

1. 서 론
건축물이 경량화, 초고층화 됨에 따라 건축물이 유연해지고 진동에 대하여 민감하게 된다. 특히, 건축물의 감쇠가 작은 경우 외력에 의해 발생하는 진동의 크기가 크게 증가하여 사용성 및 안정성에 문제점이 발생한다. 이러한 사용성 및 안전성을 향상시키기 위해 전 세계적으로 지진이나 바람과 같은 동적하중에 대한 거동을 효율적으로 제어하기 위한 연구가 광범위하게 수행되고 있다. 최근에는 구조물의 강성이나 연성을 증가시키는 방법 외에 여러 가지 제진기술을 이용하려는 연구가 여러 학자에 의해 수행되었다. 지난 30여 년간 전 세계적으로 700개 이상의 제진장치가 건물에 적용되었으며, 국내에서도 90년대 이후 진동제어 이론 및 제진장치에 대한 연구가 활발히 이루어지고 있다.
제진장치는 에너지 소산을 통해 외력이 건물에 미치는 영향을 감소시키며 제어 방식에 따라 수동형과 능동형 제진장치로 구분된다. 수동형 제진장치에는 동조질량감쇠기(Tuned Mass Damper, TMD), 동조액체감쇠기(Tuned Liquid Damper, TLD), 동조액체기둥감쇠기(Tuned Liquid Column Damper, TLCD) 등이 있고, 능동형 제진장치에는 능동질량감쇠기(Active Mass Damper, AMD) 및 수동과 능동의 특성을 결합한 복합형질량감쇠기(Hybrid Mass Damper, HMD) 등이 있다.
Min 등(2008)은 하나의 제진장치로 서로 직교하는 2방향의 건물응답을 동시에 제어하는 동조액체질량감쇠기(Tuned Liquid Mass Damper; TLMD)를 제안하고 그 성능을 실험적으로 검증하였다.
Lee 등(2008)은 TMD와 TLCD로 구성된 2방향 감쇠기의 제어성능을 실험적으로 검증하였고, 실험결과를 바탕으로 감쇠기의 동적특성에 영향을 미치는 파라미터를 정량적으로 평가하는 연구를 수행하였다.
본 연구의 선행 연구로 Lee 등(2014)은 AMD의 제어성능을 유지하며 질량과 이송거리를 최소화 할 수 있는 방안을 제시하였고, 이를 39층 건축물에 설치된 56ton 용량의 AMD에 적용하였다. 속도피드백, LQR, LQG, Bang-bang 제어알고리즘을 적용하여 실제 건축물을 대상으로 해석적 연구를 수행하여 능동제어알고리즘의 제어성능을 평가하였다.
Lee 등(2014)의 선행 연구에서 4가지 알고리즘 모두 안정적으로 제어를 수행하는 결과를 얻었다. 본 연구에서는 속도피드백을 이용한 제어알고리즘을 사용하였으며, 진동 제어 시 AMD의 스트로크(Stroke)를 컨트롤하기 위한 Gain Scheduling 원점보정신호(Constant-velocity signal)의 성능을 검증하는데 초점을 두었다. AMD 제어 알고리즘은 먼저 Matlab 수치모델을 사용하여 구현하였으며, 이 알고리즘을 PLC로 구현한 후 수치모델과 비교하였다. 또한, 구조물의 응답의 크기에 관계없이 제안된 방법에 의하여 AMD가 설계자에 의해 지정한 스트로크 범위 내에서 항상 안정적으로 거동하는 지를 확인하였으며, AMD에 의해 발생하는 힘이 감쇠력으로 작용하는지를 확인하였다. 또한 제안된 스트로크 컨트롤 기법을 적용하여 인천공항에 설치될 AMD의 공장성능 실험결과를 수록하였다.
