있는 추세이다(국토해양부, 2012). 현재 전국 고속도로 톨게이트 및 본선에 High/Low Speed Weigh-in- Motion(WIM) 시스템이 운영되고 있으나 축 조작, 기계오작동 유도, 우회도로 이용 등의 단속회피 방법이 다양하며, 장비 내구성 및 운영상의 문제로 인해 단속 실적이 미비한 상황이다(Jang, 2012). 이러한 단점을 해결하고자 교량을 주행하는 상태에서 측정된 교량의 응답을 기반으로 통행 차량의 중량을 산출하는 Bridge Weigh-in-Motion(BWIM) 시스템에 대한 연구가 지속적으로 이루어지고 있다. BWIM 시스템은 일반적으로 주행차량에 의한 교량의 변위 측정 장치, 주행차량의 속도와 축간 간격에 대한 정보를 수집하는 축 감지기, 그리고 데이터 수집 장치로 구성된다. 1979년 미국의 F. Moses 등에 의해서 처음 시도된 BWIM 시스템은 호주, 슬로베니아, 아일랜드 등 여러 국가에서 정확도 및 적용 대상 확대를 위해 연구개발 중이며, 국내에서도 다수의 연구진에 의해 연구 중이다. 지금까지의 BWIM 시스템의 경우 영향선 이론에 기초한 BWIM 시스템을 이용하거나 인공신경망 이론을 이용한 BWIM 시스템 등이 개발되고 있다(Lee, 2011). 또한 BWIM 시스템의 개발을 위해 필수적으로 수행되어야 하는 차량 주행시험의 경우 그 비용과 시간이 많이 소요되고 다양한 주행 조건의 적용이 어렵기 때문에 그 과정을 최소화하고 신뢰성을 높이기 위해 사전에 수치시뮬레이션을 수행하여 현장적용시 제약조건을 보완하는 방법에 대한 연구도 매우 중요하다. 이를 위해 차량 주행에 따른 교량의 동적특성인 모드형상과 고유진동수를 추출하고, 해석결과와 측정결과를 비교하여 동적특성을 반영하도록 검증해야 하나, 기존의 수치시뮬레이션 연구의 경우, 이 과정을 생략한 채 수행되어 왔다(Oh, 2013).
본 논문에서는 교량의 동적특성을 반영하여 수치 시뮬레이션을 수행하였고, 수치해석을 통해 주행차량의 속도와 각 축 간격을 추정하여 BWIM 시스템을 이용한 각 축의 중량 및 총 중량 추정을 수행하였다. 이러한 연구결과는 차량 주행실험의 제약조건을 보완하고, 차량 주행시험의 효율성을 높이는데 기여하여, 향후 BWIM 시스템을 이용한 중량추정의 정확성 향상에 기여할 수 있을 것으로 생각된다.
2. BWIM 시스템의 이론적 배경
BWIM 시스템은 차량이 교량을 주행하는 상태에서 측정된 교량의 응답을 기반으로 통행 차량의 총중량 및 각 축의 중량을 산출하는 방법으로, 기본적으로는 교량부재의 영향선을 이용하여 산출한다. 또한 적용 영향선에 따라 정적 및 동적 영향선을 이용한 방법으로 나눌 수 있으며, 본 연구에서는 교량의 동적 특성을 반영할 수 있는 동적 영향선을 이용한 방법을 적용하였다(Jeon, 2012; Jung, 2012).
2.1 주행차량의 동적 영향선
동적 영향선의 경우 측정지점 i에서의 영향선을 구하기 위해 중량과 각 축간 간격을 알고 있는 시험차량이 교량의 임의의 지점을 통과할 때의 응답은 식 (1)과 같은 d차 다항함수 형태로 된 영향선 함수를 이용하여 근사화할 수 있다는 가정을 바탕으로 추정된다. 따라서 계산된 교량의 변형률은 식 (2)와 같이 다항함수 형태의 영향선 ∫(x(t))과 주행차량의 n번째 Pn축의 중량 의 곱으로 표현할 수 있으며, 식 (3)과 같이 계산 변형률 ei(j∆t)과 측정 변형률 간의 편차 제곱의 합인 식 (5)를 편미분하여 최소화함으로써 다항식 함수의 계수 ad를 구할 수 있다.
