

1. 서 론
2. 주행안전성 및 승차감 예측시스템 개발
2.1 주행안전성 및 승차감 검토 절차
2.2 딥러닝 알고리즘
2.3 딥러닝 기반 주행안전성 및 승차감 예측 시스템 구축
3. 단경간 단순교 철도 교량에 대한 예제
4. 결 론
1. 서 론
철도 교량은 활하중의 비중이 크며, 일정한 축거를 갖는 다수의 차량이 연속적으로 교량을 통과하는 연행하중 작용에 의한 공진 발생 위험이 존재하므로 안전성 및 승차감 확보를 위한 동적 거동에 대한 검토가 필요하다(KRRI, 2008). 철도설계기준(KRNA, 2013)은 설계속도 200km/h 이상인 고속철도 교량에 대하여 주행안전성 및 승차감을 검토하도록 하고 있다. 설계속도 200km/h 이하의 일반철도 교량도 첫 번째 휨 고유진동수가 3.0Hz 이하이고, KTX, 새마을 열차, 무궁화 열차, 틸팅열차가 최대 운행 속도 200km/h 이하로 운행할 경우와 화물열차가 최대운행 속도 150km/h 이하로 운행할 경우 동적 거동에 대한 검토를 수행하도록 하고 있다.
이러한 주행안전성 및 승차감 검토 과정은 설계 시 교량 주요 부재의 단면 결정을 위하여 수행되는 일반적인 수치해석에 비해서 많은 시간이 소요된다. 철도설계기준에 제시된 절차는 대상 철도 교량에 실제 운행될 열차의 종류별로 각각 임계속도를 포함하여 설계속도의 1.1배까지 10km/h간격으로 동적해석을 수행하도록 하고 있다. 설계속도 300km/h의 고속열차만 운행하는 여객전용선의 경우라도 총 33번의 동적해석을 수행해야 한다. 이러한 이유로 주행안전성 및 승차감 검토는 교량의 주요 설계가 모두 완료된 이후 기준 만족 여부를 확인하는 수준에 그치고 있으며, 안전성과 승차감을 높이기 위한 설계가 수행되지 못하고 있다.
딥러닝 알고리즘은 AI알고리즘 중에서도 컴퓨터의 병렬연산능력 향상에 힘입어 강력한 경쟁력을 가지게 된 비모델 기반 알고리즘 중 하나이다. 비모델 기반 알고리즘은 주어진 문제 모델에 대해 수학적인 관계를 모르더라도 문제 모델의 반복 수행이 가능한 경우 충분한 데이터를 사전에 축적하여 학습해 두면 이후 문제 모델을 다시 풀이할 필요없이 인공신경망이 해당 과정을 대체할 수 있다는 장점이 있다.
최근 철도 분야에서도 딥러닝 알고리즘을 활용하기 위한 연구가 활발히 진행되고 있다. Yang 등(2021)은 궤도를 주행하는 검측 차량으로부터 수집되는 가속도 데이터를 활용하여 딥러닝 모델을 구축 후, 가속도 데이터만으로 레일 이음매의 위치를 정확히 인식할 수 있는 시스템을 제안한 바 있다. Lee 등(2021)은 HEMU-430X에 변위계, 가속도계를 설치하여 실시간으로 계측데이터를 수집 가능하게 하였고, 실시간 데이터를 학습하는데 적합하도록 RNN(Recurrent Neural Network) 및 DNN(Deep Neural Network) 구조를 결합한 하이브리드형 예측 시스템을 개발하였다. 그러나 현재까지 교량 상을 주행하는 열차의 주행안전성 및 승차감을 예측하기 위한 딥러닝 알고리즘에 대한 연구는 수행되지 않은 상황이다.
주행안전성 및 승차감 산정 절차는 입력파라미터와 출력파라미터 간 상관성이 존재하나(Hwang et al., 2016), 구조물의 정적특성만이 아닌 동적특성을 추가적으로 고려해야 하고(Kim & Kwak, 2012), 수많은 동적해석이 필요하며 기준값을 만족하지 않을 경우 동적해석을 반복해야 하는 등 복잡한 연산 과정이 필요하여 명확한 수식화가 어렵다는 특징이 있다. 딥러닝 알고리즘은 이와 같이 직관적으로 해결하기 힘든 문제에 대해서도 대응 가능하다는 특징이 있다(Lazarevska et al., 2014).
