

1. 서 론
2. 잡음을 고려한 강건한 최적 센서배치
2.1 센서 수에 따른 최적 센서배치
2.2 SNR과 모드별 잡음 영향을 고려한 최적 센서배치
3. 수치해석 결과 및 분석
3.1 입력 지진동
3.2 원전 격납 건물 해석모델
3.3 잡음을 고려한 강건한 최적 센서배치
4. 요약 및 결론
1. 서 론
2016년 경주지진과 연이어 발생한 2017년 포항지진은 대한민국 원자력발전소의 내진 안전성에 대한 큰 화두를 불러 일으켰다. 다행히 2011년 후쿠시마 원전사고처럼 두 지진 모두 원자력발전소 안전에 큰 문제를 일으킨 것은 아니지만 대국민적으로 큰 불안을 야기하였으며, 경주지진은 진원 부근에서 원전 설계지진력을 상회하였다(Kim, 2017). 이에 한수원은 가동원전에 대해 0.3g 수준까지 내진보강을 완료하는 등 조치를 취했으며(NSSC, 2018), 원자력안전위원회는 지진 시 원전의 수동정지 결정시간을 4시간에서 2시간으로 단축한 바 있다(NSSC, 2017). 이에 따라 지진 감시계통 운영이 더욱 민감해졌으며, 실시간 모니터링 및 안전진단 기술의 중요성이 더욱 부각되고 있다.
현재 우리나라 모든 가동원전에는 지진 감시계통이 운영되고 있으며 보통 자유장 지반에 가속도계 1개, 구조물 주요 위치에 가속도계 1~2개 등이 설치되어 있다(Park and Kim, 2008). 지진 감시계통의 운영목적은 주로 계측된 지진동의 운전기준지진(OBE), 안전정지지진(SSE) 초과여부를 판단하기 위함이다. 즉, 현재 체계는 설계 및 시공 당시 고려된 지진동을 고려할 뿐 실시간의 구조물 상태 및 동특성을 추출하는 데에는 한계가 있다. 우리나라와 비슷한 지진 감시계통 수준으로 원전 격납건물의 고유진동수를 추정한 국외 사례가 있으나(Chu and Kang, 2021), 단일 센서의 활용으로 잡음에 취약하며 모드형상을 추출하지 못하는 한계가 있었다. 따라서 원활한 시스템 식별(system identification) 및 동특성 추출을 위해서는 다수의 센서를 최적으로 배치하여 전역적인 거동 데이터를 신뢰성 높게 획득하여야 한다.
구조물의 건전도 모니터링을 위해 센서의 수와 위치를 최적화하는 연구는 주로 1990년대부터 꾸준히 진행되어 왔다. 특히 Kammer(1991)는 Fisher information matrix를 최대화하여 센서 위치별 모드의 선형 독립성 및 정보량을 최대화하는 effective independence(Efi) 방법을 개발하였고, 이 방법은 최적 센서배치 분야에 널리 활용되었다. Carne와 Dohrmann(1995)은 MAC (Modal Assurance Criterion)을 최소화하여 최적 센서배치를 결정하는 방법론을 제시하였다. MAC은 식 (1)과 같이 표현된다.
여기서, 는 i번째 기준모드형상을 의미하여, 는 j번째 비교모드형상을 의미한다. MAC 행렬은 두 개의 모드형상 벡터 간의 상관 관계를 의미하며, 두 벡터 사이의 각도가 크면 비대각선 요소의 값이 작아져 상관관계가 낮다는 것을 나타낸다. 따라서 모드형상의 상관관계를 나타내기 위해 MAC 행렬의 비대각선 요소를 목적함수로 선정하여 최적센서 배치에 활용한다(Lee and Eun, 2022). 이외에도 KE(Kinetic Energy), IE(Information Entropy)등과 같은 다양한 지표를 활용한 최적 센서배치 연구가 진행되었다(Heo et al., 1997; Papadimitriou et al., 2000). 또한 이러한 방법론을 기반으로 유전 알고리즘(Genetic Algorithm; GA)과 같은 다양한 최적화 알고리즘 응용 연구로 발전되어 왔다(Guo et al., 2004; Huang et al., 2016). 그러나 이러한 대부분의 연구는 대상 구조물이나 고려 조건을 중심으로 최적화하고 검증하기 때문에 모든 상황에 적합할 수는 없다(Tan and Zhang, 2020). 특히, 원전 구조물의 동특성을 원활하게 추출하기 위한 최적 센서배치 연구는 수행된 바가 없다. 따라서 본 연구에서는 원전 격납 건물의 특성에 적합한 최적 센서배치를 수행할 수 있는 방법론을 제안하고 고려인자를 고찰하였다.
원전 격납 건물은 두께 1m가 넘는 철근콘크리트에 프리스트레싱까지 적용되어 동적응답이 미미할 가능성이 높으며, 주변 기기 진동으로 인한 잡음이 존재한다(Choi et al., 2013). 게다가 지진의 세기는 천차만별이므로 미미한 신호대잡음비(signal- to-noise ratio; SNR)에도 강건하게 신호를 획득하여 동특성을 추출할 수 있는 센서 배치가 되어야 한다. 또한 원전 격납 건물은 구조물 특성상 저차모드의 모드 기여도가 지배적인 구조물이다(Joe and Cho, 2002). 따라서 기존 연구처럼 다수의 대상 모드를 고려하기 보다는 상대적으로 소수의 대상 모드가 필요하며, 대상 모드의 기여도 차이가 크기 때문에 대상 모드별로 신호의 잡음 차이가 크게 나타난다. 이에 모드별 잡음의 정도를 분해하여 분석할 필요가 있다.
이에 본 연구에서는 원전 격납 건물의 실시간 모니터링 및 동특성 추출을 위해 잡음의 수준과 모드 기여도를 고려한 최적 센서배치 방안을 제시한다. 먼저 MAC과 유전 알고리즘을 활용하여 센서 수별 최적배치를 도출하고, 다양한 SNR에 따른 모드별 잡음 정도를 분석하기 위해 센서 응답에 백색 잡음(white noise)을 반복적으로 부여하여 모드형상을 추출하는 수치해석을 수행하였다. 이후 최적센서 배치의 강건도와 모드별 잡음 영향을 MAC 지표로 분석하여 센서 수 및 배치를 결정하는 방법론을 제안하고, 고려인자(SNR, 센서 수, 대상모드)간의 상관관계를 분석하였다.
2. 잡음을 고려한 강건한 최적 센서배치
원전 격납 건물의 잡음을 고려한 강건한 최적 센서배치는 두 단계로 이루어진다. 먼저, 다양한 센서 수에 따른 최적 센서배치를 잡음을 고려하지 않고 도출한다. 그 이후 다양한 SNR 하에서의 강건도와 모드별 잡음 영향을 평가하여 최종적으로 강건한 최적 센서배치를 결정한다. 이 장에서는 해당 방법론을 소개하고자 한다.
