

1. 서 론
우리나라의 실제 운행 중인 승강기는 2012년 말 기준 약 46만대에 달하며, 추가로 매년 약 2~3만대가 신규 설치돼 지속적인 증가세를 보이고 있으며, 이와 동시에 승강기 안전사고 역시 매년 증가세에 있다. 승강기 사고 통계가 시작된 지난 1993년부터 2012년까지 승강기 안전사고는 총 965건에 달하는데 주요 사고원인으로는 이용자 과실이 62%(598건)로 가장 높게 차지하고 있으나 관리부실 13.7%(132건), 보수부실 7.2%(69건) 역시 상당히 큰 비중을 차지한다. 이러한 관리/보수 부실에 의한 사고의 경우 이용자 과실에 의한 사고에 비해 승강기 추락과 같은 대형 인명사고로 이어질 수 있어 그 심각성이 더욱 심각하다고 볼 수 있다. 현재 승강기의 안전진단은 정기적 또는 사후관리 차원의 검사를 수행하는 방식으로 이루어지는데 이러한 엘리베이터 사용자의 안전을 확실하게 보장하지 못하게 된다. 또한 점검 시 위험한 엘리베이터 구조물에 직접 접근하여 전문 인력에 의해 수행되는 현재의 검사방식에서는 점검자의 안전 역시 상당한 위험에 노출되어 있고 실제로 점검자의 인명사고도 매해 높은 비율로 발생하고 있다.
특히, 와이어로프 진단의 경우 주로 점검자의 육안 의한 외관 조사 및 접근 가능한 지점에 대한 주기적인 비파괴 검사 수준에 머무르고 있으며, 검사결과가 1차원적인 원신호 형태로 제공되어 와이어로프의 건전성 여부가 전문 인력에 의한 주관적인 신호해석 판단에 의존하고 있다는 단점이 있어왔다. 따라서 현재의 점검방식을 개선할 수 있도록 상시적으로 운용중인 엘리베이터의 상태를 진단하며, 점검자의 접근을 최소화하여 원격으로 모니터링할 수 있는 엘리베이터 안전진단 시스템이 요구되며, 이와 동시에 진단시스템에서 제공하는 진단결과를 직관적으로 인지할 수 있게 신호를 재가공하여 객관적인 진단결과를 도출함으로써 관리자가 와이어로프의 현 상태를 정확히 인지하고 대응할 수 있게 해야 한다.
강자성체로 이루어진 와이어로프 부재에 적합한 NDE 기술로 마그네틱 센서를 선정하여 본 연구에 적용하였는데 마그네틱센서는 뛰어난 신뢰도와 재현성의 장점을 가져 항공, 선박 등을 포함한 다양한 구조물의 모니터링에 널리 사용되고 있다(Mandal et al., 1997; Son, 1997; Sumitro et al., 2002; Wang et al., 2005; Park et al., 2007; Lee et al., 2008). 마그네틱 센서는 그 종류가 다양하며 대상 구조물의 특성에 맞춰 사용하게 되는데(Lenz, 1990), 본 연구에서는 현재 파이프 및 철도레일 등의 연속체 구조물에 일반적으로 적용되고 있는 자속누설(Magnetic Flux Leakage: MFL)법을 와이어로프에 적합한 검사법으로 선정하여 그 가능성을 검증해 보았다(Weischedel, 1985; Atherton, 1987; Weischedel et al., 1991; Coktepe, 2001; Mandache et al., 2005; Kim et al., 2009; Park et al., 2012, 2014; Kang et al., 2014; Kim et al., 2014).
또한 이를 와이어로프에 적합한 형태로 개선하여 센서헤드를 제작하였고, 이를 통해 계측되는 신호를 신호처리과정을 통해 가공한 후, 통계학 기반의 GEV 분포를 이용한 임계값을 설정하여 비교함으로써 객관적으로 손상을 판단하고자 하였다.
