

1. 서 론
날갯짓 초소형 비행체는 총 날개 길이 15cm 이하인 무인 비행체이며, 날개의 왕복 운동을 통해 추력을 생성한다. 이 작은 크기로 인해 건물 내부나 숲속 등 기존의 항공기로는 불가능한 임무가 가능할 것으로 여겨진다. 또한, 날갯짓과 클랩-플링(clap-fling) 운동에 의해 낮은 Reynolds number 유동에서 회전익이나 고정익보다 효율적일 것이라는 기대 (Pines et al., 2006)가 있어 날갯짓 초소형 비행체에 대한 많은 연구가 진행되었다. 먼저는 자연의 새와 곤충의 비행에 대한 연구(Alexander, 2002)가 수행되었으며, 각각을 모방한 비행체들이 설계되었다.
곤충을 모방한 비행체는 꼬리 날개없이 날갯짓의 변화만으로 추력 및 자세 제어가 가능해야 하며, 전지를 탑재하고 장시간 운행하기 위해서는 고효율 구동부에 대한 연구가 필수적이다. 이에 따라 많은 연구자들에 의해 다양한 날갯짓 구동 장치들이 설계되었다. Jeon(2017)과 Karasek(2014)는 크랭크와 링크 연동 장치를 이용해 모터의 회전 운동을 날갯짓 운동으로 전환하는 동력 전달 장치를 설계하였다. 이러한 설계는 외력에 강하며, 링크 회전축의 위치를 변화시켜 비행체의 자세 제어를 할 수 있는 조종 장치와 결합되어 전체적인 중량과 부피의 감소를 기대할 수 있다. 하지만 링크 자체의 무게로 인해 중량이 오히려 증가할 수 있으며, 왕복 운동 시 큰 관성력의 영향으로 에너지 효율이 감소할 수 있다.
Nano Hummingbird에는 끈을 이용해 모터의 회전 운동을 날개의 왕복 운동으로 전환하는 동력 전달 장치가 사용되었다 (Keennon et al., 2012). 끈은 일반적으로 링크보다 가벼워 전체적인 중량 및 관성에 의한 동력 손실을 줄일 수 있고, 마찰 또한 적어 동력 장치의 효율을 증가시킬 수 있다. 하지만 장력 으로만 힘을 전달할 수 있는 끈의 특성에 의해 구동 장치의 운동 해석이나 설계에 어려움이 있다. Nano Hummingbird는 독립된 끈 2개가 교대로 잡아 당겨지면서 날개를 회전시키는데, 두 끈 모두 장력이 작용하지 않는 시간이 있어 날갯짓이 외부 환경에 영향을 받을 수 있다.
Phan(2017)은 링크 구조와 끈-도르래 구조를 결합하여 동력 전달 장치를 설계하였다. 모터의 회전 운동은 링크 구조를 통해 회전 왕복 운동으로 전환되며, 끈-도르래 구조를 통해 회전각이 증폭된다. 이 설계를 통해 가볍고 적절한 추력을 내는 비행체가 제작되었다. 링크 구조에 의해 전후 날갯짓의 비대칭이 발생하여 피칭 모멘트가 발생하는데, 이는 뒷전 날개의 회전축을 조절하는 조종 메커니즘에 의해 제어될 수 있었다.
끈을 이용한 동력 전달 장치의 여러 장점들을 활용하고자 본 연구자들에 의해서도 한 가지 끈을 이용한 설계가 제안되었다 (Gong et al., 2016). 모든 끈에 장력이 없는 시간을 최소로 하는 것을 목적으로 하였다. 하지만 끈이나 다른 작은 부품들의 치수를 고려하지 않아 시제품이 동작하지 않는 문제가 이후 계속된 연구에서 발생하였다.
본 연구에서는 이전 연구들에서 상세히 논의되지 않은 날갯짓 구동 장치의 운동학적 최적화가 수행되었으며, 이는 Gong (2016)의 끈을 이용한 날갯짓 구동 장치의 개선에 응용되어 최적화 결과 분석이 이루어졌다. 먼저 마찰 감소와 설계 단순 화를 위해 기본 운동 원리가 변경되었다. 다음에는 패턴 검색 방법을 수정한 운동학적 수치 최적화 방법을 이용해 변경된 설계의 최적화가 진행되었다. 마지막으로 제작된 시제품의 실험 결과와 운동학적 시뮬레이션과의 비교가 수행되었다.
