

1. 서 론
산업 발전의 가속화와 국가 간 교역량이 급증하여 주요 운반 하역 장비인 크레인의 수요가 나날이 증가하고 있다. 크레인은 운송 품목과 기능에 따라 컨테이너를 배에 선적하거나 하역하는 컨테이너 크레인(Container crane), 부두의 야적장에서 컨테이너를 취급하는 야드용 갠트리 크레인(Gantry crane), 다용도로 사용할 수 있는 브리지 트래블링 크레인(Bridge traveling crane), 수평 인입 크레인(Level luffing crane) 등과 선박의 블록이나 교량 등의 구조물을 취급하는 대형 해상 크레인들이 있다.
이러한 크레인들은 다양한 작업하중 환경에서의 구조 안정성이 보장되고 평가되어야 하지만, 제작되는 크레인 구조물의 대형화 및 주변 환경의 복잡화로 평가에 제한을 받는다. 이에 대한 합리적인 대안으로 유한요소법과 같은 전산해석을 통한 안전성 평가방법이 적극적으로 도입되고 있다(Lee et al., 2000; Park et al., 2001; Kim et al., 2001). 하지만 전체 구조물에 대한 동역학적 특성 및 풍하중을 포함한 다양한 하중조건에 대한 변형 및 응력 등의 종합적인 특성들을 고려한 안전성 평가적용 연구는 미비한 실정이다(Lee et al., 2011; Ku et al., 2012; Cha et al., 2012).
이 중 대형 구조물인 갠트리 크레인은 컨테이너를 트레일러로부터 야적장으로 하역/적재하거나 혹은 야적장으로부터 트레일러에 적재하는 역할을 하는 크레인이며 컨테이너 처리 능력은 시간당 약 40개 정도이다. 따라서 갠트리 크레인의 작동은 구조물의 정하중 특성 이외에 설계기준으로 주어지는 동하중 조건과 컨테이너의 이동 메카니즘을 통하여 발생하는 하중에 의한 동적 거동의 분석이 매우 중요하다.
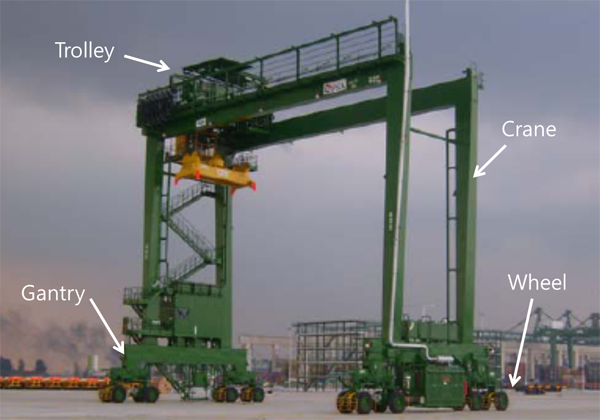
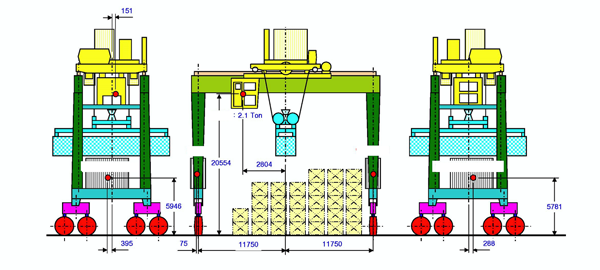
본 연구에서는 갠트리 크레인 중 RTGC(Rubber Tired Gantry Crane) 크레인(Fig. 1)의 대표적인 하중조건에 대한 동적 거동을 살펴보고자 한다. 이를 위하여 대형구조물인 크레인은 유한요소모델을 사용하여 모델링하고 부속물인 Trolley와 Gantry, Wheel 등은 강체로 모델링하여 동역학 시뮬레이션을 수행하였다.
2. 본 론
2.1 갠트리 크레인의 유한요소 모델링
크레인은 RTGC의 핵심구성부로서 여러 크기와 단면을 가진 빔과 판이 결합된 대형 구조물의 형태를 가지고 있다. 또한 그 크기가 RTGC의 다른 구성 부분에 비하여 매우 크고 Trolley가 장착된 상부의 변형량과 응력분포의 해석이 중요하므로 유한요소 모델링을 수행하였다. 유한요소 모델링은 주요 설계변수들 간의 기하학적 관계들을 구하여 작성한 자동 유한요소 프로그램(ANSYS APDL)을 이용하여 3차원 솔리드 모델을 사용하였다. 이후 Mapped mesh를 통하여 유한요소의 개수와 수치적 오차를 최소화하기 위하여 전체 솔리드 모델을 전부 사각형 형상의 면으로 분할하였다.