2. 적용대상 구조물 및 AMD 사양
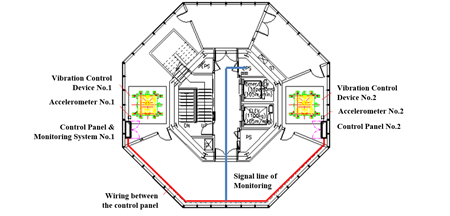
Fig. 1에 인천공항 제2계류장 관제소 및 AMD 설치위치를 표시하였다. 인천공항 제2계류장 관제소는 세장한 캔틸레버형 구조물로써 횡하중에 대한 응답은 X 및 Y 방향의 1차 모드가 지배적인 특징이 있으며, 해당 구조물의 동적특성을 Table 1에 나타내었다.

Table 1
Dynamic behavior of the control tower
| Mode | Modal mass(ton) | Natural frequency(Hz) | Damping ratio(%) |
|---|---|---|---|
| Y-Dir. | 3,168 | 0.9560 | 0.6 |
| X-Dir. | 3,130 | 1.0231 | 0.6 |
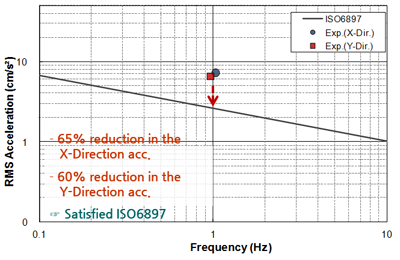
해당 지역의 기상대 풍속자료와 주변 지형을 고려한 재현주기 5년 설계풍속인 26.68m/s를 사용하여 풍동실험을 수행하였다. 그 결과 관제실에서의 최대 RMS 가속도 응답의 크기가 X, Y방향으로 각각 사용성 평가기준인 ISO6897의 283.9%, 248.9% 수준으로 매우 큰 것으로 나타났다. 따라서 관제소에 AMD를 설치하여 사용성 평가기준을 만족시킬 예정이며 이를 Fig. 2에 나타내었다.
X, Y방향의 사용성 기준을 모두 만족시키기 위해 AMD의 질량체를 두 부분으로 구분하여 설계하였다. 즉 AMD 1기에 이동질량체가 2개로 구성되어 있으며 각각 방향, 방향으로 거동하며 2축 제어를 수행하도록 하였다. 설계된 AMD의 형상 및 사양을 각각 Fig. 3과 Table 2에 나타내었다.
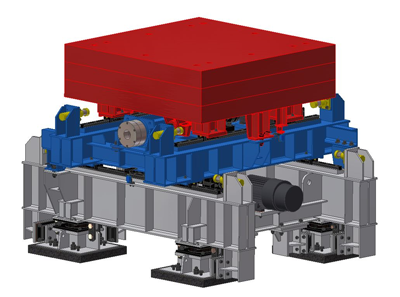
Table 2
Properties of AMD
| X-Dir. | Y-Dir. | |
|---|---|---|
| Moving mass | 10(ton) | 8.5(ton) |
| Stroke | ±7.0(cm) | ±7.0(cm) |
| Control force | 29(kN) | 21.5(kN) |
| Install area | 3.0m(W)×3.0m(L)×2.0m(H)/(set) | |
| Total mass | 15(ton/set) | |
| Control method | Ball Screw + Servo Motor | |
본 연구에서는 인천공항 제2계류장 관제탑에 설치예정인 AMD에 속도피드백 제어알고리즘을 적용시켜 실험과 수치해석 프로그램을 통한 해석결과를 비교하여 알고리즘의 제어효율 및 안전성을 검증하였다.
3. 제어알고리즘
본 연구의 AMD에는 선형제어방법 중에서 속도피드백을 통한 제어 알고리즘이 적용되었다. 속도피드백 제어 알고리즘은 가장 단순한 형태의 제어알고리즘의 하나로 구조물의 속도와 최적제어이득값의 곱으로 구현되는 제어력을 통해 구조물의 감쇠비를 증가시키는 효과를 발생시킨다. 속도피드백 제어 알고리즘에 의해 산정된 AMD의 제어력(감쇠력)은 이에 따라 발생된 AMD 가속도에 의한 관성력과도 같다. 외력과 제어력이 작용할 때의 구조물 운동방정식은 식 (1)과 같고, 속도피드백에 의한 제어력은 식 (2)와 같다. 또한 식 (1)과 식 (2)로부터 유도된 식 (3)을 통해 AMD 제어력이 구조물의 감쇠비를 증가시킴을 명확하게 알 수 있다.