2. 누설자속기법의 국부손상 검색 원리
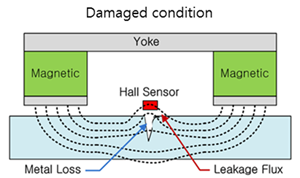
본 연구에서는 국부손상의 검색을 위해 누설자속 센서를 이용하여 자속의 누설을 계측하였다. 와이어로프와 같은 강자성체가 자화되어 있을 때 자석과 같은 특성을 띄게 되는데, 이러한 시편에 국부손상이 발생했을 때 손상 틈의 공기는 자석만큼의 자기장밀도를 가지지 못하기 때문에 Fig. 1과 같이 손상부에 누설되는 자속이 발생하게 된다. 이러한 원리에 기초하여 센서를 이용 자속의 누설을 계측함으로써 강재의 국부손상을 검색할 수 있다.
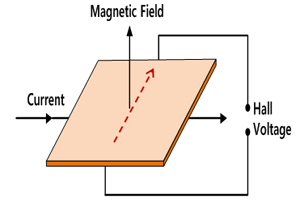
누설되는 자속의 세기는 홀센서를 사용하여 계측할 수 있는데, Fig. 2와 같이 홀센서가 자기장에 놓였을 때 전류와 자기장의 방향에 수직하는 홀 전압이 발생하게 되는데, 이를 홀효과라고 한다(Lenz, 1990). 아를 이용하여 누설자속의 세기를 계측 가능한 전압 값으로 변환하며(Ramsden, 2006), 이렇게 변환된 전압 값은 DAQ장비를 통해 계측되어진다.
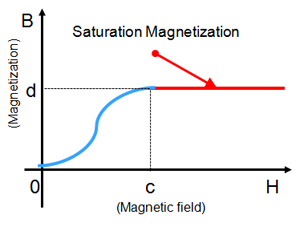
자기장에 놓인 시편의 자화는 Fig. 3과 같은 자기이력곡선을 따르게 되는데 누설자속검사는 일관된 시험결과를 얻기 위해서는 Fig. 3에 빨간색 선으로 나타낸 포화자화 상태에서의 검사수행이 필요하다. 따라서 검사시 시편을 충분히 포화자화시킬 수 있는 c 이상의 자기강도를 가지는 자화체의 구성이 요구된다.
3. 누설자속 센서 헤드 제작
3.1 와이어로프의 자기적 특성 측정
본 연구의 피시험체인 와이어로프의 자기특성을 측정하고, 측정된 자기특성을 활용하여 대상체를 충분히 포화자화시키면서 효과적으로 자속신호의 계측이 가능한 누설자속 센서헤드를 설계하고자 하였다. 이를 위해 Fig. 4와 같은 B-H 곡선 측정 시스템과, Fig. 5와 같이 1, 2차 코일로 이뤄진 센서를 이용하여 직경 10mm 와이어로프를 대상으로 자기특성을 측정하였다.
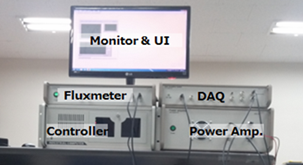
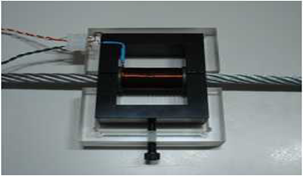
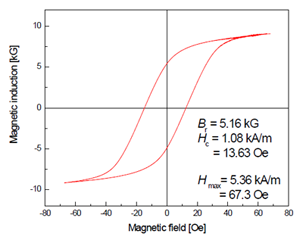
Fig. 6은 직경이 10mm인 와이어로프의 B-H loop을 측정한 결과로 보자력은 13.63 Oe(1.08kA/m), 잔류자속밀도는 5.16kG이며, 인가 자기장 50 Oe에서 포화되기 시작하여 70 Oe정도에서 충분히 자기포화되는 것을 확인하였다. 이에 본 연구에서는 100 Oe이상의 자화부를 구성하여 대상 시험체인 와이어로프를 충분히 포화자화시킬 수 있게 센서헤드를 제작하고자 하였다.
3.2 와이어로프용 누설자속 센서헤드 제작
MFL 센서헤드는 크게 자화부(magnetization part)와 계측부(measurement part)로 구분되며, 자화부는 탐상 대상체를 자화시키는 역할을 하고 계측부는 대상체에 결함이 있을 경우 누설되는 자속을 계측하는 역할을 한다.
