

1 서 론
최근 국내에서 부실시공, 노후화 등으로 인해 시공 중 또는 시공 후에 구조물의 붕괴사고가 잇따라 발생함에 따라, 구조물 건전도 모니터링에 대한 관심이 증가하고 있다. 특히, 구조물의 변위는 구조물의 건전도를 파악하는데 중요한 물리적 계측치 이다(Calvi et al., 1995, Crowley et al., 2004, Wang et al., 2011,).
교량, 고층빌딩 등과 같은 대형 구조물의 변위를 계측하는 대표적인 센서는 LVDT(linear variable differential transformer), LDV(laser doppler vibrometer) 그리고 RTKGNSS( real-time kinematic global navigation satellite system) 등이 있다. 그러나 이들 각각은 변위 계측 정확도 또는 실제 구조물에의 적용성 측면에서 한계가 있다(Dai et al., 2014; Gwashavanhu et al., 2016; Tariq et al., 2002).
LVDT는 대표적인 변위계측 센서로 정밀도는 1μm 이내로 정밀하지만, 실제 대형 구조물에 적용하기 위해서는 설치 시 비계와 같은 가설물을 필요하기 때문에 해상교량 ,고층빌딩 등과 같은 대형 구조물에 적용하기 어렵다(Tariq et al., 2002). 또 LDV는 레이저 빔을 대상 구조물의 변위 계측 지점에 주사 하면 도플러 효과에 의해 해당 지점의 속도와 변위를 동시 측정할 수 있는 장비이다. 원거리에서 사용할 수 있고, 정확도가 0.3nm 이내로 정밀한 계측이 가능하다는 장점이 있지만, 레이저의 경로가 항상 확보되어야 상시 모니터링이 가능하고, 고가의 장비이므로 손·망실에 대한 위험도를 감수해야 한다 (Gwashavanhu et al., 2016).
이러한 이유로 최근 해상교량, 고층빌딩 모니터링에서는 대부분 RTK-GNSS를 적용하고 있다. RTK-GNSS는 base와 rover로 이루어진 두 개의 GNSS를 사용하여 같은 위성에서 오는 반송파를 전송받는다. 이 두 전송신호에서 전리층 오차, 인공위성 시간 오차와 같은 공통 오차요인을 소거하여 약 3cm 이하의 정확도로 변위를 획득할 수 있다. 이는 단일 GNSS의 정확도에 비해 매우 향상된 수치이나, 샘플링 주파수가 20Hz 이하로 한정되며, 외부 환경으로부터 유발되는 멀티패스와 사이클 슬립으로 인해 변위 계측 오차가 필연적으로 발생할 수 밖에 없다(Dai et al., 2014).
본 논문에서는 포스피드백 가속도계와 저가의 RTK-GNSS 에서 계측한 가속도, 속도, 변위 데이터를 이단계 칼만필터로 융합하여 건설구조물의 3자유도 동적변위를 계측하는 시스템을 개발하였다. 개발 시스템은 비계와 같은 가설물을 필요로 하지 않고 상시모니터링이 가능하며, 기존 변위 센서인 LDV, RTKGNSS에 비해 저렴한 가격으로 제작이 가능하다. 또한 대형 구조물에 가장 보편적으로 사용되고 있는 RTK-GNSS와 비교 하여 변위 계측 정확도, 샘플주파수 측면에서 우수한 성능을 보임을 실제 교량 실험을 통하여 검증하였다.
2 이단계 칼만필터 기반 데이터 융합 기법
제안된 변위 계측 시스템에서는 고정밀 동적변위를 실시간 으로 산정하기 위해 가속도계 데이터에 내재된 바이어스를 보정하고, 실시간 연산이 가능한 이단계 칼만필터가 적용된다 (Kim et al., 2016).
2.1 상태공간모델의 구현
상태공간모델을 구현하기 위하여 가속도계로 계측한 가속도와 RTK-GNSS로 계측한 변위는 식 (1~3)과 같다고 가정한다.(1)(2)
여기서, 는 가속도계와 RTK-GNSS에서 계측한 가속도, 속도, 변위 계측값이고, 는 가속도, 속도, 변위의 참값이며, 는 각각 가속도, 속도, 변위 데이터에 포함된 영평균 백색잡음, b(k) 는 가속도 데이터의 바이어스 성분이다.