여기서, i는 측정지점, t는 시간, x(t)는 시간에 따른 교량 상의 위치, n은 주행차량 축의 수, j는 샘플링 수, ∆t는 데이터 시간간격을 말한다.
2.2 주행차량의 중량 추정
주행차량이 교량을 통과할 때 임의의 시간 t에서의 측정위치의 변형률은 식 (4)와 같이 주행차량의 각 축의 중량, 교량 위의 측정위치에서의 영향선 그리고 시간에 따른 주행차량의 위치로 나타낼 수 있다. 여기서, n은 주행차량의 차 축수, An은 n번째 차량 축의 중량, Ini(xn)은 주행차량의 n번째 축이 교량 위의 xn에 위치할 때의 측정지점 i에서의 영향선 값 그리고 xn은 시간 t에서 n번째 축의 위치를 나타낸다.
이 때 계산 변형률(e,(t))과 측정 변형률(e,*(t))의 편차 제곱의 합은 식 (5)와 같이 나타낼 수 있으며, 주행차량의 각 축의 중량은 식 (5)의 편차 제곱의 합(E)을 편미분하여 최소화함으로써 구할 수 있다. 여기서, 측정시간 t는 샘플링수 j와 데이터 측정 시간간격 ∆t의 곱으로 나타낼 수 있으며, Tmax는 측정 변형률의 전체 샘플링 수, Imax는 변형률 측정위치의 수이다.
식 (5)의 편미분 결과는 식 (6)과 같으며, 이 식은 다시 식 (7) 및 식 (8)과 같이 표현한 수 있다. 여기서, 식 (9)는 각 측정지점에서의 영향선으로 이루어진 행렬식과 같으며, 식 (8)은 측정 변형률과 영향선으로 이루어진 행렬식이다. 이 때 식 (4)에 포함된 Ini(xn)인 측정지점 i에서의 영향선 값을 2.2절의 방법을 이용하여 추정하여 식 (7)과 식 (8)의 영향선 값으로 이용하고, 식 (9)의 {A}를 h계산하여 주행차량의 중량을 추정할 수 있다.
3. BWIM 시스템을 이용한 주행차량 중량 추정
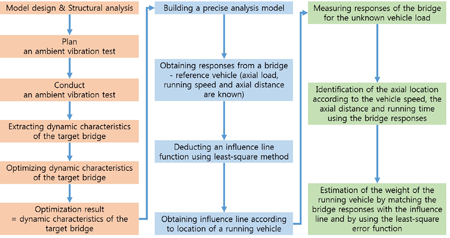
본 연구에서는 Fig. 1과 같이 상시 고유진동수 및 모드형상을 고려하여 획득한 정밀해석모델을 기반으로 차량의 단독주행조건에 대한 수치시뮬레이션을 수행하고, BWIM 시스템을 이용한 통행차량 중량추정을 수행하였다. 중량추정에 사용한 교량응답의 경우 대상교량의 중간지점 상부 슬래브의 하면에서 획득한 변형률 응답을 이용하였으며, 이를 이용하여 총중량 및 각 축의 중량 분리를 실시하였다. 차량의 주행속도 및 각 축의 간격의 경우 이격거리를 알고 있는 임의의 2개 지점을 선정하여 전단변형률을 획득하고, 축의 통과 시간차와 이격거리를 통해 추정하였다. 주행속도 및 각 축의 간격 추정 결과는 주행차량의 중량을 추정하는데 이용하였다.