식 (1)에서 ms1, cs1, ks1은 각각 구조물의 1차모드 질량, 감쇠, 강성이며 f는 외력이다. 식 (2)에서 U는 AMD의 제어력, G는 최적제어이득값, ωn은 구조물의 1차모드 고유진동수, ma는 AMD의 질량,  는 AMD의 가속도이다. 식 (3)에서 ξs1와 ξa은 각각 구조물의 1차모드 감쇠비, AMD의 감쇠비이다.
는 AMD의 가속도이다. 식 (3)에서 ξs1와 ξa은 각각 구조물의 1차모드 감쇠비, AMD의 감쇠비이다.
3.1 구조물 가속도와 AMD 제어력의 관계
조화하중에 의해 발생하는 구조물의 변위, 속도, 가속도의 관계는 식 (4)~(6)과 같다. 식 (5)는 식 (2)의 가속도항을 적분하여 sine함수로도 표현 가능하다.
여기서, Ds는 구조물 변위의 진폭, ωn은 구조물의 1차모드 고유진동수, t는 진동 발생 후 경과한 시간이다.
구조물 가속도에 의해 발생하는 구조물의 관성력은 식 (7)과 같고, AMD 제어력은 식 (2)와 식 (5)를 통해 식 (8)과 같이 나타낼 수 있다.
구조물의 관성력과 AMD의 제어력은 각각 진동수가 같은 sine함수와 cosine함수임을 알 수 있으며, 이로부터 두 힘의 위상차가 90도임을 알 수 있다. 또한 식 (7)과 식 (8)을 통해 구조물의 관성력과 AMD의 제어력은 식 (9)와 같이 타원의 방정식을 만족시킨다.
3.2 게인스케줄링(G1)과 원점보정(G2)
3.2.1 게인스케줄링(G1)
AMD 질량체를 움직이는 모터에 입력되는 제어신호를 라고 하면, 는 다음과 같고 단위는 (Revolution Per Minute)이다.
여기서, V는 제어 알고리즘을 통해 계산된 순수제어력, G1은 순수제어력에 대한 게인스케줄링, G2는 원점보정신호이다.
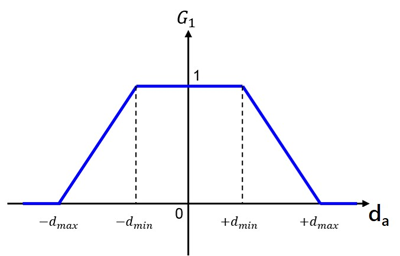
계산된 순수제어력을 모터에 그대로 입력하면, 불특정 외력에 대해서 AMD의 스트로크 중심이 원점에서 벗어나 질량체가 범퍼에 부딪혀 구조물에 충격을 가할 수 있다. 이를 방지하기 위한 방법으로 AMD 질량체의 최대변위(dmax)를 제한하는 게인스케줄링을 도입하였다. 게인스케줄링 값 은 AMD의 변위(da)가 최소제어변위(dmin)를 초과하는 순간부터 순수제어력을 조절하며 식 (11)과 같이 0과 1사이의 값을 가진다. 이를 변위에 따른 그래프로 표현하면 Fig. 4와 같다.
