

1. 서 론
2. 본 론
2.1 비선형 트러스 요소 정식화
2.2 비틀림 스프링 요소 정식화
2.3 접선 강성행렬의 어셈블리 과정
2.4 비선형 해석 방법
3. 수치 예제
3.1 인장 좌굴 해석해와 메커니즘
3.2 음의 포아송 효과를 가지는 링크 기구 모델
3.3 수치 예제 결과 및 고찰
4. 결 론
1. 서 론
좌굴 현상은 과거 18세기 Musschenbroek(1739)에 의해 실험적으로 연구가 진행되었으며, Euler(1757)에 의해 미분 방정식으로 좌굴 현상을 정식화가 되었다. 이를 특별히 오일러 임계 하중이라고 부르며, 식 (1)과 같이 표현한다.
이처럼 일반적으로 우리에게 널리 알려진 좌굴 현상으로는 균일한 단면을 가진 보에 압축 하중을 인가했을 때, 물체 내부에 작용하는 효과적인 굽힘 강성이 0이 되어, 약간의 외란만 작용해도 측변으로 큰 변형이 생기는 현상이다. 한편 인장 좌굴 현상(tension buckling phenomenon)에 대해서는 그렇게 널리 알려지지 않았으며, 비교적 최근에 연구가 진행되었다.
고무와 같은 재료에서 보에 대한 인장 좌굴 현상 연구를 시작으로 전단 강성이 상대적으로 인장 강성보다 작은 복합재료로 구성된 보에 대한 인장 좌굴 연구가 있었다(Hodges et al., 2006; Kelly and Takhirov, 2003). 슬라이더가 부착된 구조물에 대해 인장 좌굴 현상을 이론 및 실험적으로 연구를 진행했다(Bigoni et al., 2012; Misseroni et al., 2015; Zaccaria et al., 2011). 최근 연구에서는 조심스럽게 인장 좌굴에 대한 정확한 수학식은 존재하지 않는다고 주장하며, 이를 에너지 관점에서 그 타당성을 증명했다(Simão and da Silva, 2020). 대표적인 논쟁으로는 외팔보의 인장 좌굴 발생 여부가 있다. 외팔보 자유단의 수직 변위 한계 때문에 인장 좌굴 현상이 발생하지 못하지만, 이러한 구조적인 한계를 극복할 수 있다면, 인장 좌굴 현상은 실제로 구현될 수 있다. 구조적인 한계를 극복하기 위해 스프링이 부착된 모델 및 슬라이더가 부착된 모델 등 다양한 모델이 제시되어 왔다. 인장 좌굴의 메커니즘의 이해가 중요했었기 때문에 이런 모델들에 대한 해석해가 주로 연구되어 왔다. 따라서 비선형 유한요소 모델을 이용한 연구는 상대적으로 주목받지 못했다.
일반적인 비선형 유한요소법 자체는 많은 연구가 이루어져 있다. Wasfy(1996)은 다물체 강체 시스템에 대한 대변형을 고려한 유한요소 보 모델을 개발했다. 평면 철제 프레임의 거동에 대한 절점 연결의 유연성과 감쇠 효과를 설명하기 위하여 구조의 비선형 연결 거동과 기하학적 비선형성을 모두 포함하는 수치 모델도 개발되었다(Sekulovic et al., 2002). 굽힘 강성과 길이가 다른 두 개의 부재가 선형 비틀림 스프링으로 연결된 외팔보에 대한 후좌굴 연구가 수행되었다(Caddemi et al., 2013, 2015; Dado et al., 2004). 한편 Greco 등(2006)은 3차원 트러스 유한요소를 절점 변위가 아닌 절점 위치에 기초하여 개발하였다. Izzuddin(2006; 2007)은 구조물의 좌굴해석에 있어 굽힘 강성을 비틀림 스프링으로 단순화하여 수행하는 방법론을 제시하였다. Numic 등(2022)은 다수의 비틀림 스프링을 이용하여 압축 좌굴 메커니즘의 분석에 관한 이론 및 실험적으로 연구를 진행했으며, 강성 보상(stiffness compensation)에 대한 방법을 제시하였다. 지금까지의 방법론들은 기하 비선형만을 고려한 트러스 또는 비선형 항을 비틀림 스프링으로 대체하는 연구 등에 집중되어 있다. 따라서 기하학적으로 정확한 비선형 트러스 요소와 비틀림 스프링을 결합한 정식화가 필요하다.
본 논문에서는 선행 연구 결과들을 바탕으로 간단한 시스템에 대해 인장 좌굴 메커니즘을 설명하고, 비선형 트러스 요소와 비틀림 스프링 요소에 대한 정식화를 수행한다. 비선형 해석을 위해서 고전적인 뉴턴 방법과 변위와 힘을 동시에 제어하는 일반화된 변위 제어 방법(Generalized displacement control method)(Leon et al., 2011; Yang and Shieh, 1990)을 적용하였다. 시뮬레이션 결과는 해석해와 상용 유한요소해석 프로그램의 결과와 비교하여 검증하였다. 개발된 유한요소 모델을 이용하여 각기 다른 메커니즘으로 인장 좌굴을 이용하는 트러스 구조들을 제시하고, 그에 따른 음의 포아송 비 효과를 설명한다.
