

1. Introduction
The subject of this paper is topology optimization of a buckling problem. A topology optimization method helps designers find a suitable material layout for the required performances. Bendsoe and Kikuchi’s(1988) homogenization based approach was introduced for the topology optimization, and many linear material behaviors and geometrically nonlinear topology optimization methods have been developed (Jung and Cho, 2003). Since the topology optimization necessarily involves many design variables, the design sensitivity analysis(DSA) of performance measure with respect to the design variables should be determined in a very efficient way. A continuum based DSA approach, which can handle several types of design variables, was developed(Haug et al., 2003). In this paper, a continuum method for the non-shape problems like material property is considered. We develop an efficient DSA method for both the maximization of critical load and minimization of compliance.
Buckling may occur as a structural response when the in-plane directional membrane force is applied to the structures. The motion of interest occurs out-of-plane direction because the out-of- plane directional buckling motion occurs faster than the in-plane directional buckling motion. The prestress to be added to the structural forces is one of the forces in the plate. An initial stress matrix is added to the original matrix equation of the structure and consists the buckling equation(Cook et al., 1989). We apply the von Karman strain-displacement relation(Irving et al., 1985) to the original equation to derive the plate buckling equation. The plate buckling topology optimization problems are formulated using the derived plate buckling equation. Finally, the plate buckling topology design optimization problem is performed in several cases.
2. Plate Buckling Problems
The plate buckling governing equation is derived using the von Karman strain- displacement relation and kirchoff plate theory. Next, we can obtain the plate buckling equation as the following:
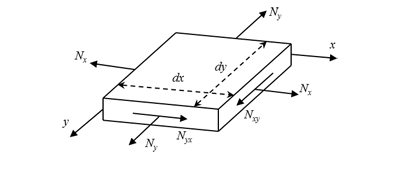
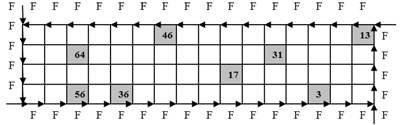
where and w is the bending deflection. Nx, Ny, Nxy are the forces in the x, y, xy direction measured per unit length shown in Fig. 1 respectively.
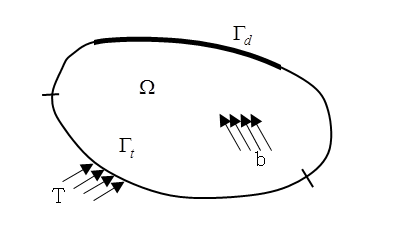
Consider a simple built-up structure with domain Ω shown in Fig. 2. The boundary of Ω is composed of Γd where the displacement is prescribed and Γt where traction t is the prescribed boundary.
The weak formulation of the fourth order differential Eq. (1) can be obtained by multiplying the virtual bending deflection  with it, and integrating the equation over the domain Ω. We obtain Eq. (2) through the integration by part
with it, and integrating the equation over the domain Ω. We obtain Eq. (2) through the integration by part
where D is the flexural rigidity and λ is the Critical load factor. Mω represents the bending moment, and Nω represents the transverse shear force. The space of kinematically admissible field is defined as a set of displacement field. The space W for the trial solution is defined as
Also, space  for the virtual displacement field is defined as
for the virtual displacement field is defined as
where r is the number of elements within the built up structure and  is the essential boundary where the displacement is prescribed. By definition, Eq. (4) satisfies for every
is the essential boundary where the displacement is prescribed. By definition, Eq. (4) satisfies for every 

 that belongs to the space of kinematically admissible fields. Due to the above boundary conditions, boundary integrals of Eq. (2) vanish, and variational equation Eq. (2) can be rewritten using bilinear forms as
that belongs to the space of kinematically admissible fields. Due to the above boundary conditions, boundary integrals of Eq. (2) vanish, and variational equation Eq. (2) can be rewritten using bilinear forms as
The bilinear forms are represented as
and
3. Design Sensitivity Analysis of Plate Buckling Problems
Eigenvalue problems for buckling of elastic systems are described by a variational equation form
where satisfies the homogeneous boundary condition and belongs to the space of kinematically admissible displacements. The bilinear form  on the right side of Eq. (8) represents geometric effects in buckling problems. A variation of Eq. (8) about the design variable to calculate the design sensitivity is written as
on the right side of Eq. (8) represents geometric effects in buckling problems. A variation of Eq. (8) about the design variable to calculate the design sensitivity is written as
where is involved in the variational space, so can be written as w. Then, we obtain
Design sensitivity of critical buckling load factor λ is written as
Since virtual displacement is involved in variational space, Eq. (11) is rewritten as
4. Formulation of Topology Design Optimization
The objective of the topology optimization method is to find an optimal material distribution that minimizes objective functions and is subject to constraints. The material distribution can be represented using a normalized bulk material density function ρ that has a continuous variation from zero to one, taking the value of one for solid material and zero for void. Bulk material density of each element is associated with Young’s modulus and is written as
where E0, is the Young’s modulus of the original material.p is a penalty parameter used to enforce a concentrated distribution of material.