상태벡터는 식 (4)과 같이 정의된다.
2.2 이단계 칼만필터 기반 데이터 융합 기법
이단계 칼만필터의 제 1단계는 가속도 데이터의 바이어스를 고려하지 않은 상태로 가속도, 속도, 변위 데이터를 활용하여 변위를 추정하는 과정이다. 제 1단계 칼만필터의 시스템 모델은 다음과 같다.(5)(6)(7)(8)
최종적으로, 제 1단계 칼만필터에서 가속도 계측값에 내재된 바이어스를 고려하지 않은 추정 변위는 다음과 같다.(9)
제2단계는 가속도 계측값의 바이어스 값을 추정하여 바이 어스로 인한 오차를 제 1단계 칼만필터의 추정 변위 값에서 제거하는 과정이다.(10)(10)
여기서, 는 각각 추정 전 바이어스 값, 추정 후 바이어스 값, 바이어스 고려하지 않은 추정 변위, 바이어스 고려한 추정 변위이다.
3 3자유도 동적변위 계측 시스템 개발
3.1 개발 시스템 구성
개발 시스템은 베이스 모듈, 센서 모듈, 컴퓨테이션 모듈로 구성되어 있다. 베이스 모듈은 RTK-GNSS 칩셋, GNSS 안테나, 무선 통신용 모듈로 구성되어 있다. 베이스 모듈은 센서 모듈 내 RTK-GNSS 칩셋의 RTK 연산을 통한 정밀 변위 산출을 위하여, 베이스 모듈의 위성 신호 정보가 포함된 관측 메시지를 센서 모듈로 전송한다. 센서 모듈은 RTKGNSS 칩셋, GNSS 안테나, 포스피드백 가속도계 그리고 무선 통신용 모듈과 이종 데이터의 시간동기화를 위한 보드부로 구성되어 있다. 센서 모듈은 가속도계와 RTK-GNSS에서 계측한 가속도, 속도, 변위 데이터를 시간 동기화하여 한 개의 데이터 패킷을 생성한 후, LAN 케이블을 통하여 컴퓨테이션 모듈에 실시간으로 전송한다. 컴퓨테이션 모듈은 센서 모듈로 부터 수신된 데이터를 이단계 칼만필터링하여 실시간으로 고정밀 변위를 산정하고, 이를 저장 및 시각화한다.
3.2 베이스 모듈
베이스 모듈은 저가의 RTK-GNSS 칩셋(piksi multi), GNSS 안테나(GPS500), 무선 통신용 모듈(FreeWave, DDM2T)로 구성되어 있다. 센서 모듈에서 RTK연산을 수행하기 위하여, 베이스 모듈은 GNSS 안테나를 통하여 수신되는 GPS L1/L2, GLONASS G1,G2 신호의 관측메시지를 무선 통신용 모듈을 통하여 센서 모듈로 전송한다. 베이스 모듈은 변위가 거의 발생하지 않는 지점에 설치하고, 센서모듈과 거리가 멀어질수록 센서 모듈의 RTK연산 결과의 정확도가 저하되기 때문에 가능한 센서 모듈과 가까운 거리에 설치하여야 한다.