3.1 대상교량선정
본 연구에서는 경기도 안성시 공도읍에 위치한 안성IC육교를 수치시뮬레이션 대상교량으로 선정하였다. 대상교량은 단경간으로 구성된 π형 라멘교량이다. 대상교량의 경우 선행연구자료(Park, 2012; Lee ,2011)를 이용하기 위해 선정되었으며, 선행연구자료 중 상시진동시험 데이터를 이용하여 교량의 동적특성인 고유진동수와 모드형상을 반영하도록 최적화된 정밀해석모델을 이용하였다. 대상교량에 대한 전경과 상세설명은 Fig. 2, 3과 같다.


| Type | Rahmen bridge |
|---|---|
| Location | Gongdo-eup, Anseong-si, Gyeonggi-do, Korea |
| Route Name | Gyeongbu Expressway |
| Width | 19.3m |
| Length | 38m(10m+18m+10m) |
| Line | 4 |
| Span | single span |
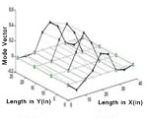
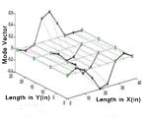
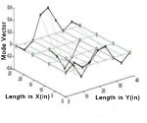
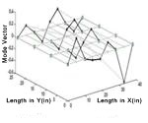
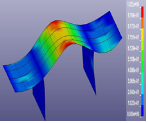
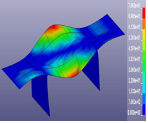
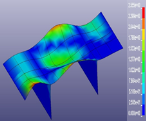
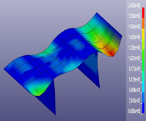
대상 교량의 동적특성을 확인하기 위해 상시 진동시험 결과와 정밀해석모델의 고유진동수 및 모드형상을 비교하였으며, 그 결과는 Fig. 4와 같다. Fig. 4의 (a)~(d)는 상시 진동시험의 모드형상 및 고유진동수이며, (e)~(h)는 정밀해석모델의 모드형상 및 고유진동수이다. 고유진동수의 경우 진동시험 결과로부터 3차 모드 형상을 추출할 수 없었으며 따라서 1, 2, 4, 5차 모드에 대하여 비교를 수행하였다. 상시 진동데이터를 기준으로 일반 유한요소모델의 경우 1, 2차 모드의 경우 약 10% 이상의 오차가 발생하였으며, 정밀해석모델의 경우 모든 모드에서 약 ± 1.5% 내외의 오차가 발생하였다. 따라서 본 연구에서 사용된 정밀해석모델이 상시 차량 통행시의 교량의 응답을 매우 유사하게 모사하고 있음을 확인했다.
3.2 수치해석 시뮬레이션
3.2.1 수치해석 조건
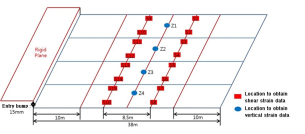
본 연구에서는 교량의 3차선 및 4차선(Fig. 5의 L3, L4)을 단독으로 주행하는 경우에 대하여 수치해석을 수행하였다. 수치해석의 경우 외연적 수치해석 프로그램인 LS-DYNA를 사용하여 수행하였다. 차량과 교량을 각각 모델링하고 각각의 구조계 사이의 접촉 조건을 정의하여 이동 중의 차량의 중량이 하중으로 작용할 수 있도록 하였으며, 각각 시뮬레이션 조건에 따른 속도로 교량을 통과하도록 하였다. 교량의 중앙 지점에서 변형률을 획득하여 중량 추정을 위한 데이터로 사용하였으며 8.5m의 이격간격을 두고 측정된 변형률 데이터를 이용하여 주행차량의 속도 및 축 간격을 추정하였다. 이와 같은 시뮬레이션 기법을 이용하여 교량과 차량의 진동 및 상호작용을 현실적으로 모사할 수 있으며, 차량의 부가질량 효과로 인한 고유진동수 이동도 표현이 가능하다(Lee, 2011).
