

1. 서 론
선박 건조 시장의 요구를 맞추기 위하여 신속한 건조를 목표로 노력하고 있는 조선소에서의 선박 정도관리에 대한 요구는 갈수록 높아지고 있다. 보통 조선소 현장에서는 하나의 조립된 블록이 인접한 블록과 용접의 방식을 통한 초대형 블록 탑재 시 인접한 블록의 접합면을 기준으로 블록의 3D 모델에서 추출된 특이점과 측정된 점의 비교 작업을 수행하고 있다. 이러한 비교 작업은 경험이 많은 관리자를 통하여 측정된 점들과 3D 모델에서 추출된 특이점들의 대응점을 기준으로 좌표계 이동/회전변환을 이용하여 이루어지고 있다. 블록이 조립되면서 용접변형이 발생하기 때문에 선박 건조 과정에서 생산성의 향상과 생산 주기의 단축을 위한 선박 부재의 정도평가는 전 주기에서 수행되어야 한다. 따라서 선박 건조 과정에서 선박 블록의 정도를 제어하는 것이 가장 중요하다. 선박의 품질을 높이기 위하여 조선소에서 블록의 정도제어를 수행하는 것은 선박의 건조 주기를 단축할 수 있을 뿐만 아니라 건조 비용도 줄일 수 있다. 선박 블록의 정도 제어를 위한 선박 블록 통합 정도관리 시스템이 요구된다. 이 시스템은 “Non-allowance Shipbuilding”의 목표로 정도관리의 총괄성, 블록 정도의 향상, 정도관리 과정의 표준화 등이 이루어져야 한다. 일반적으로 정도관리를 수행하는 관리자가




Fig. 1과 같이 광파측정기를 이용하여 선박 블록의 접합면에 있는 주요 포인트(vital point)를 측정하고 수집하지만 무거운 계측 장비를 가지고 블록의 정도관리를 수행하는 것은 불편할 뿐만 아니라 시간도 오래 걸린다. 또한, 두 인접한 선박 블록은 도크 내에 탑재하기 전에 Fig. 2와 같이 용접변형으로 두 블록 사이의 접합면에서 튀어나온 부분과 과다한 용접 갭(gap)이 발생한다. 이로 인해 선박 블록의 탑재 시간이 지연될 수 있다.
본 논문에서는 선박 블록의 정도관리 시간을 단축할 수 있는 포인트 클라우드 기반의 3차원 레이저 스캐너를 이용한 선박 블록 탑재 전에 오차예측 방법을 제안하였다. 이 방법은 ICP (iterative closest point) 알고리즘으로 측정된 포인트 클라우드 점군과 3D CAD 모델에서 추출된 특이점 군의 비교 작업을 수행한 다음에 허용범위 내의 오차를 만족하는 지를 판단한다.
2. 관련연구
선박 건조 시장의 요구를 맞추기 위하여 전통적인 광파 측정기를 이용하는 3차원 계측 기술과 차별화된 새로운 3차원 정도관리 계측 기술이 개발되어야 한다. 특히 조선소 도크의 회전율은 선박 건조 주기, 생산성, 생산 비용, 생산의 안전성 등을 관련되어 있기 때문에 선박 생산단계에서 도크의 회전율은 가장 중요한 요소가 된다. 또한, 선박 건조 주기 내에 공정 단계가 많이 있으며, 이에 따라 블록의 오차로 인하여 건조 시간이 증가한다. 또한 외부 환경의 온도, 용접의 공법 등의 요인에 따라 선박 블록의 정도 치수에 영향을 미친다. 따라서 도크의 회전율을 향상시키기 위해 블록을 건조하는 공정에서 신속한 계측 수단을 통하여 용접으로 인해 누적된 오차를 미리 파악해야 한다. 블록을 도크로 운송하기 이전에 블록 자체가 포함하고 있는 오차를 제거해야하기 때문에 복잡한 선박 블록의 정도 치수가 허용범위 내의 오차를 만족하는 지를 확인하기 위하여 정확한 빠른 3차원 정도관리 시스템을 연구 하는 것이 매우 중요하다.
