

1. 서 론
2. 이론적 배경
2.1 기어 전달오차 정의 및 평가 방법
2.2 유한요소 접촉해석을 통한 전달오차 평가
2.3 가우시안 프로세스 대리모델
2.4 베이지안 최적화 기법
3. 수치 예제
3.1 기어 모델 및 설계 변수 정의
3.2 설계 민감도 해석
3.3 설계공간 설정 및 초기 샘플 획득
3.4 베이지안 기반 최적화 결과 및 검증
5. 결 론
1. 서 론
기어는 기계 시스템에서 회전을 통해 동력을 전달하는 핵심 부품으로 효율적인 동력 전달을 위한 중요한 역할을 수행한다. 기어가 회전하면서 동력을 전달할 때, 기어의 치가 주기적으로 맞물리며 접촉이 발생한다. 이 과정에서 기어 간의 상호작용으로 인한 규칙적인 소음과 진동을 유발한다. 특히 기어의 변형은 전달되는 동력의 효율성에 영향을 미치며, 이러한 변형에 의해 발생되는 전달오차(TE: Transmission Error)는 기어의 성능을 평가하는 중요한 지표로 활용해 왔다. 이는 최적의 동력 전달 성능을 도출하는 데 중요한 요소로 작용하며, 기어의 치형 수정은 TE에 상당한 영향을 미친다(Choi et al., 2021; Kahraman, 1994; Litvin and Fuentes, 2004).
기어 설계는 일반적으로 ISO(2019), AGMA(2004) 등의 규격을 참고하여 치물림 강성의 변화와 응력을 계산하는 방식으로 이루어진다. 그러나 이러한 규격은 루이스(Lewis)식을 이용한 빔(Beam) 모델 기반의 근사를 적용하므로 기어의 치형을 반영할 수 없고, 여러 치가 동시에 맞물릴 때 발생하는 치 강성의 변화를 고려하지 못하는 한계가 있다. 이로 인해 치물림 시 강성의 변화를 반영해야 하는 TE 예측에서 이러한 규격 기반의 해석은 한계가 있다. 따라서 TE를 정확하게 예측하기 위해서는 기어 형상을 모두 반영할 수 있는 유한요소해석(FEA: Finite Element Analysis) 방법을 사용할 수 있다(Kawalec et al., 2006).
ANSYS Workbench(Ansys Inc., 2004)를 이용하여 치면 접촉 마찰력, 요소망 생성, 모델 간소화 등 FEA 결과에 미치는 영향을 연구하였다(Kim et al., 2023). 기어의 FEA는 접촉과 마찰 등을 고려한 비선형 해석을 필요하므로, 긴 해석 시간과 높은 계산 비용이 요구된다. 특히, TE를 줄이기 위한 기어 형상의 최적화에는 반복적인 접촉해석이 필요하므로 FEA를 이용한 최적화는 비효율적이다. 따라서 이를 보완하기 위해 대리모델(Surrogate Model)을 사용할 수 있다. 치형 생성 변수인 어덴덤(Addendum)과 디덴덤(Dedendum)의 길이를 주요 최적 설계 변수로 사용하고, 이를 바탕으로 대리모델 기반 최적화 기법을 제시하였다(Kim et al., 2023).
본 연구에서는 설계 민감도 해석(Design Sensitivity Analysis)을 수행하여 TE에 영향을 미치는 주요 기어 형상 설계 변수를 도출하였다. 이후 전역 최적점을 찾기 위해 베이지안 최적화(BO: Bayesian Optimization) 기법을 적용하여 기어 치형 변화를 통한 TE 최소화를 진행하였다(Jones et al., 1998; Shahriari et al., 2016). 이는 주어진 초기 샘플을 이용하여 가우시안 프로세스(GP: Gaussian Process) 대리모델을 구성하고 평균과 분산 정보를 바탕으로 기대 개선치(EI: Expected Improvement)가 최대가 되는 지점에서 새로운 샘플 데이터를 얻는 방식으로 진행하였다(Rasmussen and Williams, 2006). 제한된 초기 데이터를 활용한 수치적 예제를 통해 본 논문에서 제시한 방법의 효율성과 정확성을 검증하였다.