3.2.2 원점보정(G2)
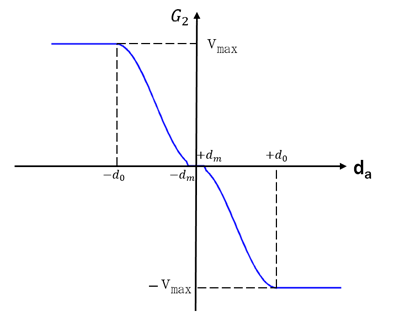
3.2.1에서 언급한 게인스케줄링은 AMD 변위에 따라 순수제어력을 조절하여 질량체가 설정한 최대변위를 초과하지 않도록 한다. 이와 함께 원점보정신호 G2는 AMD 스트로크 중심을 원점으로 복귀시켜 게인스케줄링에 의한 제어력 손실량을 감소시킨다. 또한 AMD 변위에 따라 원점복귀 속도를 조절하며, AMD 변위가 원점보정신호 최대거리(d0)를 초과하면 설정한 등속도로 AMD 스트로크 중심을 원점으로 복귀시킨다. 이 경우에는 원점보정신호에 의한 가속도가 0이기 때문에 제어력에 대한 영향을 최소화하면서도 AMD 스트로크 중심을 원점으로 이동시킬 수 있다. 식 (12)와 Fig. 5는 원점보정신호를 나타낸다.
여기서, dm은 원점보정신호 최소거리, υmax는 최대 원점복귀속도이다.
3.3 입력필터
건물의 진동을 제어하는 경우에는 계측된 데이터를 기반으로 제어기를 컨트롤한다. 또한 계측된 데이터는 노이즈를 포함하고 있으며, 이 노이즈가 제어기 컨트롤에 영향을 미칠 수 있기 때문에 노이즈를 제거하기 위해 계측된 데이터를 필터링하는 과정이 필요하다. 하지만 데이터가 필터를 통과하게 되면 위상차가 발생하게 된다. 계측된 데이터를 필터링하는 과정에서 위상차를 최대한 작게 해야 건물의 좁은 공진 진동수 영역에서 효과적인 제어가 가능하다. 이를 위해 계측된 데이터를 필터링할때 대역통과필터(band pass filter)가 이용된다. 대역통과필터는 일정 주파수 대역의 신호만 통과시키는 필터로, 저역통과필터(low pass filter)와 고역통과필터(high pass filter)를 한 번씩 사용하여 구현할 수 있다. 저역통과필터는 (+)방향의 위상차를 발생시키고, 고역통과필터는 (-)방향의 위상차를 발생시킨다. 또한 각각의 필터는 차단주파수(cutoff frequency)에 따라 발생하는 위상의 크기가 다르다. 따라서 대역통과필터를 통과한 신호의 위상차를 최소화하기 위해 저역통과필터와 고역통과필터의 차단주파수를 조절하여 설계한다(Woo et al., 2014).
서론에서 Table 1과 같이 X방향의 1차모드 고유진동수는 1.0231Hz, Y방향은 0.9560Hz이다. AMD는 각 축방향의 1차모드 고유진동수에 해당하는 구조물 가속도를 제어해야 하므로, 이에 맞는 입력필터 설계해야 한다. 1차모드만 제어하도록 입력필터를 구성하는 이유는 앞서 언급했듯이 인천공항 제2계류장 관제소가 캔틸레버형 건물로써, 횡하중에 대한 응답은 1차 모드가 지배적인 특성이 있기 때문이다.