제한 조건을 가진 PDM(point distance method) 정렬을 이용한 TDM(tangent distance method) 정렬에서의 Sliding Error 최소화하는 연구에서는 주어진 두 판에 대한 3차원 스캔 점 데이터를 가지고 ICP 알고리즘으로 두 판을 매칭시켜서 Sliding Error가 감소시켰다(Hur et al., 2007). 또한, Lee는 다점 프레스 가공법(multi-point press method)을 통한 선박 외판 성형에 접근한 두 곡면의 정합을 위한 ICP 알고리즘을 적용하였으며(Lee et al., 2009), 의학 분야에서의 Seo는 뇌 내출혈종 수술을 위하여 가중 ICP 알고리즘 기반의 마커리스(markerless) 환자-영상 정합에 대한 연구에서 국소적 얼굴 형상 변형에 비교적 독립적인 특징영역을 설정하고, ICP 알고리즘을 이용하여 그 특징 영역의 가중치를 고려한 3차원 모델 정합 방법을 제시하였다 (Seo et al., 2012). Byun은 상대적 깊이 이미지를 활용하여 포인트 클라우드 데이터의 정합에 대한 연구에서 상대적 깊이를 계산하고 대응점을 찾아 3차원 데이터를 정합하는 방법을 제안하였다(Byun et al., 2014). 또한, Lee라는 연구자가 빠른 정합성 검토를 위하여 포인트 클라우드 데이터 기반의 증강현실 기술에 대한 연구에서 실물모델과 3D 설계모델을 정합시키기 위하여 포인트 클라우드를 활용하여 ICP 알고리즘을 적용하였다(Lee et al., 2014).
많은 연구에서 포인트 클라우드와 ICP 알고리즘을 활용 하였으며, 본 연구에서 사용하고자 하는 조선분야에서도 적용되었다. 하지만 선박 건조 주기나 건조 비용, 도크의 회전율 등과 관련된 선박 블록을 탑재하는 단계에서 블록 탑재 시간을 단축하기 위한 오차 예측에 적용한 연구가 진행되지 않았다. 따라서 다음 절에서 선박 블록 정합을 위한 포인트 클라우드 기반의 오차예측 방법에 대하여 다루고자 한다.
3. 포인트 클라우드 기반의 블록 오차예측 기술
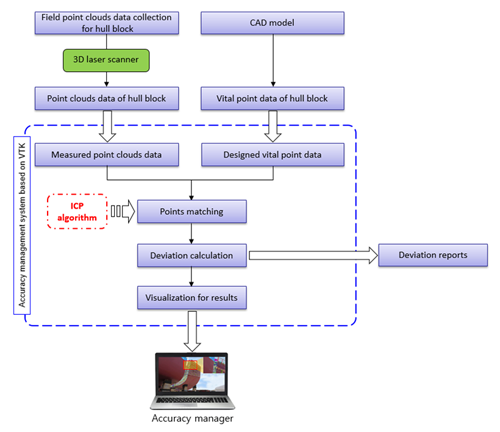
포인트 클라우드 기반의 선박 블록 정합을 위한 오차예측 방법은 Fig. 3에서 보이는 바와 같이 3차원 CAD 시스템 에서의 탑재하고자 하는 블록 접합면의 특이점 군을 추출한 다음, 정도관리 시스템에 입력한다. 또한 3차원 레이저 스캐너를 이용하여 탑재하고자 하는 선박 실 블록의 접합면을 스캔해서 얻은 포인트 클라우드 점 군 데이터을 정도관리 시스템에 입력한 뒤, 정도관리 시스템에서 획득한 블록의 CAD 모델의 특이점 군과 실 블록의 포인트 클라우드 점군의 비교 작업을 수행한다.