3.3 센서 모듈
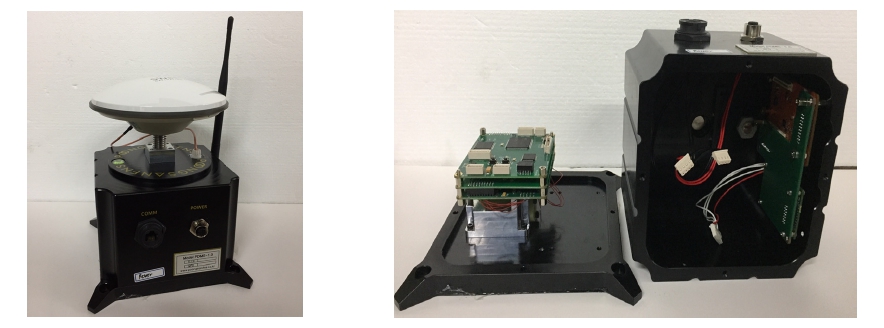
센서 모듈은 Fig. 1과 같이 센서부와 보드부로 구성되어 있다. 센서부는 저가의 RTK-GNSS 칩셋(piksi multi), GNSS 안테나(GPS500) 그리고 포스피드백 가속도계(PDMS 1.0)로 이루어져 있으며, 보드부는 가속도계 컨트롤러 보드, ADC 보드, MCU 보드 그리고 무선 센서 모듈(FreeWave, DDM2T)로 구성되어 있다. 센서 모듈 내의 포스피드백 가속도계는 풍산 FNS에서 개발한 군용 가속도계를 구조물 가속도 계측에 적합 하게 개선시킨 모델로, DC-10Hz 주파수 영역에서 MEMS형 가속도계보다 좋은 성능을 갖는다(Kwon et al., 2016).
센서 모듈의 RTK-GNSS 칩셋은 센서 모듈의 GNSS 안테 나로 수신되는 GPS L1/L2, GLONASS G1,G2 신호와 베이스 모듈로부터 수신되는 관측 메시지를 활용하여 계산된 변위 데이터와 시간정보, 속도 데이터를 10Hz의 샘플주파수로 MCU보드로 출력한다. MCU보드로 수신되는 시간정보를 트리거로 ADC보드에서는 포스피드백 가속도계의 아날로그 신호를 100Hz 샘플주파수의 디지털 신호로 변환하고, 이를 다시 MCU보드로 출력한다. MCU보드에서는 각각 다른 샘플 주파수로 수신되는 가속도 데이터(100Hz)와 속도, 변위 데이터 (10Hz)를 GNSS 시간 기준으로 시간동기화하여 한 개의 데이터 패킷으로 구성한다.
한 개의 데이터 패킷은 0.3초 간의 데이터를 포함하고 있으 므로, 30개의 가속도 데이터, 3개의 변위 데이터 및 시간정보를 포함하게 된다. 최종적으로 데이터 패킷은 UDP 프로토콜 방식으로 LAN 케이블을 통하여 컴퓨테이션 모듈로 전송되는데, 이 때 UDP 프로토콜 특성에 의한 데이터 손실을 방지하기 위하여 0.3 초간의 데이터는 매 전송때마다 0.2초간의 데이터를 중첩하여 전송한다.
4 실험 검증
개발 센서의 정밀도와 현장 적용성을 검증하기 위하여 미국 캘리포니아주에 위치한 San Francisco-Oakland Bay Bridge 의 East span에서 현장실험을 수행했다. 해당 교량은 미국의 대표적인 자정식 현수교로 주경간 길이 430m이다.
4.1 실험 개요
개발 센서의 성능 검증을 위해 수행한 현장실험의 개요는 Fig. 2와 같다. 센서 모듈의 RTK 연산을 위한 베이스 모듈은 교량의 변위가 거의 생기지 않는 교각 상부에 설치하였다. 센서 모듈은 컴퓨테이션 모듈과 같이 교량의 최대 처짐이 발생하는 주경간 중앙부 부근에 설치하여 해당 지점의 변위를 계측하였다, 본래 개발 센서 모듈은 GNSS 안테나와 센서 모듈이 일체화되어 구조물에 설치된 4~5m 높이의 폴대 위에 설치되어야 하나, 현장 실험 시에는 GNSS 안테나와 센서 모듈이 분리되어 센서 모듈은 교량의 바닥판에, GNSS 안테나는 삼각대 위에 설치 하였다.