2. 본 론
일반적으로 비선형 문제를 해석하는 방법으로는 뉴턴법이 많이 사용하며, 비선형 내력에 대한 접선 강성행렬의 계산이 필요하다. 이 장에서는 비선형 트러스 요소와 비틀림 스프링 요소에 대한 정식화를 수행하고, 비선형 해석법인 뉴턴법과 일반화된 변위 제어법을 소개한다.
2.1 비선형 트러스 요소 정식화
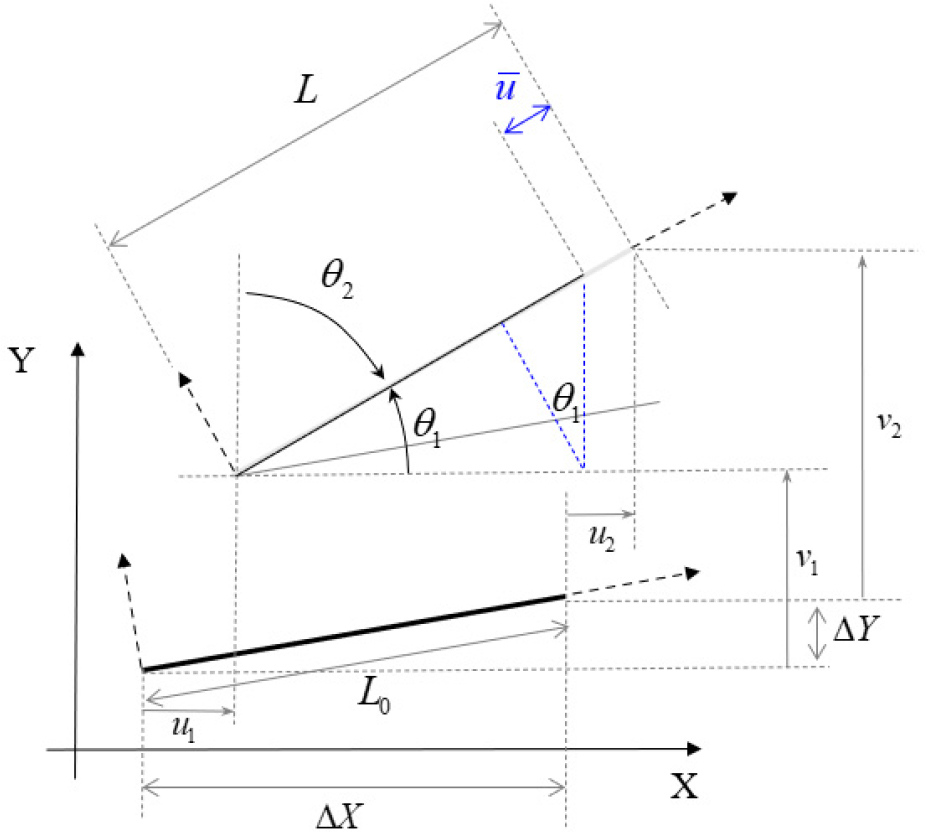
Fig. 1과 같이 트러스의 변형 전과 변형 후의 늘어난 길이를 즉, 변위를 식 (2)와 같이 나타낼 수 있다.
여기서 이며, Fig. 1에서 보이는 것처럼 기하 관계를 아래와 같이 나타낼 수 있다.
식 (2)는 식 (3)의 기하 관계식을 이용하여 다음과 같이 나타낼 수 있다.
식 (4)에서 이며, 요소 하나에 대한 변위 벡터이다.
이제 가상일 원리(virtual work principle)를 이용하여 비선형 트러스 요소에 대한 접선 강성행렬을 계산한다.
식 (5)에서 이며, 내부힘()에 대해서 변분을 취하면 아래와 같이 쓸 수 있다.
식 (6)에서 과 에 대해서 변분 과정을 수행하면 식 (7)과 같이 나타낼 수 있다.
식 (7)을 식 (6)에 대입하여 정리하게 되면 식 (8)과 같이 표현할 수 있으며, 최종적으로 비선형 트러스 요소에 대한 접선 강성행렬 을 아래와 같이 계산할 수 있다.