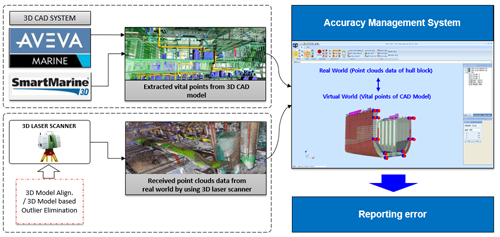
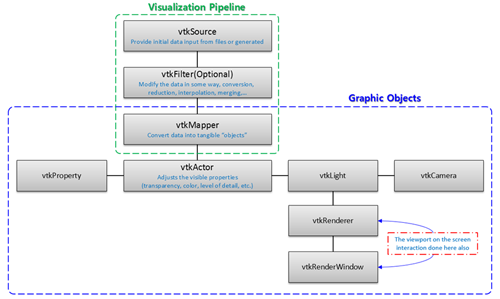
조선분야에서 선박이나 해양플랜트 등 대형 구조물을 설계 시 대형 구조물에 대한 정밀성이 요구됨에 따라, 전문적인 3차원 CAD 설계 소프트웨어로 AVEVA사의 AVEVA MARINE과 INTERGRAPH사의 SmartMarine 3D가 주로 사용된다. 이러한 정도가 높은 설계 소프트웨어에서 탑재된 선박 블록 접합면에 있는 특이점 군 데이터를 추출한 후 정도관리 시스템에서 활용하며, 또한 3차원 레이저 스캐너를 이용하여 탑재된 선박 실 블록 접합면을 스캔해서 얻은 실 블록의 포인트 클라우드 점 군 데이터를 정도관리 시스템에서 활용한다. 3차원 CAD 모델에서 나온 특이점 군 데이터와 실 블록 접합면의 포인트 클라우드 점 군 데이터의 매칭 결과를 가시화하기 위한 정도관리 시스템의 가시화 모듈은 VTK (visualization toolkit) 라이브러리를 활용하여 개발하고자 하였다. Fig. 4에서 보이는 바와 같이 VTK는 오픈소스 기반의 이미지 프로세싱, 가시화 등의 기능을 이루어질 수 있는 개발 라이브러리이며, 이 라이브러리 내에 이미지 프로세싱을 수행할 수 있는 많은 함수들을 제공한다. 이를 통해 정도관리 시스템에 입력된 3차원 CAD 모델에서 나온 특이점 군 데이터와 실 블록 접합면의 포인트 클라우드 점 군 데이터를 가지고 ICP 알고리즘을 이용하여 서로 매칭할 수 있다. ICP 알고리즘은 형상특징 기반의 포인트 정합 방법이며, Fig. 5에서 나타내고 있다. 같은 개수의 CAD 모델 접합면상의 특이점 군 데이터와 실 블록 접합면상의 포인트 클라우드 점 군 데이터 사이의 변환관계를 찾아서 두 점 군 데이터 집합 간의 변환행렬을 계산한 후, 변환된 위치에 대응하는 목표 점 군에 있는 대응점을 찾는다(Lee et al., 2009). 마지막으로 대응점 간의 오차를 계산해서 블록 접합면의 최종 오차 보고서를 출력한다.
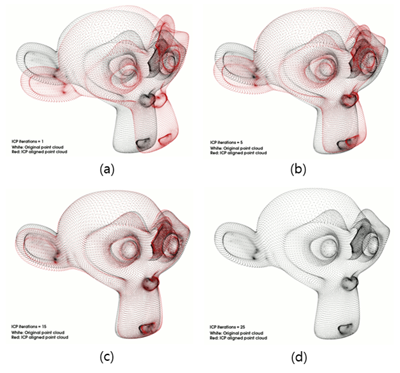
Figure 5
Points matching based on ICP algorithm (a) on the first iteration (b) on the fifth iteration (c) on the fifteenth iteration (d) on the twenty-fifth iteration
3.1 ICP 알고리즘
ICP 알고리즘은 3차원 공간에서 포인트 클라우드 점 군 데이터와 CAD 모델에서 추출된 특이점 군 데이터의 변환 관계를 찾아서 Besl과 McKay가 3차원 형상특징 기반의 포인트 정합 방법에 대한 연구에서 제안한 것과 같이 두 점 군 데이터 집합 간의 변환행렬을 계산한 후, 변환된 위치에 대응하는 특이점 군 데이터 집합 내에의 대응점을 찾을 수 있다(Besl et al., 1992).