이 연구에서는 딥러닝 알고리즘을 이용하여 주행안전성 및 승차감을 예측할 수 있는 방법을 개발하였다. 딥러닝 알고리즘이 충분한 성능을 발휘하기 위해서는 양질의 데이터를 확보할 수단이 함께 고려될 필요가 있다. 이 연구에서는 주행안전성 및 승차감 해석 프로세스를 모듈화하여 자동화시켰고, 이를 통해 확보한 입력데이터 및 출력데이터를 학습데이터 활용하여 딥러닝 알고리즘을 학습시켰다. 구축이 완료된 딥러닝 기반 예측 모델을 활용할 경우 동적해석을 수행하지 않고도 주행 안전성 및 승차감을 산정할 수 있으므로 철도교량에 대한 설계 절차를 간소화할 수 있으며, 철도 교량의 주행 안전성 및 승차감을 최적화할 수 있는 설계가 가능하다.
2. 주행안전성 및 승차감 예측시스템 개발
2.1 주행안전성 및 승차감 검토 절차
KR C-08070은 주행안전성 및 승차감 검토 시 해석 절차 및 방법의 차이에 따른 검토 상의 오류를 방지하기 위하여 다음과 같은 조건들을 고려하여 주행열차하중에 대한 동적해석을 수행하도록 하고 있다. 주행열차하중에 대한 철도 교량의 동적해석은 시간이력해석 또는 모드중첩법을 적용해야 하며, 열차가 교량 시점부터 출발하여 교량을 완전히 통과할 때까지의 과정을 포함하여 해석을 수행하도록 하고 있다. 주행열차하중은 기본적으로 실열차하중을 적용하여야 하며, 이때 열차속도는 설계속도의 1.1배까지 10km/h 간격으로 수행한다. 또한 임계속도를 미리 산정하여 이 속도에 대한 해석도 반드시 포함하여야 한다. 임계속도는 식 (1)을 이용하여 산정할 수 있다.
여기서, 𝜔1은 교량의 첫 번째 휨 고유진동수이며, 는 열차의 지배적 타격 간격(열차 간 중심간격)이다.
교량의 모델링은 연속교의 경우 전체 경간 구성을 모델링하여야 하며, 단순교가 병행하여 구성될 경우 각 지간이 동일하다면 단순교 1개에 대해서만 해석을 수행하여도 된다. 교량의 모델링은 가속도 제한값을 검토하는 위치에서 직접적인 응답을 얻을 수 있으며 교량 단면 내에서 변형이 고려될 수 있도록 공간 뼈대요소 이상의 모델링 요소를 적용하여야 한다. 교량의 단면특성치 및 물성치의 경우 정적설계에서 적용한 값을 사용하되 동적해석 시 필요한 감쇠비 등을 추가적으로 적용하여야 한다.
철도교량에 대한 동적해석을 통하여 산정된 동적응답은 KR C-08070에 제시된 주행안전성 및 승차감 기준치를 만족하는지 여부를 검토하여야 한다. 주행안전성의 경우에는 교량의 연직가속도, 연직처짐 및 면틀림에 대해 검토하여야 하며, 승차감은 연직처짐에 대해 검토하여야 한다. 주행안전성 및 승차감의 검토 기준은 Table 1과 같다. 참고로 Table 1의 승차감 기준은 열차 설계속도와 교량 경간장별로 다른 값을 갖는다.
Table 1.