4. 공장성능시험
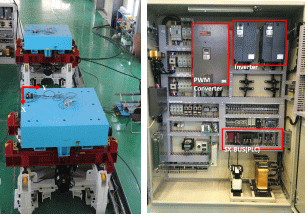
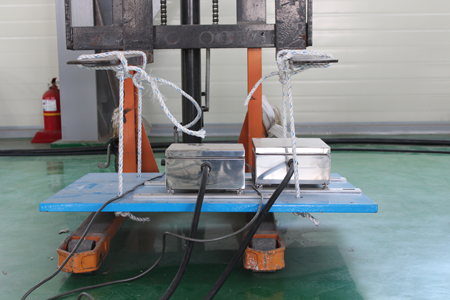
Fig. 6과 같이 관제소 제진장치실에 AMD 두 기가 배치될 예정이며, 각각의 AMD는 서로 다른 가속도 입력신호를 받아 독립적으로 거동한다. AMD의 제어성능을 평가하기 위한 공장성능시험을 수행하였다. 성능시험은 Fig. 7(a)와 같이 두 기의 AMD를 설치하여 진행하였고, 각각의 AMD별로 한 대의 제어반이 구성되어 있다(Fig. 7(b)). AMD의 구동 및 제어는 모두 제어반에서 이루어진다. Fig. 7(b)와 같이 SX-BUS라는 PLC에서 연산을 통해 생성되는 속도신호(RPM)가 인버터를 거쳐 모터에 입력되고, 다시 입력된 신호가 인버터에서 디지털신호로 변환되어 PLC로 되먹임(feedback) 된다. 제어반에 입력되는 구조물 입력신호는 Fig. 8와 같이 설치대상 구조물의 고유진동수와 유사하도록 설계한 진자에 가속도 센서를 설치하여 사용하였다. 또한 앞서 기술한 바와 같이 개별위치에 설치되는 제진장치를 위해 센서도 2개로 구성하여 입력되도록 하였다.
성능시험은 가속도계가 설치된 진자에 변위를 발생시켜 작용하는 가속도에 따라 AMD의 제어력(모터 출력), 게인스케줄링 및 원점보정신호의 발생, 값 등을 시뮬레이션 결과와 비교하는 방법으로 수행하였다. 또한 제어 시작 및 종료와 관련한 설정이 정상 작동하는지도 함께 검토하였다.
게인스케줄링 변수인 dmin과 dmax는 각각 20mm, 70mm로 설정하였고, 원점보정신호의 변수인 dm, d0, υmax는 각각 5mm, 50mm, 100RPM으로 설정하였다. 또한 AMD 질량체의 갑작스러운 동작이나 정지로 인해 구조물에 충격을 가하지 않기 위해 AMD의 동작과 정지 시 순기동, 순정지 기능을 추가하였다. 순기동, 순정지 기능은 AMD가 동작 또는 정지하는 순간부터 10초동안 속력계수(speed factor, SF)를 모터입력신호에 곱하여 갑작스러운 동작을 방지한다. 속력계수는 다음 식 (13)과 같고, 순기동 및 순정지 시 모터입력신호(Vos)는 식 (14)와 같다.
또한 AMD가 제어하는 최소 구조물 가속도 레벨은 사람이 인지할 수 있는 최소 가속도 레벨인 2cm/sec2로 설정하였다. 실제 인천공항 관제소에 설치 시에는 구조물 가속도 레벨이 1.5cm/sec2 이하로 60초 동안 지속되면 AMD가 대기모드로 전환되도록 설정할 계획이며, 공장성능시험에서는 30초 동안 지속되면 대기모드로 전환되도록 설정하였다.
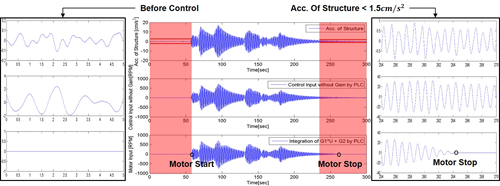
Fig. 9는 구조물 가속도에 따른 순수제어력과 실제제어력(모터출력)을 나타낸 것이다. Fig. 9(b)는 위에서부터 구조물 가속도, 순수제어력, 실제제어력을 나타내며 Fig. 9a), (c)는 Fig. 9(b)에서 붉은색으로 표시한 부분을 확대한 것이다. 제어대기 상태에서 60초 후 진자에 변위를 주었고, 제어를 시작하는 최소 구조물 가속도인 2cm/sec2 이상의 가속도가 발생하자 모터에 의해 제어력이 출력되는 것을 알 수 있다.