3차원 공간에서 포인트 클라우드 점 군 데이터와 CAD 모델에서 추출된 특이점 군 데이터의 개수는 각각 N개를 가정한다. 3차원 공간에서 포인트 클라우드 점 군 데이터의 집합을 로 정의하며, CAD 모델에서 추출된 특이점 군 데이터의 집합(목적 데이터 집합)을 로 정의한다. 포인트 클라우드 점 군 데이터의 집합과 목적 데이터 집합의 개수는 각각 Np와 Nx을 정의하며, Np=Nx을 가정한다. 그리고 변화벡터는 로 정의할 수 있다. 회전 벡터는 을 만족해야 한다. 이동벡터는 로 정의 한다. 포인트 클라우드 점 군 데이터의 집합과 목적 데이터 집합의 매칭 작업을 수행한 후에 두 집합 간의 거리오차의 제곱의 합을 식 (1)과 같이 표현할 수 있다. 여기서 포인트 클라우드 점 군 데이터로부터 목적 데이터로 변환하는 회전행렬(R)은 식 (2)과 같이 나타날 수 있다.
을 최소화시키기 위하여 우선 포인트 클라우드 점 군 데이터의 집합(P)의 질량 중심()과 목적 점 군 데이터의 집합(X)의 질량 중심()을 계산해야 한다. 계산식은 식 (3),(4)와 같다.
두 점 군 데이터 집합의 질량 중심과 점 군 데이터를 이용하여 포인트 클라우드 점 군 데이터의 집합(P)과 목적 점 군 데이터의 집합() 사이의 교차공분산(cross-covariance) 행렬()을 식 (5)과 같이 계산할 수 있다.
식 (5)에 있는 각 항을 통해 4×4의 대칭행렬()을 정의할 수 있다. 다음 식 (6)과 같다.
여기서, 는 교차공분산 행렬에 대각선 요소들의 합이고, 는 비대칭 행렬 을 이용하여 구성하는 열 벡터(column vector)이고, I3는 3×3의 합동 행렬(identity matrix)이다. 식 (6)로 계산한 의 최대 고유 값(maximum eigenvalue)과 대응하는 최대 고유 벡터(maximum eigenvector)는 식 (7)과 같이 나타난다.
식 (7)에서 정의한 고유 벡터는 포인트 클라우드 점 군 데이터의 집합(P)로부터 적 점 군 데이터의 집합(X)로 변환하는 최적 회전변환이다. 그 다음에 식 (2),(3),(4)를 이용하여 최적 이동벡터()을 계산하면 식 (8)과 같다.
마지막으로 포인트 클라우드 점 군 데이터의 집합(P)로 부터 적 점 군 데이터의 집합(X)로 변환하는 최적 회전행렬과 최적 이동벡터를 이용하여 동차 변환행렬(T)을 구성할 수 있고, 식 (9)와 같다.
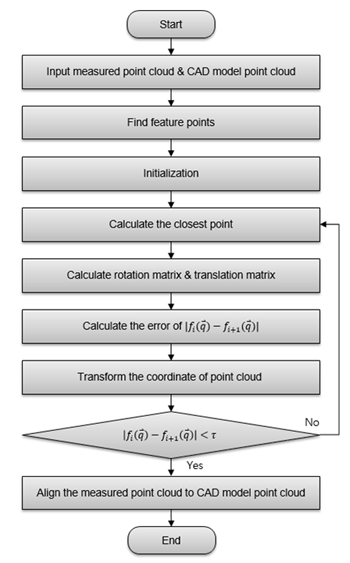
앞서 언급했던 ICP 알고리즘은 의 값이 지정한 임계값(threshold) 보다 작을 때까지 반복해야 한다. 이러한 ICP 알고리즘을 실행하는 절차는 Fig. 6과 같다.
