

1. 서 론
2. 모델차수축소법 기반 프리스트레스 주파수응답해석
2.1 프리스트레스 주파수응답해석
2.2 크리로프 부공간 기반 모델차수축소법
3. 합성곱 신경망 훈련용 빅데이터 생성
3.1 유한요소모델링
3.2 볼트 체결에 따른 주파수응답 데이터 세트
3.3 축소모델 기반 프리스트레스 주파수응답 해석
3.4 MS 유사성 함수로 계산한 MS 유사성 지도
4. 초기 볼트풀림 상태 진단 신경망 훈련
4.1 초기 볼트풀림 진단용 신경망 구조 모델링
4.2 볼트풀림 진단 신경망 네트워크 훈련
4.3 합성곱 신경망 평가
5. 결 론
1. 서 론
대부분의 기계 시스템은 두 개 이상의 구조물 혹은 부품의 결합으로 다양한 방식의 체결 방법이 존재한다. 그 중 결합과 분리가 용이하고 많은 개선이 이루어진 볼트(bolt)와 너트(nut)를 이용한 체결 방식은 다양한 분야에서 활용도가 높다. 하지만 볼트의 체결력이 변화하여 풀림(loosening)이 발생할 경우 결합부의 분리(separation) 혹은 미끄러짐(slip)이 발생할 수 있다. 두 개 이상의 구조물의 결합에 사용된 볼트의 체결력(clamping force) 변화는 기계적 결함을 야기하며 경우에 따라 재산과 인명 피해를 동반하는 치명적인 사고로 이어지므로 볼트 체결부에 대한 지속적인 점검과 관리가 요구된다.
볼트의 체결력 변화에는 관리 소홀, 진동, 충격, 열 등의 다양한 원인이 있으며, 볼트풀림을 진단하기 위해 다양한 연구가 진행되고 있다. 반복 하중조건에 있는 볼트의 축력 상실과 그에 따르는 풀림 수명에 관한 실험적인 연구를 통해 볼트풀림에 미치는 주요 인자가 횡 방향 진동 변위 진폭의 크기임을 확인하는 연구가 수행되었다(Yang et al., 2022). 볼트풀림을 방지하기 위하여 제시된 세 가지 후처리 방법이 있으며, 이는 질화티탄(TiN), 폴리테트라 플로오로에틸렌(PTFE) 및 황화몰리브덴(MoS2)을 이용한 코팅을 통해 풀림이 방지되는 정도를 진단한다. 또한 유한요소모델을 생성하여 수치적 해석과 실험 결과를 비교하여 높은 일치도를 확인할 수 있다(Liu et al., 2017).
체결된 볼트의 풀림 감지로 다양한 방법으로 시도되었다. 풍력 터빈 타워(wind turbine tower, WTT) 구조물의 관형 강철 세그먼트를 연결하는 볼트 조인트에 대한 이미지 기반의 모니터링 기술을 제안되었는데, 이는 영상처리 기술을 기반으로 너트를 분할, 너트의 라인 감지를 통해 너트의 각도를 추정하여 최종적으로 볼트의 풀림을 감지하였다(Park et al., 2015). 볼트에 대한 너트의 회전 각도를 계산하여 최소 1°의 풀림 각도를 식별하여 볼트에 대한 너트의 풀림 회전 각도를 감지하는데 심층학습(deep learning)과 머신비전을 결합한 5세대의 YOLO (You Only Look Once) 기반 볼트풀림 감지 방법이 제안되었다(Sun et al., 2022). 유한요소해석은 볼트 체결력의 진단에 효과적으로 활용되었다. Jiang 등(2013)은 유한요소해석으로 주기적인 횡방향 토크 하중이 볼트와 너트의 나사산의 슬립-스틱(slip-stick) 접촉면에서 너트의 자체 회전을 유발하는 원인임을 실험과 높은 유사도의 수치 해석 결과로 보여주었다(Jiang et al., 2013).
근래에는 기계 혹은 구조물의 진단을 위해 인공 신경망 기반의 딥러닝 기법이 각광을 받고 있다. Jeong 등(2022)은 음질 인자가 적용된 정상 및 고장 상태의 기계 진동 신호를 레이져 도플러 진동계로 측정하였고, 이 데이터에서 기계 상태에 대한 음질 인자의 특성을 추출하는 합성곱 신경망을 훈련하여 기계 상태 진단법을 제안하였다. LSTM(long short-term memory) 알고리즘을 기반으로 구조파 신호를 사용하여 볼트 축력을 자가 판정하는 시스템도 제시되었다(Seong et al., 2020). 이들은 체결력 변화를 통한 가진된 구조파의 응답 크기와 도달시간을 관측하여 필터링한 다음 LSTM 알고리즘을 통해 볼트 체결과정에서 실시간 축력 관찰이 가능함을 확인하였다. Kim과 Han (2022)은 볼트로 체결된 단순 구조물에서 발생하는 주파수응답함수 데이터의 합성곱 신경망 훈련을 통해 볼트 체결력 감지와 예측에 대한 가능성을 제시하였다.
본 논문에서는 8개의 볼트 체결로 지지되는 외팔보(cantilever beam) 구조체의 볼트 체결력의 변화에 상응하는 주파수응답의 유사성 데이터를 딥러닝에 적용하여 초기 볼트풀림 영역에 대하여 볼트 체결력 진단 기법을 훈련하고, 평가지표를 통해 예측의 정확도를 평가하고자 한다. 먼저 볼트 체결력의 변화를 반영할 수 있는 유한요소모델을 생성한다. 이러한 초기 유한요소모델을 사용한 주파수응답 해석에는 큰 해석 시간이 요구되므로 Krylov 부공간법 기반의 모델차수축소법(Han, 2010; 2012; Won and Han, 2014)을 적용한 축소모델을 생성한다. 이후, 볼트 체결력의 변화에 따른 비선형성이 고려된 시스템 접선강성행렬을 사용하여 복수의 출력점에서 생성한 주파수응답함수의 크기(magnitude)와 위상(phase)에 대한 변화를 초기 정상상태와 비교하여 정량화하고 이를 이미지 형태의 히트맵(heatmap)으로 생성하여 합성곱 신경망(convolutional neural network, CNN)의 입력 데이터로 사용하였다. 훈련(training), 검증(validation), 평가(test) 데이터는 초기 볼트풀림 영역에 해당되는 볼트 체결력 범위에 대해서 메르센 트위스터(Mersenne Twister) 기법을 활용하여 랜덤하게 생성하였다. 합성곱 신경망의 학습은 MATLAB(The MathWorks, Inc., 2023) 환경에서 수행되며, 학습이 완료된 합성곱 신경망은 평가 데이터를 사용하여 출력되는 평가 지표를 바탕으로 볼트 체결력 예측에 대한 정확도를 확인할 수 있었다.
2. 모델차수축소법 기반 프리스트레스 주파수응답해석
2.1 프리스트레스 주파수응답해석
주파수응답해석(harmonic response analysis)을 위한 구조 시스템의 운동방정식은 다음과 같다(Han, 2010; 2012; Kang et al., 2021).
여기서 [M], [C], [K]는 각각 질량행렬, 감쇠행렬, 강성행렬, 는 각각 가속도 벡터, 속도 벡터, 변위 벡터이고, 는 하중 벡터이다. 모든 행렬은 N개의 자유도를 가지고 있는 초기모델(full order model, FOM)의 시스템 행렬이다. 감쇠는 식 (2)와 같이 레일리 감쇠(Rayleigh damping)로 가정한다.
가진 각주파수 Ω인 하중 벡터에 대한 변위 벡터는 다음과 같다.
이때 는 하중 벡터의 크기이며 과 는 각각 하중 벡터의 실수부와 허수부이다. 그리고 𝜓는 하중 위상차(force phase shift)이다. 이러한 하중 벡터에 대한 변위 벡터는 다음과 같은 형태이다.
여기서 는 최대 변위, 과 는 각각 변위 벡터의 실수부와 허수부이다. 그리고 𝜙는 변위 위상차(displacement phase shift)이다. 식 (3) 및 (4)를 식 (1)에 대입하여 정리하면 다음과 같은 조화운동 방정식을 얻을 수 있다(Han, 2010; 2012).
식 (5)로부터 계산된 복소수 형태의 변위 벡터에서 각 자유도에 대한 진폭(amplitude) 및 위상(phase)은 식 (6) 및 (7)과 같이 구한다.
볼트 체결 구조체의 볼트 체결력 크기에 따라 구조물의 동특성이 달라진다. 따라서, 본 논문에서 고려하는 주파수응답 데이터의 경우에는 볼트 체결력에 따라 변경된 시스템의 접선강성행렬을 이용하여 해석되는 프리스트레스 주파수응답해석(prestressed harmonic analysis) 데이터를 사용한다. 볼트 체결력에 따른 변경된 시스템의 접선강성행렬을 반영한 프리스트레스 주파수응답함수의 관계식은 식 (8)과 같이 정의된다(ANSYS, 2022).
