

1. 서 론
2. 유한요소해석을 통한 비 접촉 외부 자화 EM 센서 최적 설계
2.1 비 접촉 외부 자화 EM 센서 모델링
2.2 비 접촉 외부 자화 EM 센서 최적 설계
3. 다중 솔레노이드 코일 어레이의 합성 자기장 검증
4. 결 론
1. 서 론
프리스트레스트 구조물(PSC, Prestressed Concrete)은 콘크리트의 인장에 취약한 단점을 보완하기 위해 고강도 긴장재를 이용해 압축력을 미리 콘크리트에 도입시켜 구조적 효율을 증대시킨 것을 말한다(Im et al., 2012). 프리스트레스트 구조물은 구조적 장점과 경제적 효율성으로 인해 국내외적으로 건설이 활발하게 진행되고 있으며, 대한민국의 대표적인 프리스트레스트 구조물은 PSC 교량, 원전구조물 및 대공간 건축물 등이 포함된다. 그중 가장 활발하게 시공되고 있는 PSC I형 거더 교량은 시공의 장점 등으로 인해 중소규모 교량에 많이 적용되고 있으며, 한국 내에서는 1960년대 초부터 PSC I형 거더 교량이 건설되기 시작하였고 현재 공용 중인 도로 교량 중 PSC I형 거더 교량은 6,779개소이다. 하지만 최근 들어 PSC 교량은 즉시 손실 외에도 시간의 경과에 의해 노후화됨에 따라 단축, 마찰, 철근의 수축 및 이완 등 다양한 손실로 인해 PSC 텐던의 긴장 응력이 약화되고 있는 실정이다(Kim et al., 2019; Tadros et al., 2001). 만약 텐던의 긴장 응력이 설계 긴장 응력보다 낮아지면, 이는 교량의 붕괴 사고로 이어져 인사사고 및 국가적 재난으로써 큰 피해를 가져올 수 있다(Kim and Park, 2020).
이러한 문제점을 해결하고자 교량이나 프리스트레스트 콘크리트 등에 사용되는 강연선 혹은 텐던의 긴장력을 측정하기 위해 다양한 방식의 모니터링 기법이 사용되고 있다. 특히, 프리스트레스 콘크리트 빔에 탄성-자기(elasto-magnetic) 센서를 내장하여 텐던의 긴장력을 모니터링하는 방법(Halvonik et al., 2013), 역자기변형 효과를 기반으로 한 자기탄성 인덕턴스(magnetoelastic inductance) 센서를 제작하여 강연선의 긴장력을 모니터링하는 방법(Zhang et al., 2022) 등이 수행되었다. 광섬유 센서를 이용한 모니터링 기법 또한 많이 이용되고 있는데, 스트레인에 의해 격자의 파장 이동을 이용한 방식인 fiber Bragg grating(FBG) 형식의 광섬유 센서가 주로 많이 이용되고 있으며(Yao et al., 2021), 텐던 외부에 fiber Bragg grating (FBG) 형식의 광섬유 센서를 클램프하여 긴장력 손실을 모니터링하는 연구가 진행된 바 있다(Shen et al., 2018). 또한, FBG 형식의 광섬유 센서가 core wire에 내장된 PC 스트랜드를 제작하여 긴장력을 모니터링하였으며(Kim et al., 2015), 더 나아가 실제 교량에 적용하여 프리스트레스트 힘의 분포 및 변화를 모니터링하는 연구가 진행되었다(Kim et al., 2022). 최근에는 압전 물질인 PZT를 이용해서 제작한 전기-역학적 임피던스(electro- mechanical impedance) 센서를 PS텐던에 클램프하여 긴장력을 모니터링하는 연구(Le et al., 2021) 및 중립축 위치를 이용하여 이론적으로 post-tensioned precast segmental beam의 프리스트레스힘을 정량화하는 방법에 대한 연구도 진행되었다. 특히, 시뮬레이션을 통한 수치해석 결과 중립축 위치를 구하기 위한 스트레인을 측정하기 위해 스트레인 게이지를 실제 프리스트레스 빔에 부착하여 진행한 실험 결과를 통해 이를 검증했다(Li et al., 2022).