3.2 포인트 클라우드 기반의 블록 오차예측 프로세스
선박 블록의 대조립 작업을 빠르고 안전하게 진행하기 위하여 도크 내에서 탑재하기 전에 각 블록의 오차예측 작업을 수행해야 한다. 블록의 오차를 측정하기 위하여 우선 실 블록의 포인트 크라우드 점 군 데이터와 CAD 모델의 특이점 군 데이터가 있어야 한다. 이러한 소스 데이터(source data)를 얻은 방법은 Fig. 7과 같이 선박 정도 관리자가 3차원 레이저 스캐너를 이용하여 블록의 접합면을 스캔해서 블록 접합면의 포인트 클라우드 점 군 데이터를 얻을 수 있는 것이다. 또한, Fig. 8과 같이 3차원 CAD 시스템에서 대응하는 블록 접합면에 있는 특이점 군 데이터를 추출할 수 있다.
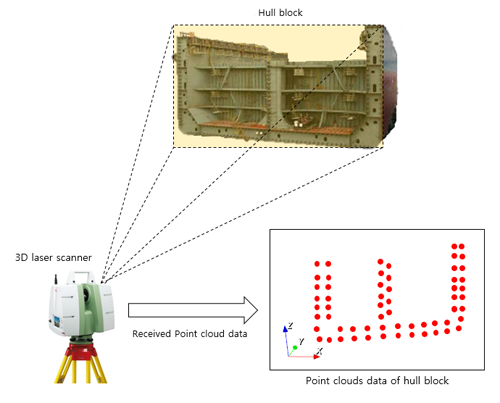
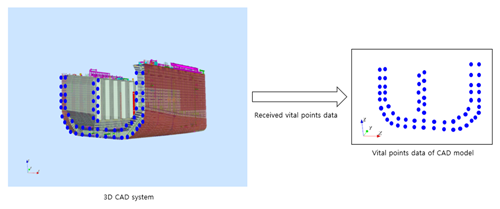
Fig. 9에서 도시한 바와 같이 실 블록 접합면의 포인트 클라우드 점 군 데이터와 3차원 CAD 모델에서 추출된 특이점 군 데이터를 VTK 기반의 정도관리 시스템에 입력한 후, 시스템은 두 점 군 데이터 집합을 대하여 포인트 매칭을 수행한다. 이 작업을 수행할 때, ICP 알고리즘을 통해 3차원 공간에서 포인트 클라우드 점 군 데이터와 특이점 군 데이터의 변환관계를 찾아서 두 점 군 데이터 집합 사이의 변환행렬을 계산하게 되며, 이 변환행렬을 이용하여 두 점군 데이터 집합 간의 대응점을 서로 매칭할 수 있다. 그런 다음, 오차를 계산하는 단계에 들어가서 식 (10)을 이용하여 서로 매칭시킨 대응점 간의 거리를 계산할 수 있다.
여기서, 3차원 공간에서 와 로 두 점을 가정한다. 은 두 점간의 거리이다. 따라서 서로 대응하는 점간의 오차거리는 식 (10)을 이용해서 구할 수 있다. 단, 구한 오차거리 은 허용범위 내의 오차 dallow을 만족하는 지를 일일이 확인해야 한다. 마지막으로 모든 대응점 간의 오차거리, 허용오차 만족 여부 등의 정보를 정도관리 오차 보고서에 표시할 수 있도록 출력하여 정도관리 시스템의 인터페이스에서 대응점을 매칭시킨 후의 상태를 가시화하게 된다. 오차 보고서를 통해 오차가 많이 발생한 위치에 대해서 블록을 도크로 움직인 전에 특수 가공법을 이용하여 허용오차 법위 내로 오차를 줄이게 된다.