2. 이론적 배경
2.1 기어 전달오차 정의 및 평가 방법
TE는 기어가 동력을 전달할 때 이상적인 회전각과 실제 전달된 회전각의 차이를 의미한다. 이 오차는 기어 치형 설계, 기어 제작 오차, 그리고 조립 상태 등에 따른 기계적 불완전성에 의해 발생한다. TE를 수식으로 표현하면, 식 (1)과 같이 구동기어의 회전 각도 에 피치원 반경을 곱한 값과 피동기어의 회전 각도 에 피치원 반경 을 곱한 값의 차로 정의된다.
여기서, 𝜂은 기어비이다. 일반적으로 기어 진동이나 소음은 TE의 최대값과 최소값의 차이인 전달오차 진폭(PPTE: Peak-to-Peak Transmission Error)을 고려하며 다음 식 (2)와 같이 계산한다.
2.2 유한요소 접촉해석을 통한 전달오차 평가
기어 쌍의 접촉해석은 KISSsoft AG(2025)와 같은 기어 전용 프로그램을 활용하는 방법과 Abaqus/CAE(Dassault Systèmes Simulia Corp., 2025)와 같은 유한요소해석 프로그램을 활용하는 방법이 있다. 전자는 계산이 빠르고 사용이 간편하지만 빔 모델 기반의 근사를 적용하므로 기어 치형을 반영할 수 없어 해석 결과의 정확도가 낮다. 반면, 후자는 해석 결과의 정확도는 높지만 계산 시간이 길다.
KISSsoft는 기어 TE를 계산할 때 ISO(2019) 기반으로 빔 이론에 기반하여 한 개의 기어 치가 맞물리는 상황을 가정하여 계산한다. 이 과정에서 기어 치형에 따른 물림률을 반영하지 못한다. 따라서 여러 기어 치가 맞물리는 다중 접촉을 반영한 기어 TE를 고려하기 위해 유한요소 기어 접촉해석을 활용하였다.
2.2.1 전달오차 해석 모델
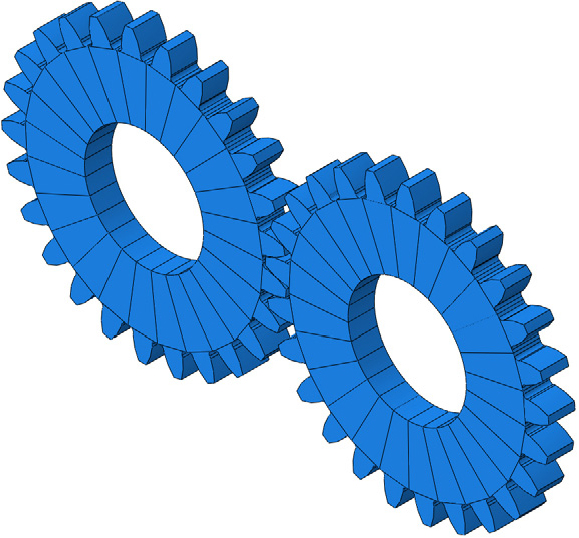
본 연구에서는 Fig. 1과 같이 동일 평기어 쌍(Spur gear pair)을 대상으로 TE 해석을 수행하였다. 평기어 쌍은 AGMA(2004) 규격을 따라 설계하였으며, 탄성계수 210GPa, 푸아송비 0.3의 탄소강 재질을 적용하였다. 평기어 쌍의 상세 제원은 Table 1에 정리하였다.
Table 1.
Detailed specifications
| Gear | Pinion | |
| Teeth number | 25 | |
| Module | 8mm | |
| Pressure angle | 20° | |
| Pitch radius | 100mm | |
| Face width | 20mm | |
| Addendum factor | 1 | |
| Dedendum factor | 1.25 | |
| Root fillet factor | 0.3 | |
2.2.2 전달오차 해석 조건
기어 접촉해석은 접촉, 마찰, 변형 등 여러 비선형 현상이 동반되므로 이를 정확히 반영하기 위해 비선형 해석을 진행하였다. 기어의 한 회전 주기 동안 치물림 구간을 일정 각도 간격으로 분할하여 계산하고 각 단계에서 이상 회전각과 실제 회전각의 차이를 계산하여 TE를 평가하였다.
구동 조건은 구동기어가 1.5rad/sec(≈14.3rpm)로 회전하고, 피동기어에 400N・m의 부하를 인가하였다. 구동기어의 회전속도가 충분히 낮으므로 정적 비선형 해석을 진행하였다. 요소망은 1차 육면체 요소 C3D8을 사용하였다.