주행 시나리오의 경우 Table 1과 같이 2축~5축의 주행 차량이 60, 80, 100, 120km/h의 주행 속도로 3차선 및 4차선을 주행하도록 하였고, Table 2와 같이 주행차량의 각 축 하중을 구성하였다. 또한 주행 차량의 중량의 경우 각각의 주행 위치와 주행 속도에 대하여 시험 차량과 검증 차량으로 구분된 차중을 적용하였다. 시험 차량의 중량의 경우 각 축 차량의 공차 중량을 적용하였으며, 검증 차량의 경우 각 축 차량의 과적 상태를 나타내는 차량 중량을 적용하여 총 64가지의 주행 시나리오에 대하여 시뮬레이션을 수행하였다.
3.2.2 주행 차량 모델
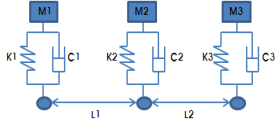
교량의 동적응답 해석을 위한 차량 모델링 기법은 1자유도 이동질량모델을 시작으로 다자유도 3차원 모델까지 다양한 연구가 진행되어 왔다(Lee, 2011). 본 연구에서는 Fig. 6과 같이 1자유도계 스프링-댐퍼 시스템으로 구성된 시험차량을 모델링하여 시뮬레이션을 수행하였다. 각각의 축 수와 좌, 우측의 차륜을 고려하여 스프링-댐퍼 시스템을 구성하고 축의 중량 분배율을 고려한 각각의 축 중량과 차량의 고유진동수 및 감쇠비를 이용하여 식 (10)을 이용하여 각 차량의 감성 및 감쇠계수를 계산하였다. 기존 연구(Park, 2008)에서는 각각의 차량의 고유진동수 및 감쇠비에 따른 교량 응답의 모사 정도에 대한 연구가 이루어졌으며, 이때 실제 응답을 가장 근사하게 모사한 차량의 고유진동수(f)는 3.5Hz와 감쇠비(ε) 3%를 본 연구에도 동일하게 적용하여 계산하였다.
Table 1
Numerical simulation cases for the vehicle on the 3rd lane of the target bridge (same cases were repeated in the case of 4th lane)
Table 2
Configuration of the axle load of the vehicle
3.3 시뮬레이션 결과
단독주행 조건에 대한 변형률 응답을 획득하고 2장에서 소개한 BWIM 시스템을 이용하여 주행차량의 각 축의 중량 및 총 중량을 추정하였다. 주행차량의 경우 차량의 진행방향을 기준으로 좌측과 우측의 축 중량이 동일하다 판단하고 한쪽 방향에서의 각 축의 중량 및 총 중량을 추정하였다.
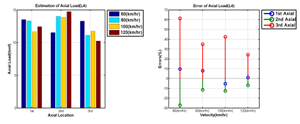
3.3.1 시험차량 주행 시 중량추정 결과
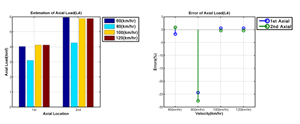
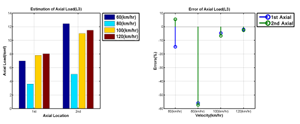
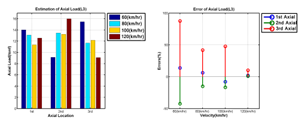
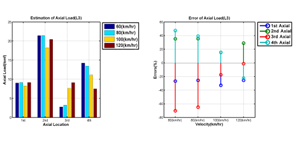
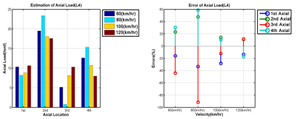
시험차량 주행에 따른 차량의 각 축의 중량추정 결과는 Fig. 7 및 Fig. 8과 같고, 차량의 각 축 수별 주행속도에 따른 중량추정 결과를 비교하였다. 주행차량의 각 축의 중량추정 결과의 경우 2축, 3축, 4축 차량의 경우 대체적으로 주행차량의 중량을 정확하게 추정할 수 있었다. 그러나 5축 차량의 경우 그 결과가 주행속도에 따라 상이하게 변하였으며, 정확한 중량추정이 어려웠다. 중량추정 오차의 경우 2축 차량의 경우 주행속도 80km/h를 제외하고 5%이내로 중량추정이 가능하였으며, 80km/h 주행 시 약 30%정도의 오차가 발생하였다.