2. 본 론
이 장에서는 끈을 이용한 날갯짓 동력 전달 장치의 설계 변경 사항과 구동 원리를 소개한 후, 끈의 특성을 고려한 설계안의 운동 계산방법을 정리한다. 그리고 수정된 패턴 검색 방법을 이용한 형상 최적화 결과와 시제품의 실험결과를 비교하게 될 것이다.
2.1. 설계 변경 사항
이전 설계의 개념 설계도는 Fig. 1과 같다. 모터는 그림의 원점에 설치되며 팔 OP 를 회전시킨다. 점 P 에는 막대가 있어 팔이 회전하면 두 개의 끈이 교대로 당겨지게 된다. 팔의 위상인 θ 가 90˚, 270˚일 때, 당겨지는 끈이 교대된다. 한 끈은 왼쪽 날개의 점 E 에서 원반과 고정되고 점 S2, S1 , A , P , D , T1, T2 순으로 지난 후, 점 F 에 고정된다. 점 A , B , C , D 에는 점 P 와 같은 막대가 고정되어 있어 끈은 이 둘레를 미끄러지게 된다. 다른 끈은 이와 비슷하게 점 F , E 에 양끝이 고정되고, 점 T1, T2, C , P , B , S2 , S1을 순서대로 지난다. 따라서 한 끈이 당겨지면 그 끈이 고정된 점을 통하여 장력이 전달되고, 날개를 회전시키게 된다. 한편, 두 날개의 위상이 달라질 수 있으므로 원반 위에 기어들을 설치하여 위상을 일치시켰다.
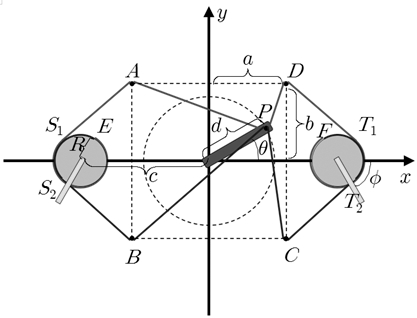
이전 설계에서 점 A , B , C , D 에 설치된 막대에 의해 지배 방정식이 쉽게 식 (1), (2)(Gong et al., 2016)와 같이 정립된다. L 은 실제 끈의 길이이며 l1 , l2는 각각 두 끈이 지나야 하는 경로의 길이를 나타낸다.
식 (1), (2)는 팔의 위상 θ 와 날개의 위상 ϕ이 하나의 같은 항에 존재하지 않아 점 A , B , C , D 내부의 끈 경로의 변화에 따른 날개의 위상 변화가 명확하다. 따라서 목표 날갯짓 폭을 만족시키는 형상을 손쉽게 구할 수 있었다. 하지만 점 A , B , C , D 에 설치된 막대로 인해 무게가 증가하고 끈과의 마찰이 발생하여 시제품이 원활히 구동하지 못하는 현상이 관찰되었다. 이에 따라 그 막대들을 제거하는 방향으로 설계가 변경되었으며, 그 개념도는 Fig. 2와 같다.
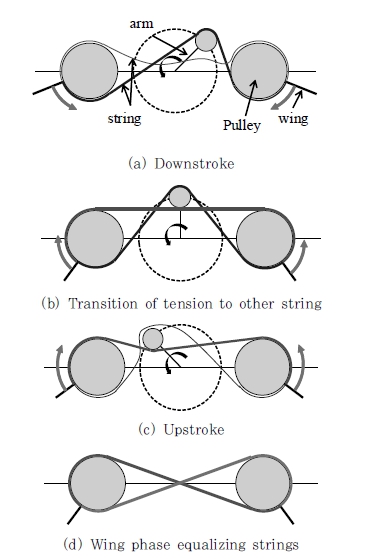
동작 원리는 이전과 유사하다. Fig. 2(a)와 같이 모터가 팔을 돌리면, 팔 끝에 회전 결합된 원반이 두 끈 중 하나를 당기게 된다. 그리고 Fig. 2(b)에서 팔이 다른 끈을 당기기 시작하며, Fig. 2(c)와 같이 날개가 반대 방향으로 회전하게 된다.