접촉 조건은 General Contact을 적용하여 자동으로 접촉쌍을 설정하였고, Normal behavior는 Hard contact 설정을 사용하였다. Constraint enforcement method는 기본값을 사용하였으며, Tangential behavior는 Penalty 마찰 모델을 적용하여 Frictional coefficient 0.2로 설정하였다.
2.2.3 유한요소 모델 생성
본 연구에서는 기어의 접촉해석을 위해 상용 유한요소해석 프로그램인 Abaqus/CAE(Dassault Systèmes Simulia Corp., 2025)를 사용하였다. 8절점 육면체 요소 C3D8 기반 모델로 해석을 수행하였으며, Fig. 2는 해당 요소를 이용해 생성한 기어 전체 모델을 보여준다. 유한요소 모델 생성은 아래의 4단계를 거쳐 생성하였다:
1)접촉이 발생하는 치 영역만 추출하여 간소화 치형 모델 구축
2)정확도와 계산 효율의 균형을 고려한 요소망 크기 선정
3)계산량을 줄이기 위해 치폭 방향의 요소망 개수 축소
4)간소화로 인한 강성 저하가 보정되도록 개선형 간소화 유한요소 모델 생성

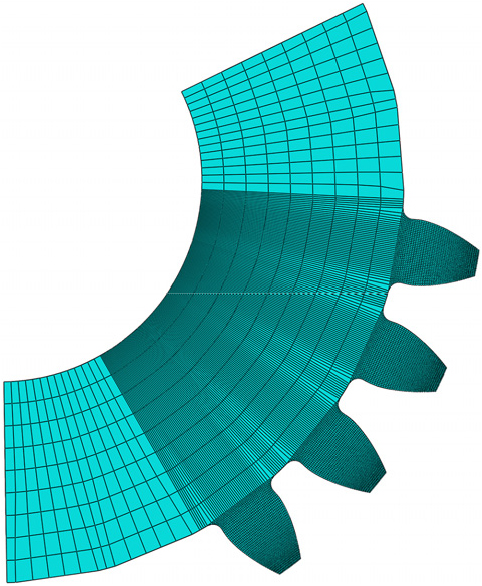
유한요소해석 시 계산 시간을 줄이기 위해 전체 모델을 간소화하여 해석하는 방법은 보편적으로 활용된다(Kim et al., 2023). 본 논문에 사용된 기어는 물림률이 1.6117이므로 기어 치물림 1주기 동안 치 접촉이 이루어지는 치는 총 3쌍이지만, 치 변형에 따른 물림 변화를 고려하여 Fig. 3과 같이 기어 치 4쌍의 간소화된 모델을 구축하였다.

t4b4 모델은 기어 치 4개와 기어 몸체 4개로 이루어진 간소화 모델이다. Fig. 4는 t4b4 모델을 이용하여 여러 요소망 크기에 따른 PPTE 수렴성을 나타낸 그래프이다.

t4b4 모델의 비선형 접촉해석 시간과 PPTE는 모델 요소망 크기에 민감하다. 이에 기어 치의 요소망 크기를 0.5mm~1.2mm 범위에서 변화시켜 민감도를 비교하였다(Table 2, Fig. 5).
Table 2.
Analysis time and PPTE values for various mesh sizes of model t4b4
|
Mesh 1.2mm |
Mesh 0.9mm |
Mesh 0.6mm |
Mesh 0.5mm |
Mesh 0.3mm | |
| Analysis time | 5.48h | 4.11h | 13.98h | 23.30h | 67.24h |
| PPTE () | 18.9 | 24.9 | 28.7 | 30.0 | 30.9 |
| Number of elements | 30,736 | 62,304 | 183,084 | 301,600 | 691,440 |

그 결과, 0.5mm 요소망은 0.3mm 요소망 대비 약 3%의 PPTE 차이를 보이며, 해석 시간은 1/3 수준으로 단축되었다. 정확도와 계산 효율을 고려하여, 본 연구에서는 유한요소 모델의 요소망 크기를 0.5mm로 설정하였다. 1.2mm 요소망은 크기가 지나치게 커 수렴성이 떨어졌으며, 0.9mm 요소망 대비 해석 시간이 증가하는 경향을 보였다.