2.1 센서 수에 따른 최적 센서배치
최적 센서배치를 위해 가장 먼저 고려해야 할 것은 추출해야 할 정보를 정의하는 것이다. 본 연구의 경우에서는 구조물의 모드 정보 획득을 목적으로 하기 때문에, 모드참여질량비가 높은 순으로 대상 모드를 선정하였다. 다음으로는 대상 구조물의 FE model에 가진할 지진동을 선정해야 한다. 해당 지진동은 모든 대상 모드가 잘 식별될 수 있는 주파수 성분을 가지도록 해야 한다(Carne and Dohrmann, 1995). 최종적으로는 최적 센서배치를 위해 비용함수와 최적화 알고리즘을 선정하여 수행한다. 본 연구에서는 계산량이 적으면서도 모드형상의 선형적 독립성을 직접적으로 나타낼 수 있는 auto MAC을 비용함수로 선정하였다. 최적화 알고리즘으로는 기하급수적인 연산량을 효율적으로 수행하는 휴리스틱 알고리즘인 유전 알고리즘을 채택하였다. 유전 알고리즘은 자연의 진화현상을 모방한 것으로 교차(crossover), 변이(mutation), 선택(selection) 단계로 수행되며, 최적 센서배치 문제에 주로 활용되고 있다(Tan and Zhang, 2020). 이를 통해 정해진 센서 수에 따른 최적 배치안을 도출할 수 있다.
2.2 SNR과 모드별 잡음 영향을 고려한 최적 센서배치
잡음을 고려하기 위해서는 입력과 출력 데이터에 Gaussian white noise를 부여하고 반복적으로 수치해석을 수행한다. 이 때 SNR은 요구되는 수준을 고려하여 다양한 경우를 부여한다. Gaussian white noise를 반복적으로 부여하게 되면 매번 추출되는 모드형상도 변동되며, 모드형상 매트릭스들의 auto MAC을 도출하면 앞서 설명한 것과 같이 모드의 선형 독립성을 표현할 수 있다. 그 기준치로는 0.25 이하가 되었을 때 선형 독립성을 확보한 것으로 간주하였다(Carne and Dohrmann, 1995). 다시 말해 주어진 센서 수와 SNR 하에서 변동되는 모드형상 매트릭스들 중 기준치를 충족하는 비율이 높다면 강건한 최적 센서배치로 평가할 수 있는 것이다. 다만, auto MAC은 다른 모드와의 선형 독립성을 비대각선 요소로써 평가하는 것이기 때문에 각 모드별 잡음 영향을 분별하기 어렵다. 각 모드별 잡음 영향을 개별로 분석하기 위해서는 고유치 해석으로 산출한 모드형상 매트릭스와 입력과 출력에 잡음을 부여하여 추출된 모드형상 매트릭스의 cross MAC을 계산하여 분석할 수 있다. Cross MAC은 행렬의 대각선 요소를 통해 비교되는 모드형상의 일치성을 평가할 때 활용되며, 모드별로 그 정도를 관찰할 수 있다. 그 기준치는 0.8 이상이 되면 모드가 일치한 것으로 간주한다(Michel et al., 2008). 따라서 cross MAC의 대각선 요소의 기준치 충족 여부를 평가함으로써 모드별 강건도를 분석할 수 있게 된다.
3. 수치해석 결과 및 분석
3.1 입력 지진동
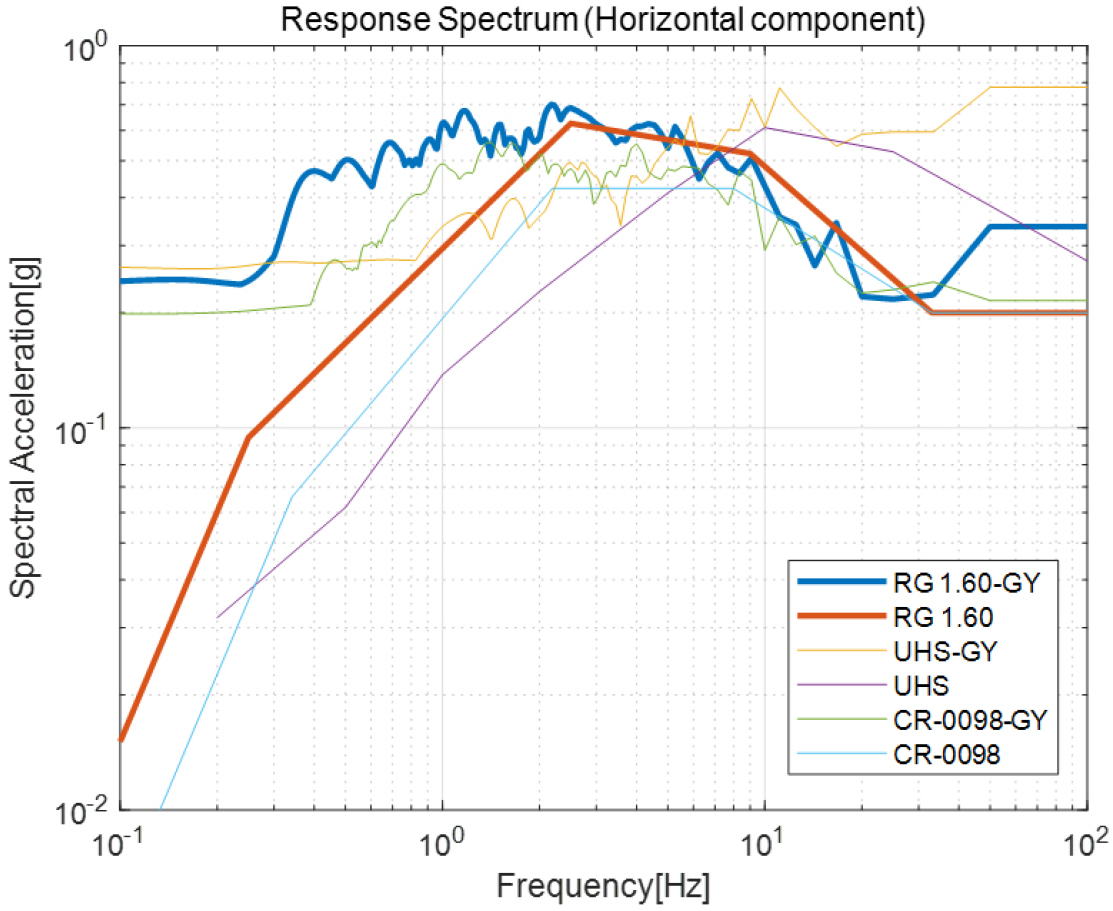
입력 지진동을 생성하기 위해 원전의 설계응답스펙트럼인 USNRC RG 1.60, NUREG-CR0098, 신울진 원전 부지의 등재해도 스펙트럼(Uniform Hazard Spectrum)을 고려하였다. 지진 시간이력은 경주지진(2016년, USN, N-S direction) 지진 데이터를 SAP 2000의 ‘Time history matched to response spectrum’ 기능으로 고려한 응답 스펙트럼 주파수 성분과 유사하도록 변환 및 생성하였다. 응답스펙트럼들을 Fig. 1과 같이 비교한 결과 원전 격납건물 1차 고유진동수(4.57Hz)의 응답은 USNRC RG 1.60 응답스펙트럼에서 가장 주요하였기에 해당 응답스펙트럼으로 추출한 시간이력을 활용하였다. 지진동의 샘플링 주파수는 100Hz였으며, 총 30초의 시간이력이 포함되었다.