여기서 는 볼트 체결력이 반영된 상태에서 계산한 시스템의 접선강성행렬이다. 추가적인 프리스트레스 해석과 관련된 상세한 내용은 참고문헌(Kim and Han, 2022)에 기술되어 있다.
2.2 크리로프 부공간 기반 모델차수축소법
일반적인 유한요소해석을 통해 구해지는 주파수응답함수는 큰 자유도의 초기모델을 사용하여 긴 해석시간이 요구되므로 수 만번의 주파수응답해석이 필요한 본 연구에는 적합하지 못하다. 따라서 주파수응답 데이터 생성에 대한 계산 효율을 높이기 위해 주파수응답해석에 크리로프 부공간(Krylov subspace) 기반 모델차수축소법(model order reduction, MOR)을 이용하였다(Han, 2010; 2012).
여기서 변환행렬 는 크리로프 부공간을 생성(span)하는 기저벡터를 열벡터로 가지며 아놀디 과정(Arnoldi process)으로 정규직교화된 행렬이다. {z}는 n개의 자유도로 축소된 차원에서의 응답이다. 최종적으로 식 (9)의 관계를 식 (1)에 대입하고, 변환행렬의 전치행렬을 식 (1)의 양변에 곱하여 식 (10)과 같은 축소 시스템을 얻는다.
이에 대응하는 조화운동 방정식은 식 (11)과 같다.
축소모델(reduced order model, ROM)은 초기모델과 비교하여 작은 자유도를 가지더라도 초기모델 수준의 높은 정확도를 가진다. 따라서 볼트 체결 구조체의 반복적인 주파수응답해석에서 높은 계산 효율성을 얻을 수 있으므로 합성곱 신경망 훈련에 사용될 주파수응답 빅데이터 구축에 큰 도움이 된다.
3. 합성곱 신경망 훈련용 빅데이터 생성
3.1 유한요소모델링
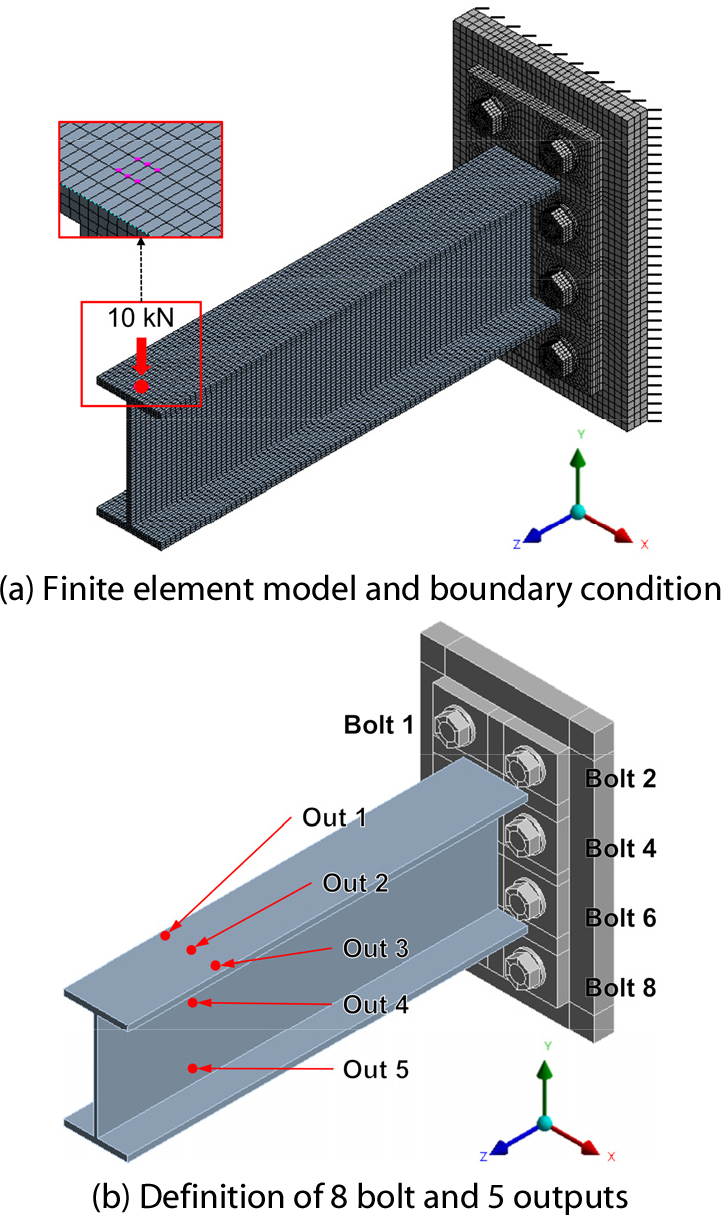
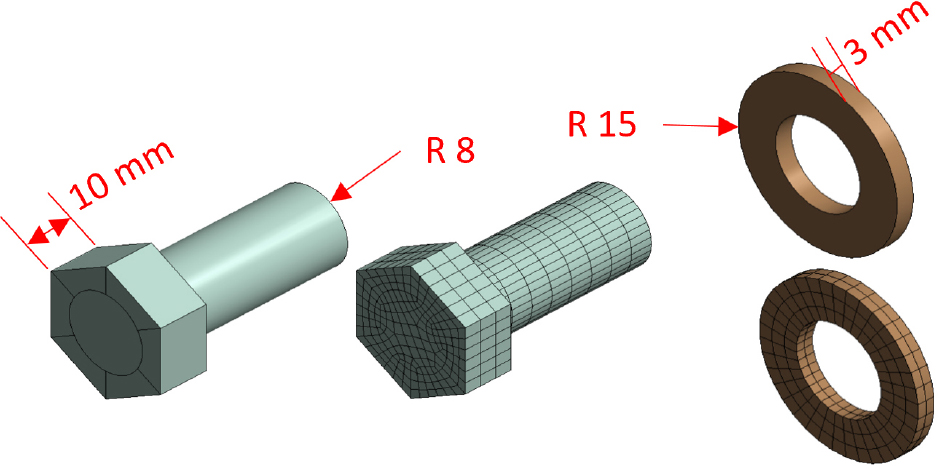
적용 예제(Oman and Nagode, 2017)로 고려된 볼트 체결 구조체는 폭 64mm, 높이 120 mm, 길이 400mm의 크기를 가지는 외팔보가 8개의 볼트로 지지되는 형상이다(Fig. 1 및 2 참조). 유한요소모델에 사용한 물성 정보는 Table 1과 같다. 유한요소모델은 75,597개의 절점을 가지고 있으며, 총 자유도는 212,712개이다. Fig. 1(a)와 같이 가진력으로 6개의 절점에 총 10kN의 절점력을 부여하였으며, Fig. 1(b)와 같이 5개 관측점에서의 응답을 고려하였다. 레일리 감쇠는 관심 주파수 영역인 = 1 Hz와 = 3,000Hz에서 감쇠비 = 0.02를 갖는다고 가정하여 식 (12)에서 감쇠 계수 𝛼 = 0.1256와 강성 감쇠 계수 𝛽 = 6.3649 × 10-7를 계산하였다.
Table 1
Material property for the bolt structures
3.2 볼트 체결에 따른 주파수응답 데이터 세트
완전 체결된 볼트의 체결력은 30kN이며, 초기 볼트풀림 상태는 볼트 체결력이 20~30kN인 구간으로 설정하였다. 8개의 볼트에 각각 이 구간에 해당하는 볼트 체결력을 무작위로 부여하여 주파수응답 데이터 세트를 생성하였다. 구체적으로 볼트 체결력 데이터 세트는 초기 볼트풀림 구간에서 5kN 단위의 3 수준 체결력을 8개의 볼트에 무작위로 부여한 6,561개의 데이터와 2kN 단위의 6 수준, 1kN 단위의 11 수준 체결력들을 각각 무작위으로 부여한 20,000개와 45,000개의 데이터, 그리고 1N 단위의 체결력이 무작위로 부여된 10,000개의 데이터로 구성된다. 2kN과 1kN 데이터들은 생성 가능한 모든 경우의 볼트 체결력 조합을 메르센 트위스터(Mersene Twister) 기법(The Math Works, Inc., 2023)을 통해 무작위 순서로 재정렬하여 생성하였고, 1N 단위의 경우는 완전 무작위의 체결력이 부여된 데이터를 생성하였다. 1N 단위의 데이터들 중 5,000개의 데이터는 검증, 나머지 5,000개의 데이터는 평가 데이터로 사용하였다. 이와 같이 생성된 주파수응답 데이터는 총 81,651개이다(Table 2 참조).