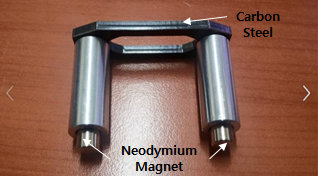
먼저 자화부는 안정적으로 일정한 자기장 형성이 가능하도록 영구자석을 사용하였고, 이는 전자석과 달리 자화를 위한 별도의 전력선이 불필요해 간단한 형상으로 경량화된 시스템 구성이 가능하다는 장점을 가진다. 본 연구에서 자화부의 구성은 Fig. 7과 같이 35N 등급의 네오디움 영구자석(neodymium magnet)과 이를 연결하는 탄소강(carbon steel)을 이용해 요크(york) 형태로 제작하여 말굽자석형태의 요크 하단으로 자기장이 형성되게 하였다.
ANSYS사의 Maxwell프로그램을 이용하여 설계된 자화요크의 자기장분포를 시뮬레이션해 본 결과, Fig. 8과 같이 와이어로프가 위치하게 될 하단부 중심에서 156 Oe의 충분한 자기장이 형성됨을 확인하였고, 이를 토대로 자화요크를 제작하였다.
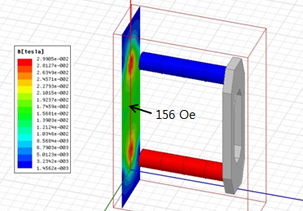
제작 후 가우스메터를 이용하여 중심부 자기장세기를 측정하였고 와이어로프를 포화자화시키기에 충분한 130 Oe 크기의 자기장이 형성됨을 확인할 수 있었다.
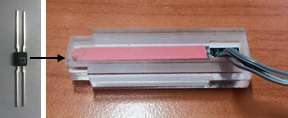
계측부의 경우 Fig. 9와 같이 홀센서(HW300A, Honeywell)를 끝단에 부착한 홀센서 피그 형태로 제작한 후 플라스틱 소재로 패키징하였다.
제작된 계측부와 자화부는 하나의 모듈을 구성하여 Fig. 10과 같이 프레임에 조립하였다. 센서헤드의 프레임은 자화부에서 형성된 자기장에 영향을 주지않는 동시에 헤드부의 경량화를 위해 알루미늄 소재를 사용하였다.
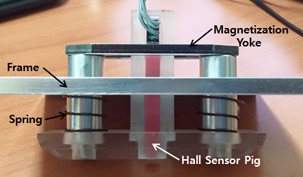
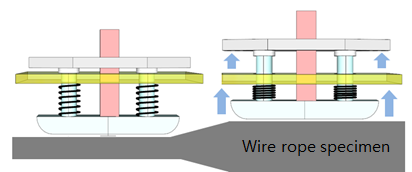
누설자속 신호의 계측에 있어 센서와 시편과의 거리인 리프트오프(Lift-off) 값이 계측결과의 해상도에 매우 큰 영향을 미치기 때문에, 이를 최소화하면서 센서모듈을 충격으로부터 보호하고자 프레임과 모듈사이를 탄성을 가지는 스프링으로 연결하였고, 모듈이 프레임의 구멍을 통해 상하운동할 수 있게 설계하였다. 또한 하단부는 유선형의 케이스를 사용하여 자화요크와 계측부를 고정하여 모듈의 내구성을 확보함과 동시에, 스프링 구조와 함께 작동하여 Fig. 11과 같이 갑작스러운 단면 변화에 대응하고 다양한 직경의 와이어로프에 대응할 수 있게 하였다. 본 연구에서는 10mm~20mm 직경의 와이어로프에 대응할 수 있게 설계하였다.
이렇게 제작된 독립된 센서모듈 4개를 Fig. 12와 같이 와이어로프의 단면의 원주방향을 따라 상,하,좌,우 총 4개의 채널로 배열하였다. 이와 함께 자화부 내 총 4개의 요크는 일정한 간격으로 같은 극성끼리 배치되어 센서헤드가 하나의 큰 자석형태와 같이 시편에 고르게 자기장을 형성하게 된다.
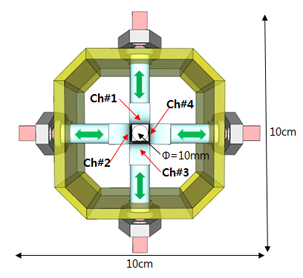
Fig. 13에 제작된 4ch의 누설자속 센서헤드를 나타내었다.