3.2 원전 격납 건물 해석모델
해석모델로서 한국 원전 OPR-1000 격납 건물의 집중질량모델을 활용하였다. 해당 모델은 Fig. 2와 같이 전체 높이 65.84m, 지반을 포함하여 14개의 노드, 13개의 beam 요소로 이루어져 있으며, 각 요소의 질량, 탄성 계수 등의 상세한 물성은 Ali 등(2017)의 문헌에 기술되어 있다. 이 모델은 노드별로 회전 자유도가 포함되어 있지만, 병진방향의 가속도계를 배치하는 문제이기에 Guyan reduction을 통해 회전 자유도를 제거하였다(Yi et al., 2011). 회전 자유도를 고려하게 되면 병진 자유도와의 상관관계를 고려하는 문제가 되므로 본 연구 목적상 고려하지 않았다. 이후 고유치 해석을 통해 고유진동수와 모드형상, 모드참여질량을 확인하였으며 그 결과는 Table 1과 같다. 산출된 동특성은 한울 5,6호기 최종안전성분석보고서에 제시된 1차 진동수(4.6 Hz) 등 모드 참여율이 주요한 모드들의 고유진동수와 거의 일치하였기에 해석모델이 타당한 것으로 간주하였다.
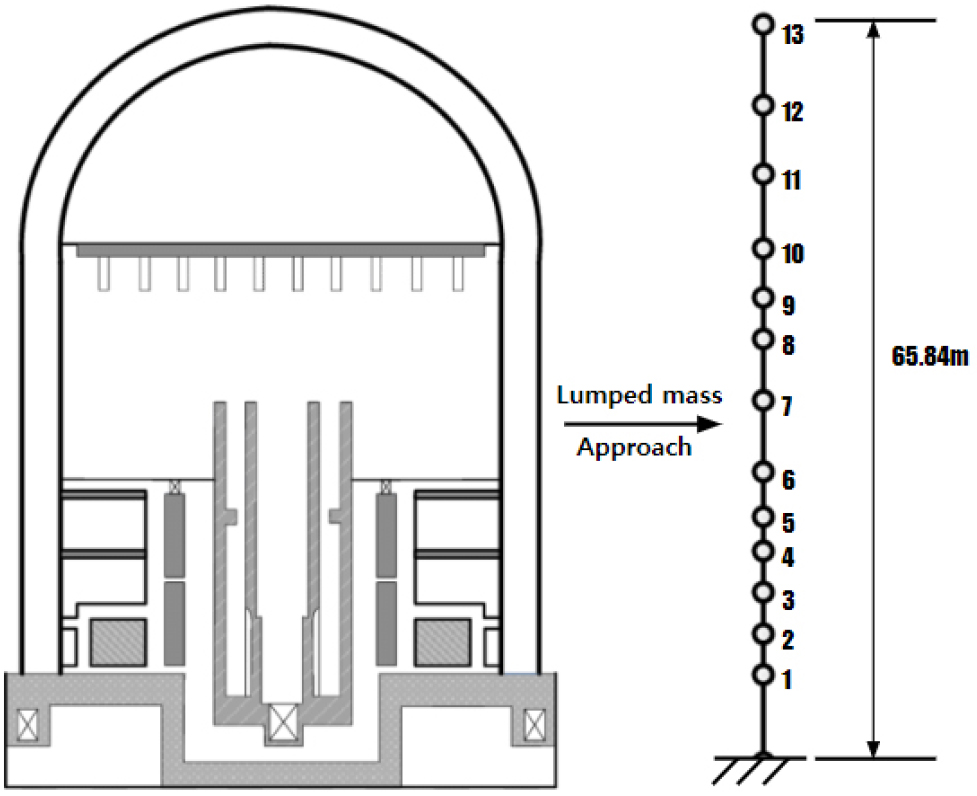
Table 1.
Dynamic parameters of the containment building model
| Mode | Natural freq.(Hz) |
Modal participation mass ratio (each mode / cumulative) |
| 1 | 4.57 | 71.9% / 71.9% |
| 2 | 13.53 | 19.3% / 91.2% |
| 3 | 25.06 | 4.6% / 95.8% |
| 4 | 37.39 | 2.0% / 97.8% |
| 5 | 43.13 | 0.6% / 98.4% |
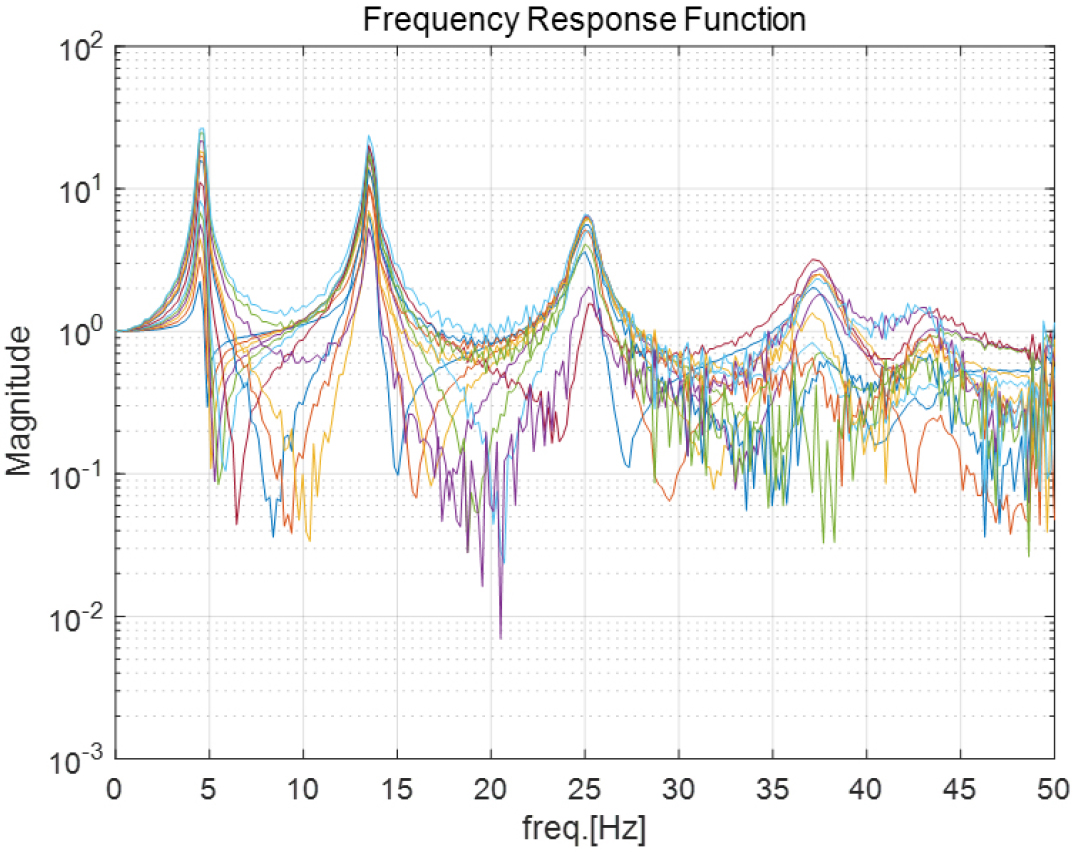
다음으로 해석모델에 입력 지진동을 부여하여 주파수 응답을 관찰하였다. 주파수 응답함수는 Fig. 3와 같으며, Nyquist 주파수인 50Hz 구간 내에서 고유치 해석결과와 같이 5개의 피크(모드)가 형성되었다. 다수 노드의 주파수 응답함수로부터 최적의 동특성을 추출하기 위해서 LSCE(Least-squares complex exponential) 방법을 활용하였으며, 추출된 고유진동수와 모드형상은 고유치 해석결과와 거의 일치하였다. 이로서 입력가진과 해석모델은 최적 센서배치 문제에 활용하기에 적합한 것으로 평가되었다.