Table 2
Data set for CNN
| Case | No. of data | ||
| Data configuration | Training | 1 kN-level | 45,000 |
| 5 kN-level | 6,561 | ||
| 2 kN-level | 20,000 | ||
| Total | 71,561 | ||
| Validation | 5,000 | ||
| Test | 5,000 | ||
볼트 체결력 구성에 따라 변화된 체결력을 반영한 데이터 생성이 자동으로 이루어지도록 MATLAB 환경에서 ANSYS MAPDL을 구동하였으며, MATLAB에서 생성된 체결력 정보들을 APDL 환경에서 변수로 받아들여 프리스트레스 주파수응답 데이터로 생성하였다.
3.3 축소모델 기반 프리스트레스 주파수응답 해석
주파수응답 해석을 위해 6개의 절점에 총 10kN의 가진력을 Y방향으로 부여하고, 5개의 출력점에 대하여 주파수응답함수를 확인한다. 수행되는 주파수응답 해석에는 볼트 체결력에 따른 구조적 특성이 반영되어야 하는데, 이를 위하여 프리스트레스 주파수응답 해석을 사용하였다. 주파수응답 해석 자체는 선형해석이지만, 사용하는 시스템 행렬은 이전 비선형 정적해석에서 볼트 체결력에 따른 비선형성을 고려한 접선강성행렬(tangent stiffness matrix)이다.
초기모델(FOM)은 총 212,712개의 자유도를 가지며 주파수응답에 약 6시간이 소요되므로 합리적인 시간 내에 수만 개의 주파수응답 데이터 생성이 불가능하였다. 따라서 앞서 설명한 크리로프 부공간 모델차수축소법을 적용하였다. ANSYS MAPDL에서 생성된 초기모델의 시스템 행렬을 이용하여 축소모델(ROM) 생성 및 주파수응답을 계산하며, 그 과정에 사용되는 프로그램에 따른 총 계산 시간과 오차를 각 방식에 따라서 비교하였다.
ROM-A의 경우, 변환행렬 및 축소모델의 생성과 주파수응답 계산을 ANSYS MAPDL 환경에서 모두 수행한다. ROM-B는 ANSYS MAPDL 환경에서 출력한 초기모델의 시스템 행렬을 MATLAB 환경에서 읽고 변환행렬 및 ROM 생성과 주파수응답을 수행한다. 세 번째 ROM-C의 경우는 ANSYS MAPDL 환경에서 변환행렬 및 축소모델을 생성하여 MMF(Matrix Market Format) 형태의 행렬 파일로 출력한다. 이를 MATLAB 환경에서 읽고 주파수응답을 수행하는 방식이다. 즉, ROM-A와 ROM-C는 변환행렬 생성이 ANSYS MAPDL 환경에서 수행되고, ROM-B의 경우는 MATLAB 환경에서 변환행렬이 구해진다. 설명한 세 가지 방법의 주파수응답 해석에 소요되는 총 시간을 Table 3에 비교하였다.
Table 3
Comparison of ROMs by computational environments
| Case |
FOM generation |
ROM generation |
FRF calculation |
Time (s) |
| ROM-A |
ANSYS MAPDL |
ANSYS MAPDL |
ANSYS MAPDL | 215 |
| ROM-B |
ANSYS MAPDL | MATLAB | MATLAB | 577 |
| ROM-C |
ANSYS MAPDL | ANSYS MAPDL | MATLAB | 275 |
각 방식으로 생성된 주파수응답 데이터의 정확도를 비교하기 위하여 식 (13) 및 (14)와 같이 초기모델과 축소모델의 오차지표 e(n)(error convergence indicator) 및 상대오차 E(n)(relative error)를 확인하였다(Han, 2010; 2012).
이때 오차지표는 지정한 관심 주파수에서 n차 축소모델의 주파수응답()과 n+1차 축소모델의 주파수응답()사이의 주파수응답 차이를 나타낸다. 본 연구에서는 1~3,000Hz가 관심 주파수 영역이므로 오차지표를 확인할 최고 관심 주파수를 fint = 3,000Hz로 지정하였다. 출력점 2에서의 각 방식에 따른 축소모델의 오차지표는 Fig. 3과 같다.
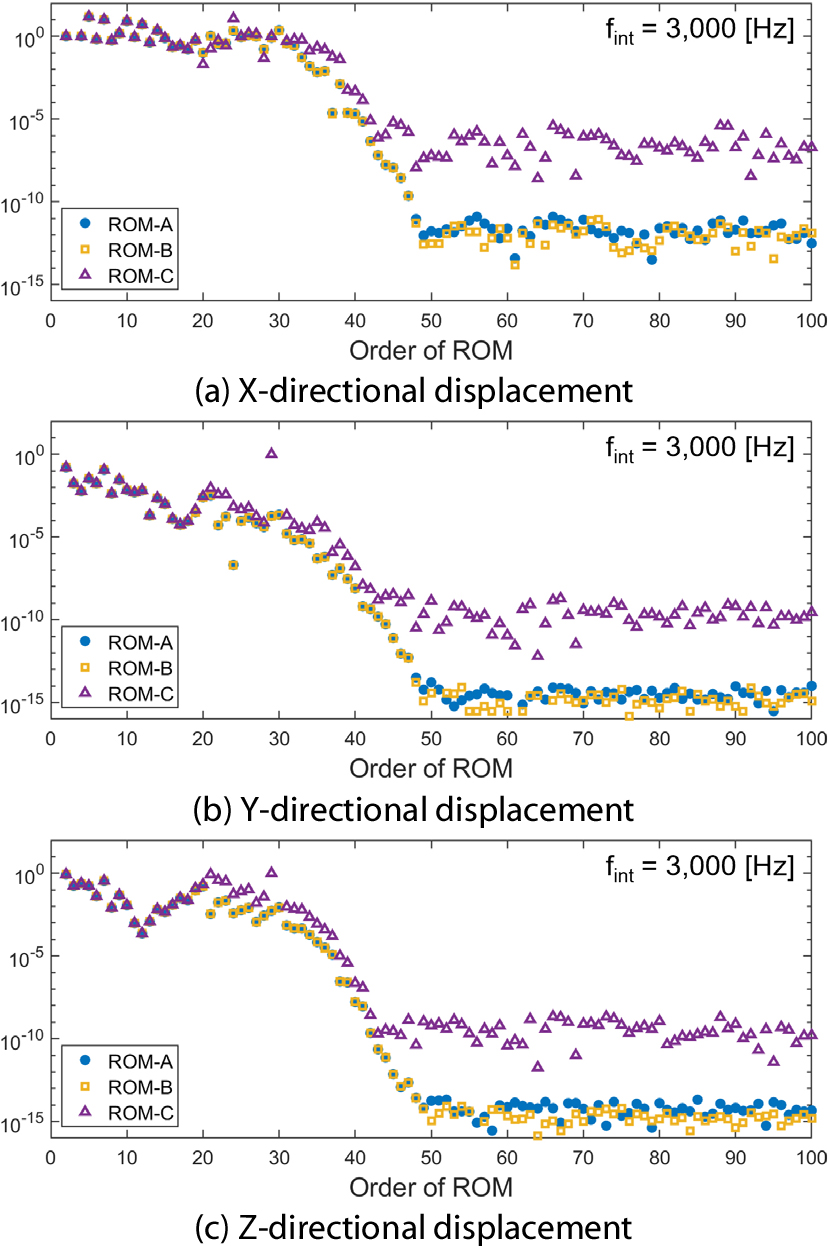
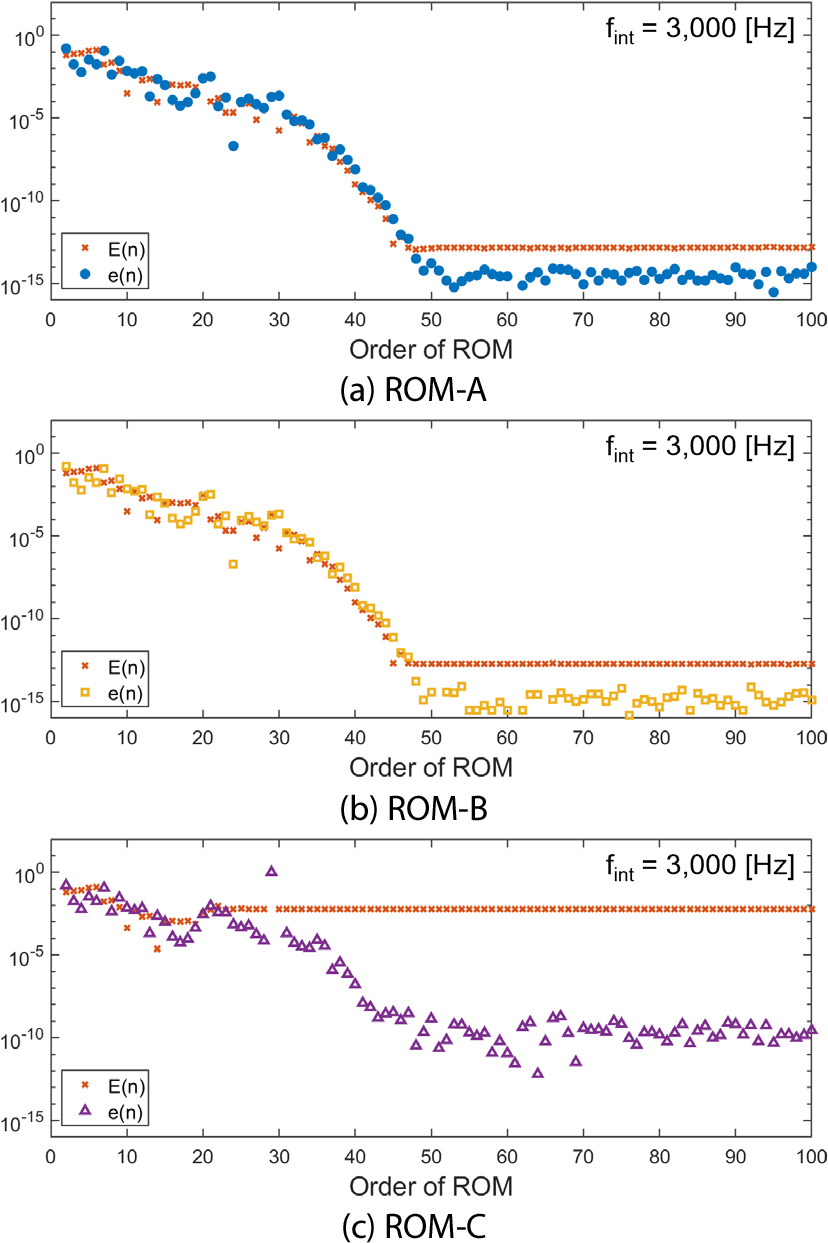
Fig. 4에는 동일한 관심 주파수에서 관측한 출력점 2의 Y 방향 변위에 대한 오차지표와 n차 축소모델의 주파수응답()과 초기모델의 주파수응답()과의 상대오차를 서로 비교하였다. ROM-A와 ROM-B의 경우, 오차지표와 상대오차는 매우 유사한 경향을 가지며, 모두 10-13 이하 수준의 오차로 수렴하였다. ROM-C의 경우, 축소모델의 차수가 증가함에 따라 오차지표는 약 10-10 수준으로 수렴하지만 다른 두 ROM 방식보다 상대적으로 더 큰 오차지표 수준을 보였다. 이 경우에는 상대오차도 다른 두 경우에 비해 비교적 큰 값을 가졌는데, 이는 ANSYS MAPDL에서 계산하여 MMF 형태로 출력한 축소모델의 시스템 행렬이 다른 방식과 달리 비교적 작은 9개의 유효숫자로만 기록되어 충분히 정확한 정보 전달이 이루어지지 않은 이유로 판단된다.