Review criteria of running safety and ride comfort
| running safety | ride comfort | |
| vertical acceleration |
ballast track : 0.35g concrete track : 0.5g | - |
| vertical deflection | ||
| slab twist | 1.2~3.0mm/3m | - |
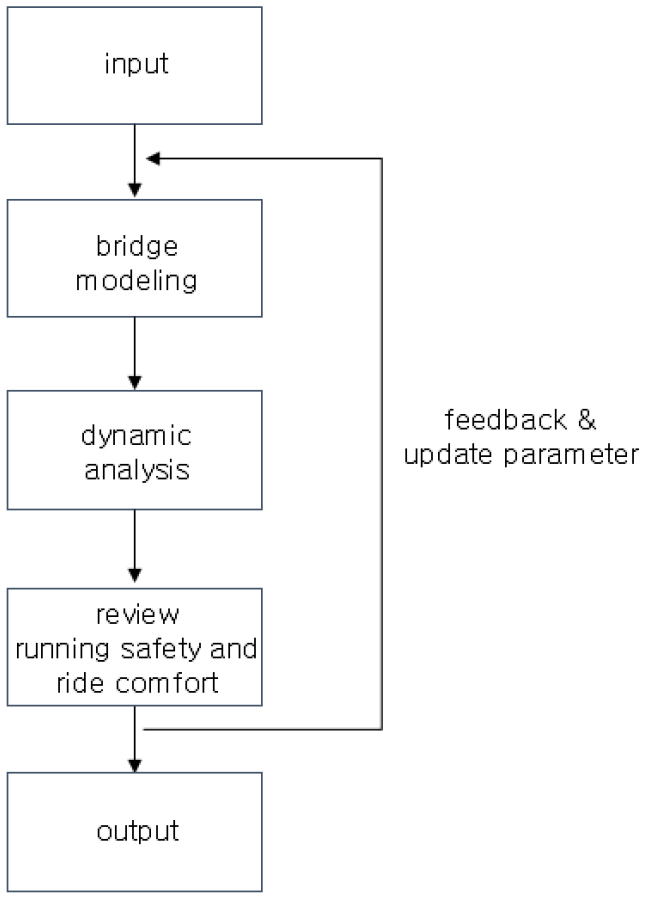
철도교량의 주행안전성 및 승차감 검토 절차는 Fig. 1과 같이 도식화할 수 있다.
2.2 딥러닝 알고리즘
최근 인공지능이 이슈가 되면서 다양한 공학 분야에서 인공지능에 대한 연구가 활발히 이루어지고 있다. 그중 대표적인 인공지능 기법 중 하나인 딥러닝 알고리즘은 특정 데이터 집단을 입력하면 입력층과 출력층 사이에 여러 개의 은닉층(hidden layer)을 구성하여 데이터를 학습하고 집단이 공통적으로 가지고 있는 통계적 특징을 계산하여 데이터를 분류하거나 회귀하는 기술이다. 특히 병렬처리에 적합한 구조라는 특징이 있어 최근 GPU를 활용한 병렬처리 기술이 발전함과 더불어 많은 양의 데이터를 효과적으로 학습하고 분류하는 것이 가능하게 되었다. 딥러닝 알고리즘의 기본 구조는 Fig. 2와 같다.
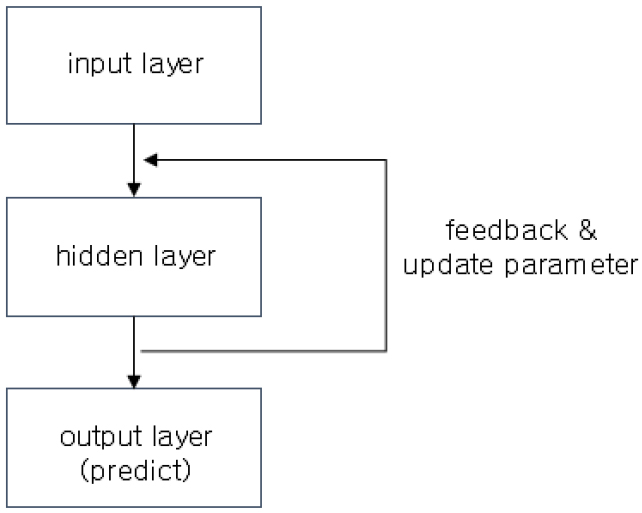
딥러닝 알고리즘은 인공신경망이라는 계층화된 알고리즘을 사용하여 입력데이터와 출력데이터 간 관계성을 가장 잘 표현할 수 있는 형태를 반복적인 학습을 통해 찾아간다. 이때, 학습이란 은닉층 내 하이퍼 파라미터(hyper parameter)를 갱신하는 과정으로 딥러닝 알고리즘은 여러 층의 은닉층을 사용하므로 입력과 출력 간 비선형적인 관계를 갖는 경우도 적용이 가능하다는 특징이 있다.