3.3 잡음을 고려한 강건한 최적 센서배치
최적 센서배치를 위한 대상 모드는 모드참여질량비를 고려하여 3차 모드(누적 95.8%)까지 활용하였다. 유전 알고리즘의 적합함수는 auto MAC의 비대각선 요소 중 최댓값으로 지정하여 최적화를 수행하였다. 그 결과는 Table 2와 같으며, Fig. 4에 일부 배치안을 도시하였다. 제시된 센서 수별 노드 배치는 auto MAC의 비대각선 요소중 최댓값이 가장 낮은 조합이므로 가장 많은 정보량을 포함한다고 볼 수 있다. 주로 높은 곳의 노드가 먼저 선택되는 경향을 보였는데, 이는 1차 모드가 주요하여 자유단의 응답이 크기 때문인 것으로 판단된다. 센서 수는 2개로는 Fig. 5과 같이 1차와 2차 모드 사이의 상관성이 높았으며, 기준치 0.25를 넘어 모드 식별이 불가하였다. 센서 수 3개부터는 auto MAC 비대각선 요소중 최댓값이 0.01 근처 값으로 기준치를 충분히 충족하였다. 따라서 대상 모드 3개를 고려하기 위해 센서는 적어도 3개가 필요함을 알 수 있었다.
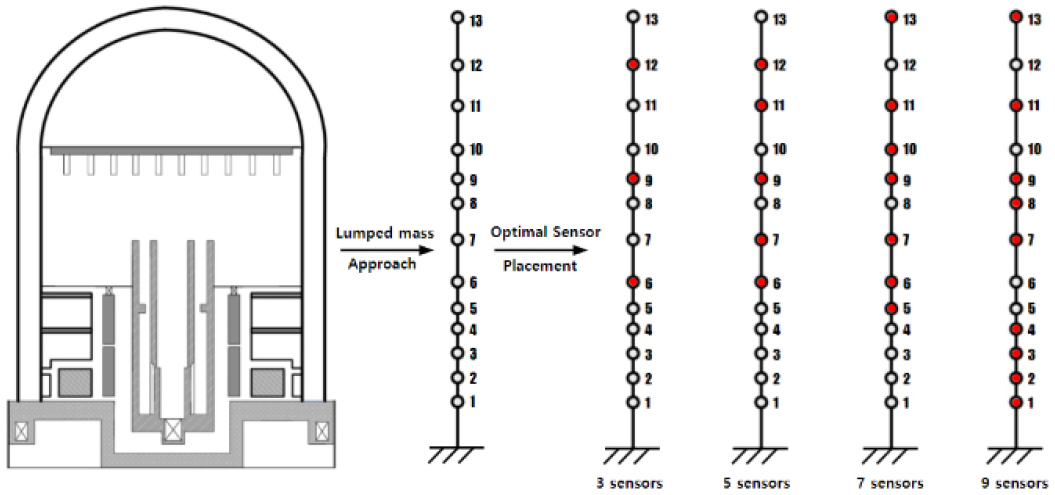
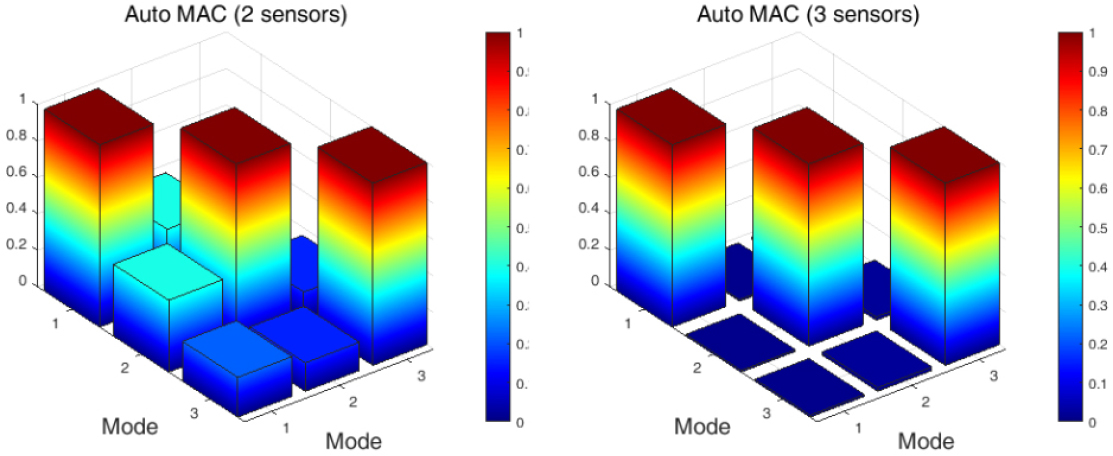
Table 2.