계산 시간 측면에서 ROM-B는 ROM-A에 비하여 비교적 큰 용량의 초기모델을 디스크에 기록하고 불러오는 과정에서 더 많은 시간이 소요된다. 따라서, 오차 수준은 유사하지만 두 가지 방식에 따라 소요 시간이 3배 가량 차이가 발생하는 점을 고려하였을 때, 축소모델과 주파수응답 해석을 같은 계산 환경인 ANSYS MAPDL에서 수행하는 것이 바람직하다고 판단되었다. 따라서, 이후 ROM-A 방식으로 모든 데이터 생성하였다.
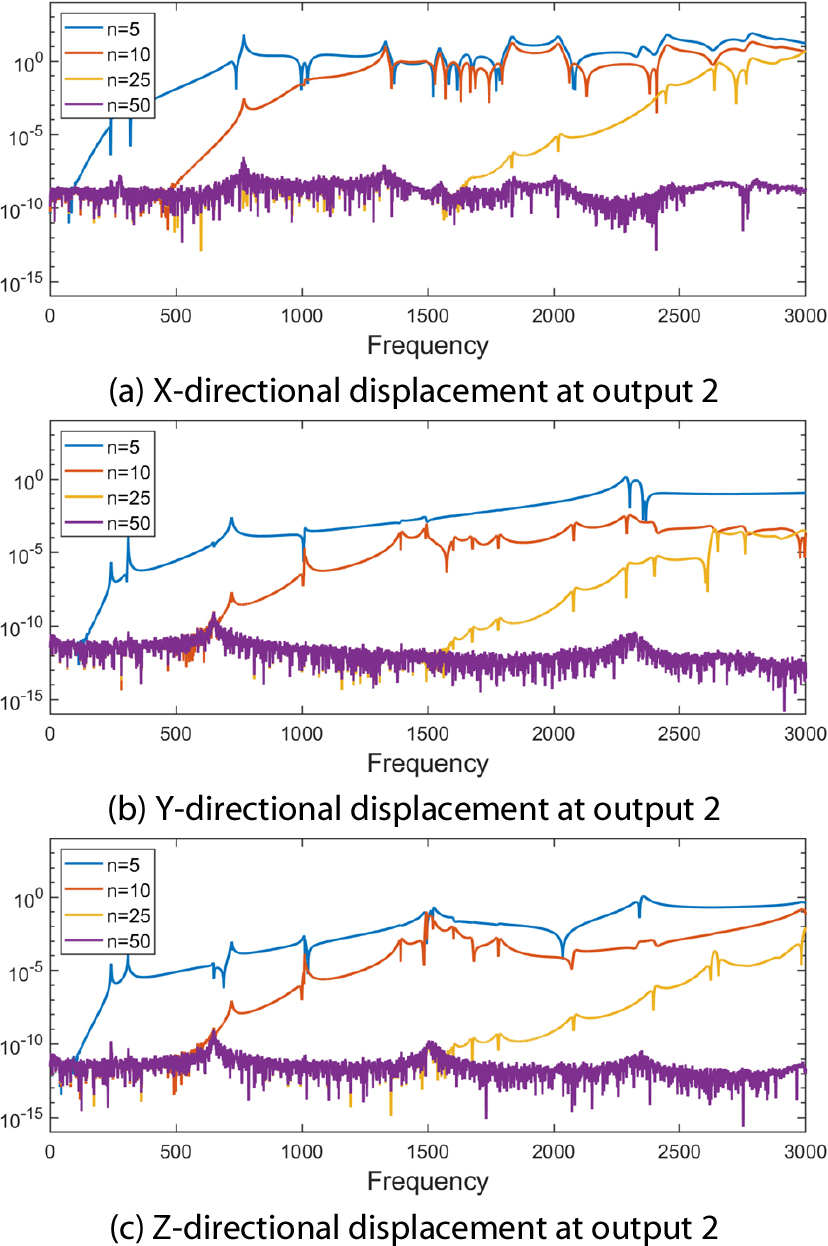
Fig. 5에는 ROM-A 방식으로 생성한 출력점 2에서의 축소차수 n = 5, 10, 25 및 50인 축소모델의 주파수응답을 초기모델과 비교하여 상대오차를 도시하였다. 이러한 상대오차와 앞선 오차지표의 결과로부터 자유도가 50개 이상인 축소모델에서 약 10-10 이하 수준으로 오차가 수렴하는 것을 확인하였고, 최종적으로 축소차수 n=50인 축소모델을 이용하여 주파수응답 빅데이터를 구축하였다.
3.4 MS 유사성 함수로 계산한 MS 유사성 지도
볼트 체결력의 변화가 주파수응답에 미치는 영향을 효과적으로 나타내기 위해서 두 주파수응답 함수의 유사성을 측정하는 가상 주파수응답함수 기반의 신호처리 기법인 MS 유사성 함수(Shin, 2016)를 사용하였다.
여기서 가상 주파수응답 함수 H(f)는 식 (15)으로 정의된다. X(f)는 8개의 볼트가 정상적으로 체결된 시스템의 주파수응답 함수이며, Y(f)는 볼트의 체결력이 변화된 시스템의 주파수응답 함수이다. 식 (16)과 (17)의 과 는 각각 두 주파수응답의 크기 유사성(magnitude similarity) 함수 및 모양 유사성(shape similarity) 함수이다. 매개변수 와 는 각 유사성 함수의 크기를 조절할 수 있는 값이며, 와 값이 작아지면 주파수응답의 차이를 더욱 명확하게 나타낼 수 있다. 각 함수들은 정상상태와의 유사도를 0~1 사이의 정량화된 값으로 도출한다. 모양 유사성 함수 의 경우에 가상 주파수함수의 위상인 argH(f)를 사용하며, 𝜏(f)와 같은 군 지연(group delay)을 이용하여 복소수 데이터의 실질적인 모양을 해석하여 위상 변화를 나타낸다. 군 지연은 다음 식 (18)로 계산된다.
먼저 정상상태와 풀림상태의 주파수응답의 비교를 위해 정상상태와 체결력이 변화된 3가지 경우에 대한 출력점 1의 Y 방향 주파수응답과 크기 유사성 함수 및 크기 유사성 지도 각각을 Fig. 6에 나타내었다. 3가지 경우에 대한 볼트 체결력은 Table 4에 제시되어 있다.