4. 블록 오차예측 결과 및 분석
4.1 프로토타입 테스트
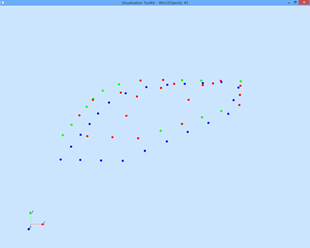
본 절에서는 제안한 선박 블록 오차예측 방법의 가능성을 검토하기 위하여 프로토타입의 테스트를 수행하였다. 3차원 CAD 시스템에서 블록의 모델을 이용하여 선박 블록의 Hopper Tank 부분의 특이점 군 데이터를 추출하였으며, 3차원 레이저 스캐너를 이용하여 같은 위치의 포인트 클라우드 점 군 데이터를 얻었다. 특이점 군 데이터와 포인트 클라우드 점 군 데이터의 비교 작업을 ICP 알고리즘을 적용해서 수행하였다. VTK 라이브러리를 활용하여 구현한 결과는 Fig. 10과 같다. 그리고 계산된 회전행렬과 이동행렬이 Table 1과 같이 나타난다. Fig. 10에서 파란색 점군 데이터는 포인트 클라우드 점군 데이터이고, 빨간색 점군 데이터는 CAD 모델에서 추출된 특이점 군 데이터를 나타낸다. 초록색 점군이 있는 위치는 두 점 군을 매칭시킨 후에 포인트 클라우드 점군의 이동/회전한 위치이다.
4.2 결과 분석
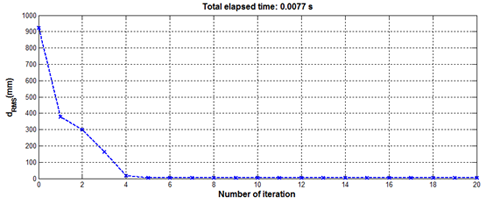
VTK로 구현한 결과를 검증하기 위하여 MATLAB를 통해 포인트 클라우드 점군 데이터와 CAD 모델에서 추출된 특이점 군 데이터의 매칭 프로세스를 다시 수행하였으며, 결과를 Fig. 11에서 보이고 있다. 회전행렬과 이동행렬은 Table 2에서 나타내고 있다. Table 1과 2를 비교해 보면, VTK에서 계산된 회전행렬과 이동행렬은 MATLAB를 이용하여 계산된 결과와 비슷하게 나타난다. ICP 알고리즘을 통하여 계산을 5회 이상 반복한 결과, RMS(root mean square) 오차가 5.3965mm에서 수렴하였고, ICP 알고리즘은 20번을 반복 하였을 때까지 걸린 시간은 0.0077sec 걸렸으며, Fig. 12와 같다.
대응점 간의 오차는 Fig. 13에서 나타내고 있다. 11번 대응점 간의 직선 오차거리가 제일 크고, 9.3382mm의 오차가
Table 2
Rotation matrix and translation matrix for point cloud matching process from MATLAB
| Rotation matrix | |
| Translation matrix | [1.5007 -2.0005 0.5460] |
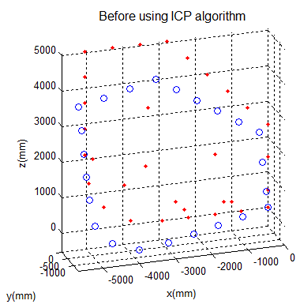
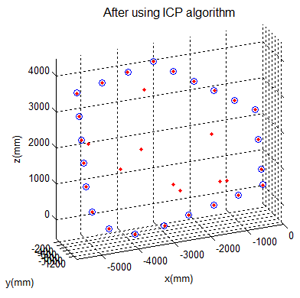
Figure 11
Result of point cloud matching by using MATLAB (a) before using ICP algorithm (b) after using ICP algorithm(blue circle: target point data set, red point: source point data set)
발생하였으며, z축의 “+”방향에서 오차는 6.8258mm로 가장 크게 발생하였고 11번 대응점 간의 x축의 “+”방향에서 오차는 6.0880mm로 가장 크게 발생하였다. 또한 8번 대응점 사이의 y축의 “-”방향에서 오차는 6.5293mm로 가장 크게 발생하였다.