2.3 딥러닝 기반 주행안전성 및 승차감 예측 시스템 구축
이 연구에서는 철도 교량의 주행안전성 및 승차감 예측 시스템을 Fig. 3과 같이 구축하였다. 작성된 시스템은 Running Safety and Ride Comfort Analysis, Database, Learning System, Deep-learning-based Prediction System의 4개 단계로 구성된다. Running Safety and Ride Comfort Analysis 단계에서는 수치해석 과정을 포함한 종래의 주행안전성 및 승차감 산정 절차를 수행한다.
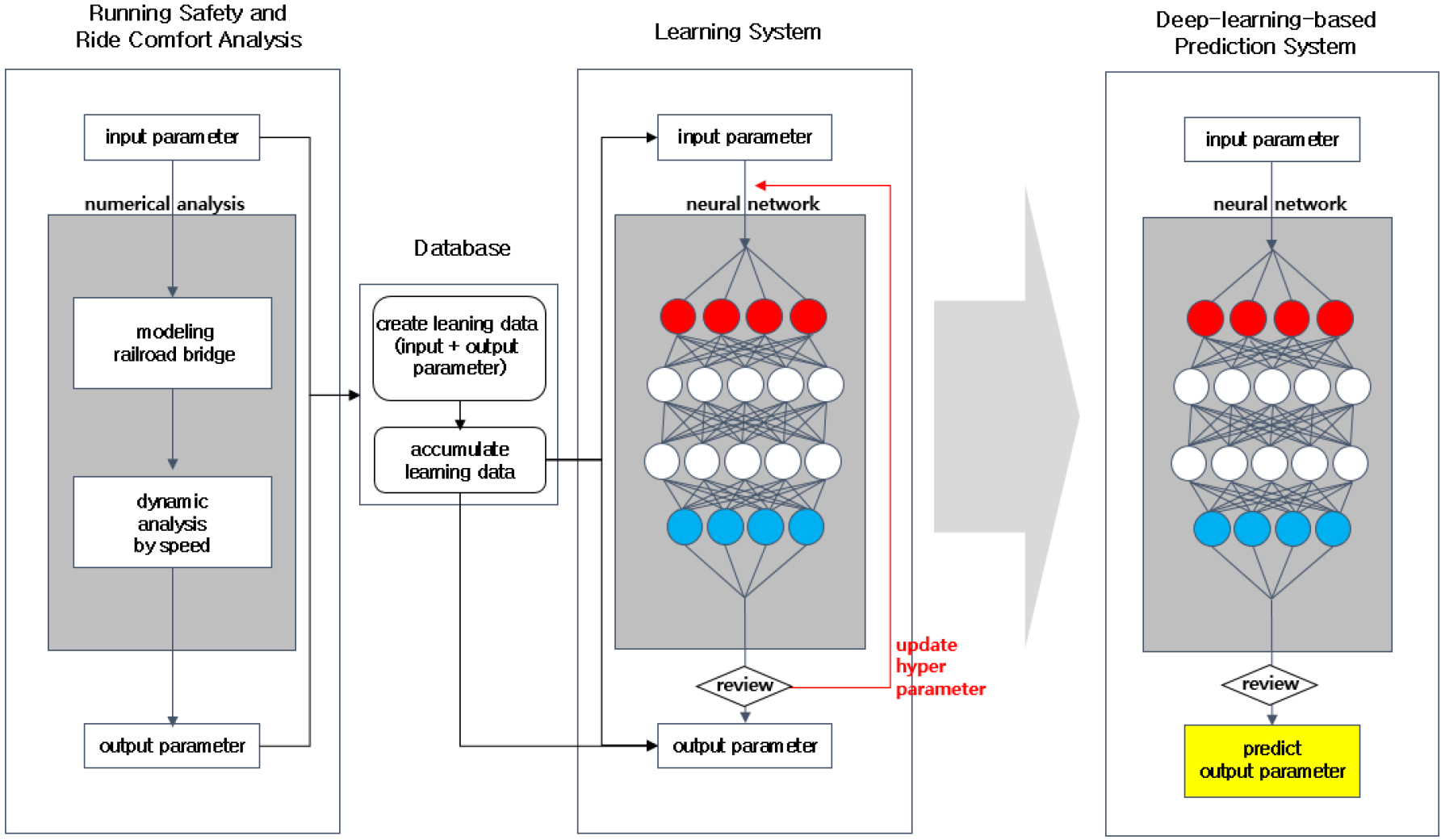
딥러닝 알고리즘의 학습은 경우에 따라 수천 개 내지는 수만 개의 학습데이터를 필요로 하는데 주행안전성 및 승차감 산정을 위해서는 단 하나의 철도 교량일지라도 열차의 종류별, 속도별로 해석이 수행되어야 하고 다양한 열차가 통과하는 교량의 경우 수백 번의 해석이 필요하므로 이를 직접 수행할 경우 학습데이터 확보에 어려움이 있을 수 있다. 따라서, 본 연구에서는 충분한 양의 학습데이터 확보를 위해 상용 유한요소해석 프로그램 ABAQUS를 이용하여 수치해석을 자동 수행할 수 있는 프로그램을 개발하였다.