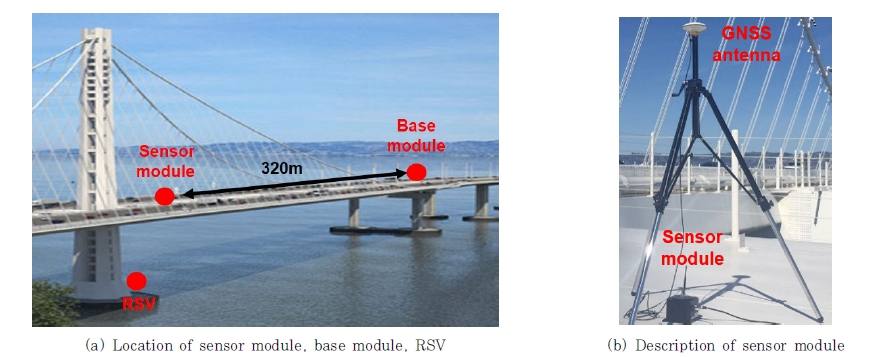
RSV(remote sensing vibrometer, RSV-E-150)를 교각 기초에 설치하여 레퍼런스 변위를 계측하였으며, RSV의 레이저 수신 세기를 높이기 위하여 센서 모듈 설치 지점의 하부(RSV 계측 지점)에 반사판을 설치하였다. 실험은 2시간동안 진행 하였으며, 개발 센서의 정밀도는 RSV로 계측한 변위를 레퍼 런스 변위로 하여 계산하였다.
4.2 실험 결과
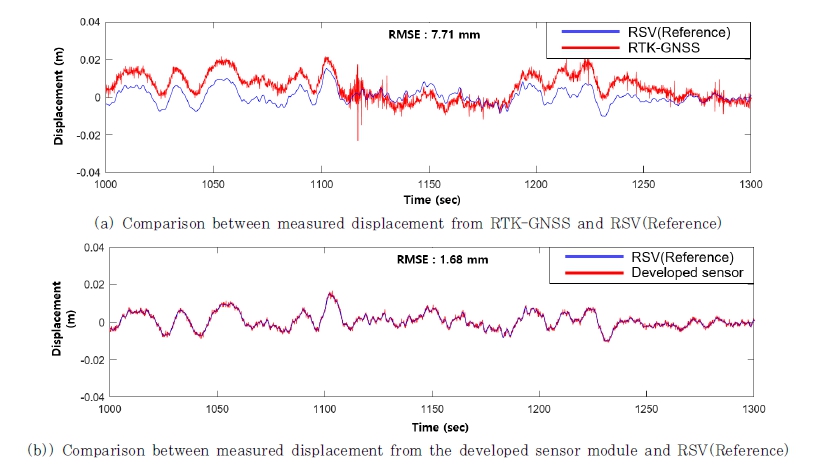
Fig. 3은 2시간의 계측 시간 중 5분간의 데이터를 RTKGNSS( piksi multi)로 계측한 변위(Fig. 3a)와 개발 센서 모듈로 계측한 변위(Fig. 3b)를 RSV로 계측한 레퍼런스 변위와 비교한 것이다. RTK-GNSS로 계측한 변위는 낮은 주파수 변위 오차와 높은 주파수의 계측 잡음이 혼재되어 있으며, 2시간의 계측 데이터를 통한 RMS 오차는 7.71mm이다. 반면, 개발 시스템으로 계측한 변위는 기존 RTK-GNSS 로 계측한 변위의 낮은 주파수 변위 오차와 높은 주파수의 계측 잡음을 제거하여 1.68mm의 RMS 오차(2시간 계측데이터 기준)를 확인하였다.
5 결 론
본 논문에서는 포스피드백 가속도계, RTK-GNSS에서 각각 측정한 가속도, 속도, 변위 데이터를 이단계 칼만필터로 융합 하여 고정밀 변위를 산정하는 시스템을 개발하고, 실제 교량에서 실험을 수행하여 변위 계측 정확도를 검증하였다. 개발 시스템은 고층빌딩, 해상교량에 일반적으로 사용하는 RTK-GNSS (샘플주파수: 최대 20Hz, 정밀도: 8~20mm)에 비해, (1) 샘플주파수가 100Hz로 높고, (2) 정밀도 1.68mm내외로 우수하며 (3) 3,000만원 내외의 가격으로 상용화 가능할 것으로 예상된다.