Results of optimal sensor placement for the different sensor numbers
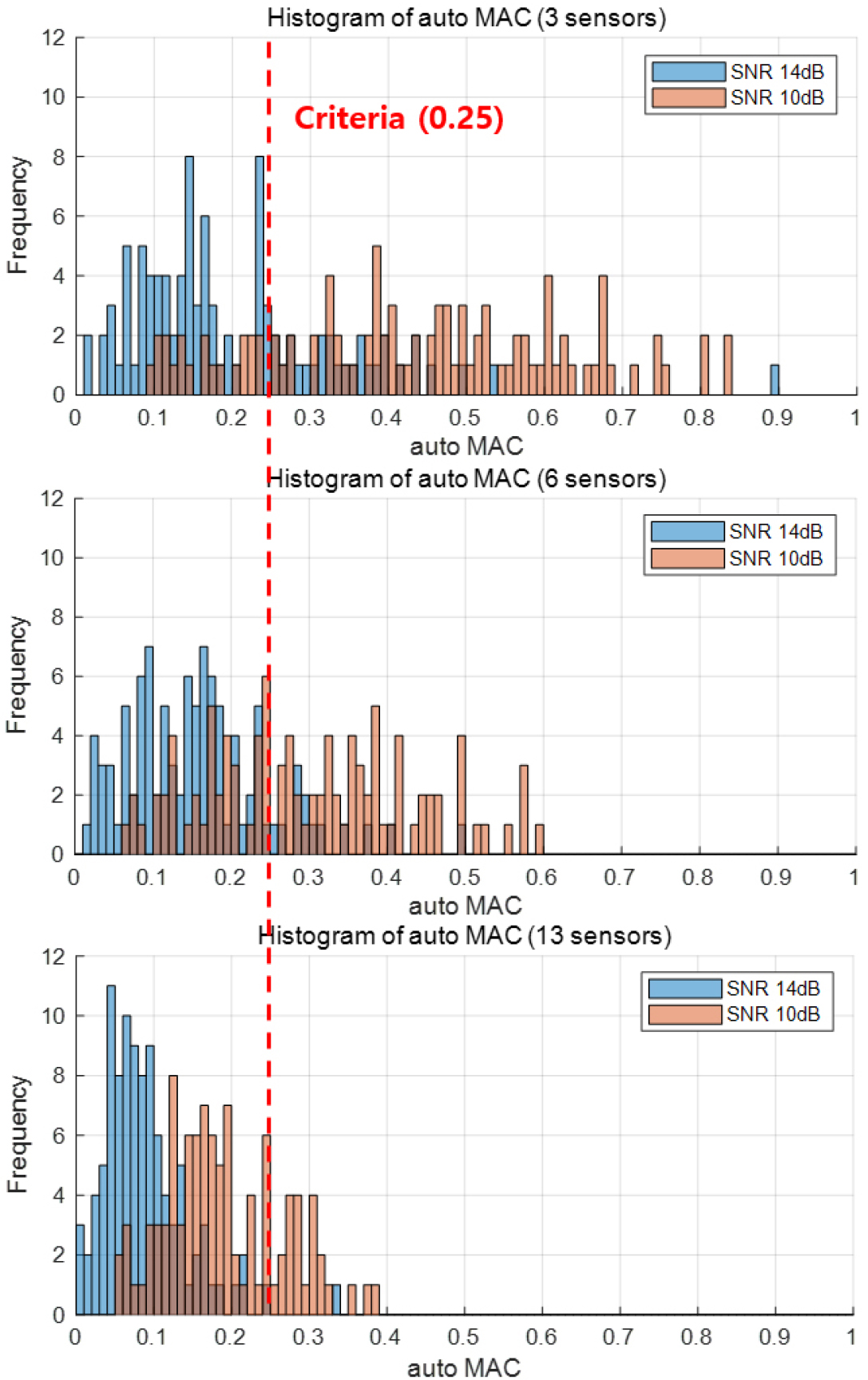
다음으로 잡음을 고려하기 위해 입력과 출력 데이터에 Gaussian white noise를 임의적으로 100회 부여하여 동적응답을 반복적으로 계산하였다. 이때 SNR은 40dB, 20dB, 18dB, 16dB, 14dB, 12dB, 10dB 7가지 경우를 부여하였다. 센서 수는 3개, 6개, 9개, 13개 4가지 경우를 고려하였으며 그 배치는 Table 2의 노드 값과 동일하다. 변동되는 모드형상의 양상을 관찰하기 위해 먼저 auto MAC의 분포를 관찰하였으며, Table 3, 4에 그 평균값과 표준편차를 정리하였다. SNR의 변화에 따른 auto MAC의 평균값을 보면, SNR이 감소하여 잡음이 우세할수록 그 값이 커져서 모드의 독립성이 훼손됨을 알 수 있다. 그리고 센서 수가 증가할수록 auto MAC의 평균값은 감소함을 보였다. 이는 센서 수가 늘어나 정보의 양이 충분할수록 모드의 독립성을 더 확보할 수 있음을 의미한다. Auto MAC의 기준치인 0.25를 경계로 볼 때, 센서 수 3개에서는 14dB까지, 센서 수 6개에서는 12dB까지, 센서 수 9, 13개에서는 SNR 10dB까지 충족하는 것으로 나타났다. Auto MAC의 표준편차 역시 평균값과 비슷한 양상을 보였다. 이는 모드 간의 독립성을 잃을 때 모드형상 신호의 강건도가 동일하게 훼손됨을 의미한다. Table 5는 Auto MAC이 기준치를 통과하는 비율을 정리한 것이다. 기준치의 통과기준을 90%로 볼 때, 센서 수 3, 6개에서는 16dB까지, 9, 13개에서는 14dB까지 강건함을 유지하는 것으로 나타났다. 이는 데이터의 신뢰도를 나타내는 것으로 평균값보다 더 보수적으로 유용하게 활용할 수 있는 지표라고 판단된다. 본 해석조건에서는 평균값이 약 0.1 이하, 표준편차는 약 0.06 이하에서 기준치 통과율 90%를 충족하였다. Fig. 6은 SNR 14dB, 10dB 조건에서 센서 수(3, 6, 13개)별 auto MAC의 히스토그램을 표현한 것이다. SNR이 양호한 조건에서는 센서 수의 차이가 강건도에 큰 영향을 미치지 않았지만, SNR이 불량하면 센서 수의 차이에 따라 표준편차가 커지며 강건도의 차이가 큰 것을 확인할 수 있었다. 따라서 매우 불량한 SNR 조건까지 감수해야 할 상황이라면 센서 수를 더욱 증가시켜야 할 것이다.
Table 3.
Mean value of auto MAC for the different sensor numbers and SNR
Table 4.
Standard deviation of auto MAC for the different sensor numbers and SNR
Table 5.