2.2 비틀림 스프링 요소 정식화
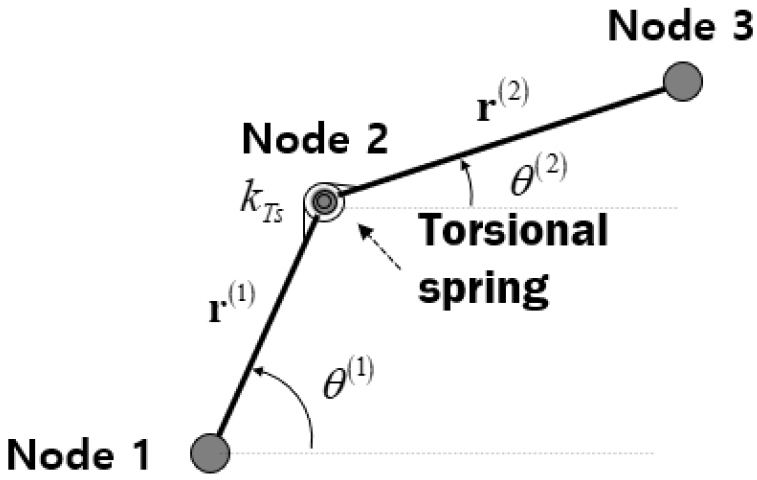
앞서 정식화된 기하학적으로 정확한 비선형 트러스 요소에 비틀림 스프링(torsional spring)을 부착하게 되면 Fig. 2와 같다. 이때 주의할 점은 비틀림 스프링에서의 각은 트러스 부재의 대변형으로 인하여 비선형 관계식을 가지게 된다는 것이다. 회전각 𝜃값을 식 (3a)에 주어진 수평성분 길이 과 수직성분 길이 의 비로 식 (9)와 같이 나타낼 수 있다.
여기서, 𝜃에 대해서 변분을 취하게 되면 식 (10)과 같다.
이제 최소 총 전위 에너지 원리(minimum total potential energy principle)를 사용하여 평형방정식을 계산할 수 있다. 내부 에너지만 고려하면 식 (11)과 같이 쓸 수 있다.
여기서, 는 비틀림 스프링 상수이다. 식 (11)에 식 (10)을 대입하고 정리하면 아래와 같다.
식 (12)에서 이며, 이와 유사한 방법으로 와 같이 표현할 수 있다. 식 (12)에 변분을 취함으로써 접선 강성행렬을 구할 수 있으며 아래와 같다.
이제 과 에 대해 변분 과정을 수행하면, 식 (14)와 같이 나타낼 수 있다.
식 (13)은 식 (14)을 이용하여 식 (15a)와 같이 표현할 수 있으며, 마찬가지로 도 식 (15b)로 나타낼 수 있다.
식 (15)는 절점 1과 절점 2 사이의 관계식에 대한 변분이며, 이와 유사한 방법으로 절점 2와 절점 3에서의 관계식도 내부 힘의 항으로 아래와 같이 표현할 수 있다. 식 (16)에 대한 자세한 변분과정은 식 (15)의 계산과정과 같으므로 생략한다.
2.3 접선 강성행렬의 어셈블리 과정
앞 절에서는 비선형 트러스 요소와 비틀림 스프링 요소의 정식화 과정을 수행하였다. 이제 접선 강성행렬의 어셈블리 과정이 필요하다. 그러나 비틀림 스프링이 부착되었을 때 어셈블리 과정이 일반적이지 않기 때문에 이 절에서는 그 과정을 자세히 다루고자 한다.
일반적인 스프링 요소는 길이가 없는 트러스 요소로 생각할 수 있지만, 비틀림 스프링 요소의 경우에는 다르다. Fig. 2와 같이 비틀림 스프링이 과 의 공유하는 노드 2번에 부착되어 있지 않고, 의 노드 1번에 단일로 부착되었을 때는 앞서 정식화를 수행한 식 (15a)에서 인접한 요소의 영향을 제거하여 아래와 같이 표현할 수 있다.
여기서, 는 비틀림 스프링 요소의 접선 강성행렬이며, 이와 같은 방법으로 만약 공유하고 있는 노드가 아닌 단일 노드에 비틀림 스프링이 부착되었다면, 식 (17)과 마찬가지로 접선 강성행렬을 계산해야 한다.
비틀림 스프링이 결합한 부재(member)의 위치에 따른 접선 강성행렬을 Table 1에 정리하였다. 이처럼 비틀림 스프링이 부착된 구조물에서는 𝜃값 계산이 필요하며, 선형 트러스 유한요소와는 다르게 강성행렬의 계산이 다소 복잡하다. 만약 비틀림 스프링이 부착된 구조물의 문제를 풀기 위해 회전 자유도를 가진 보(beam) 요소를 사용한다면, 스프링은 선형이기 때문에 탄성에너지 표현은 단순화될 수 있다. 그러나 보 요소를 사용하여 정식화를 수행한다면, 회전 자유도만 비틀림 스프링에 연결되기 때문에 더 복잡한 어셈블리 과정이 요구된다. 한편 연결 부위의 변위 연속 조건을 부과하면 접선강성 행렬의 밴드가 커지며, 이를 방지하기 위해 페널티 방법을 사용하면 특이점(singularity)이 발생할 가능성이 매우 크다. 이와 같은 문제를 해결하기 위해 본 연구에서는 비선형 트러스 요소에서 𝜃값 계산하는 방법으로 정식화를 수행하였다. 본 연구에서 제시한 방법론은 정식화가 다소 복잡하지만, 비선형 보 요소를 사용한 결과와 다르게 수치적 오차가 발생하지 않다는 장점을 갖고 있다.
Table 1.