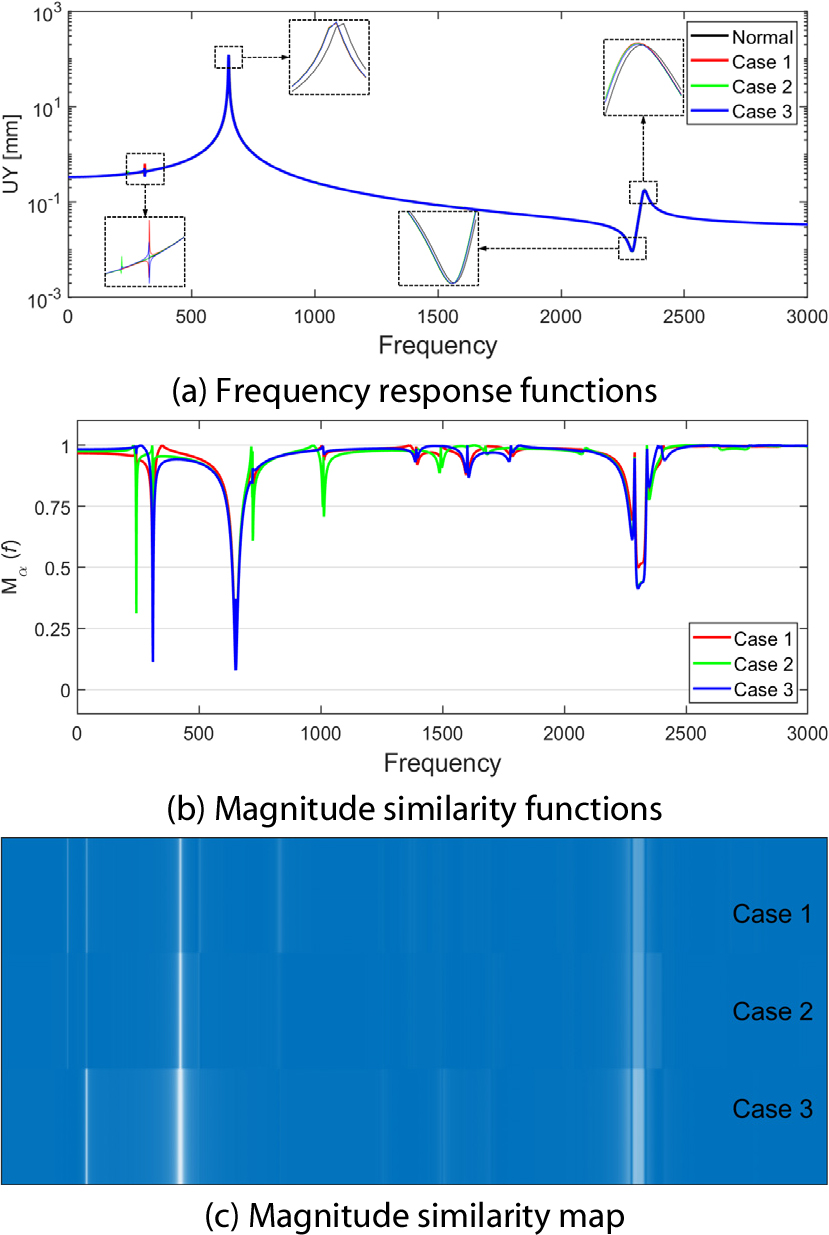
Table 4
Arbitray three cases for bolt pretension for the comparison with the normal case
이 경우에 주파수응답은 약 300Hz 부근에서 차이를 보였으며, 체결력이 변화된 시스템의 피크점이 왼쪽으로 이동하여 강성이 낮아졌음을 확인할 수 있었다(Fig. 6(a) 참조). 이러한 주파수응답의 변화는 육안으로 정량화하기에 어려움이 있으므로 크기의 유사도를 정량화한 Fig. 6(b)와 같은 크기 유사성 함수로 확인할 수 있다. 여기서 MS 유사성 함수의 크기 유사성 매개변수 은 0.589로 하였다. Fig. 6(c)는 크기 유사성 함수 데이터를 사용하여 MATLAB의 heatmap 기능으로 생성한 크기 유사성 지도(Magnitude similarity map)이다. 크기 유사성 지도는 주파수응답의 크기 차이를 0~1의 정량화된 유사도 값을 가지는 이미지 형태로 시각화한 것이다.
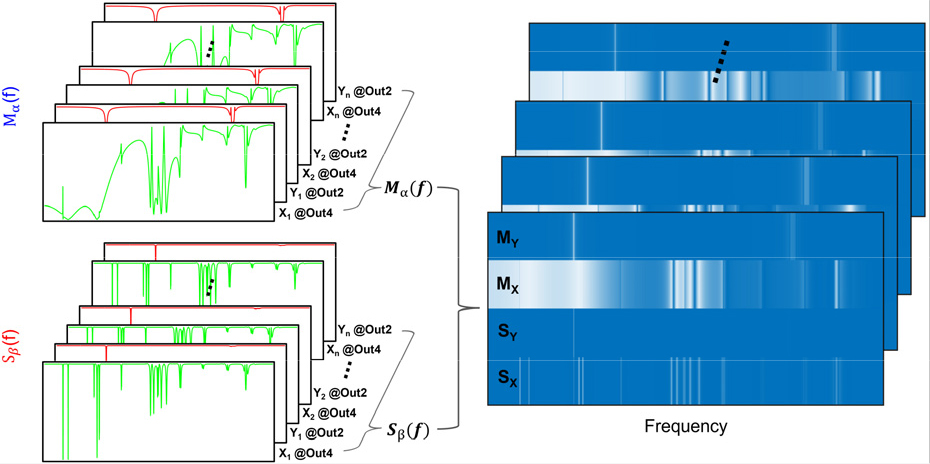
생성된 주파수응답 함수 데이터들은 MS 유사성 함수로 변환되며 최종적으로 MS 유사성 지도 형태로 생성된다(Fig. 7 참조). 생성된 MS 유사성 빅데이터는 합성곱 신경망 훈련에서 이미지 형태의 입력 데이터로 사용된다. 입력 데이터로 사용되는 주파수응답은 출력점 2의 Y 방향 데이터와 출력점 4의 X 방향 데이터를 이용하였다. MS 유사성 함수를 적용할 때, 사용되는 유사성 매개변수 와 은 관측하는 방향에 따라서 주파수응답의 크기가 다르므로 각 방향별로 다른 값을 적용하였다. MS 유사성 함수 계산시, Y 방향 응답의 와 는 각각 0.589, 0.0175이며, X 방향 응답에는 7.441과 0.0361의 값을 각각 사용하였다.
4. 초기 볼트풀림 상태 진단 신경망 훈련
4.1 초기 볼트풀림 진단용 신경망 구조 모델링
앞에서 정의한 입력 빅데이터들을 사용하여 볼트 체결력을 예측하는 회귀(regression) 합성곱 신경망(CNN) 구조를 모델링 한다. 신경망 구조의 모델링과 훈련에는 MathWork사의 MATLAB Deep Learning Toolbox(The MathWorks, Inc., 2023)를 사용하였다(Fig. 8 참조).
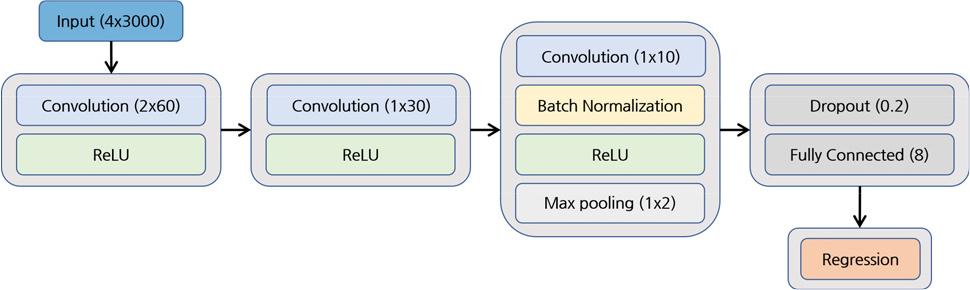
먼저 4 × 3,000 크기의 회색조 히트맵 이미지를 입력층(input layer)을 통해 읽어 들인다. 입력되는 MS 유사성 지도 데이터는 출력점 2의 Y 방향 주파수응답과 출력점 4의 X 방향 주파수응답에 대한 크기와 위상값이다. 총 3개의 합성곱 계층(convolution layer)이 사용되며 합성곱 계층의 사용에는 ReLU 활성화 함수(activation)가 동반된다. 또한, 마지막 합성곱 계층이 적용된 다음 정규화 계층(batch normalization)과 맥스풀링 계층(max pooling layer)이 사용된다. 드롭아웃 계층(drop-out)과 완전연결계층(fully connected layer)을 거쳐 출력 계층을 통해 8개의 볼트에 대한 각각의 체결력을 예측하는 회귀 출력 모델을 사용하여 훈련을 수행하였다.