ANSYS에서 생성한 유한요소모델을 다물체 동역학 해석을 위한 ADAMS 소프트웨어로 Parasolid geometry dimension으로 변환하여 적용하였다. Parasolid geometry로 변환된 각 절점(Node)과 강체연결부의 Contact의 개수가 많아지면 동역학 해석시간이 급격히 증가하게 되므로 mapped mesh를 통하여 해석결과의 신뢰성을 가지면서도 적정한 절점수를 가지는 개선된 유한요소 모델이 필요하다. 따라서 응력이 집중되는 Girder와 Leg의 결합부는 작은 크기의 요소를 사용하고, 나머지 부분은 요소크기를 증가하고 미세한 곡률부위와 기타요소를 삭제하여 다음과 같이 요소개수 8,600개, 절점개수 8,570개의 간략화한 유한요소 모델을 생성하였다(Fig. 2).
유한요소 모델에 사용한 Element type은 ANSYS Shell 63이다.
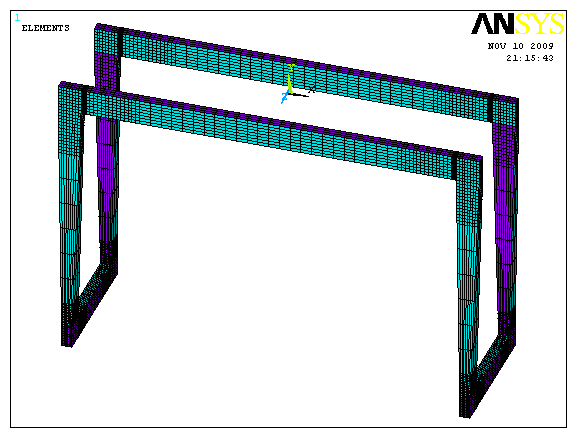
Table 1
Comparison of natural frequencies
| Mode | Full finite element model | Reduced finite element model |
|---|---|---|
| 1st | 1.29 Hz | 1.03 Hz |
| 2nd | 1.40 Hz | 1.12 Hz |
| 3rd | 1.57 Hz | 1.24 Hz |
간략화된 유한요소 모델의 실효성을 파악하기 위하여 RTGC 크레인 구조물의 설계도면을 바탕으로 Full finite element model(약 25,000개의 유한요소)을 구성하고 이에 대해 모달해석(modal analysis)을 수행하였다. 모달해석을 수행하여 구한 3차 모드까지의 고유진동수를 다음과 같이 비교하였다. Table 1에 나타난 바와 같이 3차 모드까지의 고유 진동수를 비교하면 간략화된 유한요소모델의 고유진동수가 낮게 나타나고 있다. 이는 일반적인 RTGC의 높이가 약 25m로 매우 커다란 기계구조물이고, 본 연구에서 단순화한 유한요소모델이 요소개수를 줄이기 위해 요소크기를 증가시켜 해석모델의 강성이 실제보다 낮아졌기 때문으로 판단된다.
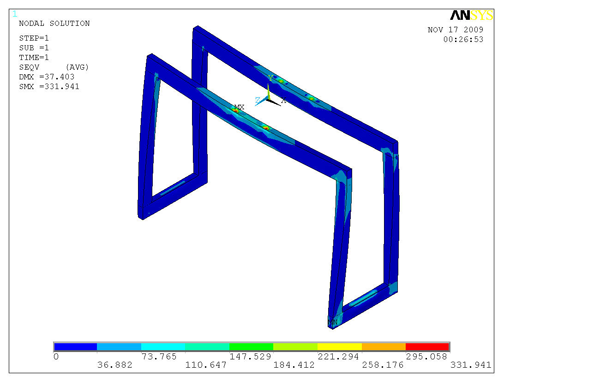
Fig. 3은 간략화한 수정 모델을 이용하여 Crane에 Trolley가 결합되었을 때 Trolley의 자중(약 26톤)으로 나타나는 응력분포를 나타내고 있다. 해석결과 나타난 최대응력은 약 330MPa이며, 본 논문에서 고려된 RTGC에 적용된 고강도강의 항복응력은 400MPa이상이다. 최대응력값은 해석 시 크레인 설계 및 동하중 안전계수를 고려하여 계산된 결과이다.