Fig. 6의 (a)와 같이 비관심 영역을 포함한 해석 모델의 전 영역을 고밀도 요소로 구성하면 불필요한 계산이 증가해 비효율적이다. 이에 Fig. 6의 (b)와 같이 치폭 영역을 저밀도 요소로 조절하여 전체 요소 수를 줄이고 해석 시간을 단축하였다. 검증 결과, Table 3과 같이 치폭 영역의 요소 수를 감소시켜도 PPTE 결과 값은 동일함을 확인하였다.

Table 3.
Analysis time and PPTE of t4b4 model
| Face width mesh density | High density | Low density |
| Analysis time | 23.30h | 5.22h |
| PPTE () | 30.0 | 30.0 |
| Number of elements | 301,600 | 75,400 |
기어 전체 모델을 간소화하여 해석했기 때문에 결과에는 분명한 PPTE 오차가 발생한다. 이를 보정하기 위해 t4b4 모델에 Fig. 7과 같이 기어 몸체 4개를 추가한 t4b8 모델을 구성하여, 기어 전체 모델과 PPTE 일치도를 높였다.
그 결과, Table 4와 같이 t4b4 모델은 기어 전체 모델 대비 약 6.25%의 PPTE 차이를 보이고, 해석 시간은 1/6 수준으로 단축되었다. 반면 t4b8 모델은 해석 시간이 t4b4 모델과 거의 동일하였으며, 기어 전체 모델 대비 약 1.58%의 PPTE 차이를 보였다. 따라서 기어 전체 모델과 유사한 PPTE 값을 가지면서 계산 비용을 절감할 수 있는 개선형 간소화 모델인 t4b8 모델을 최종 유한요소해석 모델로 사용하였다.
Table 4.
Analysis time and PPTE for each model with mesh size 0.5mm
| Model | Gear FEA model | t4b8 | t4b4 |
| Analysis time | 31.06h | 5.57h | 5.22h |
| PPTE () | 32.0 | 31.5 | 30.0 |
| Number of elements | 471,250 | 77,920 | 75,400 |
2.3 가우시안 프로세스 대리모델
본 연구에서는 BO를 위해 GP 대리모델을 사용하였다. GP 모델은 입력 x와 출력 의 관계를 평균값 와 두 데이터와 간의 상관관계 확률적 모델로 정의된다. GP 모델에서 새로운 입력 의 예측 평균 와 분산식 은 다음 식 (3), (4)와 같다.
여기서, 상관관계 함수 은 다음 식 (5)와 같다.
는 상관관계 함수 로부터 얻어진 행렬값으로, 데이터 와 이 주어졌을 경우 의 번째 행과 번째 열 성분은 로 정의되며, 상관관계 함수 벡터 의 번째 성분은 와 같다. 𝛩은 데이터 상관관계를 조절하는 데 사용되는 하이파라미터(Hyperparameter)로, 최대우도(Maximum Likelihood) 최적화 기법을 이용하여 구할 수 있다.
GP 모델은 주어진 샘플 데이터 간의 상관관계를 학습하기 때문에, 적은 샘플로 정확한 대리모델을 생성할 수 있다는 장점이 있다. 학습이 완료되면 기존 샘플 정보를 바탕으로 모사하려고 하는 모델의 평균과 분산의 정보를 제공하며, 이를 통해 GP가 가장 많이 개선될 수 있는 추가 샘플링의 위치에 대한 정보를 쉽게 판단할 수 있다. 이렇게 얻은 정보를 토대로 데이터 샘플을 반복적으로 갱신하면, GP는 점차 정밀해지고 탐색의 불확실성은 줄어든다. 따라서 GP 대리모델은 현재 데이터를 기반으로 다음 평가점을 제안하며, 전역 최적 탐색을 지향하는 BO에 적용하는 것이 적합하다.
2.4 베이지안 최적화 기법
BO 기법은 계산 비용이 큰 함수의 전역 최적화를 위해 GP 모델과 같은 확률 모델로 목적함수를 근사하고, 획득함수(Acquisition function)를 이용해 다음 샘플링 위치를 선택하는 기법이다(Feng et al., 2014; Ragueneau et al., 2024). 다음 위치 은 다음 식 (6)과 같이 결정한다.
은 획득함수로, 다음 식 (7)과 같이 나타낸다(Jones et al., 1998).