하지만, 기존의 다양한 연구들은 노출된 비부착형 프리스트레스트 텐던이나 신규 가설되는 프리스트레스트 구조물에만 적용이 가능하다는 한계점이 존재하였으며, 현재 가설되어 가용 중인 프리스트레스트 구조물에 대해서 긴장 응력을 계측하는 방법에 관한 연구는 이루어지지 않고 있는 실정이다. 따라서 본 연구에서는 외부 자화를 이용한 PSC 텐던의 긴장 응력 계측 연구를 진행하기 위한 기초 연구로써 센서 설계에 대한 연구를 진행하였다. 센서 설계의 경우 먼저, 유한요소해석 방법을 이용하여 PS 텐던의 외부 자화를 위한 외부 자계의 세기가 가장 강한 긴장 응력 계측용 센서의 설치 위치, 배치 방법, 수치 및 재질에 대해 산정하고자 다양한 케이스 별로 유한요소해석을 진행하였으며, 유한요소해석을 통해 설계한 센서를 이론적 검증을 통해 타겟 위치에서의 자화량을 검증하는 연구를 진행하였다. 이를 이용하여 외부 자화 시 타겟 위치에서의 자계의 세기를 유추할 수 있으며, 긴장 응력 변화 시 자계 세기의 변화를 이용하여 텐던의 긴장 응력을 예측할 수 있다.
2. 유한요소해석을 통한 비 접촉 외부 자화 EM 센서 최적 설계
2.1 비 접촉 외부 자화 EM 센서 모델링
비 접촉 외부 자화 EM 센서의 최적 설계를 위해 센서 헤드의 재질, 코일의 감은 수, 거치대와 타겟 위치와의 거리, 센서 헤드의 배치 간격 등을 유한요소해석을 통해 산정하기 위한 PSC I형 거더 및 센서의 모델링을 진행하였다. 유한요소해석은 상용 프로그램인 Ansys Maxwell 프로그램을 이용하였으며, 프로그램을 이용하여 모델링한 것을 Fig. 1에 나타내었다.
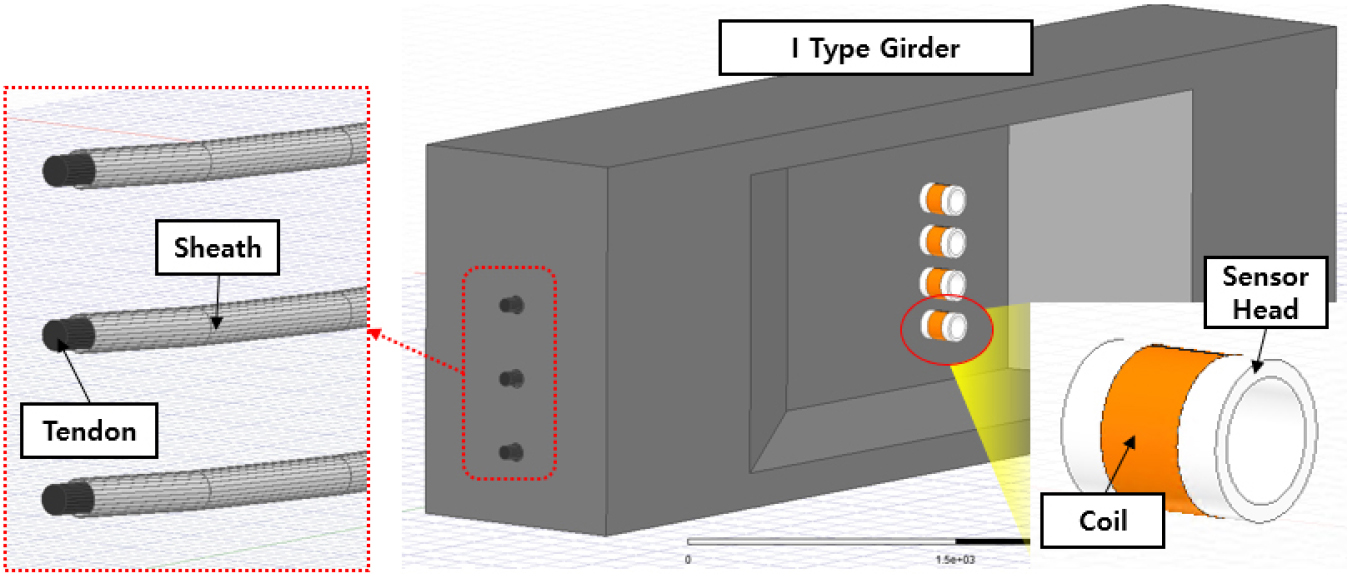
Fig. 1의 PSC I형 거더 모델링의 경우, PSC I형 거더 축소 시편과 동일한 사이즈(1300 × 6600 × 2100mm)로 모델링하였으며, 쉬스관(0.3T) 및 텐던의 두께(63Ø), 설치 위치 또한 실제와 일치하도록 모델링하였다.