4.1 Topology Optimization of Compliance
A topology design optimization without the critical buckling load problem is stated as
where C is the compliance, f is the body force intensity,T is the traction, d is the Displacement field, Ω is the structural domain, V0 is the allowance material volume and ρ is the bulk material density. The sensitivity of design variable for the finite element method is obtained by the variation of Eq. (16) which is written as
The total volume of structure is calculated by design variable ρi. The constraint is expressed as
where g is the constraint, ρi is the material density and Vi is the volume. We use the Modified Method of Feasible Direction(MMFD) to find the optimal design and MMFD is based on the gradient for the design variables. We need the sensitivity of objective function and the sensitivity of constraint. The sensitivity of constraint is obtained by
4.2 Topology Optimization for Buckling
We formulate the topology optimization considering the critical buckling load. If the compliance is considered only in optimization problem, only the stiffness of the structure can be hardened. Eq. (21) can be obtained by dividing Eq. (16) by the critical buckling load term.
Objective function  can express both objectives that minimize the compliance and maximize the critical buckling load. We use the allowance material volume as the constraint. The design sensitivity of objective function is written as
can express both objectives that minimize the compliance and maximize the critical buckling load. We use the allowance material volume as the constraint. The design sensitivity of objective function is written as
Using the sensitivities, critical buckling load factor, and compliance, Eq. (22) can be computed.
5. Numerical Examples
5.1 DSA Verification
The purpose of this example is to verify the DSA method for the critical buckling load. We have two results in this numerical example of DSA. The first example is to verify the DSA of the critical buckling load with respect to Young’s modulus and the second example is to verify the DSA of critical buckling load with respect to thickness. The DSA method for the critical buckling load is verified and the buckling mode is made by the axial load and the shear direction load respectively. We use the Kirchhoff plate element to analyze the structure model and use the prestress to calculate the out-of-plane buckling load factor through the plane analysis. We obtain the DSA for critical buckling load applied to these two different type loads, the axial compress force and the shear force.
5.1.1 DSA of Critical Buckling under Axial Compression Force
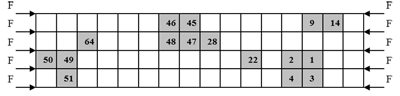
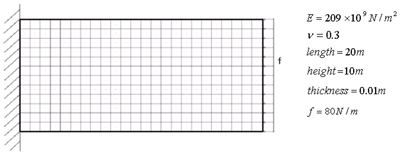
Consider a square plate whose aspect ratio is 4 under the distribute loading condition as shown in Fig. 3. The rectangular plate is discretized by 16×4 elements. The rectangular plate has a height of 40m, widthof 10m and a plate thickness of 0.01m. A distributive axial compress loading F=1N/m is applied along the right and left sides. Young’s modulus is 209×109(N/m2). Poison’s ratio is ν=0.3. Design variables are relative density and thickness for each element. Performance measure is the critical buckling load.
The analytical design sensitivity of the critical buckling load factor with respect to Young’s modulus is compared with the finite difference sensitivity. In Table 1, design sensitivity of the critical buckling load factor in each nodes with respect to Young’s modulus of each element is compared. We compare the results of analytical sensitivity denoted as dλ/dρi with an identical result denoted as ∆λ/∆ρi. We compare the exact solution with numerical solution for critical buckling load. They show good agreement shown in Table 2.
Table 1
Comparison of critical buckling load
| Exact solution | Numerical solution | Accuracy(%) | |
|---|---|---|---|
| Critical buckling load | 7.55584E+03 | 7.5452E+03 | 99.856 |
Table 2
Comparison of design sensitivity


We use the same way to verify the sizing sensitivity analysis results. The analytical design sensitivity of the critical buckling load with respect to thickness is compared with the finite difference sensitivity. In Table 3, the critical buckling load factor design sensitivity of each node with respect to thickness of each element is compared. We compare the results of analytical sensitivity and the identical result. They show excellent agreement shown in Table 3.Design Variable
Table 3
Comparison of design sensitivity
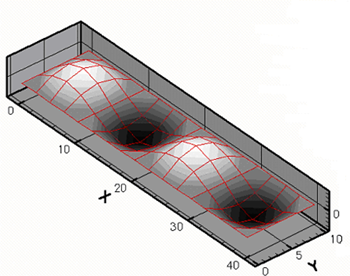
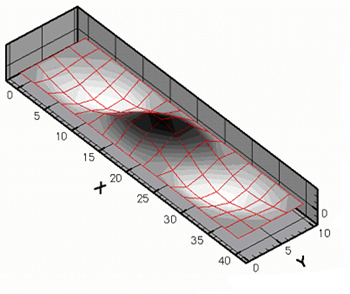
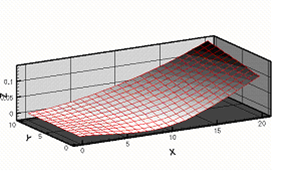
When the axial distributive compression force is applied on the plate, the plate is deformed in the out-of-plane direction. The buckling mode shape in the out-of-plane direction is shown in Fig. 4.