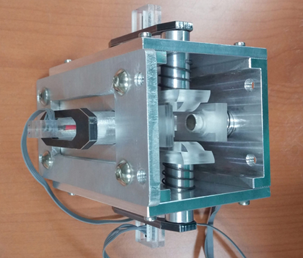
제작된 센서는 1kg 이내의 가벼운 무게를 가지며, 상단부의 볼트 체결을 이용해 직선운동 검사장치와 연결할 수 있게 하였다. 한편, 누설자속의 측정은 우선 터미널 보드의 SMPS (Switching Mode Power Supply)를 이용해 각 홀센서로 안정적인 정전류(DC)를 흘려주고 각 홀센서에서 계측된 신호는 터미널 보드 및 DAQ를 통해 디지털 신호로 동시 수집한 후 TCP/IP 통신을 통해 컨트롤러로 전송하였다. 본 제작 장비의 구동 및 제어는 LabVIEW? 기반의 UI(user interface)를 구성하여 사용하였다.
4. 누설자속기반 와이어로프 진단기법의 실험적 검증
4.1 실험 셋업 및 손상 시나리오
누설자속센서를 이용한 와이어로프의 국부손상의 검색 가능성을 살펴보기 위해 실험적 연구를 수행하였다. 이를 위해 Fig. 14와 같이 실험시편 및 장비가 구성되었다.
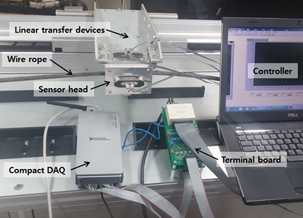
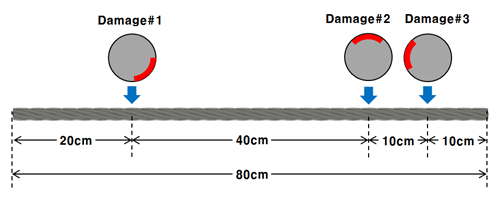
센서헤드의 수평운동을 위해 직선운동장치가 활용되었으며, 자속신호의 계측을 위해 Terminal board 및 Compact DAQ가 구성되었고, Laptop에 설치된 UI를 통해 장비의 제어와 계측신호의 확인 및 저장을 수행하였다. 실험을 위해 Fig. 15와 같은 단면을 가지는 직경 10mm, 길이 80cm의 7×19 와이어로프를 준비하였고, 국부손상의 모사를 위해 Fig. 15와 같이 부분 단선 손상을 발생시켰다.

부분 단선은 Fig. 16과 같이 20cm지점 하단 우측, 60cm 지점 상단, 70cm 지점 좌측에 각각 발생시켰고, 각 부분 단선은 단면의 5% 이내의 크기로, 최대 깊이는 약 2mm이다.
와이어로프는 Fig. 17과 같이 직선이동 검사 장치에 고정된 센서헤드의 중심을 통과하게 설치되었다.

누설자속 센서헤드는 직선이동 검사장치에 설치되어 1m/s의 속도로 수평이동하며, 고정된 와이어로프를 스캔하여 동시에 4ch의 홀센서에서 자속분포를 계측한다. 계측된 자속 값은 터미널 보드와 DAQ를 통해 컨트롤러로 전달되고, 계측 Sampling rate는 5kHz이다.
4.2 와이어로프 국부손상 진단 결과
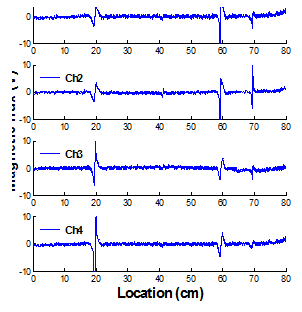
각 계측채널에서 계측된 자속신호를 Fig. 18에 나타내었다. Fig. 18에서 살펴보면, 우측하단 부분단선을 발생시킨 1번 손상이 위치한 20cm 지점에서는 계측채널 #3, #4에서 뚜렷한 자속누설 신호가 확인되었고, #1, #2번의 계측 채널에서도 작은 누설자속신호가 감지되었다. 또한 상부에 손상이 가해진 2번 손상이 위치한 60cm 지점에서는 계측채널 #1, #2번에서 누설자속 신호를 확인할 수 있었다. 우측에 부분단선을 발생시킨 3번 손상이 존재하는 70cm 지점에서 역시 손상과 근접한 #2번 계측채널에서 신호를 확인 가능하였다.