이전 설계에서는 날갯짓 위상들을 일치시키기 위해 기어를 구입하였는데, 이는 두 날개 회전축간의 거리를 자유롭게 변경할 수 없는 단점이 있었다. 따라서 이번 설계에서는 Fig. 2(d)에 그려진 것처럼 다른 한 쌍의 끈을 8자로 연결하여 두 날개의 위상을 일치시켰다. 이 끈들과 다른 구동 부품과의 간섭을 방지하기 위해 원반의 다른 높이에 설치되었다.
2.2. 운동 계산 알고리즘
현 설계안에서는 이전 설계안과 같이 팔의 위상 θ 와 날개의 위상 ϕ가 분리되어 있지 않아 예상 날갯짓 폭을 쉽게 계산할 수 없다. 또한 이전에는 고려되지 않았던 끈과 막대의 두께에 의해 두 끈에 모두 장력이 발생하는 순간이 존재하여 모터에 큰 하중이 작용하는 현상이 발견되었다. 이러한 값들이 수식에 포함되면서 해석이 더욱 어려워졌다. 따라서 형상 최적화나 시뮬레이션에 사용될 새로운 운동 계산 알고리즘이 필요하다. 간단한 계산을 위해 끈은 늘어나지 않으며, 두 날개의 위상은 동일하다고 가정하여 추가된 한 쌍의 끈의 효과를 적용하였다.
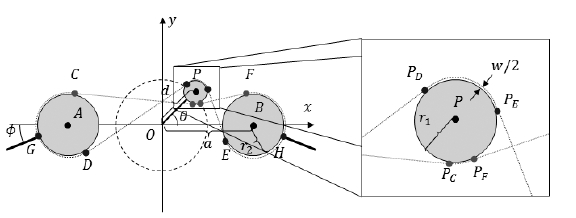
우선 끈을 이용한 동력 장치의 구조를 수학적으로 표현한 Fig. 3에서 끈이 지나는 경로의 길이는 식 (3), (4)로 표현 가능하다. 여기에서 끈의 두께는 w로 고려되었으며, 끈의 지나는 점이 벽면에서 w/2 만큼 떨어져 있음을 가정하였다. 식에서 점 G , H 는 두 끈의 양 끝이 매듭 묶이는 곳이며, 다른 점들은 끈의 경로와 원반과의 접점을 의미한다.
두 끈의 총 경로의 길이는 식 (3), (4)의 합으로 구하며, 오직 θ 에 대한 함수가 된다. 실제 끈의 길이 L 은 두 끈의 총 경로의 길이의 최댓값을 반으로 나누어 구하는데, 만약 두 끈의 길이가 이보다 작게 설정되면 특정 θ 구간에서 두 끈 모두 장력이 걸리는 현상이 발생한다.
두 끈 중 어느 끈에 장력이 작용하는지를 구분해 주는 인장 함수 T 와 그에 따른 구동 방정식은 식 (5), (6)으로 정리된다. 끈이 지나야 하는 경로의 길이 l1, l2 중 하나가 실제 끈의 길이 L 보다 길어지게 되면 끈이 당겨지게 되며, 인장 함수 T 는 1, -1을 출력하여 두 끈 중 어느 끈에 장력이 작용하는지 나타낸다. 인장 함수 T 의 값에 따라 식 (6)에서 하나의 식이 결정되고, θ 에 따른 날개의 위상 ϕ가 얻어지게 된다.