Passing rate of the criteria(auto MAC < 0.25) for the different sensor numbers and SNR
|
SNR (dB) | Sensor numbers | |||
| 3 | 6 | 9 | 13 | |
| 40 | 100% | 100% | 100% | 100% |
| 20 | 100% | 100% | 100% | 100% |
| 18 | 99% | 100% | 100% | 100% |
| 16 | 96% | 98% | 100% | 100% |
| 14 | 72% | 84% | 98% | 100% |
| 12 | 43% | 72% | 85% | 86% |
| 10 | 23% | 38% | 55% | 77% |
지금까지 auto MAC을 통해 SNR과 센서 수에 따른 강건도를 평가하여 최적 센서배치를 수행하는 방법을 알아보았다. 그러나 이 방법은 고려하는 대상 모드 전체의 강건도를 일괄적으로 평가하기에 적합하고 모드별 잡음 영향을 개별로 분석하기에는 제한된다. 따라서 고유치 해석으로 산출한 모드형상 매트릭스와 입력과 출력에 잡음을 부여하여 추출된 모드형상 매트릭스의 cross MAC을 계산하여 모드별로 그 일치성을 관찰하였다. 그 결과, 1, 2차 모드의 cross MAC 평균값은 대부분 1에 수렴하였으며, 기준치(0.8) 통과율이 모든 조건에서 100%를 보였다. 즉, 모드참여질량이 높은(1차 모드 : 71.9%, 2차 모드 : 19.3%) 모드에서는 SNR이 10dB 수준으로 불량하여도 모드를 식별하는데 제한이 없음을 보여주었다. 따라서 auto MAC에서 기준치 통과를 하지 못한 데이터는 모드참여질량이 적은 3차 모드(4.6%)로부터 기인하였다는 것을 알 수 있다. 3차 모드 cross MAC의 평균값과 표준편차는 Table 6, 7에, 기준치 통과율은 Table 8에 정리하였다. SNR이 작아져 잡음이 우세할수록 그 평균값은 감소하였고, 표준편차는 증가하는 경향을 보였다. 이는 auto MAC의 결과와 같이 SNR이 작을수록 모드 추출 신뢰성이 저하하는 것을 보여준다. 이는 Table 8에서 SNR이 증가함에 따라 기준치 통과율이 감소하는 결과를 통해서도 유추할 수 있는 사실이다.
Table 6.
Mean value of cross MAC(Mode 3) for the different sensor numbers and SNR
Table 7.
Standard deviation of cross MAC(Mode 3) for the different sensor numbers and SNR
Table 8.
Passing rate of the criteria(cross MAC > 0.8) for the different sensor numbers and SNR
|
SNR (dB) | Sensor numbers | |||
| 3 | 6 | 9 | 13 | |
| 40 | 100% | 100% | 100% | 100% |
| 20 | 100% | 100% | 100% | 100% |
| 18 | 99% | 93% | 100% | 100% |
| 16 | 98% | 60% | 93% | 92% |
| 14 | 64% | 21% | 33% | 34% |
| 12 | 31% | 3% | 6% | 1% |
| 10 | 14% | 1% | 0% | 0% |
그런데 SNR이 작아져 잡음이 심할수록 센서 수에 증가함에 따라 cross MAC 평균 값과 통과율이 오히려 감소하는 추세를 보였다. 센서 수가 6개인 경우에는 Table 2와 같이 다른 배치에 비해 모드 분별력이 저조하여 cross MAC이 다소 급격히 작아졌지만, 나머지 경우는 전체적으로 센서 수 증가에 따라 cross MAC이 작아졌다. 이는 센서 수가 증가할수록 정보의 양이 늘어나서 모드 정보를 더 정확히 추출되야 하는 논리와는 상반되는 결과이다. 그럼에도 센서 수가 증가함에 따라 cross MAC 표준편차는 작아지는 추세이므로, 신호의 강건도는 높아진다고 볼 수 있다. 이런 모순적 결과는 데이터의 차원이 커질수록 임의적인 벡터들의 내적은 점차적으로 직교성을 띄게 되는 수학적인 이유에서 기인하는 것으로 보인다(Makey et al., 2019). 이 현상은 차원이 커짐에 따라 임의벡터의 내적이 반비례하면서 작아지기 때문에 특히 본 연구의 경우처럼 센서 수가 적은 경우에 더욱 그 차이가 두드러질 것이다. 반대로 센서 수가 많은 범위에서 최적 배치를 결정하는 경우라면 이 문제는 크게 발생되지 않을 것으로 생각된다. 만약 본 연구의 결과처럼 센서 수가 많아질수록 cross MAC 값이 작아지는 문제가 발생한다면, 보간법 등의 방법을 통해 같은 데이터를 같은 차원으로 균등하게 조정하는 전처리를 거치면 바람직한 최적 센서배치 해석이 이루어질 것으로 보인다.
SNR과 센서 수에 따른 모드형상을 관찰하기 위해 센서 3개, 13개의 경우 SNR 20dB, 10dB에 대한 모드형상 분포를 Fig. 7, 8, 9, 10에 나타내었다. 이때, 공통 노드인 12번 노드를 크기 1로 정규화하였다. 공통적으로 모드 기여도가 높은 저차 모드일수록 잡음에 대하여 강건한 경향을 보였으며, 잡음이 심해질수록 고차 모드에서 변동성이 심해졌다. 센서 수의 증가에 따른 강건도의 차이는 육안으로 식별하기 어려워서 공통 노드인 9번 노드의 표준편차를 Table 9에 정리하였다. 모드 차수가 높아질수록 공통적으로 표준편차가 증가하는 경향을 보였으며, 특히 SNR이 낮을수록 그 차이가 심해졌다. 또한 센서 수가 많은 경우에서 동일 노드 모드형상의 표준편차가 더 작은 값을 보이며 강건한 결과를 나타내었다. 이로서 앞서 센서 수가 증가할수록 cross MAC이 감소하는 현상이 강건도가 낮아짐을 의미하는 것이 아님을 검증할 수 있었다. 이처럼 모드형상을 정규화 하여 노드별로 그 강건도를 비교분석한다면 더욱 세밀한 강건도 평가가 가능할 것으로 생각된다.