The tangent stiffness matrices of torsional springs for the types of attached members
| Case | tangent stiffness matrix |
| Single member | |
| Between members () | |
| Single member | |
| Between members () |
2.4 비선형 해석 방법
일반적인 비선형 방정식에 대한 풀이 방법으로 뉴턴법이 있다. 이는 대표적인 힘 또는 변위 제어 방법으로 널리 알려졌지만, 기울기가 급격하게 바뀌거나 변위 또는 하중이 줄어드는 스냅-백(snap-back) 현상을 추적하지 못하는 한계가 있다. 본 연구에서 다루는 인장 좌굴 현상을 수치 모사하기 위해서는 이러한 스냅-백 현상을 추적할 필요가 있으므로 고전적인 방법은 적합하지 않다. 따라서 힘과 변위가 동시에 감소할 때도 평형점을 찾기 위해선 힘과 변위를 동시에 제어할 수 있는 방법론을 적용하여야 한다. 호장 증분법(Arc-Length method)은 대표적인 힘-변위 제어법이며, 비교적 최근에 개발된 일반화된 변위 제어 방법(Generalized displacement control)(Yang and Shieh, 1990)이 대부분의 비선형 거동을 안정적으로 추적할 수 있어 널리 사용되고 있다.
이 절에서는 잘 알려진 뉴턴법에 대한 설명은 생략하고, 일반화된 변위 제어 방법을 간략하게 소개하고자 한다. 일반적인 비선형 방정식은 내부 힘과 외부 힘의 평형으로 식 (18)과 같이 쓸 수 있다.
이 식에 변분을 취하고 구속조건을 적절하게 표현하면 아래와 같다(Yang and Shieh, 1990).
여기서, 첨자 i는 반복 단계를 나타내며, 상수 행렬 , 상수 𝜇 그리고 매개변수 을 어떻게 정하느냐에 따라 다양한 방법론이 나올 수 있다. 변위 증가분은 식 (20)과 같이 구분하여 표현한다.
이 식을 식 (19)에 대입하고 정리하면 하중 반복 증분을 식 (21)과 같이 계산할 수 있다.
참고문헌(Yang and Shieh, 1990)에서는 구속 식 (19)에 사용하는 매개변수를 식 (22)와 같이 제안하였다.
각 스텝(step)의 첫 단계에서는 이므로, 이를 이용하여 반복 첫 단계에서의 하중 증분을 식 (23)과 같이 얻을 수 있다.
여기서, 전 단계의 변위 증분이 0이므로, 현재 단계의 변위 증분과 같음을 이용하면, 반복 첫 단계의 하중 증분은 다음과 같다.
여기서, 은 초깃값으로 사용자가 설정해주어야 한다. 식 (24)에서 루트 안에 있는 값을 ‘일반화된 강성 매개변수’(GSP; Generalized Stiffness Parameter)라 부르며 하중의 방향을 바꾸는 데 결정적인 역할을 하게 된다. 중요한 부분은 GSP의 값이 음수일 때마다 전 단계의 값과 반대 방향으로 하중 방향이 바뀌게 된다는 것이다.
3. 수치 예제
이 장에서는 간단한 시스템에 대한 인장 좌굴 현상을 소개하고 비선형 트러스 유한요소 해를 해석해 그리고 상용소프트웨어 결과들과 비교한다. 음의 포아송 효과를 가질 수 있는 구조에서의 인장 좌굴 효과를 적용하기 위한 수치 모델들을 제시하고자 한다.
3.1 인장 좌굴 해석해와 메커니즘
인장력에 의해 좌굴이 일어난다는 것을 비교적 새로운 개념이며, 당연하게도 균일한 단면을 가진 외팔보에 인장력을 인가하면 좌굴이 일어나지 않는다. 즉 인장력이 가해지는 방향으로 늘어나면서 큰 횡 방향 변위가 발생할 수 있는 구조에서만 가능하다. 이러한 구조는 보의 중앙에 슬라이더 등을 삽입함으로써 가능하다. 본 연구에서는 별도의 장치없이 간단한 링크 구조에서도 비틀림 스프링만을 부착하여도 인장 좌굴 현상을 구현할 수 있음을 보이고자 한다. 이를 위해 Fig. 3과 같은 간단한 링크 장치를 생각해 보자.
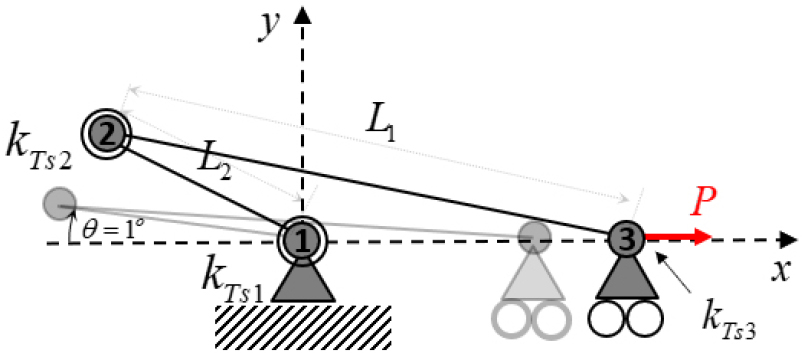
Fig. 3에서 절점 3에 인장력을 인가할 때, 하중 벡터와 그에 따른 변위 벡터에 대해 내적을 취하면 양수 값을 가지게 된다. 이처럼 에너지가 양수 값을 가지면 일(work)한다고 보며, 에너지 관점에서 그 타당성을 가질 수 있게 된다. 즉 인장력이 가해진 방향으로 반드시 변위가 발생해야 한다. 좌굴은 절점 1과 절점 2 사이의 링크에서 발생한다. 이 링크에 작용하는 압축력이 비틀림 스프링에 의한 굽힘 강성을 상쇄하게 되면 효과적인 굽힘 강성이 0이 되어 순간적으로 절점 2의 횡 방향 변위가 커지게 된다. 이는 가시적으로 마치 인장력에 의해 인해 좌굴이 일어나는 것처럼 보이게 된다.