2.2 다물체 동역학 모델링
2.2.1 Trolley, Gantry, Wheel의 모델링
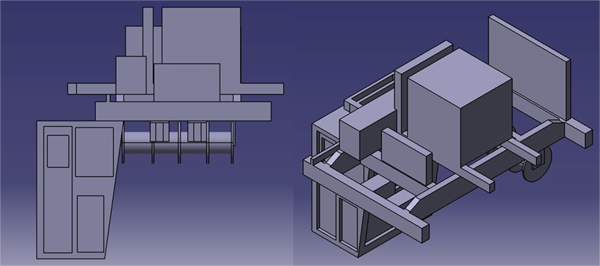
RTGC에서 Trolley는 Crane Girder의 레일 위를 움직이며 컨테이너를 이송하는 장치로서 운전실을 포함하고 컨테이너를 연결하는 로프 연결부로 구성되어 있다. Trolley의 형상은 매우 복잡하고 여러 가지의 구성부품으로 이루어져 있으며, 운전실을 포함하면 그 크기가 크므로 회전관성 모멘트와 질량중심, 연결부 위치 등을 무시하고 단순한 형태의 강체로 모델링하게 되면 해석결과의 신뢰성에 문제가 발생할 수 있다. 따라서 실제 형상을 최대한 유지하기 위해 3차원 CAD작업을 수행하고 이를 ADAMS에서 강체로 변환하였다(Fig. 4).
Trolley는 크레인 연결부인 레일 위에서 컨테이너를 이송하는 역할을 하므로 Prismatic joint를 각 연결부에 모델링하였다. 또한 컨테이너를 연결하는 로프 연결부에는 컨테이너의 하적작업이 가능하도록 컨테이너 운전속도에 부합하는 직선 Motion을 인가하였다.
Gantry는 Crane Sill beam에 부착되어 RTGC의 이동바퀴에 연결되는 부분으로 4개의 컨테이너용 바퀴가 장착된다. 겹판스프링의 구조물이 현가장치의 역할을 수행하고, 각 바퀴에는 휠 고정기(Wheel lock)와 조향을 위한 터닝장치가 장착되어 있다. 본 연구에서는 겹판 스프링의 강성값을 구할 수 없고, 조향을 하지 않는 직진 주행만을 고려하므로 위 구성부를 포함하는 강체로 모델링하였다. Trolley와 마찬가지로 Gantry의 크기도 무시할 수 없을 만큼 크기 때문에 실제 형상을 유지하며 3차원 CAD작업을 수행하고 이를 ADAMS에서 강체로 변환하였다(Fig. 5).
본 연구에서 RTGC에 동하중이 작용할 때 윤하중(Wheel load)의 변화로 나타나는 크레인의 거동을 살펴보기 위해서는 타이어에 작용하는 수직력과 횡력에 대한 해석과 분석이 중요하다. RTGC에 장착된 휠은 컨테이너용 바퀴로서 일반 승용차용 타이어와는 크기 및 물성치가 다르다. 하지만 본 연구에서는 휠에 작용하는 수직력과 횡력을 살펴보기 위해 승용차용 타이어 해석방법 중 가장 일반적인 Magic Formula를 이용하였다. 일반 승용차용 타이어와의 차이를 보상하기 위해서 수직 및 코너링 강성값을 승용차의 2배로 모델링하였다. 타이어와 노면의 마찰은 ADAMS에서 제공하는 Contact으로 모델링하였다. Gantry의 각 바퀴연결부에는 Revolute joint를 모델링하여 회전운동이 가능하게 하였다.
2.2.2 ADAMS를 이용한 연결 및 결합부 모델링
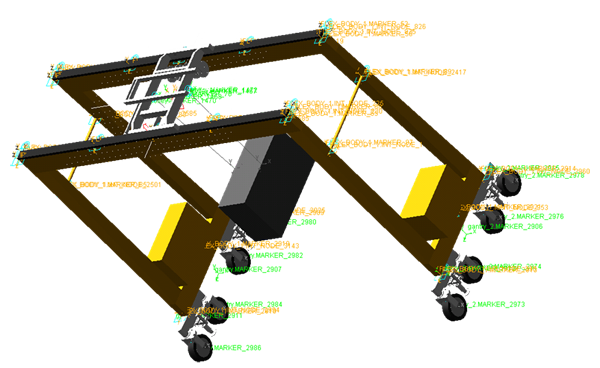
RTGC의 기타 부속부인 Control panel, Engine generator, Container, Connecting beam 등은 해석의 용이성을 위해 단순한 형태의 강체로 모델링하였다. 기타 부속부의 질량중심과 부착 위치는 Fig. 6을 참조하였다.