이들은 실제 손상의 길이방향 위치와 정확히 일치하였고, 또한 원주방향으로 손상의 위치에 가장 근접한 계측 채널에서 보다 큰 누설자속 신호가 계측됨을 보였다. 이를 통해 누설자속센서를 이용해서 와이어로프의 부분단선 손상의 검색이 가능함을 확인할 수 있었고, 누설자속 신호의 감도는 손상과 센서사이의 거리에 따라 달라짐을 알 수 있었다.
위와 같이 계측된 원 자속 신호(raw signal of magnetic flux)의 경우, 누설자속 신호 외에도 다양한 변수를 포함하게 되는데, 이는 센서헤드의 이동속도 변화, 대상체의 자기분포, 리프트 오프 변화 등 다양한 요인에 의한 노이즈 영향 때문이며 결함 탐상의 방해요인으로 작용할 수 있다. 또한 이러한 신호의 움직임으로 인해 손상을 구분할 수 있는 임계값 설정에 어려움이 따른다.
따라서, 노이즈의 영향을 최소화하고 누설자속 신호에 대한 가시성 향상을 위해 원 신호를 미분하여 순간 변화량을 활용하였다(Jun et al., 2011).
이어서 자동화된 손상의 판단을 위해 객관적으로 손상과 정상상태를 구분해 줄 수 있는 기준이 되는 정상상태의 임계값을 설정하였다. 기준이 되는 하나의 임계값을 구하기 위해 자속의 변화값을 절대값으로 양수화하였다. 본 연구에서는 통계학적 방법인 일반극치분포(GEV)를 이용하여 99.9% 신뢰도의 임계값을 구하였고 그 값은 0.182였다(Coles, 2001).
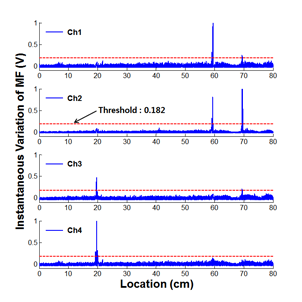
Fig. 19에 양수화된 순간변화량과 계산된 임계값을 함께 나타내었다. Fig. 19에서 실제 손상이 존재하는 지점과 근접하는 계측 채널에서만 양수화된 순간 자속 변화량이 임계값을 초과함을 확인할 수 있다.
1번 손상이 존재하는 20cm 지점에서는 #3,#4번 계측 채널에서, 2번 손상이 존재하는 60cm 지점에서는 #1, #2번 계측 채널, 3번 손상이 있는 70cm 지점에서는 #2번 채널에서 순간 자속 변화량이 임계값을 초과하여 손상을 탐상하였다.
이와 같은 사실을 통해 임계값 설정을 이용하여 와이어로프의 국부손상을 객관적으로 정상상태 및 노이즈신호로부터 분리할 수 있음을 확인할 수 있었고, 또한 원주방향으로 다채널의 센서를 배치함으로써 손상의 원주방향 위치를 추정할 수 있었다.
5. 결 론
본 연구에서는 와이어로프의 국부손상 검색을 위해 다채널의 MFL 센서를 제작하였고, 이를 사용한 다양한 국부손상의 검색 실험을 수행하여 다음과 같은 결론을 얻었다.
1. 5%이내의 단면손실을 가지는 부분단선 형태의 국부손상 위치에서 누설자속신호가 계측되었다.
2. 손상부와 센싱 채널 사이의 거리에 따라 계측 감도가 달라졌다.
3. 4채널의 센서를 원주방향으로 배열함으로써 채널별 자속신호 값을 통해 손상의 원주방향 위치를 찾을 수 있었다.
4. 자속신호의 순간변화량을 이용할 경우 신호에 포함된 노이즈의 저감이 가능하여 누설자속신호의 해상도가 향상되었다.
5 .실제 국부손상위치에서 자속신호가 GEV분포를 이용하여 설정한 임계값을 초과하였고, 이를 이용하여 객관적으로 손상을 판단할 수 있었다.
추후 다양한 유형의 손상검색, 실제와 유사한 환경에서의 연구를 수행하고, 운용중 발생하는 다양한 노이즈에 대한 보상기법의 개발을 통해 실제 엘리베이터와 같은 구조물의 와이어로프 모니터링에 효과적으로 사용 가능한 기술이 될 것으로 기대된다.