여기서, 의 첫 번째 항은 활용(Exploitation) 부분으로 최적해 탐색을 위한 샘플링에 관여하는 항이며, 두 번째 항은 탐색(Exploration) 부분으로 모델의 예측 불확실성을 개선하는 데 관여하는 항이다. 은 최적점 에서 현재까지 얻은 최적값을 의미하며, 과 은 각각 누적분포함수(CDF: Cumulative Distribution Function)와 확률밀도함수(PDF: Probability Density Function)이다. 표준편차 일 경우, 정규화된 개선량 는 다음 식 (8)과 같이 정의된다.
값이 최대가 되는 값을 지속적으로 업데이트하면 확률 모델인 GP 모델을 개선하며 전역 최적해를 찾을 수 있다.
Fig. 8은 1차원 GP 모델의 개선 과정을 나타낸다. Fig. 8의 (a)는 초기 GP 모델의 예측 결과로, EI 값이 최대가 되는 지점(Suggested next design)을 보인다. 해당 지점에서 새로운 샘플을 추가하여 모델을 갱신하면, Fig. 8의 (b)와 같이 EI 분포와 업데이트된 GP 모델을 확인할 수 있다.

이러한 과정을 반복함으로써 GP 모델의 정확도가 점진적으로 향상되며 BO 기법을 이용한 전역 최적해 탐색이 가능해진다.
3. 수치 예제
3.1 기어 모델 및 설계 변수 정의
기어 치형은 거시 제원변수(Macro-geometry variables)와 미시 제원변수(Micro-geometry variables)로 구분해 설계할 수 있다. 거시 제원변수는 어덴덤, 디덴덤, 이뿌리 필렛 반경(Root fillet radius), 모듈(Module), 압력각(Pressure angle) 등이 포함되며, 이는 주로 가공 공구(Cutting tool) 형상과 제작 방법에 의해 결정된다. 미시 제원변수는 치면(Flank)의 프로파일(Profile) 방향과 리드(Lead) 방향 등에 대한 치형 수정을 뜻하며, 별도의 열처리나 연마 공정(Grinding tool)으로 치형을 수정할 수 있다.
미시 제원변수 변경을 통한 성능 향상이 가능하더라도, TE 등 기어 성능 지표는 초기 거시 제원변수 설정의 영향을 크게 받는다. 따라서 본 연구에서는 거시 제원변수에 한정하여 최적화를 수행하였다.
3.2 설계 민감도 해석
설계 공간을 축소하기 위해 TE에 대한 영향도가 큰 거시 제원변수를 선별하고자 민감도 해석을 수행하였다. 해석 조건에서 큰 토크가 작용함을 고려하여 충분한 강도와 내구성을 확보하고 고부하 조건에서의 안정적인 동력 전달을 확보하기 위해 모듈은 8mm로 고정하였다. 또한, 제조 용이성과 표준 설계와의 호환성을 고려하여 일반적으로 널리 사용되는 표준 각도인 20°로 고정하여 민감도 해석을 진행하였다. 그 결과, 거시 제원변수 가운데 TE에 주요하게 영향을 미치는 변수로 어덴덤과 디덴덤을 선별하였다. 이뿌리 필렛 반경은 TE에 대한 영향이 크지 않은 것으로 확인하였다.
민감도 해석은 기준 설계점에서 각 거시 제원변수를 하나씩 독립적으로 ±∆만큼 변화시켜, PPTE의 변화량을 중앙차분법으로 근사하여 계산하였다. 즉, 기준 설계점에서 변수 변화에 따른 PPTE의 민감도를 식 (9)와 같이 계산하였다. 기준 설계점은 어덴덤 8mm, 디덴덤 10mm, 이뿌리 필렛 반경 2.4mm이며, 이때의 PPTE 값은 30이다. 각 변수의 변화 폭 ∆는 ±1mm로 설정하였고, 모듈・압력각・재료・하중・회전속도 및 해석 조건・요소망 조건은 모두 동일하게 유지하였다. 민감도 산정식은 다음과 같다.
여기서, 는 해당 변수, 는 기준 설계점, 는 해당 변수의 변화량이다. 민감도 해석 결과는 Table 5에 제시하였다.
Table 5.