개발된 프로그램은 첫 번째 단계인 Running Safety and Ride Comfort Analysis에서 열차 속도별로 철도 교량에 대한 이동하중해석을 수행한 뒤 출력 파라미터로서 주행안전성 및 승차감 산정을 위해 필요한 동적 응답인 교량의 연직가속도, 연직처짐 등을 자동출력하도록 작성하였다. 산정된 결과는 다음 단계인 Database 단계에서 입력 파라미터와 함께 묶어 학습데이터로서 데이터베이스 형태로 축적하도록 하였다. 세 번째 단계인 Learning System에서는 이전 단계에서 구성된 학습데이터를 활용하여 인공신경망을 학습하는 단계이다. 이 단계에서는 주어진 입력 파라미터와 출력 파라미터에 대해 서로 간 관계를 가장 잘 계산할 수 있는 최적의 하이퍼 파라미터를 찾기 위해 반복적인 피드백 과정 및 파라미터 갱신과정을 수행하고 신경망을 완성시킨다. 학습 결과 완성된 신경망은 네 번째 단계인 Deep-learning-based Prediction System 단계에서 활용된다. 완성된 신경망은 첫 번째 단계인 Running Safety and Ride Comfort Analysis 단계 중 Numerical Analysis를 대체한다. 예측 시스템은 입력 파라미터를 입력하면 별도의 수치해석 과정 없이 수치해석을 수행했을 때의 출력 파라미터의 예측 결과를 제공하도록 하였다.
3. 단경간 단순교 철도 교량에 대한 예제
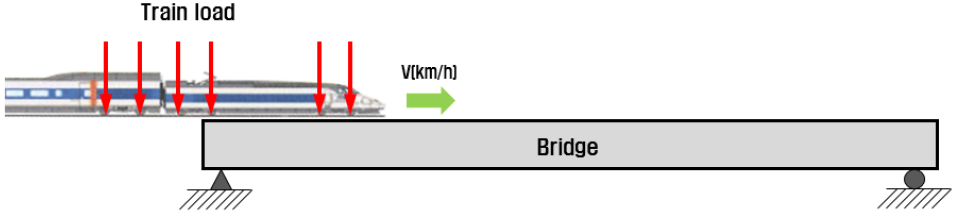
개발된 예측 시스템의 검증을 위해 단경간 단순교의 철도 교량을 대상으로 하여 주행안전성 및 승차감 예측을 수행하였다. Fig. 4는 해석에 사용된 교량 및 열차 하중에 대한 개요도이다. 열차 하중은 고속열차는 아니지만, 고속전용선이 아닌 경우 교량을 통과하는 모든 열차 종류별 검토가 수행되어야 하는 점과 학습에 필요한 데이터 생성 시간을 줄일 수 있는 점을 고려하여 무궁화호를 적용하였으며, 정해진 속도로 통과하는 이동하중으로 모델링하였다. 참고로 무궁화호는 동력차량의 최대 축하중이 22ton으로 KTX 등 고속열차 차량 주행 시에 비해 상대적으로 큰 교량의 응답을 얻을 수 있으며, 열차 길이가 203m로 388m인 KTX열차에 비해 짧아 단일 해석 소요 시간을 절반 가량으로 경감할 수 있고, 최대 운행 속도가 200km/h 이하로 총 해석 횟수가 적어 KTX 적용 시 보다 학습데이터 생성 시간을 상당히 절감할 수 있었다.