또한 Fig. 9(c)에서 구조물 가속도가 1.5cm/sec2 이하 상태로 30초가 경과한 후 모터가 정지함을 알 수 있다. Fig. 9(a),(c)를 통해 모터 출력이 0인 제어대기구간에서 순수제어력에 대한 연산은 종료되지 않고 계속 수행되고 있음을 알수 있다.
4.1 입력필터 설계
Fig. 10에서 알 수 있듯이 인천공항 관제소의 가속도 계측을 위한 센서의 평상시 노이즈 레벨은 약 3cm/sec2 이다. 이는 AMD와 제어반의 고출력 전력에 의한 것으로 사료된다. 발생된 노이즈는 AMD의 제진구동이 시작되는 2cm/sec2 보다 1.5배 큰 수준이다. 노이즈를 제거하지 않을 경우, 구조물에 실제로 발생한 가속도가 없더라도 AMD가 노이즈를 실제 구조물 가속도로 인식하여 이를 제어하려고 하여 구조물을 가진시키는 결과를 발생시킬 수도 있다. 따라서 평시에 계측되는 높은 레벨의 노이즈를 제거하기 위해, 입력필터를 적용하였다. 입력필터는 인천공항 관제소의 1차 모드 진동수인 약 1Hz의 진동수를 갖는 신호를 식별하기 위해 0.5Hz에서 2.0Hz의 차단주파수를 갖는 총 10차 대역통과필터를 적용하였다. 적용된 대역통과필터는 고역통과필터와 저역통과필터가 각각 5차로 구성되었다. 적용된 필터의 진동수 스펙트럼은 Fig. 11과 같다.
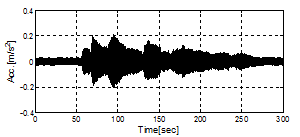
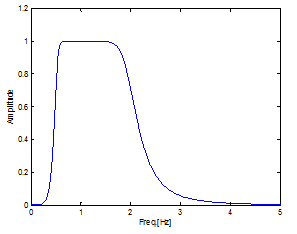
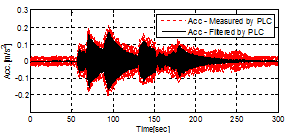
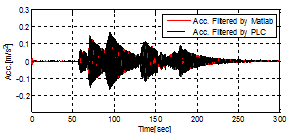
Fig. 10의 공장성능시험 시 계측된 가속도 데이터가 적용된 대역통과필터를 통과하면 Fig. 12와 같다. Fig. 12(a)에서 측정된 구조물 가속도가 대역통과필터를 통과하여 노이즈가 적절히 제거됨을 확인하였다. 또한 Fig. 12(b)에서 Matlab을 통한 가속도 데이터 필터링 연산결과와 AMD 컨트롤러의 CPU인 PLC를 통한 연산결과가 일치함을 확인하였으며, 이를 통해 AMD 컨트롤러가 안정적으로 구조물 가속도 신호를 필터링하고 있음을 알 수 있다.
4.2 AMD 제어력
4.2.1 게인스케줄링(G1)
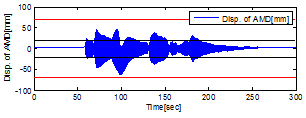
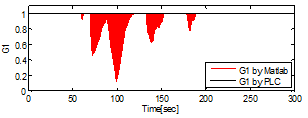
Fig. 12(b)와 같은 구조물 가속도를 제어하기 위한 AMD 변위 및 이에 따른 AMD 순수제어력 보정계수(G1)는 각각 Fig. 13(a), Fig. 13(b)와 같다. 3.2.1에서 언급한 것처럼 게인스케줄링값은 AMD 변위의 절대값이 dmin을 초과하는 시점부터 1 이하의 값을 가진다. G1값이 처음으로 1보다 작아지는 시점은 60초이며 값은 0.9이다. 이는 AMD 순수제어력을 10% 감소시켜 구조물을 제어한다는 것을 의미한다. 계측 시작 이후 약 100초 부근에서 AMD 변위의 절대값이 dmax에 가까워짐에 따라 0에 가까운 값을 가짐을 확인하였고, AMD 질량체가 dmax를 초과하지 않음을 검증하였다.