Fig. 3과 같은 간단한 링크 기구에서 인장 좌굴 현상을 식을 이용하여 확인하기 위한 총 전위 에너지는 식 (25)와 같다.
이 식을 최소화하면 평형 방정식을 얻을 수 있고, 임계 좌굴 하중을 아래와 같이 표현할 수 있다.
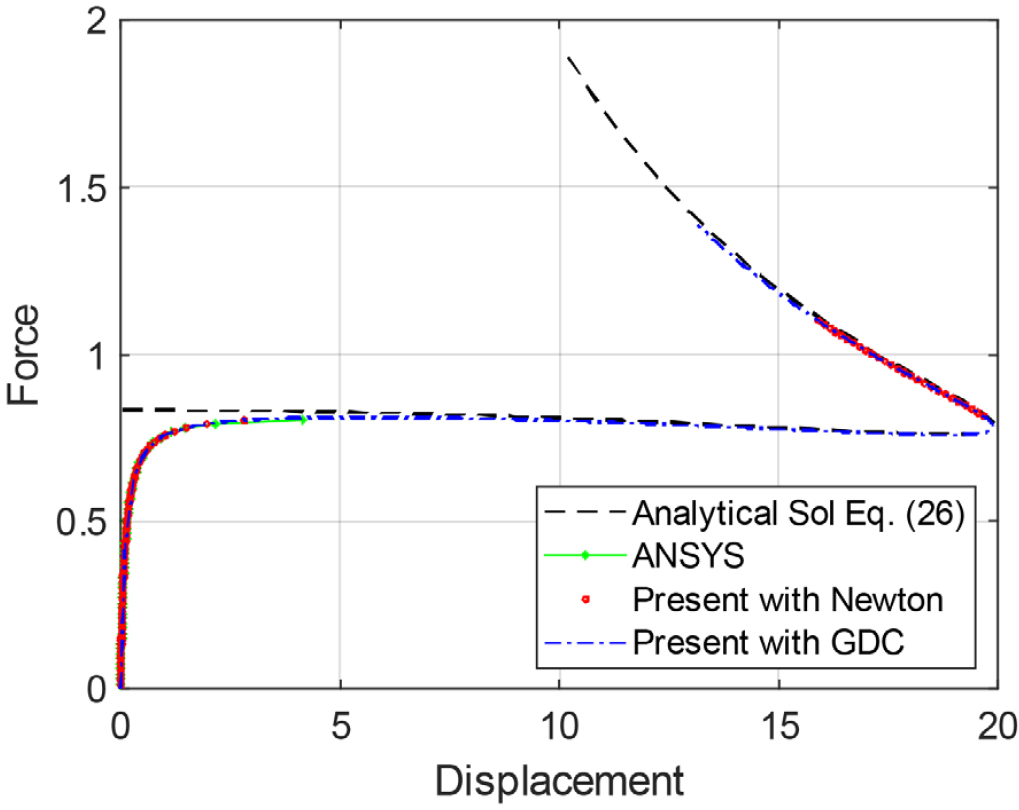
인장 하중에 대한 이론해 식 (26)과 비틀림 스프링을 가지는 비선형 트러스 유한요소의 결과들을 Fig. 4에 비교하여 도시하였다. 그림에서 수평 축은 절점 2에서의 수직변위를 수직 축은 절점 3에 가해지는 인장력이다. 일반화된 변위 제어법(GDC)을 적용했을 때 해석해와 같은 결과를 얻을 수 있었으며, 전형적인 후좌굴(post-buckling) 거동과 매우 유사함을 알 수 있다. 본 연구에서 개발된 유한요소 모델의 정확도를 확인할 수 있는 벤치마크 성격의 예제이다.
3.2 음의 포아송 효과를 가지는 링크 기구 모델
음의 포아송 효과는 축 방향으로 인장이 인가될 때 횡 방향으로도 늘어나는 효과를 가지는 구조에서 볼 수 있다. 이 효과는 국소적으로는 부재 수준에서는 일반적인 양의 포아송 비를 가지지만 거시적으로는 음의 포아송 비를 가지는 것처럼 보인다. Fig. 5와 같은 박스형 트러스 구조가 박스형 구조물 내부에 있다고 상상해 보자. 이 때 축 방향으로 인장력을 인가하면 특정 인장력 이상에서 축 방향 변위와 동시에 횡 방향으로 큰 변형을 유발하는 구조를 설계할 수 있다.