교량에 대한 해석모델은 ABAQUS를 이용하여 작성하였으며, Beam 요소(B31)를 이용하여 모델링하였다. 해석모델의 절점수와 요소의 길이는 임의로 입력되는 경간 길이에 따라 자동으로 변경되게끔 하였으며, element 길이는 해석 정확도를 위해 최대 0.50m가 넘지 않도록 제한하였다. 지점 조건은 가장 기본인 형태인 단순지지로 설정하였다. 교량에 대한 자동 해석 시스템은 학습 데이터베이스 생성 자동화를 위해 단면 제원, 경간 길이를 비롯한 각종 설계입력 값들을 임의로 자동 입력 및 자동 변경이 가능하도록 설계하였다. 동적해석은 직접적분법으로 진행하였고, 열차의 속도 및 길이와 교량 경간을 고려하여 열차가 교량을 완전히 통과할 때까지 해석을 수행하였다. 각 해석 시의 시간 간격은 절점과 절점사이 3회 이상 각 축이 재하될 수 있도록 KR C-08070에 제시된 조건에 맞게 설정하였다.
먼저 Running Safety and Ride Comfort Analysis 및 Database 구축 단계를 통해 학습데이터 8,000개와 검증용 데이터 2,000개를 생성하였다. 학습데이터는 입력 파라미터와 출력 파라미터를 결합한 형태로 Table 2와 같이 구성되었다.
Table 2.
Learning data set
| parameter | |
| input parameter | train velocity |
| bridge density | |
| bridge elasticity | |
| bridge width | |
| bridge deck height | |
| bridge length | |
| output parameter | vertical acceleration |
| vertical deflection |
입력 파라미터는 운행 열차의 속도(train velocity), 교량 재료의 밀도(bridge density), 탄성계수(bridge elasticity), 교량 폭(bridge width), 교량 상판 높이(bridge deck height) 및 교량 길이(bridge length)로 구성하였다. 교량의 밀도는 단위 길이당 질량을 반영하기 위한 값이고, 탄성계수는 보강재 등에 의한 교량의 전체적인 강성 증가량을 반영하기 위한 파라미터이다.
학습데이터 생성은 철도교에서 주로 적용되는 50m 이하 경간장의 교량의 설계정보들을 참고하여 입력 파라미터의 범위를 임의로 선정하였고, 해당 범위에 대한 균등분포의 랜덤 데이터를 생성하였다. 열차 속도는 10km/h 간격으로 랜덤한 데이터를 생성하였다. 각 입력 파라미터의 데이터 범위는 Table 3과 같다. 딥러닝 알고리즘 학습 시 국소값(Local minimum)에 수렴하는 것을 방지하기 위해 입력 파라미터의 데이터 범위를 유한요소해석 중 발산 등의 오류가 발생하지 않을 정도의 한도 내에서 가능한 한 넓게 설정하였다.
Table 3.
Input parameter data range
| input parameter | unit | data range |
| train velocity | km/h | 110~200 |
| bridge density | kg/m3 | 1,175~4,700 |
| bridge elasticity | MPa | 14,250~57,000 |
| bridge width | m | 1~5 |
| bridge deck height | m | 1~5 |
| bridge length | m | 10~50 |
출력 파라미터는 상판 연직가속도(vertical acceleration), 상판 연직변위(vertical deflection)으로 구성하였다. 이는 철도 교량의 주행안전성 및 승차감 평가 절차 시 검토되어야 하는 동적 응답 중 각각 교량의 연직가속도의 최대값, 교량의 연직처짐의 최대값을 의미한다. 참고로 이 예제에 적용된 단경간 단순교는 직선교로 궤도 비틀림값이 거의 발생하지 않으므로 출력 파라미터에서는 궤도 비틀림을 고려하지 않았다.