또한, 콘크리트, 철근, 쉬스관, 텐던의 재료 물성을 모두 실제 시편과 동일하게 설정했으며, 설정한 재료 물성의 경우 Table 1에 나타내었다. 유한요소해석 설정의 경우 Mesh의 element length를 1mm로 설정해 주었으며 오류 퍼센트를 1%로 설정해 주어 진행하였다.
Table 1
Material Information for Modeling PSC I-Girders and Sensors
이를 통해 실제 PSC I형 거더 축소 시편을 이용한 긴장 응력 추정 실험 진행 시 자화의 경향을 예측할 수 있게 하였으며, 유한요소 해석은 코일의 감은 수, 인가하는 전류의 세기, 센서 헤드의 크기 및 개수, 센서 헤드의 설치 위치를 바꿔가며 진행하였다. 센서 헤드의 크기 조정의 이유로는 자계의 세기를 강하게 하기 위해서는 코일의 감은 수를 증가하거나, 인가하는 전류의 세기를 강하게 하는 방법이 있지만, 센서 헤드가 자기 포화상태에 이르면 더는 자계의 세기가 강해지지 않기 때문에 크기를 조절하며 최적의 센서 헤드의 크기를 찾기 위해서이다. 또한, 솔레노이드 코일의 자계 세기는 외부에서 급격히 감소하기 때문에 설치 위치도 고려 대상 중 하나로 포함시켰다.
2.2 비 접촉 외부 자화 EM 센서 최적 설계
2.2.1 좌・우측 8개씩 2쌍 배치하였을 경우
먼저, 타겟 위치에 충분한 자화량을 얻기 위해 좌측 16개, 우측 16의 센서 헤드를 동일한 간격으로 배치하여 시뮬레이션을 진행하였으며 이때 인가한 전류 및 코일의 감은 수는 Table 2와 같다.
Table 2에서 나타난 것과 같이 코일의 감은 수는 모두 600번 권선으로 하였고 각 코일에 인가되는 전류(I1~I8)는 Table 2에 나타난 것과 같이 인가하였다. 여기서 I1~I8은 Fig. 2에 나타낸 순서와 같이 코일을 위에서부터 아래로 순서대로 번호를 나타낸 것으로써 좌측 및 우측 모두 동일하다. 좌・우 8개씩 2쌍을 배치하여 유한요소해석을 진행한 경우 센서에서 발생하는 자계의 세기, 타겟 위치인 텐던에 도달하는 자속밀도 세기의 결과는 Fig. 2와 같다.
