

1. 서 론
화재, 지진 등 재해 발생 후 사회기반 구조물의 구조부재 상태를 정확히 파악하는 것은 보수, 보강은 물론 구조물 사용성과 추가붕괴 가능성을 진단하는데 있어 매우 중요하다. 특히 건설 구조물의 화재 사고 시 보의 처짐과 기둥의 좌굴 등 동적 변형이 급격히 일어날 수 있어 종국에는 구조물의 붕괴로 연결될 가능성이 크다(Duron et al., 2005; Quintiere et al., 2002; Agarwal and Varma, 2014).
구조부재의 동적거동을 계측하는데 가장 많이 활용되는 것은 가속도계로, 계측된 가속도 데이터를 이중적분하고 신호처리를 거쳐 의사변위를 획득한다. 이 때 가속도계 데이터에 내재된 편이(bias)와 오차 탓에 정확한 변위를 구하기가 거의 불가능 하여 결과의 신뢰도가 떨어진다(Kim et al., 2014; Han, 2010). 그럼에도 가속도계의 샘플 주파수가 매우 높고 DC 수준의 신호도 직접 계측이 가능하다는 장점때문에 여전히 건설 구조물의 건전성 모니터링에 적극 활용되고 있으며, 특히 건설 인프라 구조물에서는 DC 성분 계측성능이 우수한 forcefeedback형 가속도계가 많이 활용되고 있다(Kwon et al., 2016).
가속도계를 통한 의사변위 추정기법의 단점을 보완하기 위해, 가속도계와 변위센서를 융합하여 정밀도와 신뢰도를 대폭 향상 시키는 방법이 제안되었다. 데이터 융합 기법 가운데, 칼만 필터는 다양한 센서의 서로 다른 데이터를 활용해 변위를 산정 하는 데 많이 활용되고 있다(Smyth and Wu, 2007; Kim et al., 2014). 칼만필터를 활용한 변위산정기법은 가속도 데이 터의 이중적분을 수행하는 시간 업데이트 단계와 변위 계측 데이터로 편이 누적된 이중적분을 보정하는 계측치 보정단계로 이뤄진다(Simon, 2006; Grewal, 2011).
그러나 칼만필터에 기반한 변위산정기법의 단점은, 건설 구조물 상시 모니터링에 활용할 수 있는 변위센서의 성능이 일반적으로 낮다는 것이다. 일례로 현재 건설 구조물에서 가장 많이 활용되고 있는 GPS-RTK는 샘플 주파수가 최대 20Hz 수준으로 낮고, 가격이 5천만원 이상으로 높으며, 정밀도가 1~5cm 수준으로 낮다는 단점이 있다.
또 변위계측은 그 물리적 특성상 특정한 고정점을 기준으로 계측지점의 위치 변화를 파악하는 것이므로, 변위센서를 사용 하는 경우 센서를 거치할 고정된 지면이 반드시 필요하다. 더욱이 LVDT(linear variable differential transsformer)나 레이저변위계(laser triangulation sensor)는계측지점표면에 가깝게 위치시켜야 하므로 센서 설치를 위해 비계 구조물이 요구 되는 경우가 많다. 장거리에서 계측지점을 겨냥할 수 있는 LDV(laser Doppler vibrometer), LiDAR(light detection and ranging) 등 비접촉식 센서 역시, 계측 위치 근처 지면에 고정 설치해야 하나, 해상 장대교량, 고층빌딩의 경우 설치 위치를 선정하기가 매우 까다로워 건설 구조물의 상시 계측에 적용하기 힘들다. 이러한 이유로 현재 건설 구조물의 변위계측은 GPS-RTK에 의존하고 있는 실정이다.