첫 번째 합성곱 계층은 높이와 너비가 2 × 60의 크기를 가진 필터(filter)를 16개 사용하고 보폭(stride)은 1 × 1, 채우기(padding)는 명령어 ‘same’을 사용하여 입력 이미지의 크기와 같은 이미지가 출력되게 하였다. 이후 보폭과 채우기는 모든 합성곱 계층에서 동일하게 설정하였다. 두 번째 합성곱 계층의 필터는 각각의 행들에 있는 데이터들을 구분되도록 하기 위해 1 × 30의 크기를 가진 32개의 필터를 사용하였다. 마지막 합성곱 계층은 1 × 10의 크기의 필터를 64개 사용하였고 정규화 계층과 맥스풀링 계층을 추가로 사용되었다. 맥스풀링 계층의 크기는 1 × 2이며, 보폭과 채우기는 앞선 합성곱 계층과 같다. 마지막으로 신경망의 과적합(overfitting)을 방지하기 위해 20%의 무작위 입력 요소를 0으로 변환하는 드롭아웃 계층을 추가하였으며, 3개의 완전연결 계층을 사용하여 이전 계층이 이미지로부터 학습한 국소부의 특징을 조합하고, 큰 패턴을 식별하도록 하여 각 볼트의 체결력을 예측하였다. 합성곱 신경망의 출력 모델은 손실함수(loss function)를 사용하는 회귀 출력 계층(regression layer)을 사용하였다(Fig. 8 참고).
4.2 볼트풀림 진단 신경망 네트워크 훈련
3.2절에서 설명한 총 81,561개의 주파수응답 데이터를 3.4절에서 설명한 MS 유사성 지도(MS similarity map)의 형태로 생성하였다. 최대 71,561개의 데이터가 훈련에 사용되었으며 5,000개의 데이터가 검증에 사용되었다. 나머지 5,000개의 데이터는 훈련이 끝난 후, 신경망 평가에 사용되었다.
MATLAB에서 CNN 훈련 시, 솔버(solver)로는 Adam (adaptive moment estimation)를 사용하였다. 학습률(learning rate)과 최대 에폭(max epoch)은 경험적으로 확인한 10-5와 500의 값을 각각 사용하였다. 1에폭당 반복 수행되는 미니배치 크기(mini- batch size)는 60으로 총 205번의 반복이 하나의 에폭에서 수행된다. 검증 주기(validation frequency)는 3번의 에폭마다 검증 메트릭을 평가할 수 있도록 615번의 반복 횟수로 설정하였다. 위와 같은 하이퍼파라미터 세팅으로 합성곱 신경망을 훈련하였고, 신경망의 성능과 몇 가지 임의의 진동 상태에 대한 볼트 체결력의 예측을 확인하였다.
4.3 합성곱 신경망 평가
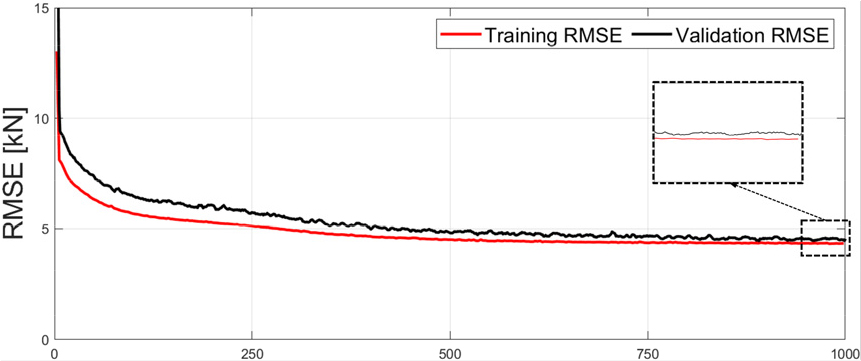
합성곱 신경망 훈련에는 훈련 데이터량에 따라서 세 번의 훈련을 수행하였다. Network 1은 17,561개의 훈련 데이터를 사용하고, Network 2, Network 3은 각각 56,561개와 71,561개의 훈련 데이터를 사용하여 신경망을 훈련하였다. 이 중에서 Network 3에 대한 CNN 훈련 과정의 평균제곱근오차(RMSE) 변화는 Fig. 9와 같다.
이후에 5,000개의 평가 데이터를 사용하여 다음 3가지 오차를 비교하여 각 신경망의 성능을 평가하였다.
식 (19), (20), (21)은 각각 평균절대오차(mean absolute error, MAE), 평균제곱근오차(root mean square error, RMSE) 및 결정계수(coefficient of determination, R2)를 의미한다.
이때 는 실제값(true value), 는 예측값(predicted value)이며 는 실제값의 평균값, 그리고 n은 평가 데이터의 갯수이다.
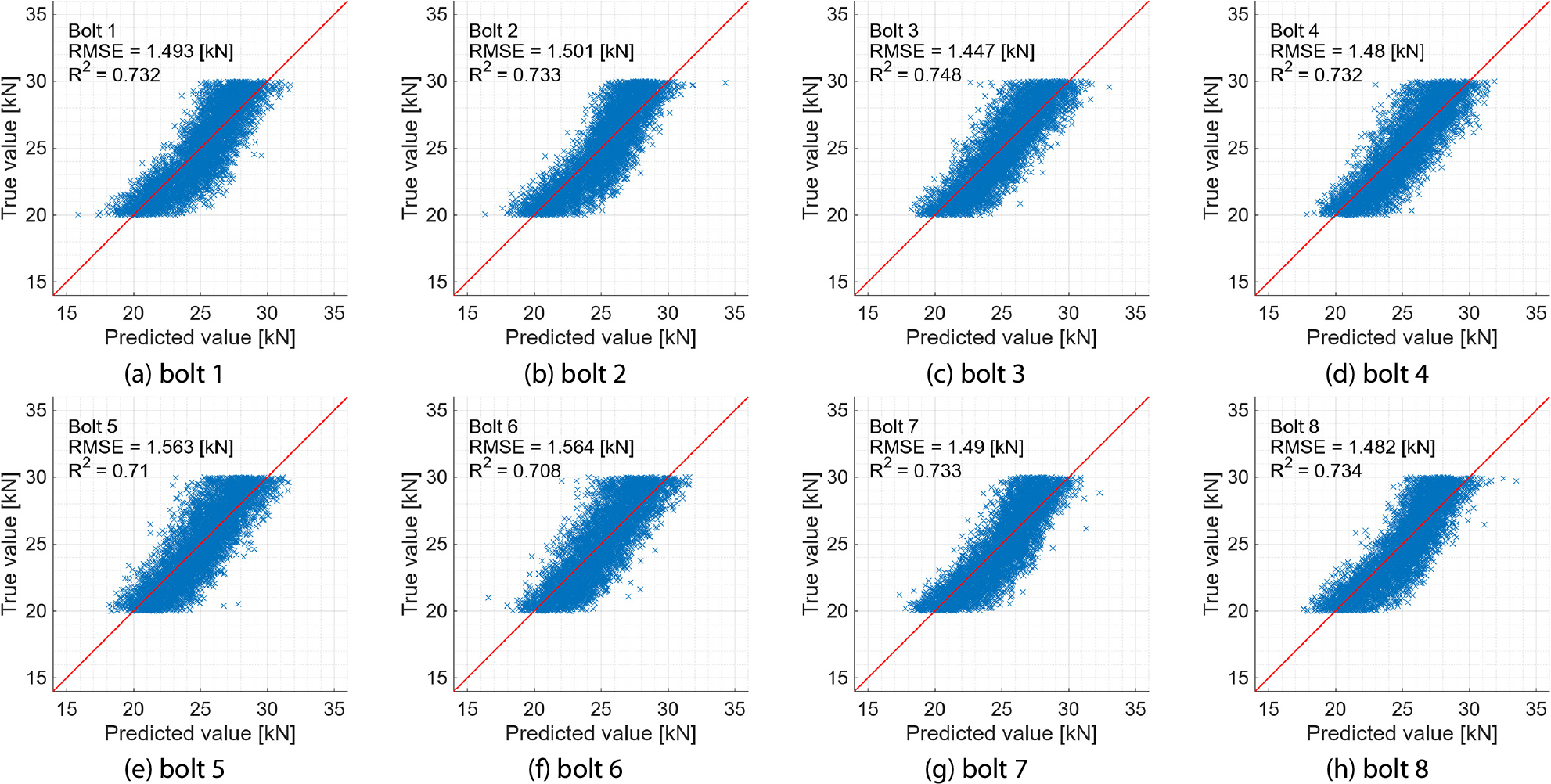
훈련 데이터량이 증가함에 따라서 훈련된 네트워크의 정확도가 개선됨을 확인할 있다(Table 5 참조). Fig. 10과 Fig. 11는 Network 1와 Network 3의 각 볼트에 대한 AE(absolute error)와 MAE를 나타낸다. Network 3에서 8개의 볼트에 대한 MAE의 최소값은 1.147kN, 최대값은 1.238kN 정도이다. RMSE은 최소 1.447kN, 최대 1.564kN의 값을 나타내었다. R2의 경우, 최소 0.708에서 최대 0.748이었다. 반면에 Network 1의 MAE는 최소값 1.354kN, 최대값 1.447kN 수준이다. 또한, R2는 최소 0.611에서 최대 0.650이었다.