앞에서 언급한 RTGC의 각 구성부는 고정부에는 Fixed joint를 운동부에는 Prismatic 또는 Revolute Joint를 사용하여 부착하였다. 유한요소로 모델링된 크레인과 Gantry는 결합부에 Fixed joint를 이용하여 고정하였으며, 크레인과 Trolley의 접촉부는 Trolley의 운동을 보장하기 위해 크레인 상단부의 node에 Contact을 이용하여 모델링하였다. 컨테이너가 운반되는 하중조건인 OP1 하중조건에서 컨테이너와 연결된 Trolley의 운동은 Trolley의 로프 연결부에 Motion을 인가하여 시뮬레이션 하였다(Fig. 7). ADAMS로 구성된 전체 RTGC 모델 각 요소들의 종류와 개수는 Table 2와 같다.
2.3 RTGC의 동적 거동 분석
본 연구에서는 RTGC의 Design Criteria의 다양한 하중조건 중 RTGC Design Criteria에 속한 OP1과 컨테이너 이송을 위한 Trolley 이동에 대한 윤하중 해석 결과를 고찰하였다. 해석에서 사용한 Trolley와 Crane사이 접촉부의 강성과 감쇠값은 그 값을 구할 수 없어 각각 100N/mm, 200 N·s/mm로 가정하였다. Trolley는 Crane 접촉부를 Corner로 명명하고 운전실이 있는 부위를 Corner 1으로 하여 반시계방향으로 Corner 2, Corner 3, Corner 4로 하였다.
2.3.1 OP1 하중조건에 대한 해석 결과
RTGC Design Criteria의 부하조건 중 OP1 하중 조건(Crane in use without wind)은 DL(Dead Load), TL (Trolley Load), IMP(Loads due to vertical acceleration of the lifted load), LATT(Lateral due to Trolley Travel)을 더한 것으로 DL(1094kN)을 제외한 나머지 하중을 계산하여 Trolley corner 각각에 적용하였으며 이를 X-Y-Z방향(Fig. 8)으로 분해하여 나타내면 Table 3과 같다.
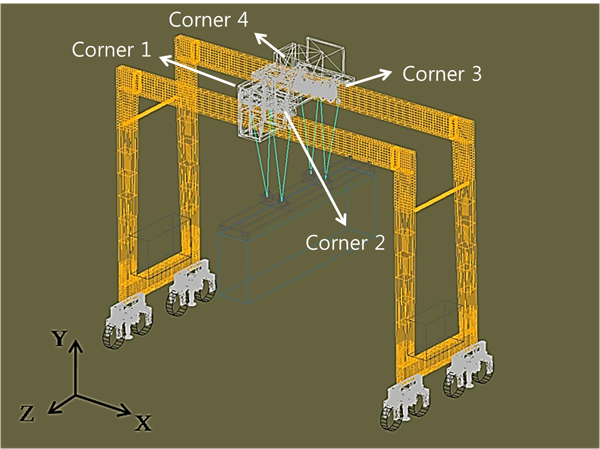
Table 3
Load conditions of OP1
| X- direction | Y-direction | Z-direction | |