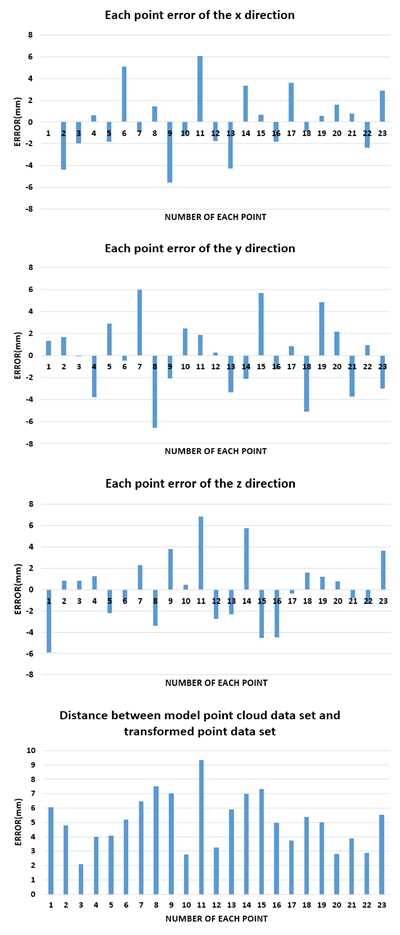
테스트 통하여 획득한 결과를 종합적으로 분석하였다. 선박 블록 정합을 위하여 ICP 알고리즘을 적용한 점군 데이터의 매칭과 대응점 간의 오차예측을 수행하였다. 대부분의 오차 값은 조선소에서 요구 정도 범위(±7mm) 내로 들어오는 것을 확인할 수 있다. 다만, 3차원 레이저 스캐너를 이용하여 얻었던 포인트 클라우드 점군 데이터 중에 Fig. 11을 보이는 것과 같이 제거할 수 없는 잡음 데이터(noise data)의 존재로 일부 오차 범위를 벗어나는 것을 확인할 수 있다. 따라서 점군 정합의 정밀도를 높이기 위하여 포인트 클라우드 점군은 CAD 모델에서 추출된 특이점 군과 정합하기 전에 잡음 데이터를 제거하는 전처리 과정이 필요하며, 본 논문에서는 선박 블록의 Hopper Tank 형상을 특징구역으로 설정하여, 3차원 레이저 스캐너를 이용하여 얻었던 포인트 클라우드 점군 데이터에 대해서 특징구역 외부에 있는 잡음 데이터를 제거하였다. 그러나 특징구역 내부에 있는 잡음 데이터의 경우에는 제거 하기 까다로워 별도의 잡음 데이터를 제거하지 못하였기 때문에 두 점군의 정합작업에 영향을 미친 것으로 확인하였다.
5. 결론 및 향후연구
본 연구에서는 선박 블록 정합을 위하여 제안한 포인트 클라우드 기반의 오차예측 방법으로 3차원 CAD 시스템에서 블록의 모델을 이용하여 선박 블록의 Hopper Tank 부분에서 추출된 특이점 군 데이터와 실 블록의 포인트 클라우드 점 군 데이터를 활용해서 두 점군을 매칭시켰다. 실험결과에서 대응점 간의 매칭 오차가 발생하였으며, 대부분의 오차 값은 조선소에서 요구정도 범위(±7mm) 내로 들어왔다. 다만, 3차원 레이저 스캐너를 이용하여 얻었던 포인트 클라우드 점군 데이터 중에 제거할 수 없는 잡음 데이터(noise data)의 존재로 일부 오차 범위를 벗어나는 것을 확인할 수 있었다. 따라서 정도관리의 정밀도를 높이기 위하여 향후연구에서는 Hopper Tank 형상의 기반으로 설정한 특징구역의 내부에 있는 잡음 데이터의 제거 방안에 대한 연구를 중점적으로 진행할 예정 이며, 이를 통해 오차를 더 줄인다면 조선소에서 정도관리 방법 중 하나로 활용할 수 있을 것으로 판단한다.
최종적으로 조선소의 선박 정도관리에 본 연구에서 제안 하는 방법을 적용한다면 선박 건조 시간을 단축시킬 수 있을 뿐만 아니라 건조 비용도 감소시키는 효과를 가져올 것으로 기대한다.