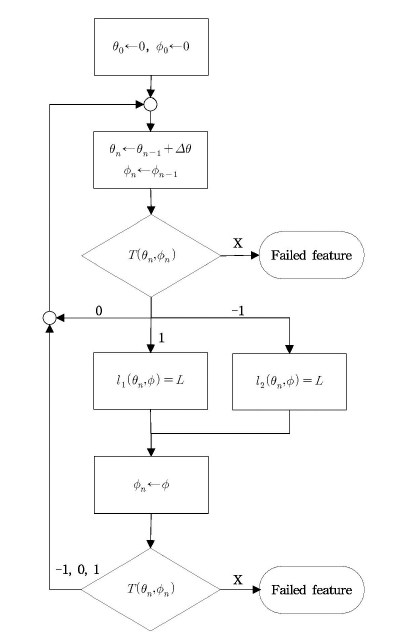
Fig. 4는 끈을 이용한 날갯짓 구동장치의 수치적인 운동 시뮬레이션을 위한 알고리즘을 보여준다. 팔의 위상 θn은 일정한 Δθ 만큼 증가하고, 날개의 위상 ϕn는 이전 순간의 값을 유지한다. 이 θn , ϕn으로 식 (5)의 인장 함수 T 를 계산하여 어느 끈이 당겨지는지 파악한다. 이때, 두 끈이 모두 당겨지면 T 는 아무 값도 출력하지 않도록 하였으며, 구동이 불가능한 형상임을 나타낸다. 0이 출력되면 두 끈 길이에 여유가 있으므로 팔은 자유롭게 움직인다. 1이나 -1이 출력되면 식 (6)으로 새로운 ϕ가 계산되고 다시 인장 함수 T 에서 구동 불가능한 형상은 아닌지 검토한다. Fig. 4의 알고리즘을 이용한 코드를 MATLAB에서 작성하여 운동학적 수치 시뮬레이션과 최적화 과정에 활용하였다.
2.3. 수정된 패턴 검색 방법을 이용한 형상 최적화
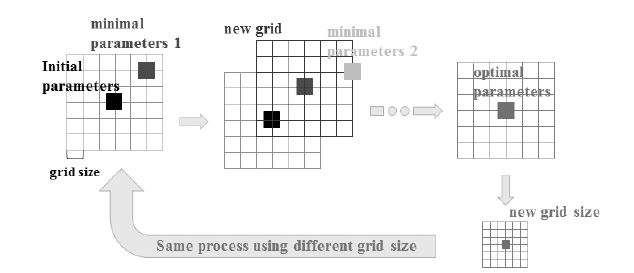
Hooke(1961)은 목적 함수의 구배(gradient)를 계산하지 않는 직접 검색(direct search) 최적화 방법 중 하나로 패턴 검색(pattern search) 방법을 제안하였다. 구체적인 방법은 다음과 같다. 초기 변수 벡터와 그 벡터의 각 변수만 일정량 증감시킨 도메인을 설정하고 그 도메인 중 최저 혹은 최대가 되는 변수 벡터를 다시 초기 변수 벡터로 설정한다. 초기 변수 벡터가 해당 도메인 중 최저가 될 때까지 이 과정을 반복하며, 더 정확한 결과를 위해서 변수의 변화량을 반으로 하여 반복할 수 있다. 이 방법은 함수의 미분을 계산하지 않아 계산이 빠른 장점이 있지만, 전체의 최적점이 아닌 국부적 최적점에 수렴할 수 있다.
본 연구에서는 패턴 검색 방법을 수정하여 국부 최적점에 수렴하는 가능성을 줄일 수 있도록 하였다. 이전의 패턴 검색 방법은 각 변수를 +-방향으로 한 번씩 검색하는데, 이를 확장 하여 임의로 변수의 증감 횟수를 정하여 격자를 생성하고 이 영역 안에서 검색이 수행 가능하도록 하였다. 비록 계산양은 증가할 수 있지만 좀 더 넓은 영역에서 검색하여 수렴 속도가 빨라질 수 있으며 국부 최적점에 수렴하는 영역을 넘어갈 수 있게 되었다.
Fig. 5는 2개 변수 문제에서의 수정된 패턴 검색 방법 예시 이다. 초기 변수 벡터를 기준으로 하여 각 변수를 +-방향으로 3번까지 변화시켜 격자를 생성한다. 이 격자내의 최적의 값을 나타내는 변수 벡터를 기준으로 이 과정을 반복한다. 초기 변수 벡터와 최적의 변수 벡터가 동일할 때, 격자의 크기를 반으로 하여 원하는 정확도의 결과를 얻을 때까지 위 과정을 반복한다.