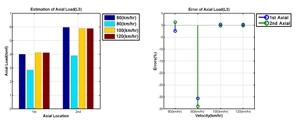
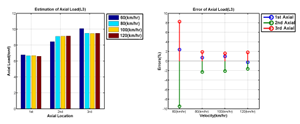
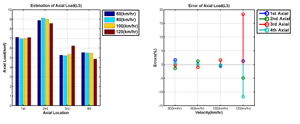
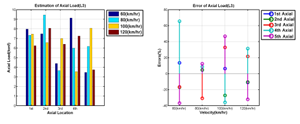
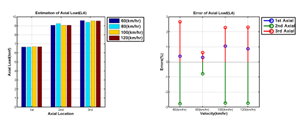
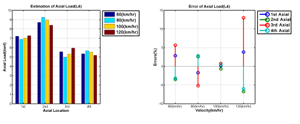
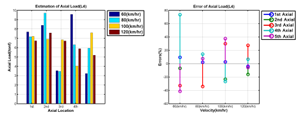
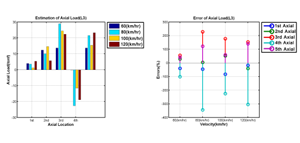
3축 차량의 경우 주행차량의 모든 속도 구간에 대하여 정확한 중량추정이 가능하였다. 그 오차의 경우 최대 오차가 10%이내로 발생하였으며, 60km/h경우를 제외한 나머지 주행속도에 대하여 2%이내의 오차로 중량추정이 가능하였다. 이와 반대로 4축 차량의 경우 최대속도 구간인 120 km/h에서 20%이내로 가장 큰 오차가 발생하였으며, 이를 제외한 나머지 구간에서 역시 2%이내로 중량추정이 가능하였다. 앞의 3종류의 차량과 다르게 5축 차량에 대해서는 각각의 주행속도에 대하여 모든 구간에서 정확한 중량추정이 어려웠으며, 그 최대 오차가 약 65%정도로 발생하여 그 결과를 신뢰할 수 없었다. 주행차량의 중량추정 결과의 경우 주행 속도 보다 차량의 축 수에 영향을 더 크게 받는 것을 확인할 수 있었다.
차량의 4차선 주행의 경우 3차선 주행과 비슷한 양상으로 신뢰할 수 있는 중량추정이 가능하였으나, 4축 및 5축 차량의 경우 현행 과적단속 측정오차범위를 벗어난 중량추정 결과가 나왔다. 4축 및 5축 차량 중에서도 10%이내로 중량추정이 가능한 차량의 축 중량이 있었지만, 대부분의 축에서 주행속도에 따른 중량추정 오차가 10%이상 발생하였다.
3.3.2 검증차량 주행 시 중량추정 결과
시험차량을 이용하여 획득한 영향선을 이용하여 검증차량 주행에 대한 중량추정 결과는 Fig. 9 및 Fig. 10과 같다. 우선 검증차량의 중량추정 결과의 경우 그 오차가 시험차량을 이용한 중량추정과 비교했을 때 보다 매우 큰 오차의 결과를 보였다. 각각의 주행 차량 및 주행 속도에 대하여 대부분 10%이상의 오차가 발생하였으며, 이는 현행 과적단속기준의 측정오차범위를 넘는 값으로 신뢰할 수 없었다.