Sensitivity of macro-geometry variables
| Sensitivity (/mm) | |
| Addendum | 3.8 |
| Dedendum | 2.5 |
| Root fillet radius | 1.1 |
3.3 설계공간 설정 및 초기 샘플 획득
변수 공간은 AGMA(2004)을 참조하여 어덴덤 팩터(Factor) 와 디덴덤 팩터 의 범위를 각각 [0.6, 1.2], [1.2, 1.8]로 설정하였다. 해당 범위는 치형 간섭 회피와 유효 물림률 확보를 위한 규정 범위를 따르며, 맞물림 조건을 만족하도록 설정하였다. 초기 샘플 13개의 상세 배치는 Table 6에 제시하였다.
Table 6.
Bayesian Optimization initial 13 samples
| PPTE () | ||
| 0.6 | 1.4 | 19.3 |
| 0.6 | 1.6 | 23.5 |
| 0.7 | 1.4 | 32.4 |
| 0.7 | 1.8 | 41.1 |
| 0.8 | 1.4 | 34.4 |
| 0.8 | 1.8 | 42.8 |
| 0.9 | 1.2 | 31.5 |
| 0.9 | 1.4 | 35.7 |
| 1.0 | 1.8 | 43 |
| 1.1 | 1.4 | 31.5 |
| 1.1 | 1.6 | 33.3 |
| 1.2 | 1.4 | 19.5 |
| 1.2 | 1.6 | 20.1 |
설계 변수 공간을 편향 없이 탐색하기 위해 전체 공간에서 초기 샘플 13개를 무작위로 선정하였다. BO는 초기 샘플 수가 적어도 확률 대리모델을 통해 전역 최적점을 탐색할 수 있다. 이에 각 초기 샘플에 대해 기어 접촉 FEA를 수행하고, 해석 결과로부터 PPTE를 산출하여 13개의 초기 샘플 데이터셋을 구축하였다.
3.4 베이지안 기반 최적화 결과 및 검증
본 연구의 BO 절차는 다음과 같다. 설계변수 공간에서 구성된 13개의 초기 샘플 데이터셋을 이용해 기어 접촉 FEA를 수행하여 PPTE를 산출하고, 이를 이용해 GP 대리모델을 학습한 뒤 EI 기준에 따라 다음 샘플을 선택하였다. 선택된 점에서 추가 FEA를 수행하고 PPTE를 산출해 데이터셋을 갱신하고 GP 모델을 재학습하며, 수렴 조건을 만족할 때까지 이 과정을 반복해 최적점을 탐색하였다.