이 수정된 패턴 검색 방법을 활용하기 위해 먼저 Fig. 3에서 설계 변수들을 설정하였다. a는 날갯짓 구동 장치의 전체적인 크기를 결정하므로 본 연구에서는 임의로 12.5mm로 정하였다. 남은 변수 d, r1 , r2로 구성된 변수 벡터 X 에 대하여 최적화가 수행될 수 있도록 하였다.
다음은 목적 함수를 설정하였다. 목표 날갯짓 폭과의 차이, 전후 날갯짓의 대칭성, 두 끈의 장력이 동시에 존재하지 않는 구간의 최소화 등이 본 날갯짓 구동장치의 중요한 해결과제라고 생각되었다. 하지만 두 끈의 길이가 동일하면 전후 날갯짓의 대칭성이 확보되고, 팔의 위상 θ 가 90˚, 270˚일 때 두 끈의 경로의 길이가 최대이기 때문에 끈의 길이만 적절히 조절하여 제작하면 두 끈의 장력이 없는 시간을 최소화할 수 있다. 따라서 목표 날갯짓 폭과의 차이만 고려하여 최적화를 시도할 수 있지만 조건이 적어 최적해가 무수히 많을 것으로 예상되어 한 가지 조건을 추가하였다. 두 끈의 총 경로의 길이가 작게 변하면 낚싯줄 같이 잘 굽어지지 않는 끈이 사용되었을 때 두 끈에 모두 장력이 작용하는 구간이 길어질 수 있다. 그 변화폭을 일정량 이상 만족시킬 수 있도록 목적함수는 식 (8)과 같이 결정되었다. Φobj는 목표 날갯짓 폭이며 서론에서 언급된 이전 연구들을 참고하여 160˚로 설정하였다. Φ(X) 는 주어진 설계 변수에서의 날갯짓 폭이며, 시뮬레이션으로 계산된 ϕ(θ ) 의 최댓값과 최솟값의 차이로 계산된다. Δlobj는 목표로 하는 끈의 총 경로 길이의 변화량이며, 7mm로 설정되었다. Δl 은 θ 가 0˚, 90˚일 때의 l1 + l2의 값의 차로 구할 수 있다.
변수의 변화량인 격자 크기는 1mm부터 시작하여 0.01563 mm까지 절반씩 총 6번 변화시켰다. 초기 변수 벡터 X0는 Table 1과 같이 구동 가능한 형상으로 설정하였다.
Table 1
Initial and optimized parameters
| Parameters | d(mm) | r1(mm) | r2(mm) |
|---|---|---|---|
| Initial | 5 | 0.5 | 4.25 |
| 1st optimization | 5 | 1.5 | 4.25 |
| 2nd optimization | 5 | 1.5 | 3.75 |
| Optimized | 5.53 | 1.53 | 3.76 |
날갯짓 동력 전달 장치의 최적화 결과는 Table 1과 Fig. 6, 7을 통해 분석되었다. Table 1에서 r1, r2가 급격히 변한 것을 볼 수 있는데, 이는 최적화된 값으로의 수렴범위가 상당히 넓다는 것을 의미한다. 따라서 최적화된 결과가 국부적 최적점이 아닌 전체적 최적점일 확률이 높지만 다양한 초기 설계 변수에 대한 최적화가 필요할 것이다.