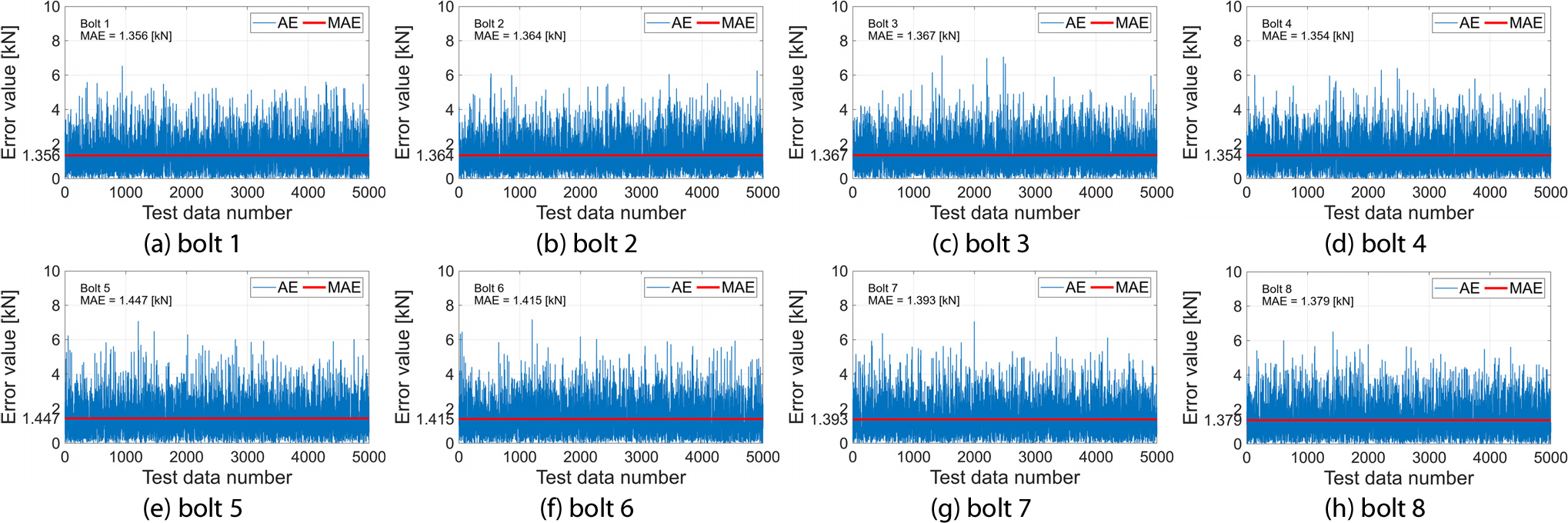
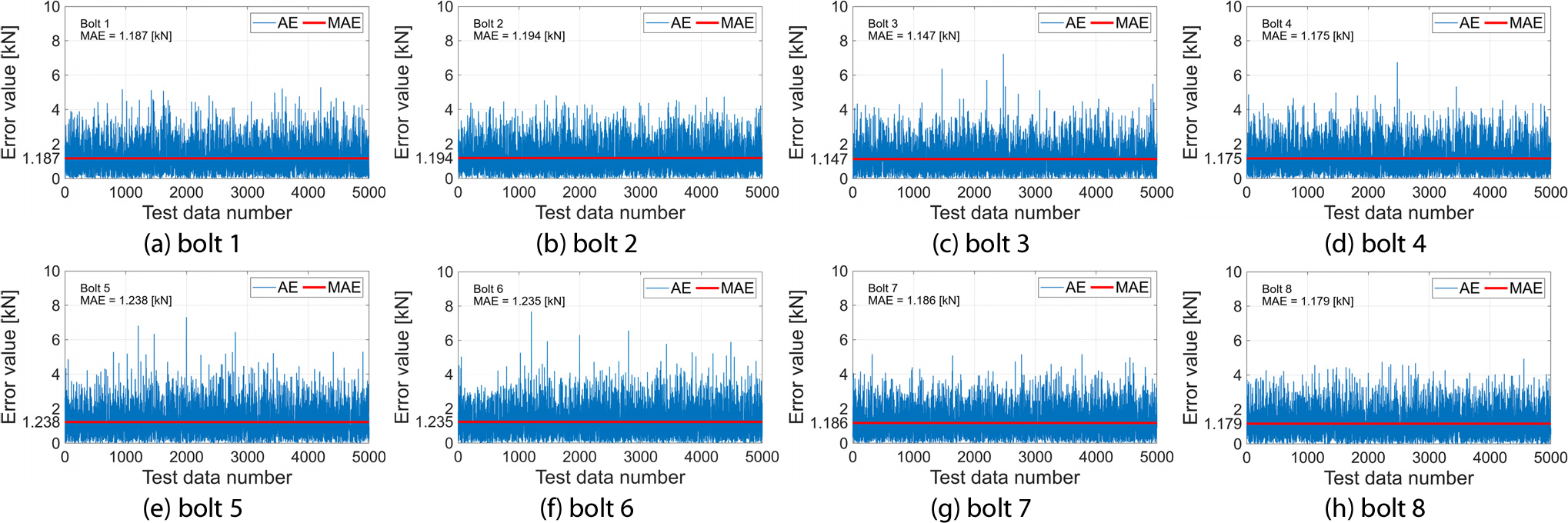
Table 5
Test performance of trained networks according to the number of training data
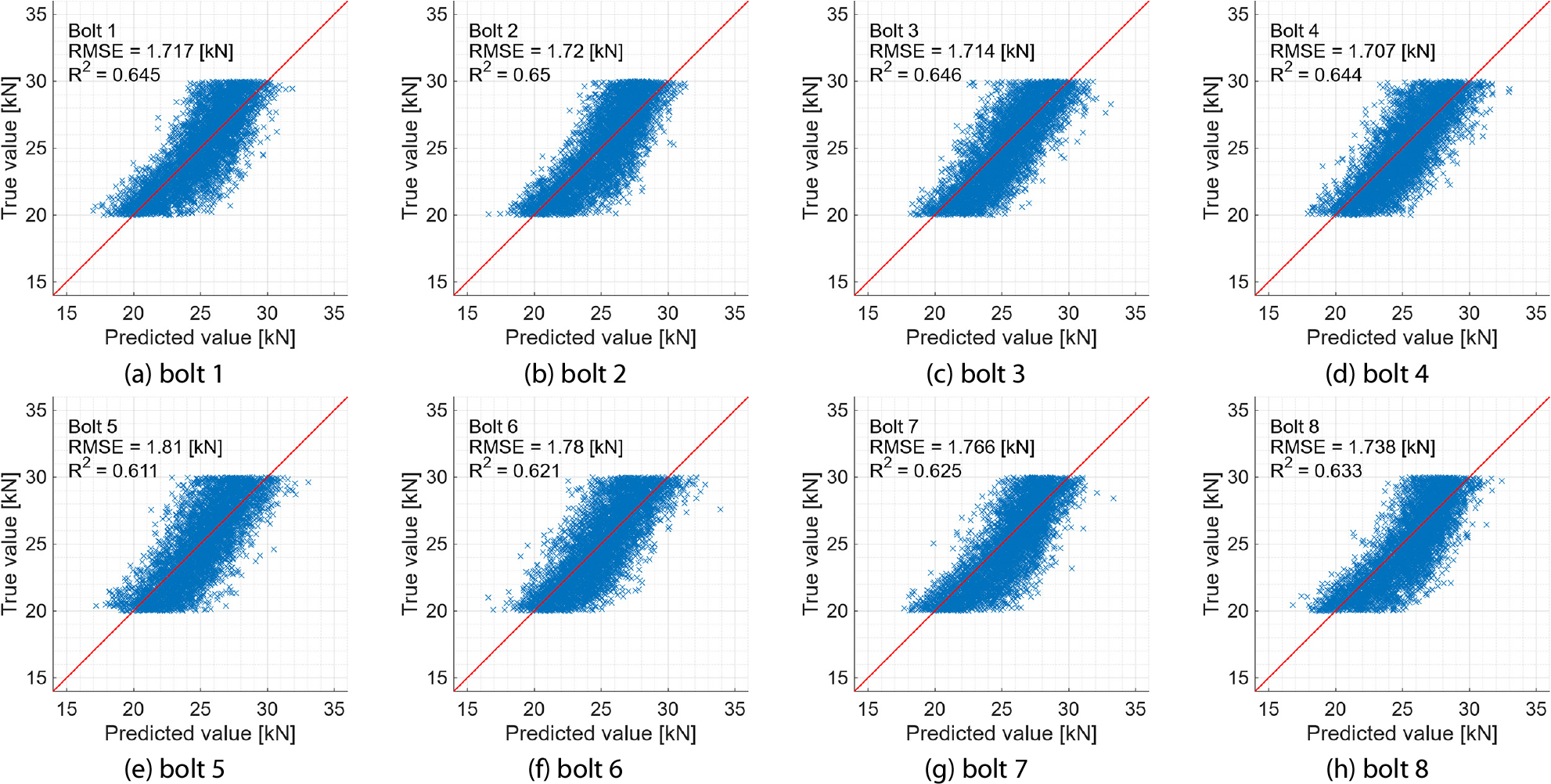
Fig. 12와 13은 Network 1과 Network 3의 평가에서의 각 볼트에 대한 체결력 입력값과 CNN을 통해 출력되는 예측값을 도시한 산점도(scatter plot)이다. Network 3의 산점도가 Network 1보다 좁아져서 정확도가 개선됨을 확인할 수 있다. 그래프들과 각각의 평가 지표를 통해 볼트들에 대한 체결력 예측이 Network 1 대비 Network 3이 최소 11%, 최대 16% 가량 예측 정확도가 개선되었다는 것을 확인할 수 있다. 각 신경망에 따른 MAE, RMSE 및 R2의 값은 Table 5와 같다.