Running Safety and Ride Comfort Analysis 단계에서는 수행되는 주행안전성 및 승차감 평가를 직접 수행하여 학습에 필요한 입력 파라미터-출력 파라미터로 구성된 데이터셋의 집단을 자동 생성한다. 출력파라미터를 구성하는 상판 연직변위, 상판 수직가속도에 대한 각각의 평가 결과 값은 각각 검토 기준치 이하를 만족할 경우 1의 값으로 레이블링되고, 기준치를 초과할 경우 0의 값으로 레이블링되도록 하였다.
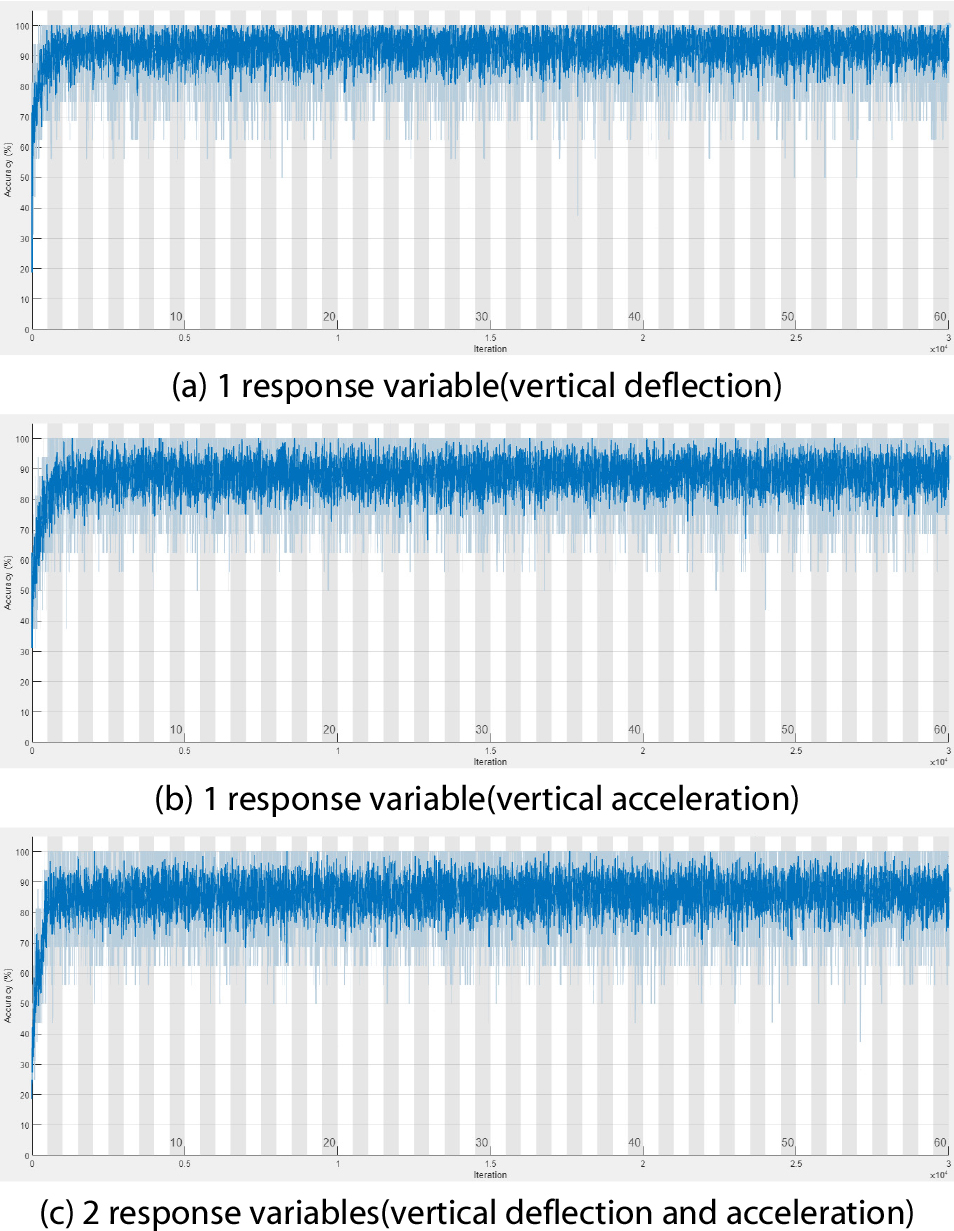
Learning System 단계에서는 생성된 학습데이터를 활용하여 딥러닝 알고리즘의 학습을 수행하고, 신경망 내 하이퍼파라미터의 최적화를 수행한다. 본 연구에서는 각 응답변수별 예측성능을 확인하기 위해 동일한 학습데이터 집단에 대해 동일한 조건으로 (1) 상판 연직가속도를 응답변수로 학습한 경우, (2) 상판 연직변위를 응답변수로 학습한 경우와 (3) 상판 연직가속도 및 상판 연직변위를 함께 학습한 경우로 응답변수만을 달리 선택하여 case study를 진행하였다. Fig. 5는 각 case의 반복 횟수에 따른 정확도값에 대한 그래프로 반복횟수에 따른 학습데이터의 학습 정확도를 의미한다. 학습 완료된 신경망은 학습데이터에 대해 마지막 epoch에서 각각 최대 약 99%, 98%, 96%의 정확도를 보였다.