3.3절의 입력필터와 마찬가지로 게인스케줄링 값 역시 Matlab을 통한 연산결과와 PLC 연산결과가 일치하였으며, 이를 통해 게인스케줄링이 설계의도대로 실시간 적용되고 있음을 확인하였다.
4.2.2 원점보정신호(G2)
Fig. 14는 AMD 변위에 따른 원점보정신호를 나타낸다. 여기서 원점보정신호는 AMD 변위의 절대값이 dm을 초과하는 순간부터 발생하고, AMD 변위의 절대값이 d0 이상이 되면 υmax의 일정한 속도로 발생함을 알 수 있다.
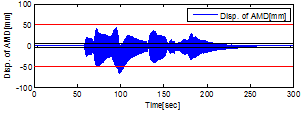
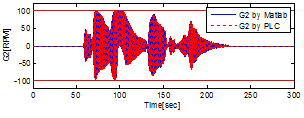
Fig. 14(a)에서 계측 이후 85초~100초 구간에는 AMD 질량체의 스트로크 중심이 원점에서 크게 벗어나며 구조물을 제어하고 있다. 이 구간에서 원점보정신호에 의해 AMD 질량체의 스트로크 중심이 원점으로 이동함을 Fig. 14(a) 100초~120초 구간에서 확인할 수 있으며, AMD 변위가 d0를 초과하는 95초~105초 구간에서 원점보정신호가 υmax의 등속도로 발생함을 확인하였다. 이 때 등속도로 스트로크 중심을 이동시키기 때문에 원점보정신호가 제어력에 영향을 미치지 않는다.
원점보정신호에 대한 Matlab 시뮬레이션 결과와 PLC 연산결과를 비교한 결과 정확히 일치함을 확인하였다.
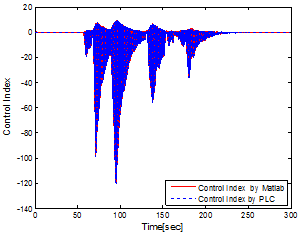
4.2.3 제어효율지수(Control Index)
앞서 언급한 게인스케줄링과 원점보정신호는 AMD가 구동하는 동안 안정적인 제어와 함께 AMD 장치 자체와 구조물에 대한 안정성을 확보하는 방안이다. 하지만 실제로 제진장치가 구조물을 안정적으로 제어하는지에 대한 모니터링도 중요하다. 만일 AMD가 제어를 하지 못하고 구조물을 가진하는 상황에서는 자동으로 정지되도록 해야 한다. 이를 모니터링하기 위해 제어효율지수(Control Index, CI)를 고안하였다. 제어효율지수는 AMD 제어력과 구조물 가속도 곱을 통해 확인이 가능하다. 식 (2)와 식 (5)~(6)을 통해 제어효율지수를 식 (15)와 같이 나타낼 수 있다. 즉 제어효율지수는 AMD가 구조물을 제어하는 경우 항상 음수의 값을 가짐을 알 수 있다. 반대로 제어효율지수가 양수의 값을 가지는 경우에는 AMD가 구조물을 가진 하는 것으로 판단하여 자동정지 하도록 할 수 있다.
실제 계측된 구조물 가속도와 그에 따른 AMD 제어력의 곱인 제어효율지수는 Fig. 15과 같다.
Fig. 15를 통하여 AMD가 동작하는 동안 제어효율지수가 대부분 (-)값을 가지며 거동하고 있으나, (-)응답이 큰 구간에서 (+)응답이 나타났다. 이는 구조물 가속도가 커짐에 따라 AMD 순수제어력 이외에 게인스케줄링과 원점보정신호가 발생하여 나타나는 현상이다. 하지만 (-)응답이 큰 구간에서의 (+)응답의 크기는 (-)응답 크기의 약 7.5% 수준으로 제어에 미치는 영향이 미미함을 확인하였다.