5.1.2 DSA of the Critical Buckling Applied the Shear Force
Consider the same model shown in Fig. 5. The rectangular plate is discretized by 16×4 elements. The rectangular plate has a height of 40m, width of 10m and plate thickness of 0.01m. A distributive shear loading, F=1N/m is applied along the edges. Design variables are the relative density for each element. Performance measure is the critical buckling load.
The analytical design sensitivity of the critical buckling load factor with respect to the relative density for each element is compared with the finite difference sensitivity. In Table 4,
Table 4
Comparison of the critical buckling load under shear force
| Exact solution | Numerical solution | Accuracy(%) | |
|---|---|---|---|
| Critical buckling load | 1.055E+04 | 1.078E+04 | 102.2243 |
design sensitivity of the critical buckling load factor in each nodes with respect to Young’s modulus of each element is compared. We compare the results of analytical sensitivity with an identical result. We compare the exact solution with numerical solution for critical buckling load. They show excellent agreement shown in Table 5.
Table 5
Comparison of design sensitivity for young’s modulus
We use the same way to verify the sizing sensitivity analysis result. The analytical design sensitivity of the critical buckling load with respect to thickness is compared with the finite difference sensitivity. In Table 3, the critical buckling load factor design sensitivity of each node with respect to thickness of each element is compared. We compare the results of the analytical sensitivity and an identical result. They show excellent agreement shown in Table 6.
Table 6
Comparison of design sensitivity of thickness
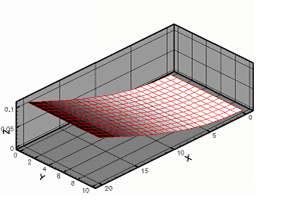
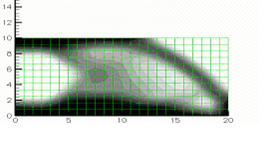
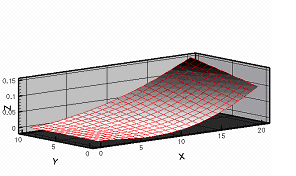
When the shear distributive force is appliedto the plate, the plate is deformed in the out-of-plane direction. The buckling mode shape in the out-of- plane direction is shown in Fig. 6.
5.2 Topology Optimization
5.2.1 Topology optimization Applied the Axial Compression Force
The cantilever model subjected to a distributive axial compression is shown in Fig. 7. The optimization result without considering the critical buckling load is also shown in Fig. 8 and the buckling mode shape is shown in Fig. 9. The critical buckling load factor is the value to multiply to the initial loading. In this example the critical buckling load factor is 0.392977.

The topology optimization results considering the critical buckling load is shown in Fig. 10 and the buckling mode shape is shown in Fig. 11. In this case, the critical buckling load factor is 0.534326. The critical buckling load factor increased 36% than the previous result. We can modify the layout performance of the critical buckling load.
5.2.2 Topology optimization under shear force
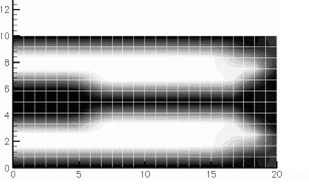
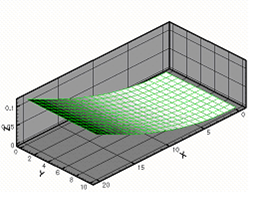
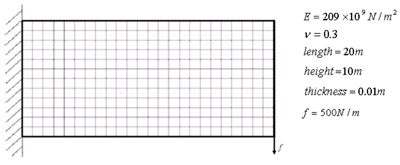
The cantilever model subjected to a distributed shear force is shown in Fig. 12. The final material distribution after the topology optimization result except for considering the critical buckling load is also shown in Fig. 13 and the buckling mode shape is shown in Fig. 14. The critical buckling load factor is 2.401125.
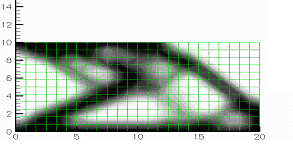
The topology optimization results considering the critical buckling load is shown in Fig. 15 and the buckling mode shape is shown in Fig. 16. The critical buckling load factor is 2.727772 in this case. The critical buckling load factor increased 14% than the previous result. We can modify the layout performance of the critical buckling load.
6. Conclusion
We derive the plate buckling equation including the out-of-plane direction buckling motion. Based on this equation, we derive a weak formulation for plate buckling problems and a continuum-based DSA method using a direct differentiation for eigenvalue design sensitivity approach in continuum form. Also, a topology design optimization method for plate buckling problems using the Kirchhoff plate theory is developed using the direct DSA method. For the topology optimization, the displacement of the buckling motion is calculated. The design variables are parameterized using bulk material densities.
Through several numerical examples, we verify the accuracy of the analytical DSA method by comparing the finite difference sensitivity. The analytical DSA method yields very accurate sensitivity results compared with those of the central finite difference method. Also the topology optimization yields physically meaningful results. It could result in different optimal shapes depending on the critical buckling load and force applied. The topology optimization results considering the critical buckling load factor significantly increase the critical buckling load factor.