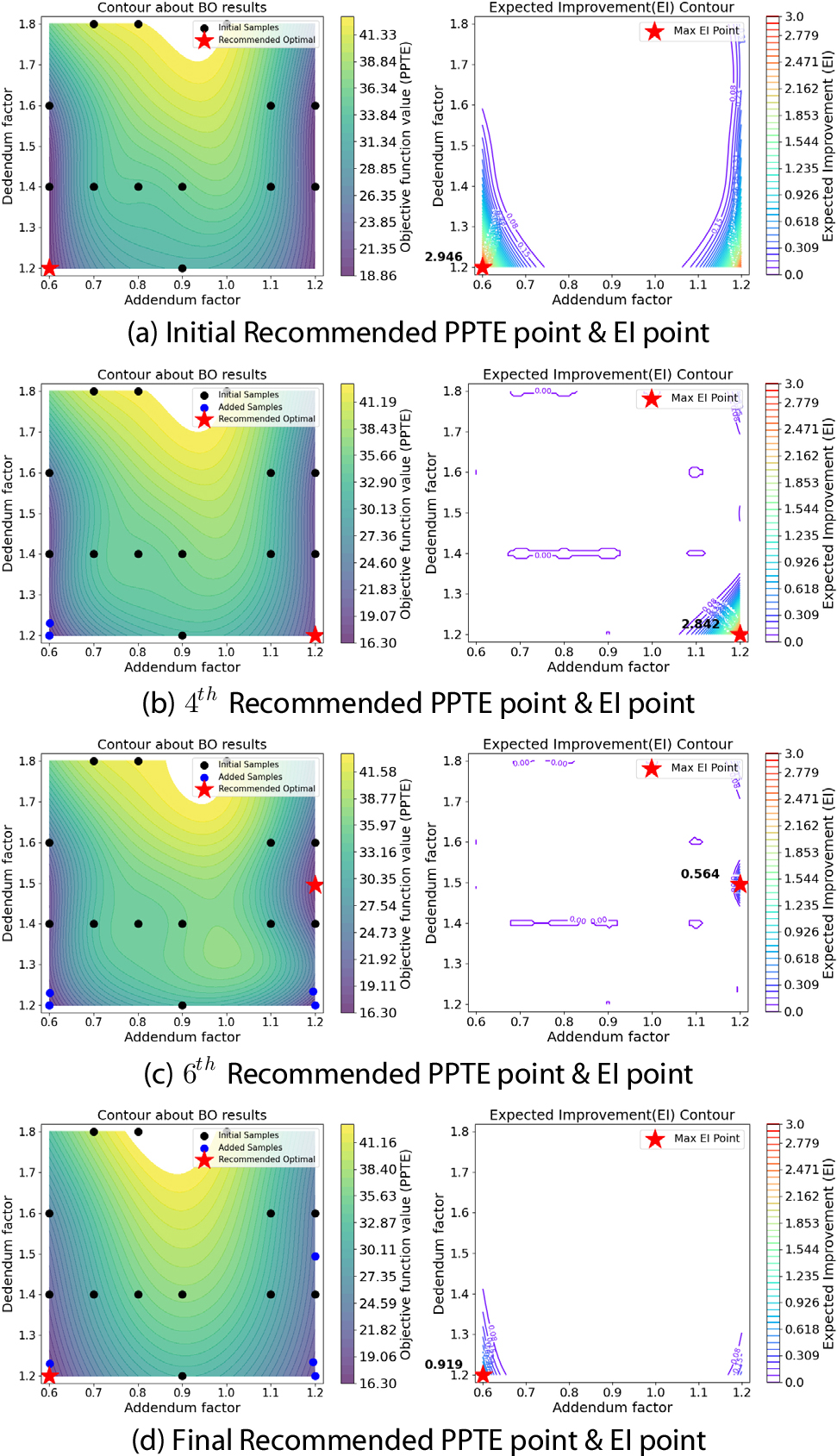
각 샘플의 FEA를 수행하고 데이터셋을 갱신하며 7차례의 BO 탐색을 진행한 결과, = 0.6, = 1.2가 설계 범위 내 최적해임을 확인하였다. Fig. 9는 7차례의 BO 탐색 과정을 나타낸 것으로 각 단계의 왼쪽 열에는 PPTE 값의 등고선이, 오른쪽 열에는 EI 값의 등고선이 각각 시각화되어 있다.
도출된 설계 변수의 최적점과 PPTE 결과는 유전 알고리즘(GA: Genetic Algorithm) 기반 탐색으로 교차 검증하였다. 모든 검증에서 개선형 간소화 t4b8 유한요소 모델과 0.5mm 요소를 동일하게 적용하였다. Population = 100, Generation = 50으로 설정하고, 계산 비용 절감을 위해 BO 로 학습된 GP 대리모델을 활용하였다. 그 결과, 약 10세대 이후로 BO와 동일한 최적해 = 0.6, = 1.2에 안정적으로 수렴하였다.
효율성 비교는 목적함수 평가 횟수(Function Call)를 공통 지표로 하였으며 이는 Table 7에 나타내었다. BO의 Function Call 수는 초기 샘플 수 13개와 BO 과정을 통해 추가된 샘플 수 7개의 합인 20회로 정의하였고, GA의 Function Call 수는 Population과 Generation의 곱인 5,000회로 정의하였다.
Table 7.
Comparison of BO and GA
| BO | GA | |
| (,) | (0.6000,1.2000) | (0.6000,1.2000) |
| Function call |
20 (Initial 13 samples + BO added 7 samples) | 5,000 |
| Analysis time | 111.4h | 27,850h |
| PPTE () | 16.3 | 16.3 |
GA의 Function Call 5,000회를 고려한 결과, 총 해석 시간은 약 27,850h로 추정되었다. 이는 t4b8 유한요소 모델의 해석시간 5.57h/회를 이용해 산정하였다. 반면 BO는 GA보다 Function Call 횟수가 약 156배 감소(≈99.4%)하였고, 서로 동일한 최적점을 도출하였다.