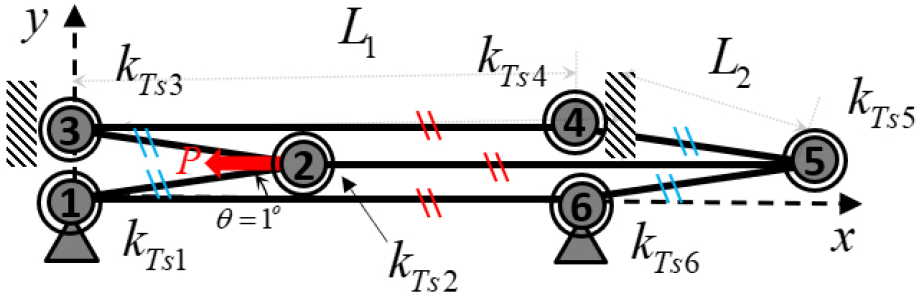
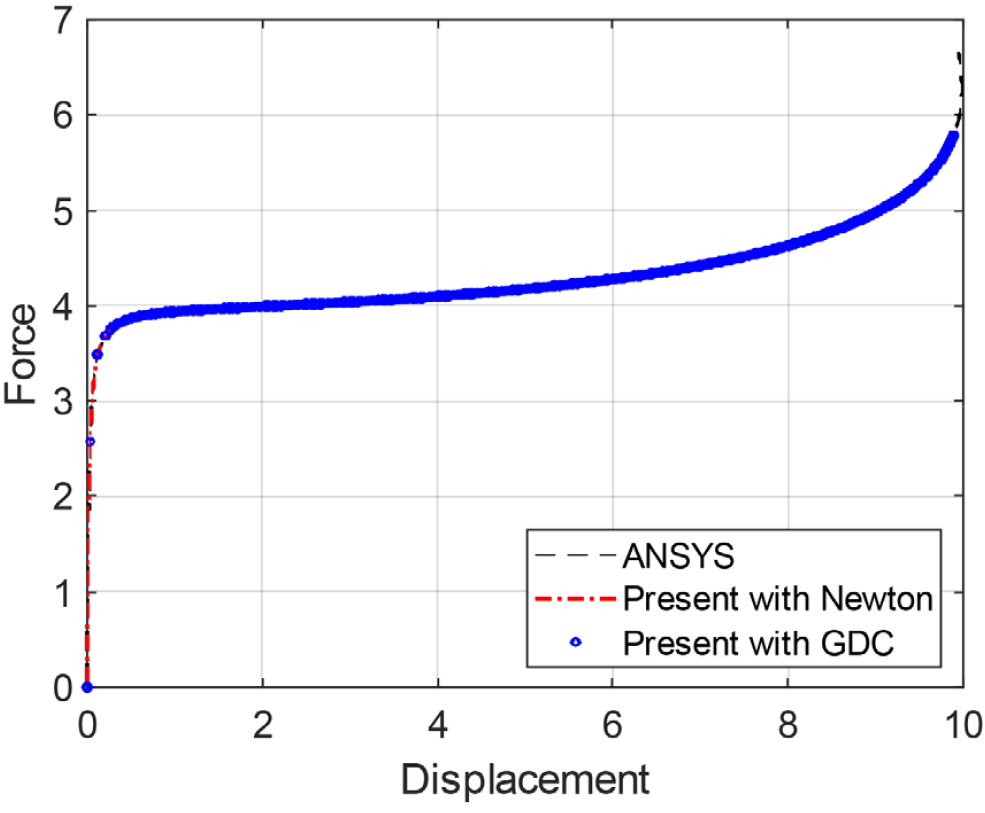
Fig. 5의 링크 기구에서 각 절점에 부착된 비틀림 스프링 상수들을 적절하게 조절하면, Fig. 4에서와는 다르게 하중이 증가함에 따라 횡 방향 변위가 줄어들지 않게 만들 수 있다. 이러한 경우에는 고전적인 뉴턴법 그리고 일반화된 변위 제어법이 같은 결과를 보여준다. 인장력이 인가되는 절점 2에서의 횡 방향 변위 대 인장력 곡선을 Fig. 6에 도시하였다. Fig. 3의 단순 링크 기구와 마찬가지로 절점 1과 절점 2 사이에 위치한 부재처럼 수평위치에서 수직위치로 변하는 부재들에는 국소적으로 압축력이 발생하여 인장력에 의해 좌굴이 발생하는 것처럼 보인다. 이러한 링크 기구는 일반적인 음의 포아송 효과를 가지는 구조와는 다르게 기계적 스위치처럼 특정 인장력 이상에서 음의 포아송 효과를 보이는 구조이다. 또한 여러 개의 부재들을 사용함으로써 높은 인장력 하에서 좌굴을 유도할 수 있다는 장점이 있다.
한편 보다 단순한 형태의 링크 기구도 설계할 수 있다. 상대적으로 적은 인장력에서 좌굴을 유도할 필요가 있을 때는 Fig. 7에 도시된 날개형 링크 기구를 사용할 수 있다. 앞의 구조들과는 다르게 좌굴 후에 좌굴 하중 보다 낮은 하중에서도 평형상태를 유지할 필요가 있을 때 사용할 수 있는 대표적인 링크 기구이다.