학습 완료된 신경망은 Deep-learning-based Prediction System 단계에서 예측 시스템 내 분류 알고리즘으로서 활용된다. Deep- learning-based Prediction System 단계에서는 이전 단계에서 학습 완료된 신경망을 활용한 예측 알고리즘을 통해 새로 입력되는 검증용 데이터에 대한 예측 결과를 제공한다. 예측 결과의 성능 지표인 분류정확도는 식 (2)와 같다.
여기서, TP는 positive 값을 올바르게 예측한 경우이며 TN은 negative 값을 올바르게 예측한 경우, FP는 positive를 틀리게 예측한 경우, FN은 negative 값을 틀리게 예측한 경우이다.
각 case의 학습 완료된 신경망의 분류정확도는 검증용 데이터에 따라 상판 연직변위에 대해서 97.75%, 상판 연직가속도에 대해서 91.20%, 상판 연직변위와 상판 연직가속도를 동시에 예측할 경우 89.15%의 정확도를 나타내었다(Table 4).
4. 결 론
이 연구에서는 철도 교량의 주행안전성 및 승차감 산정에 필요한 복잡한 과정을 대신 수행할 수 있는 딥러닝 기반의 예측시스템을 개발하였다. 단경간 단순교에 대한 예제를 이용한 예측시스템에 대한 검증을 통하여 다음과 같은 결론을 얻을 수 있었다.
딥러닝 기반 예측시스템 개발을 통해 상당한 기간이 소요되는 기존의 주행안전성 및 승차감 검토 결과를 사전에 예측하고 적합한 입력 파라미터를 미리 판단할 수 있도록 하여 설계의 경제성을 제고할 수 있는 방법을 제시하였다. 또한 단순 예제를 통하여 딥러닝 알고리즘이 동적해석을 포함한 설계 문제에 대해 적용 가능함을 확인할 수 있었다.
예제 수행 결과, 응답변수 중 상판 연직변위의 경우 97.15%로 높은 정확도로 예측할 수 있었으나 상판 연직가속도를 예측한 경우와 2개 파라미터를 함께 예측한 경우 각각 91.20%, 89.15%로 정확도가 상대적으로 낮게 나타났다. 이는 입력 파라미터에 가속도와 상관성이 높은 요소들이 부족하여 나타나는 현상으로 유추할 수 있다. 이러한 결과를 검증하기 위해 후속 연구에서는 학습 대상이 되는 입력 파라미터와 출력 파라미터 간의 상관성이 예측 결과에 미치는 영향에 대한 검토 등이 이루어져야 하며, 그 결과를 토대로 입력 파라미터별로 가중치를 차등하여 분배하는 데이터 전처리 알고리즘의 개발이 필요하다.
향후 이 연구에서 제안한 기법의 실용성을 확보하기 위해서는 다양한 열차 하중, 교량 단면 특성, 형식 및 선형 등을 고려하여 현재보다 보다 많은 파라미터를 학습하고, 이에 맞추어 신경망 내 node의 수를 늘리는 작업 등을 통하여 예측시스템을 고도화할 필요가 있다.