Table 2
Current set value and number of turns applied to the coil (2 pairs of 8 left and right)
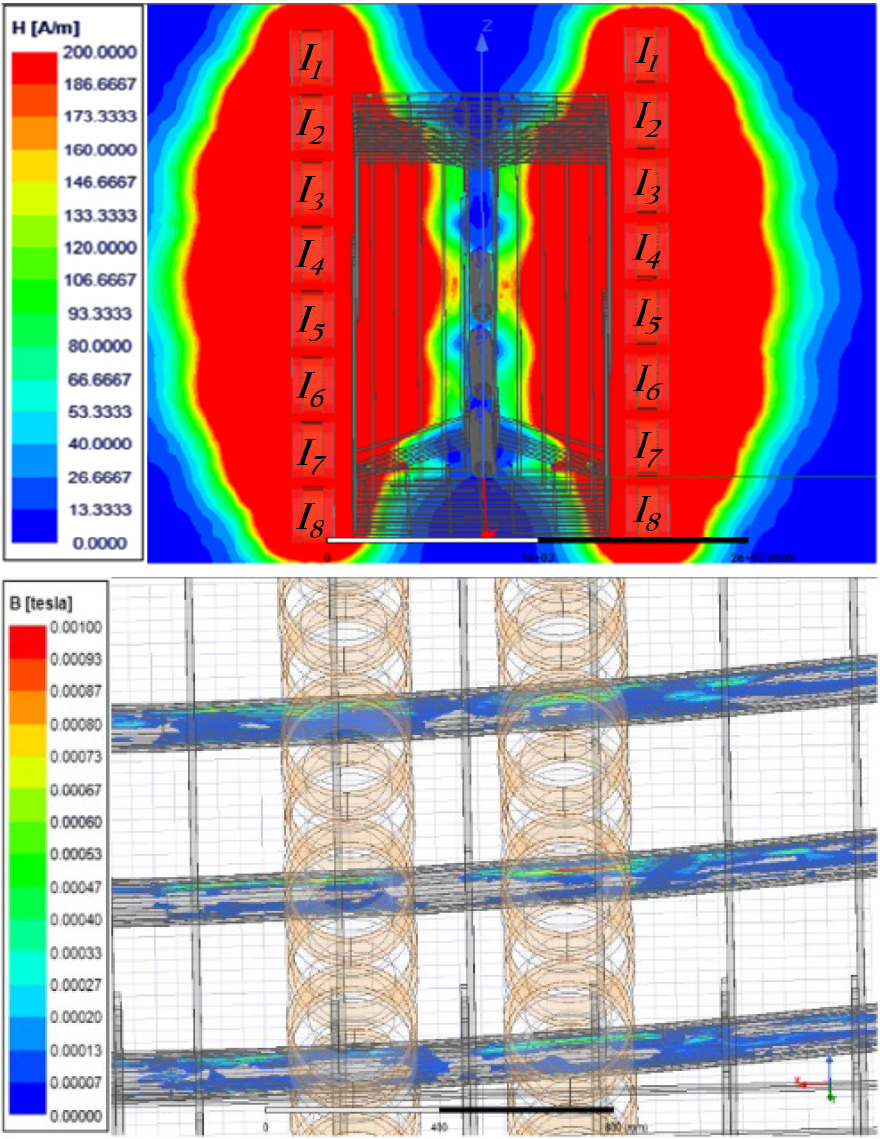
센서 헤드의 크기는 290Ø × 200mm이며, 타겟인 텐던의 최대 자화량은 약 1mT로 확인되었다. 하지만 센서 헤드의 개수가 많아, 센서 모듈의 총 무게가 무거워지는 단점이 있으며, 실사용에도 어려움이 있을 것으로 판단하여 텐던의 자화량은 유지하되 센서 헤드의 개수를 줄여 무게를 줄이고 사용성을 높이고자 하였다.
2.2.2 좌・우측 8개씩 배치하였을 경우
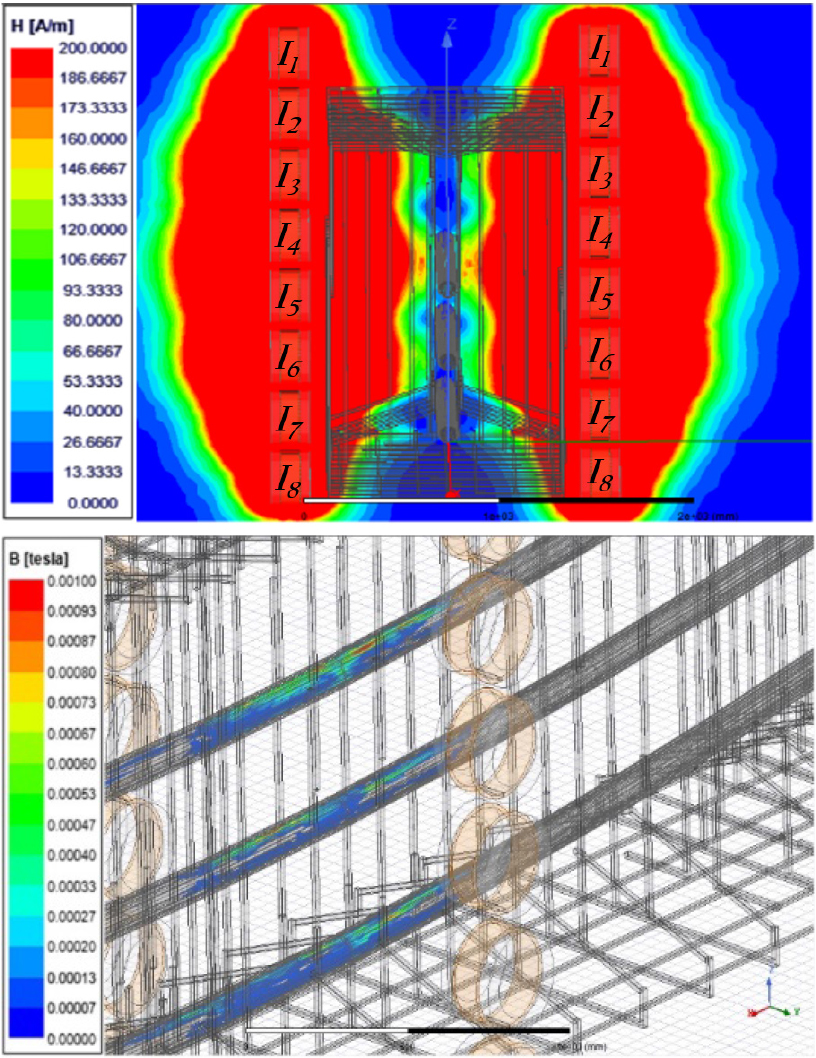
Fig. 3과 같이 센서 모듈의 총 무게를 줄이고자 기존 PSC 거더의 좌, 우측에 8개씩 2쌍을 배치하던 것에서 한 줄을 제거하여 8를 배치하는 것으로 수정해 센서 헤드의 개수를 기존의 절반으로 줄였으며, 이에 따른 타겟 위치에서의 자속 밀도의 경향성을 살펴보고자 하였다. 유한요소해석 시 센서 헤드의 크기 및 센서 헤드의 재질, 코일의 감은 수 등은 Table 2의 설정값과 동일하게 진행하였으며 인가한 전류값의 경우 Table 2의 left_1과 right_1의 값으로 설정해 주었다.
개수를 절반으로 줄인 결과, 이전과 자계의 세기 및 텐던에 걸리는 자속밀도는 1mT로 이전의 유한요소해석 결과와 차이가 거의 없는 것을 확인하였다. 이를 통해 센서 헤드의 개수는 텐던에 걸리는 자속밀도에 큰 영향을 주지 않는다는 것을 확인하였으며, 따라서 센서 헤드의 개수를 적정량만 사용하고 크기를 조절함으로써 센서 모듈의 총 무게를 줄이며 사용성 및 안정성을 높이고자 하였다.