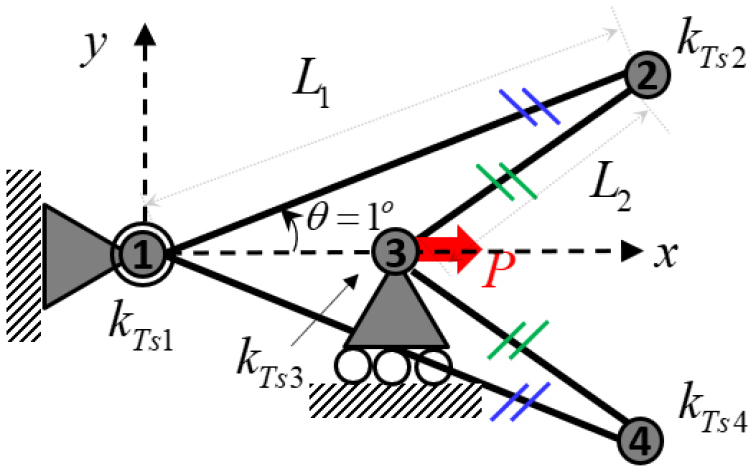
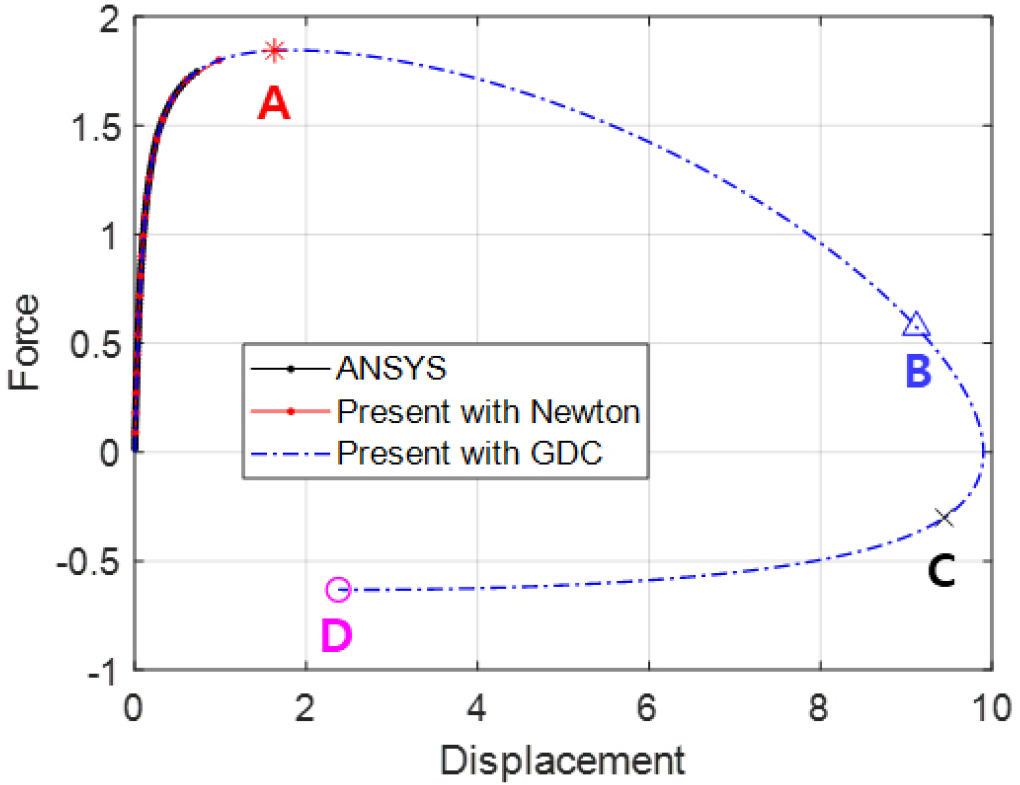
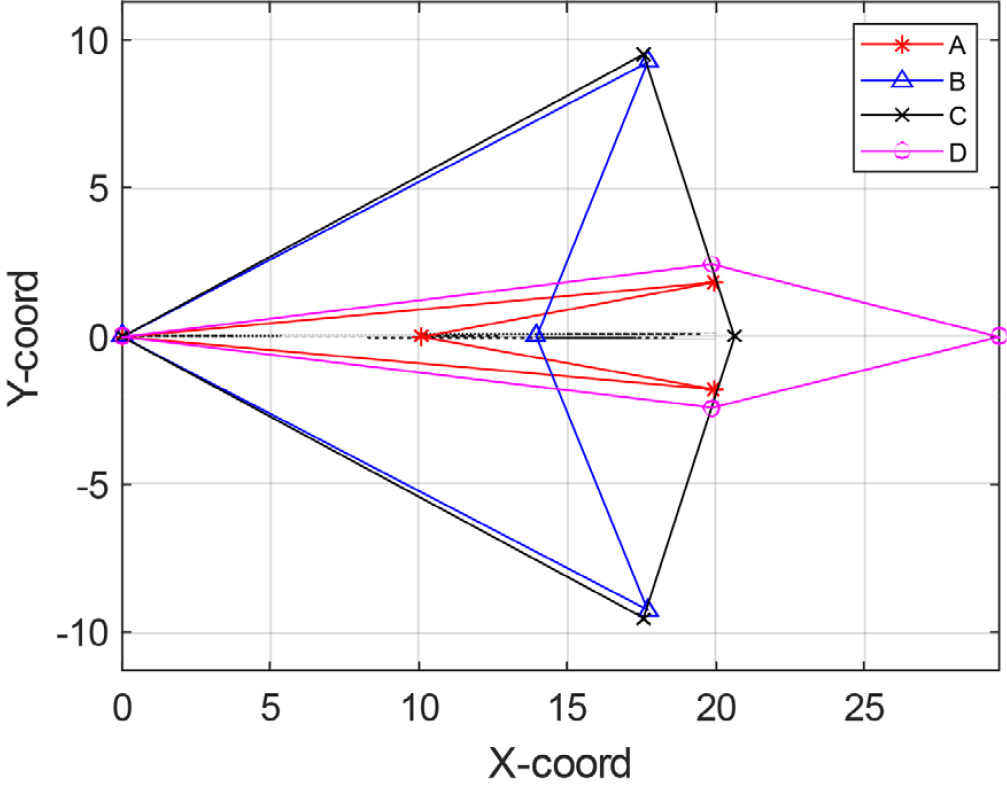
날개형 링크 기구(see Fig. 7)에서 절점 2에서의 수직 변위 대 인장력 곡선을 Fig. 8에 도시하였다. 앞에서 언급한 모델들과는 다르게 좌굴 후에 평형에 필요한 하중이 감소함을 알 수 있다. 인장력에 의해 트러스 부재들이 완전히 펼쳐졌을 때 다시 접기 위해서는 압축력에 의한 좌굴 거동을 보인다. 스토퍼를 절점 3이 움직이는 축에 설치하면 음의 포아송 효과를 가지는 기계적 스위치로 설계할 수 있다. 한편 이 구조물은 접혔을 때와 완전히 펼쳐졌을 때 필요한 하중이 0이라는 특징을 가지고 있다. 이해를 돕기 위하여 하중-변위 곡선상의 점들에서의 링크 기구 형상을 Fig. 9에 나타내었다.
3.3 수치 예제 결과 및 고찰
제시된 각 링크 기구들에서 사용된 제원은 Table 2에 주어져 있으며, 수치 결과들은 특정 인장력에서 좌굴 거동을 보이는 것을 확인할 수 있다. 다양한 링크 기구들은 거시적으로 인장력에 의해 좌굴이 발생하는 것처럼 보이나, 모든 기구는 국소적인 압축력에 의해 좌굴이 발생한다. 이러한 거동은 에너지 관점에서 국소적으로 인장력에 의한 좌굴은 발생할 수 없음을 암시한다. 3.1절에서도 설명하였듯이 거시적 인장 좌굴이 발생하기 위해서는 인장력이 가해지는 절점은 반드시 늘어나야 한다는 것이다. 만약 해당 절점의 변위가 인장력 방향으로 늘어나지 않고 줄어든다면, 이는 물리적으로 불가능한 현상이다(Simão and da Silva, 2020).
Table 2.