본 논문에서는 가속도계와 지오폰 센서에서 계측한 가속도 및 속도 데이터를 융합하여 건설 구조물의 단기(short-term) 동적 변위를 계측하는 기법을 제안한다. 제안기법은 부착식 센서인 가속도계와 지오폰을 활용하므로 LDV 등 비접촉식 센서처럼 설치 위치에 제약을 받지 않으며, 변위센서보다 상대적 으로 성능이 좋은 센서를 적용하므로 더 향상된 산정 정확도를 기대할 수 있다. 데이터 융합에 사용된 센서를 모두 부착식으로 도입함으로써, 기존에는 불가능했던 지진, 화재시 구조물 변위 계측이 가능해지는 장점이 있다.
2. 칼만필터 기반 데이터 융합 기법
구조 부재의 변위를 산정하기 위해서는 해당 부재의연속적인 거동을 이산적인 거동으로 표현해야 하며, 이때 상태변수는 각 자유도의 물리량으로 결정된다. 제안 기법은 이 상태변수들을 벡터형식으로 정의한 상태벡터와 구조 부재의 거동을 표현하는 상태공간모델을 기반으로 데이터를 융합하게 된다.
2.1. 상태공간모델의 구현
데이터 융합을 위한 상태공간모델의 구축을 위한 우선적인 가정은, 가속도계와 속도계 계측 데이터에 포함된 신호 성분을 정의하는 것이다. 제안기법에서는 가속도, 속도 데이터가 식 (1), (2)와 같이 각각 참값, 잡음 성분과 편이 성분을 포함 하고 있다고 가정한다.
여기서, (k)와 (k)는 가속도계와 속도계에서 계측한 가속도, 속도 계측치이고, (k), (k)는 가속도, 속도의 참값이며, w (k)와 υ(k)는 각각 가속도, 속도 데이터에 포함된 영평균 백색잡음, b1 (k), b2 (k)는 가속도, 속도 데이터의 편이 성분이다.
두 편의성분 b1 (k), b2 (k) 가운데 b1 (k)이 이중적분으로 의해 누적량이 크므로, 상태벡터 x(k)는 식 (3)과 같이 정의 한다.
영차유지(zero-order hold)를 가정하고 식 (1)을 이중 적분하면 다음과 같은 시스템 방정식을 얻는다.
여기서,
식 (2)의 속도 계측치는 식 (5)와 같이 상태벡터로 표현되어 관측 방정식을 이룬다.
여기서,
2.2. 칼만필터 기반 데이터 융합 기법
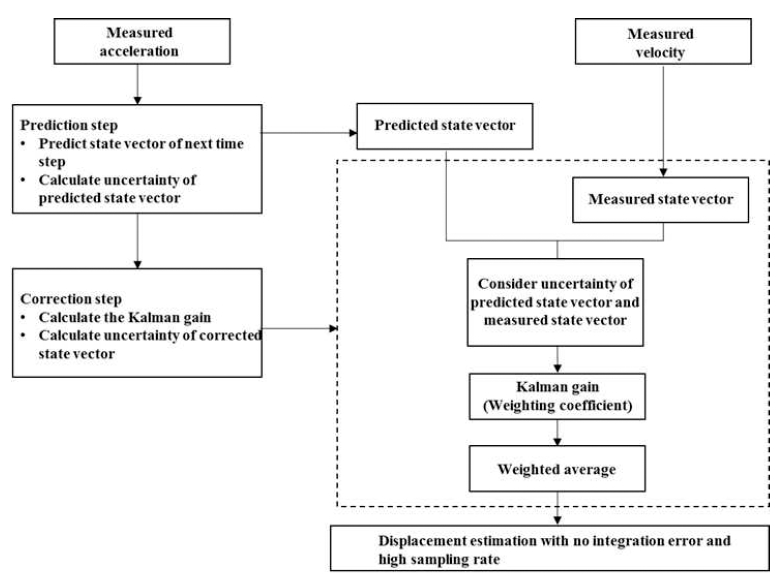
데이터 융합기법은 크게 두 단계로 구분된다. Fig. 1은 제안된 칼만필터 기반 데이터 융합기법의 개략도이다. 1단계는 가속도 계측치 (k)와 이전 시간단계에서 산정한 상태벡터 x k)를 이용해 다음 시간단계에서의 상태벡터 x(k + 1)를 예측하는 단계다. 이 때 변위, 속도, 가속도의 초기값은 계측 시작 시점에서 구조물이 정지해 있다는 가정 하에 모두 0을 취한다. 식 (4)에 기댓값을 취하면 영평균 백색잡음의 기댓값 [w (k)] =0이 되므로, 1단계에서의 x(k + 1)의 추정치 x (k + 1)는 식 (6)으로 표현된다.