|---|---|---|---|
| Corner 1 | 21.582kN | -102.5145kN | -4.4145kN |
| Corner 2 | 14.715kN | -82.404kN | -4.4145kN |
| Corner 3 | 21.582kN | -102.5145kN | -4.4145kN |
| Corner 4 | 14.715kN | -82.404kN | -4.4145kN |
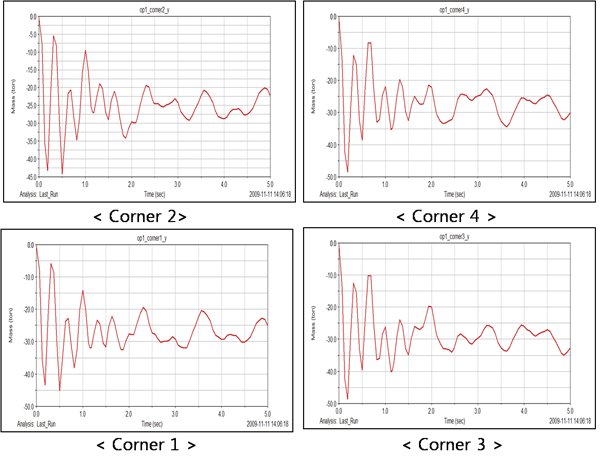
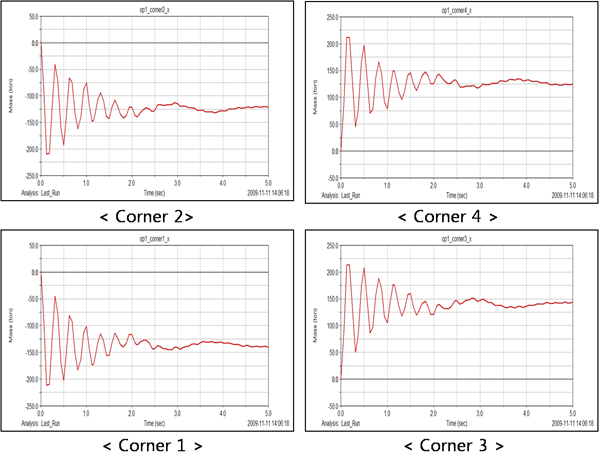
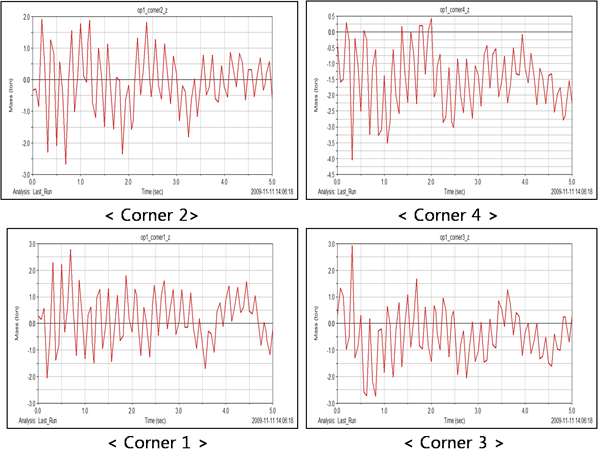
OP1의 하중이 Trolley에 작용하면 Crane 구조물의 변형이 발생하고 이러한 변형이 구조물의 진동을 유발하게 된다. 이러한 진동으로 인해 Trolley의 질량중심에 작용하는 힘이 변화하게 되는데 이를 표시하면 다음 그림과 같다.
먼저 Fig. 9의 Trolley 질량중심에 작용하는 수직방향 하중변화를 살펴보면 수직방향으로 초기 약 190ton의 하중이 Trolley 각 Corner부에 분산되었다가 시간이 지남에 따라 약 130ton으로 수렴되어 감을 알 수 있다. 이러한 하중의 변화는 앞서 언급한 바와 같이 Crane 구조물의 강성과 변형으로 발생하는 진동의 영향으로 파악된다. 이때 Crane의 응력분포는 시간이 지남에 따라 변화하므로 어느 순간의 값보다 해석 시간 동안 응력분포의 변화를 파악하는 것이 중요하다. Trolley 질량중심에 작용하는 Girder 방향과 RTGC 이동방향 하중변화는 수직방향 변화보다 비교적 빠르게 수렴하고 있는데 이는 RTGC Crane의 수직방향 변형(Girder의 굽힘 변형)이 다른 방향의 변형보다 크게 나타나기 때문이다(Fig. 10, 11).
2.3.2 Trolley 이동에 대한 윤하중 해석 결과
RTGC wheel에 작용하는 윤하중은 수직방향하중에 의한 넘어짐, 운전 또는 작업 중의 이동 등 RTGC 전체거동에 영향을 미치는 중요한 요소이다. 일반적으로 RTGC가 컨테이너 작업만을 할 때 wheel에 고정 케이블을 연결하여 이동에 의한 작업사고를 방지하고 있지만, 실제 윤하중에 의해 나타나는 RTGC의 동적 거동은 파악하고 있지 못하는 실정이다.