Parameters for three-types of the link mechanism
| Case | Dimensions, initial imperfections and material properties |
|
Simple (Fig. 3) | |
|
Box (Fig. 5) | |
|
Fly (Fig. 7) |
수치 해석적 측면에서는 거시적으로 인장 좌굴을 유발하는 여러 가지 링크 기구들은 스냅-스루와 같은 전형적인 아치형 구조에서 볼 수 있는 후 좌굴 거동을 보인다. 따라서 기구들의 적절한 설계를 위해서는 본 연구에서 제안한 비선형 트러스 유한요소 모델과 함께 안정적인 일반화된 변위 제어법을 적용하는 것이 필수적임을 확인하였다.
4. 결 론
본 연구에서는 비틀림 스프링이 부착된 기하학적으로 정확한 트러스 유한요소 모델을 개발하였으며, 이를 이용하여 다양한 형태의 링크 기구들의 후 좌굴 거동을 해석하였다. 한편 정확한 후 좌굴 거동을 추적하기 위해서는 보다 안정적인 하중-변위 제어법이 필요함을 보였다. 수치 예제를 통해 구조의 인장 좌굴 현상은 국소적으로 발생하는 압축력에 의한 좌굴이며, 이는 에너지 관점에서 타당하다는 참고문헌에서의 결론을 확인하였다. 거시적 관점에서의 인장 좌굴 현상을 활용하는 방안으로 다양한 링크 기구들을 제시하였으며, 비틀림 스프링 상수를 매개변수로 비선형 해석을 수행하였다. 거시적 인장 좌굴은 음의 포아송 구조 설계에 유용하며, 이러한 구조의 설계에 있어 비틀림 스프링 강성계수와 링크 개수가 주요 설계 변수임을 보였다. 후속 연구로써 제시된 링크 기구들을 이용하여 기계적 스위치 구실을 하면서도 음의 포아송 효과를 가질 수 있는 실질적인 구조들을 제작하고 실험을 수행하고자 한다.