그리고 1단계에서의 오차 공분산은 다음과 같이 계산된다.(7)
여기서, e- (k)는 x(k)의 참값에 대한 추정치의 오차이고, 는 잡음성분 w (k)의 분산이다. 칼만필터에서 공분산 행렬은 산정된 값의 불확실성을 나타내는 지표이므로, 공분산 행렬의 초기값으로는 가장 불확실한 상태를 나타내는 단위 행렬로 설정한다.
2단계는 첫 단계에서 산정된 x(k + 1)를 속도 계측치 (k)로 보정해 정확도를 확보하는 단계다. 이 때 1단계에서 추정한 (k+1)과 (k)를 선형조합하여 1단계의 결과가 보정되는데, 두 값의 선형조합 시 가중치는 1단계 추정치의 오차 공분산과 (k)의 분산을 비교하여 결정한다. 2단계에서 가중치는 식 (8)과 같은 칼만 이득으로 표현된다.
여기서, K(k + 1)는 칼만이득, 는 영평균 잡음성분 υ의 분산 이다. 칼만이득을 통해 2단계에서 산정되는 최종 상태벡터는 식 (12)와 같다.
여기서, 은 식 (10)과 같이 , K(k + 1), C, b2 (k + 1)에 대해 표현된다.
따라서 K′(k + 1)은 b2 (k + 1)이 0이 아니라면 독립적으로 추정이불가능하다. 제안기법에서는 K′(k + 1)을직접계산하지 않고, 속도계 바이어스 b2 (k + 1)를 알려져 있는 상수값으로 가정하고 을 계산하여 식 (9)에 반영한다. 2단계의 최종 상태벡터 산정치의 오차 공분산은 식 (11)로 표현된다.
식 (11)의 공분산 행렬은 다음 시간단계 k + 2의 1단계에서 오차 공분산 초기값으로 활용된다.
3. 실험 검증
제안된 데이터 융합 기법의 변위산정 정확도 및 정밀도를 검 증하기 위한 실험실 수준 실험을 수행했다. 실험에서 사용된 변위는 화재 시 구조물에 유발되는 변위를 모사해 사용했다. 변위 데이터는 미국 NIST(national institute of standards and technology)가 화재로 유발된 구조물의 변위를 검증한 연구(Duron et al., 2005)에서 밝힌 변위의 특성을 고려하여 재현하였다.
3.1. 실험 개요
제안기법의 성능 검증을 위해 수행한 실험의 개요는 Fig. 2와 같다. APS 400 ELECTRO-SEIS 모달 쉐이커 상부 가로막대 형태의 가진부가 화재변위 신호에 따라 수직방향으로 가진되며, 가진부에는 가속도를 계측하는 PCB Piezotronics 3713 E112G 가속도계와 속도를 계측하는 ION LF-24 지오폰 센서가 부착됐다. 레퍼런스 변위, 속도 계측을 위해 Polytec PSV-400 LDV가 사용됐다. PSV-400 시스템은 데이터 취득 시스템, 정션박스, LDV 컨트롤러, 센서 헤드로 구성되어 있다.