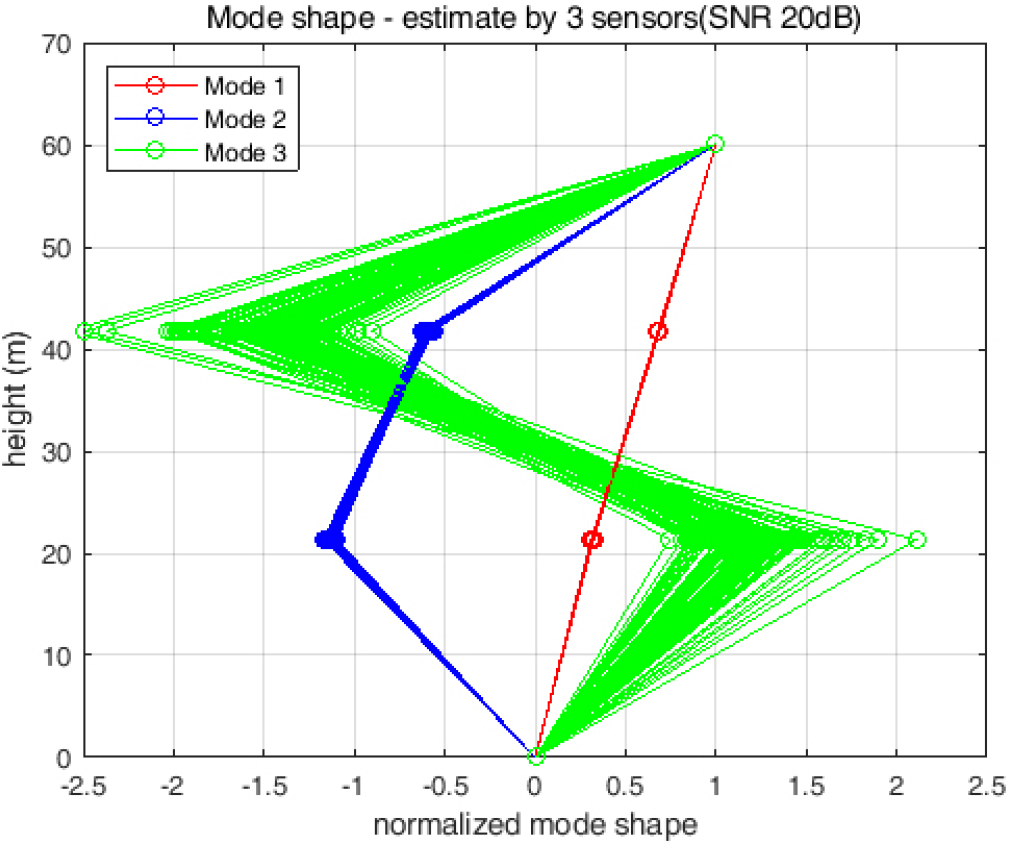
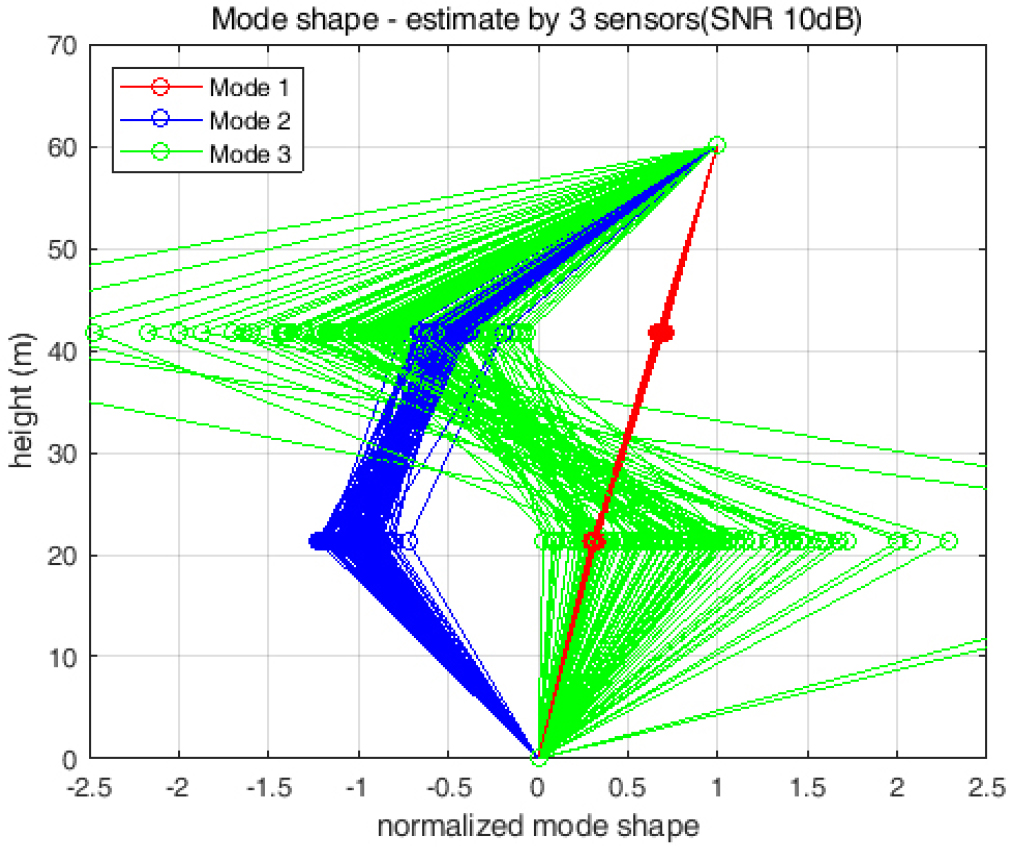
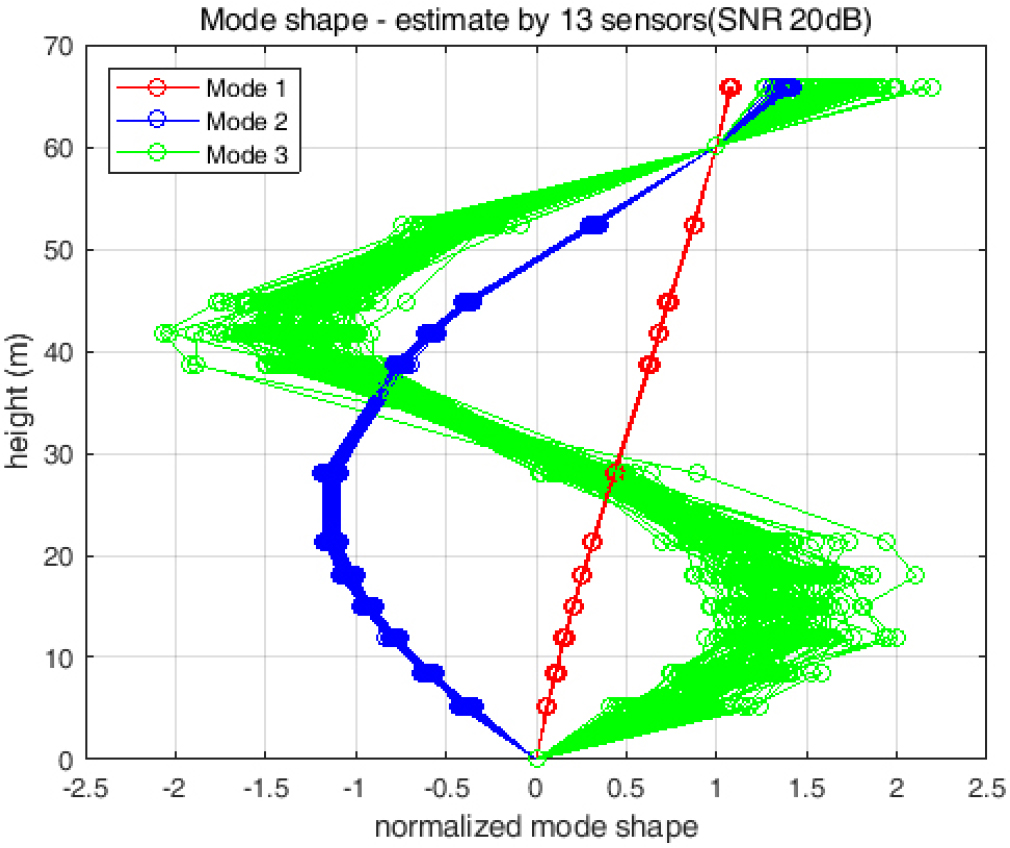
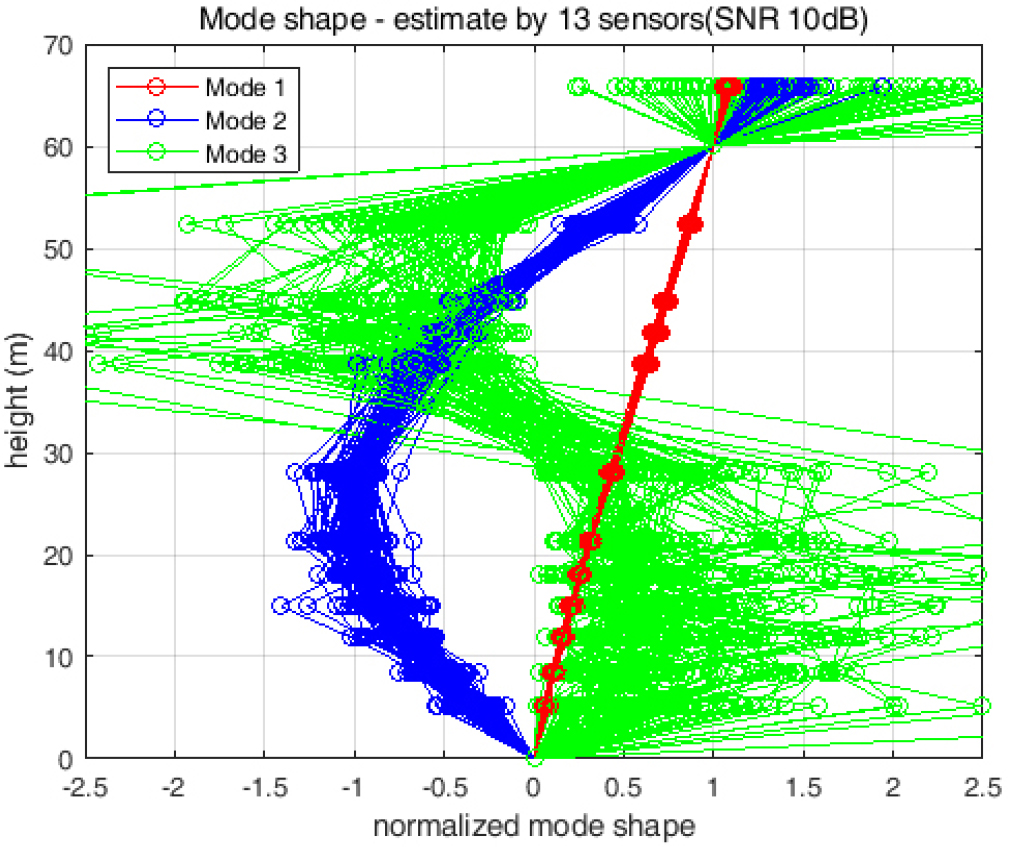
Table 9.
Standard deviation of mode shape amplitude(node 9) for the different sensor numbers and SNR
|
SNR (dB) | Sensor numbers | |||||
| 3 | 13 | |||||
| Mode1 | Mode2 | Mode3 | Mode1 | Mode2 | Mode3 | |
| 20 | 0.0028 | 0.0145 | 0.2923 | 0.0036 | 0.0173 | 0.2218 |
| 10 | 0.0083 | 0.0946 | 0.6681 | 0.0103 | 0.0734 | 0.5640 |
지금까지의 잡음을 고려하여 강건한 최적 센서배치를 수행하는 방법론에 대해 살펴보았다. 순서대로 정리하자면 auto MAC을 통해 센서 수별 최적 센서배치를 도출하고, auto MAC의 분포를 통해 강건도를 평가하였다. 추가적으로 모드별 잡음 영향을 분석하기 위해서는 cross MAC의 분포를 분석하였다. 이 때, 임의적인 벡터는 차원이 커질수록 직교성을 띄어 센서 수가 많아질수록 cross MAC이 작아지는 현상이 발생할 수 있다. 이 해결방안으로는 보간법을 통해 데이터를 같은 차원으로 통일하는 전처리를 수행하거나, 공통 노드의 모드형상 편차를 분석함으로써 그 강건도를 평가할 수 있다.
4. 요약 및 결론