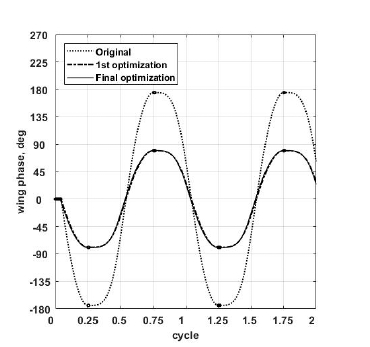
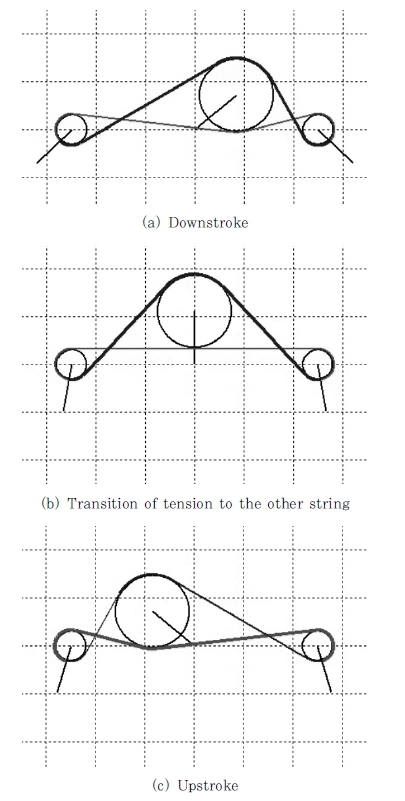
Fig. 6, 7은 최적화된 설계에 대한 2.2에서 언급된 운동학적 수치 시뮬레이션 결과이다. 최적화 초기 형상과 1단계 및 7단계 최적화된 형상의 날갯짓 운동을 비교하기 위하여, 각 형상에 대한 팔의 회전에 따른 날개 위상 변화를 Fig. 6에 나타내었다. 두 끈 모두 당겨지지 않으면 굵게 표시되도록 하였다. 본 설계의 특성인 전후 날갯짓의 대칭성이 기본적으로 확보됨을 볼 수 있다. 1단계 최적화부터 목표 함수에 적용된 날갯짓 폭 160˚가 만족 되었으며, 굵게 표시된 부분이 극히 일부분이므로 두 끈에 모두 장력이 없는 구간이 최소화되었다고 판단될 수 있다.
마지막으로 Fig. 7은 최적화된 설계를 이용하여 수치적 시뮬 레이션의 일부를 보여준다. 각 끈이 당겨질 때 굵게 표시되도록 하였다. 두 끈이 교대로 당겨지며, Fig. 2에서 예상한 구동 원리와 동일하게 구동하는 것을 관찰할 수 있다.
2.4. 시제품 제작 및 실험
2.3의 최적화 과정은 동역학적인 고려 없는 운동학적인 해석을 이용하였으므로 시제품을 제작하고 실험하여 본 날갯짓 구동 장치의 활용 가능성을 검증해 볼 필요가 있었다.
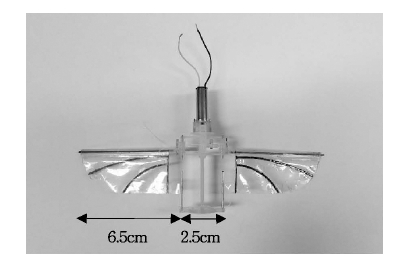
Fig. 8은 제작된 시제품을 나타낸다. 지름 8mm coreless 모터가 사용되었으며, 세 개의 기어를 이용하여 회전속도를 20.6배 감속하였다. 모터와 기어는 구매품이며 구조물은 CNC 로 가공되었다. 금속 막대 또한 가공되어 조립되었으며, 끈의 재질로는 0.25mm 낚싯줄이 사용되었다. 날개는 15 micron mylar, 탄소 막대와 탄소판을 가공하여 제작되었으며, 일반 적인 형상이 적용되었다. 총 날개 길이는 16cm 정도이며 총 중량은 9.5g으로 측정되었다.