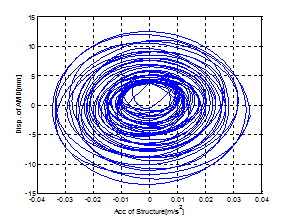
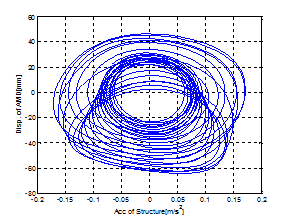
4.2.4 구조물 가속도와 AMD 제어력의 위상차
Fig. 16은 구조물 가속도와 AMD 변위에 따른 위상을 나타낸 것이다. Fig. 16(a)와 같이 구조물 가속도의 크기가 작은 경우에는 AMD 변위도 작게 발생하여 게인스케줄링 및 원점보정신호에 대한 영향이 거의 없어 구조물 가속도와 AMD 변위 그래프가 타원을 이루고 있음을 알 수 있다. 하지만 Fig. 16(b)와 같이 구조물 가속도의 크기가 큰 경우에는 AMD 변위가 크게 발생하기 때문에 게인스케줄링 및 원점보정신호에 의해 순수제어력이 감소하며 위상의 변화가 발생하였으나 제어성능에는 큰 영향이 없음을 확인하였다.
5. 결 론
본 연구의 최종목표는 AMD를 이용하여 인천공항 제2계류장 관제소의 사용성이 ISO6897을 만족하도록 하는 것이다. 본 논문은 그 전 단계로써, AMD 설치 전 속도피드백 제어알고리즘에 적용된 게인스케쥴링과 원점보정 신호에 대한 제어성능 및 안전성을 평가하였다. 이를 위해 공장성능시험에서 임의의 구조물 가속도를 발생시켰을 때 AMD가 제어를 수행한 결과와 수치해석 프로그램인 Matlab을 통한 해석결과를 비교하여 다음과 같은 결론을 얻었다.
(1)구조물 가속도를 측정하는 센서의 입력필터 적용결과, 평상시 발생하는 높은 레벨의 노이즈와 고차모드 성분을 적절히 제거하여 AMD의 오작동 및 구조물을 가진하는 현상을 방지함을 확인하였다.
(2)게인스케줄링을 통하여 AMD가 설정한 스트로크 범위를 벗어나지 않음을 확인하였다. 이를 통해 큰 구조물 가속도가 발생하는 경우 AMD의 질량체가 허용 스트로크 범위를 벗어나 범퍼에 부딪혀 구조물에 충격을 가하는 문제점을 해결하였다.
(3)원점보정신호를 통하여 AMD 질량체의 스트로크 중심을 원점으로 유도하여 임의의 구조물 가속도에 대한 AMD 제어력 손실을 최소화하였다. 또한 큰 구조물 가속도가 발생하여 AMD 변위가 원점보정 최대거리를 초과하는 경우에는 제어력에 영향을 미치지 않도록 AMD 스트로크 중심을 등속도로 원점복귀 시킴을 확인하였다.
(4)제어효율지수를 통해 AMD가 구조물의 제어상태(제진 또는 가진)를 실시간으로 모니터링할 수 있으며, 공장성능시험 시 제어효율지수가 대부분 (-)값을 가졌으나 (+)값을 가지는 구간도 발생하였다. 하지만 (+)값의 크기는 (-)값의 크기의 7.5% 수준으로 제어에 영향을 미치는 정도가 미미하다. 또한 이를 이용하여 제어효율지수가 일정한 (+)값을 초과하면 AMD가 구조물을 가진한다고 판단하여 자동정지할 수 있는 시스템을 구현할 수 있다고 판단된다.
(5)구조물 가속도와 AMD 변위의 위상차 확인을 통해 AMD 변위가 매우 큰 경우를 제외하고 정확히 90도의 위상차를 유지하며 제어력을 발휘하고 있음을 확인하였다.