본 연구에서는 원전 격납 건물의 실시간 모니터링 및 동특성 추출을 위해 잡음의 수준과 모드 기여도를 고려한 최적 센서배치 방안을 제시하였다. 해석모델로서 OPR-1000 격납 건물의 집중질량 모델을 활용하였으며, 지진동은 USNRC RG 1.60의 응답스펙트럼을 활용하였다. 최적 센서배치를 도출하기 위해서 MAC과 유전 알고리즘을 활용하였으며 auto MAC, cross MAC, 노드별 모드형상 분포를 분석함으로써 잡음에 강건한 최적 센서배치를 수행하는 방법론을 제안하였다. 주요한 결론과 향후 연구방향은 다음과 같이 도출하였다
Auto MAC은 다른 모드와의 선형 독립성을 비대각선 요소로써 평가할 수 있어 최적화의 비용함수로 유용하게 활용된다. 또한 잡음이 부여되었을 때 그 분포를 관찰함으로써 센서배치의 잡음에 대한 강건도를 정량적으로 분석할 수 있다. 활용할 수 있는 지표로 평균, 표준편차, 기준치 통과율을 분석하였으며 서로 같은 경향을 보이기 때문에 상호 보완적인 지표로 활용할 수 있다.
1) Auto MAC은 대상 모드 전체의 강건도를 일괄적으로 평가하기에는 적합하지만 모드별 잡음 영향을 개별로 분석하기에는 제한된다. 이에 대한 대안으로 고유치 해석 결과와 신호로 추출한 모드형상 간의 cross MAC을 분석하여 모드별 강건도를 분석할 수 있다.
2) Cross MAC은 잡음의 수준에 따라 모드별 신뢰도를 분석할 수 있지만, 센서 수가 증가함에 따라 오히려 cross MAC이 줄어드는 현상이 나타날 수 있다. 이는 데이터의 차원이 커질수록 임의적인 벡터들의 내적이 점차적으로 직교성을 띄게 되는 수학적인 이유에서 기인한다. 이를 해결하기 위해서는 보간법 등을 통해 데이터의 차원을 통일하여 분석하는 방법론에 대한 추후 연구가 필요해 보이며, 본 연구에서는 센서 수가 다른 경우 공통의 노드에 대한 모드형상 크기를 정규화하고 표준편차를 비교함으로써 강건도를 평가하는 대안을 제시하였다.