먼저 제작된 시제품을 날개없이 가동하여 구동 장치에 대한 날개의 영향을 파악하고자 하였다. Fig. 9(a), (b)는 날개 앞의 탄소봉만 끼운 상태에서 1V로 가동한 모습이다. 160˚의 날갯짓을 하며, 전후 대칭적인 움직임을 보였다. 이 상태에서 1.5V로 가동하였을 때, 날갯짓 폭이 증가하여 두 날개가 부딪 히기도 하였다. 끈을 묶을 때 제작 오차가 발생하여 필요한 끈의 길이보다 실제 끈의 길이가 길어졌다면 이러한 현상이 가능할 것이라고 생각된다. 탄소 막대의 변형과 기타 얇은 부 품들의 진동과 변형 또한 날갯짓 폭의 변화를 줄 수 있다 (Karasek, 2014). 끈의 길이를 제작 후에도 쉽게 조절할 수 있는 Nano Hummingbird(Keennon et al.. 2012)의 경우 이러한 날갯짓 폭의 변화를 잘 제어할 수 있었던 것으로 예상 된다.
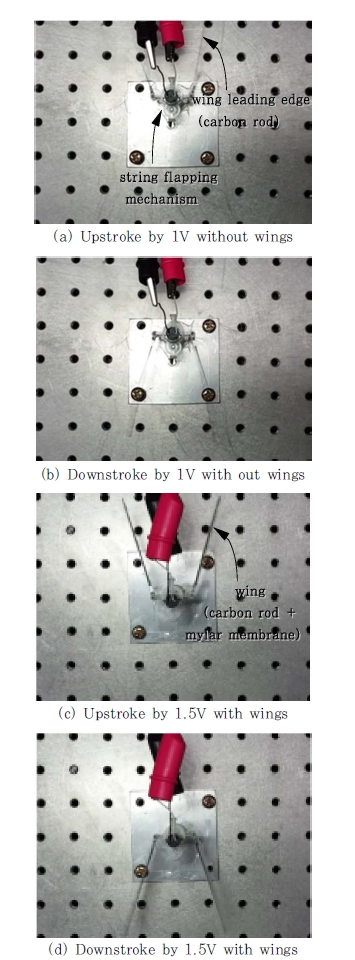
날개를 단 후 1.5V에서 가동한 결과는 Fig. 9(c), (d)에 제시되었다. 이 실험에서는 날개의 공기 저항에 의해 날갯짓이 증폭되는 현상없이 160˚의 날갯짓을 관찰할 수 있었고, 이전 보다 날갯짓 속도가 줄어든 것을 확인할 수 있었다.
이 실험으로 인해 앞서 설계된 끈을 이용한 날갯짓 구동 장치가 실제로 날갯짓을 구현하는데 문제가 없으며, 원하는 날갯짓 폭을 갖는 형상을 최적화 과정을 통해 얻을 수 있음을 검증할 수 있었다.
3. 결 론
본 연구에서는 곤충 모방 날갯짓 초소형 비행체의 끈을 이용한 동력 전달 장치의 설계가 제시되었으며, 수정된 패턴 검색방법을 통해 날갯짓 운동을 최적화할 수 있었다. 또한 시제품 제작과 실험을 통해 활용가능성을 검증하였다.
제안된 설계의 운동방정식에서 두 끈 모두 장력이 작용하지 않는 시간이 없음을 알 수 있으며, 이는 링크 메커니즘과 같이 날갯짓을 지속적으로 구속할 수 있음을 의미한다. 수치적인 최적화 기법을 통해 실험적인 형상 최적화에 비해서 시간과 자원의 소모를 줄일 수 있었다. 실험에서는 설계된 구동 원리와 최적화 과정의 유효성을 검증할 수 있었으며, 추후 설계 개선을 통해 실제 비행체에 적용될 수 있는 가능성을 확인할 수 있었다.
이 논문에서 제시된 날갯짓 구동 장치의 해석에는 동역학적인 해석이 결여되어 있었으므로 이를 고려한 최적화가 진행될 계획이다. 운동학적인 최적화 과정에서는 모터의 회전 속도가 일정하다고 가정되었지만 날개에 가해지는 공기역학적 저항과 부품의 움직임에 의한 관성력이 모터에 하중으로서 가해지면 모터의 회전 속도가 변하게 될 것이다.
실험적인 최적화 검증 측면에서는 초고속 카메라 촬영을 통해 날갯짓 폭과 날갯짓 속도의 정확한 측정이 가능하며, 로드셀 측정으로 추력 발생과 기계적 진동 등을 확인할 수 있을 것으로 예상된다.