이후에 훈련된 Network 3을 사용해 임의의 3가지 경우에 대한 초기 볼트풀림 상태 내에서의 체결력 예측을 수행하였다. 각 볼트의 체결력 예측에서 최소 0.1kN에서 최대 약 2.3kN의 오차가 발생함을 확인하였다(Fig. 14 참조). 각 경우별로 3.69%, 2.67%, 3.91%의 평균상대오차를 보였다. 예측에 사용된 볼트 체결력 데이터 세트 및 예측값과 상대오차는 Table 6에 자세히 제시하였다.
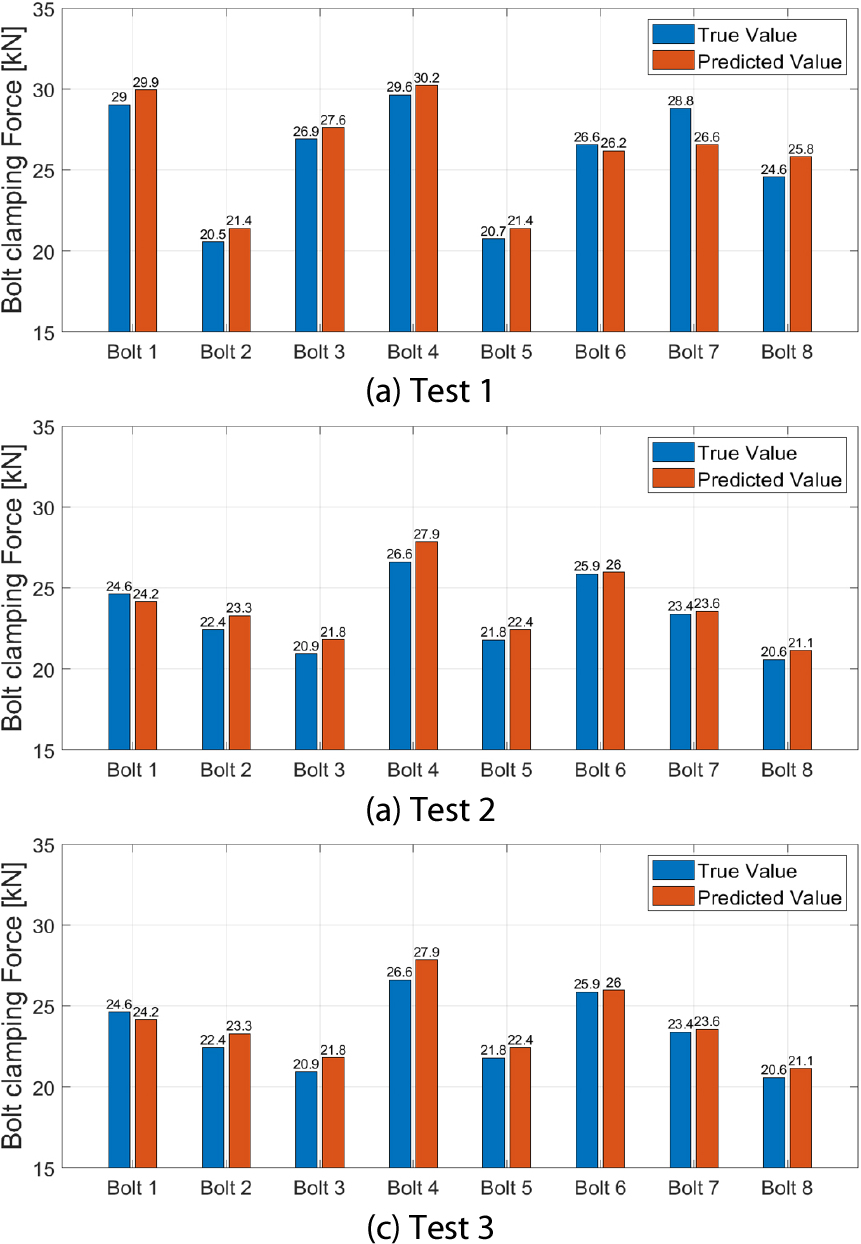
Table 6
Prediction of the bolt clamping forces for arbitrary 3 test cases
5. 결 론
본 논문에서는 8개의 볼트로 지지되는 캔틸레버 빔의 주파수응답 함수를 기반으로 초기 볼트풀림 상태에서의 볼트풀림 진단을 위한 체결력 예측 합성곱 신경망 훈련 방법을 제시하였다. 정상적으로 체결된 상태의 체결력을 30kN으로 정의하고, 초기 볼트풀림 상태를 20kN까지로 설정하여 초기 30 kN의 체결력으로 체결된 볼트의 체결력을 초기 볼트풀림 범위 내에서 변화를 주며 볼트 체결 데이터 세트를 구성하였다. Krylov 부공간 기반의 모델차수축소법을 사용하여 212,712개의 자유도를 가진 초기모델을 50차 자유도의 정확한 축소모델로 구성하여 효율적인 연산자원과 시간비용으로 주파수응답 함수를 구할 수 있었다.
생성된 주파수응답 함수 데이터는 크기와 위상에 대해 정상상태와의 차이를 정량적으로 나타낼 수 있는 가상 주파수응답 함수 기반의 MS 유사성 함수를 통해 MS 유사성 지도로 변환하여 합성곱 신경망 모델의 입력 데이터로 사용하였다. 볼트 체결력을 예측하는 합성곱 신경망의 경우, 입력 이미지의 크기에 적절한 필터의 크기와 개수, 보폭을 사용하여 3개의 합성곱 계층으로 구성하였으며, 정확도의 개선을 위해 ReLU 활성화 계층, 맥스 풀링 계층, 정규화 계층을 사용하였다. 회귀 출력 계층을 사용하여 8개의 볼트에 대한 체결력 예측을 훈련하였으며, 훈련에 사용된 데이터의 개수는 훈련 데이터 71,651개, 검증 데이터 5,000개이며, 훈련이 완료된 합성곱 신경망의 평가를 위해 5,000개의 평가 데이터를 사용하였다. 이후, 다양한 오차지표를 활용하여 신경망의 성능을 비교하였다. 본 연구를 통하여 다음과 같은 결론을 도출하였다.
첫째, 볼트 체결력에 따른 비선형성을 고려한 비선형 정적해석에서 구한 접선강성행렬을 주파수응답 해석에 사용함으로써 볼트 체결력에 따른 구조적 특성을 반영한 주파수응답 데이터를 얻을 수 있었다. 둘째, 모델차수축소법을 통한 축소모델의 생성은 주파수응답 빅데이터의 구축에 있어 전산자원과 해석시간 효율성을 위해 필수적으로 요구된다. 셋째, 볼트 체결력이 변경된 시스템의 주파수응답 함수를 정상상태와의 유사도를 정량화하여 히트맵 형식의 이미지로 가공된 MS 유사성 지도는 합성곱 신경망 훈련에 효과적으로 이용될 수 있다. 마지막으로, 주파수응답 유사성 데이터를 사용하여 초기 볼트풀림 상태에 대한 볼트 체결력 예측을 5% 미만의 상대오차의 범위 내에서 수행할 수 있었다.
향후, 추가적인 훈련 데이터의 생성을 통해 더욱 높은 신뢰도를 가지는 합성곱 신경망을 얻을 수 있을 것으로 판단되며, 초기 볼트풀림 상태에서 확장된 풀림 상태에 대한 체결력의 진단과 예측을 위해서는 체결력 범위를 달리한 새로운 데이터의 구축과 훈련이 요구된다.