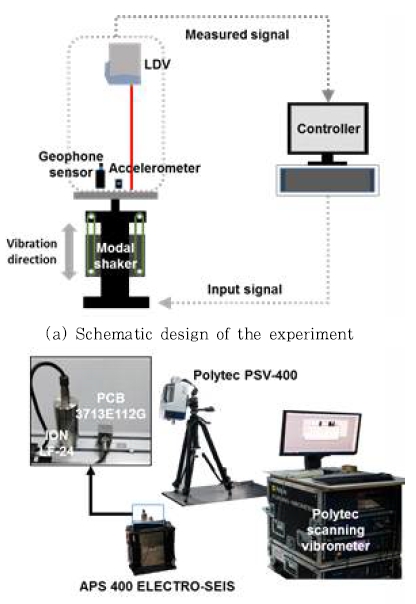
모달 쉐이커에 입력되는 가진 신호는 PSV-400 시스템의 데이터 취득 시스템에 내장된 신호발생기에서 전압 신호로 생성 된다. 이전압신호는APS 400 모달쉐이커의컨트롤러로전달된 뒤, 컨트롤러에서 전압신호의 이득을 조정해 모달쉐이커의 가진부에 전달되어 가진력을 발생시킨다. 모달쉐이커 가진부의 진동은 가속도계, 지오폰 센서, LDV에 의해 계측되는데, 계측 신호는 모두 PSV-400의 데이터 취득 시스템에서 수집된다.
3.2. 실험결과
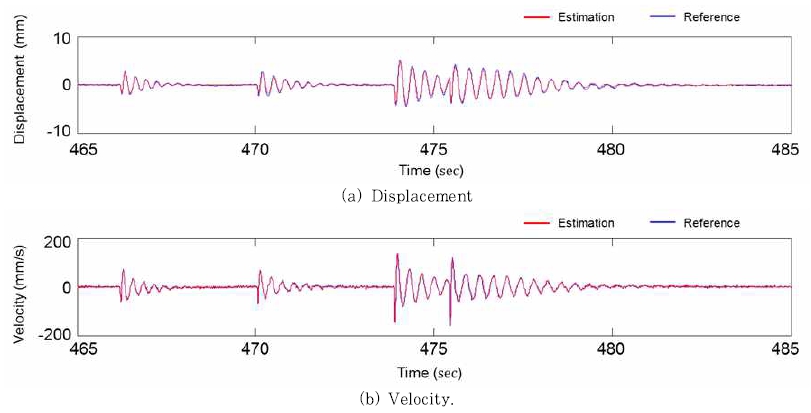
Fig. 3은 제안기법에서 산정한 변위(Fig. 3(a))와 속도 (Fig. 3(b))를 비교한 것이다. 여기서 변위 및 속도의 RMS 오차는 각각 0.957mm, 2.362mm/s로 계산되었다. 가속도 계 및 속도계 고유의 저주파 대역 오차인 편이 오차가 지속적 으로 발생하고 있음에도, 제안기법은 정확하게 레퍼런스 변위, 속도를 따라가고 있음을 확인할 수 있다. Fig. 3에서 확인할 수 있듯이 속도 산정치 보다는 변위 산정치에서 오차가 더 확연 한데, 이는 가속도, 속도 계측치를 바탕으로 변위를 산정하였기 때문으로 본 기법의 한계점을 시사하고 있다.
4. 결 론
본 논문에서는 부착식 센서인 가속도계와 속도계를 적용하여 가속도와 속도를 계측하고 그 계측치를 칼만필터로 융합하여 정확한 속도 및 변위를 산정하였다. 고정된 지면에 설치해야 하는 변위 센서를 활용하는 기존 기법과 비교해, 제안 기법은 (1) 부착식 센서만을 활용하므로 지진, 화재 등 고정된 지면을 확보하기 힘든 곳에도 쉽게 활용할 수 있으며, (2) 일반적으로 성능이떨어지는변위센서를배제하여정확도를제고할수있다.
그러나 변위산정에 있어 가속도, 속도 계측치를 활용하므로 장기계측이 어렵고, 변위 산정치의 오차가 속도 계측치의 수준에 미치지 못한다는 단점이 존재한다. 이 단점의 보완을 위해 속도 데이터의 실시간 필터링, GPS 등 다른 센서의 융합을 통해 제안기법의 변위 산정 정밀도를 높이는 연구를 현재 진행하고 있다.