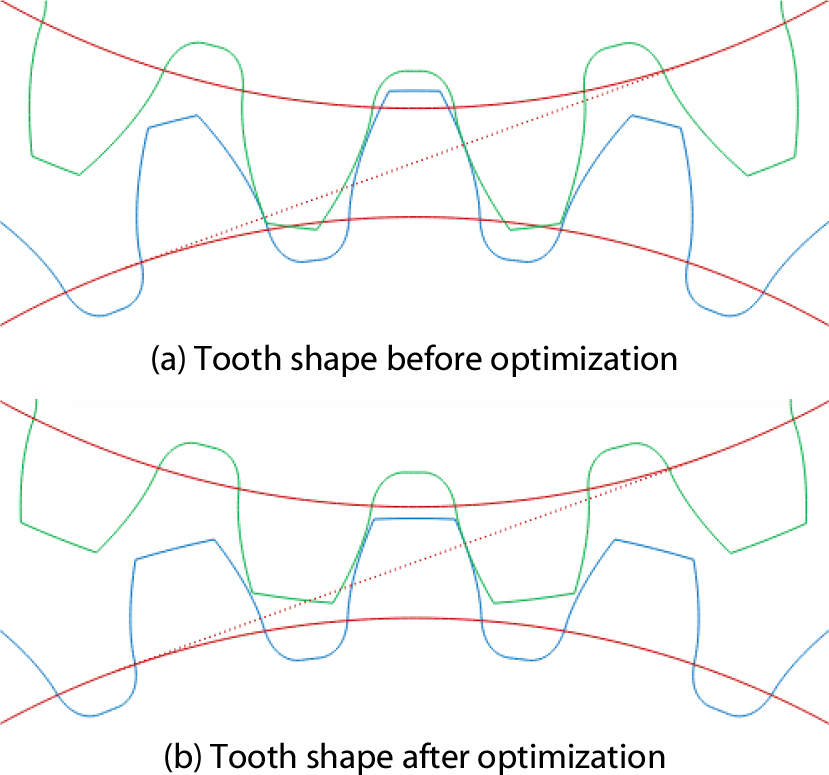
따라서 최적화 전의 PPTE 값은 32.0, 최적화 후의 PPTE 값은 16.3의 결과가 나타났으며, TE 곡선의 개형 변화와 기어 형상의 변화는 각각 Fig. 10, Fig. 11에 나타내었다. 이는 BO가 고비용 FEA 기반 최적화에 적합한 기법임을 입증한다.

5. 결 론
본 연구는 기어의 TE 저감을 목표로 거시 제원 설계 변수를 최적화하는 BO 절차를 제시하였다. 먼저 민감도 해석을 통해 영향도가 큰 변수를 선별한 결과, 어덴덤 팩터 와 디덴덤 팩터 가 TE에 가장 큰 영향을 미치는 것을 확인하였다. 이후 비선형 기어 접촉해석으로 신뢰도 높은 데이터 샘플을 생성했으며, 계산 비용을 낮추면서 정확도를 유지하기 위해 기어 몸체의 강성을 반영하는 개선형 간소화 모델을 도입해 해석 효율을 향상시켰다.
이 기반 위에서 BO를 적용하여 탐색을 수행하였다. 초기 13개 샘플을 출발점으로 GP 대리모델을 학습하고, EI 기준으로 유망한 후보를 선택해 데이터를 확장하는 절차를 반복한 결과 전역 최적점은 = 0.6, = 1.2로 도출되었다. 동일 해석 조건에서 GA를 이용해 결과를 교차 검증한 경우에도 동일 지점으로 수렴하여, 도출된 최적점의 신뢰성을 확인하였다.
GA와 효율성 측면의 비교에서도 BO의 이점이 확인되었다. Function Call을 공통 지표로 사용할 때, BO는 GA 대비 약 156배 적은 평가로 동일한 최적점에 도달하여 약 99.4%의 계산량을 절감했다. FEA 기반 문제가 본질적으로 계산 비용이 큰 점을 감안하면, BO는 정확도를 유지하면서도 시간 자원을 크게 절약할 수 있는 대안임을 보여준다.
따라서 본 연구는 영향도가 큰 설계 변수 와 를 선별하고, 간소화 모델로 정확도와 속도를 동시에 확보한 해석 환경을 마련한 뒤, GP 대리모델과 EI를 사용하는 BO를 적용해 전역 최적점을 탐색하였다. 이어 GA로 교차 검증까지 수행하여 결과의 타당성을 확인하였으며, BO 기법을 이용한 최적화는 향후 최적설계 연구에 크게 기여할 것으로 판단된다.