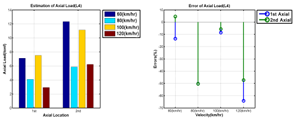
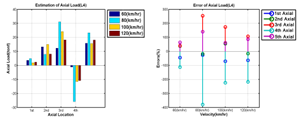
오차가 발생한 원인에 분석한 결과 각각의 각 축의 간격에 해당하는 영향선을 배치하는 부분에 있어 첫 번째 원인이 있었다. 시험차량과 검증차량의 각 축의 간격에 있어서 배치가 유사하지 않았기 때문에 시험차량의 영향선이 검증차량의 변형률 응답을 정확하게 모사하지 못했다. 차량의 축의 수는 동일하나 각 축의 간격 배치 비율이 달랐기 때문에 차량분류표 상에서의 대표 차량이 동일하지 못하였다. 그러나 각각의 축에 따른 응답은 정확하게 모사하지 못했으나, 주행차량의 총 중량에 대한 결과는 대체적으로 유사한 추정이 가능하였다. 따라서 추후 BWIM 시스템 개발에 있어 주행차량 선정 시 차종 분류표에 따라 각 축의 간격이 유사한 분배를 갖는 동일한 차량을 적용해야 한다고 판단된다. 따라서 수치 시뮬레이션을 통한 BWIM 시스템 구성 시 영향선을 추출하는 대표차량 선정이 중량추정 결과에 영향을 미친다고 판단된다.
4. 결 론
본 연구는 교량의 동적특성을 반영할 수 있는 정밀해석모델을 기반으로 주행 중인 차량의 중량을 추정할 수 있는 BWIM 시스템의 검증을 실시하였다. 단독주행 형태에 대하여 차량의 각 축의 중량 분리 및 총 중량 추정을 통하여 검증을 실시하였으며, 주행차량의 경우 60km/h부터 120km/h까지 20 km/h씩 증가시키며 주행 시뮬레이션을 수행하였다. 교량과 차량의 상호작용을 고려하기 위하여 두 구조계의 접촉조건을 정의하고, 차량의 중량이 교량 상의 하중으로 작용하도록 하였다. 공차중량을 대표하는 시험차량과 과적차량을 대표하는 검증차량을 적용하여 중량 추정 오차를 비교하였다.
①정밀해석모델의 모드 해석을 실시하고 상시진동시험에 의한 고유진동수 및 모드형상을 분석한 결과 약 ±1.5%이내의 오차가 발생하였다.
②시험차량 및 검증차량에 대하여 총 64가지의 경우에 대하여 수치시뮬레이션을 실시하였으며, BWIM 시스템을 이용한 중량추정을 실시하고 그 결과를 비교하였다.
③시험차량을 이용한 중량추정 결과의 경우 3차선 및 4차선 주행의 경우 2축, 3축 및 4축 차량의 주량추정이 15%이내로 가능하였다. 그러나 5축 주행차량의 경우 그 평균 오차가 약 30%정도 발생하였다.
④검증차량의 경우 중량추정 결과가 2축, 3축 및 4축 차량의 경우 5축 차량에 비하여 정확도는 향상되지만, 그 평균오차가 약 40%이상으로 발생하였다.
⑤검증차량의 중량추정 오차의 경우 영향선 추정을 위한 차량 선정에서 각 축 간격의 비율이 상이하였으며, 그로 인하여 큰 오차가 발생한 것으로 판단된다.
⑥추후 영향선을 이용한 BWIM 시스템 적용 시 영향선 추정을 위한 대표차량 선정이 중량추정 결과에 큰 영향을 미치는 것을 확인하였다.
결론적으로 본 연구에서 제안하는 정밀해석모델을 기반으로 하는 BWIM 시스템을 이용한 중량추정의 경우 중량추정 시 적용하는 영향선 함수가 중량추정 결과에 큰 영향을 미치는 것을 확인하였다. 따라서 국내 차종 분류를 기반으로 다양한 종류의 차량에 대한 영향선 검증이 필요하다 판단된다. 또한 2대 이상의 병행차량 주행에 대한 추정중량의 신뢰성 확보 문제를 해결하여 차량 주행실험의 제약조건을 보완할 수 있는 방법으로 발전할 것으로 판단된다. 따라서 이와 같은 내용에 대한 추후 연구가 필요하며 더 나아가 지능형교통시스템(ITS) 구성에 있어 효율적인 교량 구조물 관리 및 과적 차량 관리를 위한 기술 발전에 기여할 것으로 사료된다.