이에 본 연구에서는 유한요소모델을 사용한 Crane의 변형과 Wheel에 작용하는 수직방향 및 횡방향 하중을 해석함으로써 윤하중에 의한 RTGC의 동적 거동을 분석하였다. 해석조건은 RTGC에 단순히 컨테이너만 연결하고 Trolley를 운전하여 컨테이너를 좌단에서 우단으로 움직인 것으로 하였다.
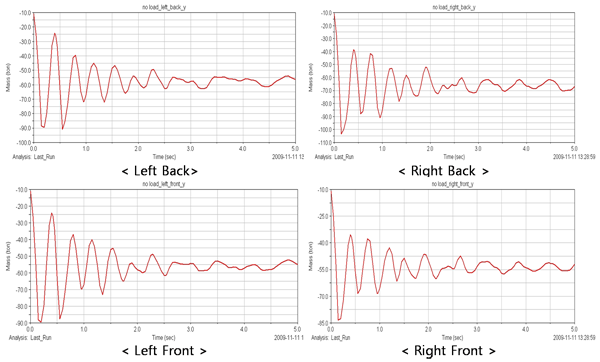
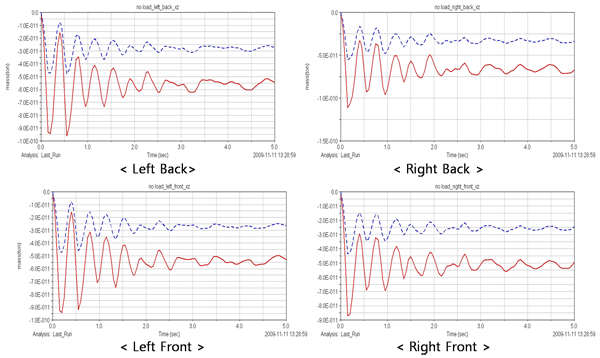
Figure 13
Wheel load changes in the lateral and moving directions(dotted line: the moving direction, solid line: the lateral direction)
Fig. 12~13에서 나타난 바와 같이 컨테이너만 연결하여 Trolley를 움직인 경우에도 불구하고 RTGC 구조물의 변형으로 인해 윤하중의 변화가 발생하고 이로 인해 RTGC가 움직일 수 있음을 알 수 있다. Trolley가 이동하거나 컨테이너의 이송 등과 같은 RTGC의 작업 및 운전 시에는 Crane의 변형과 상호 연계되어 윤하중의 변화가 크게 나타날 수 있음을 예측할 수 있으며 본 연구결과를 바탕으로 보다 정확한 RTGC의 변형과 이동에 대비할 수 있는 반력 요소의 설계가 가능하다.
3. 결 론
본 연구에서 수행한 주요 연구결과를 정리하면 다음과 같다.
1)컨테이너를 트레일러로부터 야적장으로 하역/적재하거나 혹은 야적장으로부터 트레일러에 적재하는 역할을 하는 RTGC(Rubber Tired Gantry Crane)의 다양한 하중조건에 대한 동적 거동을 분석할 수 있는 동역학 해석 모델을 개발하였다.
2)RTGC의 주요 구성품인 크레인은 대형 구조물로 하중에 대한 변형이 크게 나타나기 때문에 유한요소 모델을 사용하고 그 외의 부속부는 3D CAD모델링을 수행한 후 해석의 편의를 위해 강체로 모델링하였다.
3)크레인의 유한요소 모델을 검증하기 위해 모달해석을 수행하였으며 고유진동수와 모드를 실험값과 비교하였다.
4)RTGC의 다양한 하중조건 중 대표적인 OP1과 Trolley의 컨테이너 이송 하중조건에 대해 다물체 동역학 해석을 수행하였으며 그 결과를 분석하였다.
5)동역학 해석 결과 20톤의 컨테이너를 이송할 때 RTGC에 Crane 구조물의 강성과 변형으로 인해 크레인에 진동의 영향이 상대적으로 크게 나타났으며 마찬가지로 Crane의 응력분포는 시간이 지남에 따라 변화하는 것을 알 수 있었다.
6)컨테이너만 연결한 무부하 운전조건임에도 불구하고 RTGC 구조물의 변형으로 인해 윤하중의 변화가 발생하고 이로 인해 RTGC가 움직일 수 있음을 알 수 있었으며 이를 바탕으로 Trolley가 이동하거나 컨테이너의 이송 등과 같은 RTGC의 작업 및 운전 시에는 Crane의 변형과 상호 연계되어 윤하중의 변화가 크게 나타날 수 있음을 예측할 수 있다.