2.2.3 좌・우측 4개씩 배치하였을 경우
센서의 총 무게 및 설치 부피를 줄이고자 PSC 거더의 좌, 우측에 4개씩 배치하였으며, 센서 헤드의 크기를 줄여서 유한요소해석을 진행하였으며, 앞선 유한요소해석 시 자계의 세기를 크게 하고자 인가하는 전류값을 높게 설정하였는데, 실제 PSC 거더에 이를 적용하기에는 무리가 있다고 판단하여 소형 power amp로 인가할 수 있는 전류값으로 수치를 조정하였다. 또한, 센서 헤드의 개수, 크기 및 인가하는 전류의 값을 줄였으며, 이에 센서 헤드의 크기에 적합한 코일의 감은 수를 조정하였다. 전체적으로 이전 유한요소해석과 달리 자계의 세기가 약해지는 경향을 보였으며 따라서, 기존의 배치를 이용하면 타겟 위치에 충분한 자속밀도의 세기를 얻을 수 없었으므로 해당 부분을 PSC의 변단부 부위에 최대한 밀착할 수 있도록 변경하여 거리에 따른 자계의 세기의 감소가 최소화될 수 있도록 진행하였다.
코일에 인가한 전류값 및 감은 수에 대해 Table 3에 나타내었으며, Table 3의 I1~I4는 코일을 위에서부터 아래로 순서대로 번호를 나타낸 것으로써 좌측 및 우측 모두 동일하게 설정해 주었다.
Table 3
Current set value and number of turns applied to the coil (4 left and right)
| number of turns | |
| 486 | |
| current set value (A) | |
| left | right |
| I1 = -2.5 | I1 = -2.5 |
| I2 = 10 | I2 = 10 |
| I3 = 10 | I3 = 10 |
| I4 = -2.5 | I4 = -2.5 |
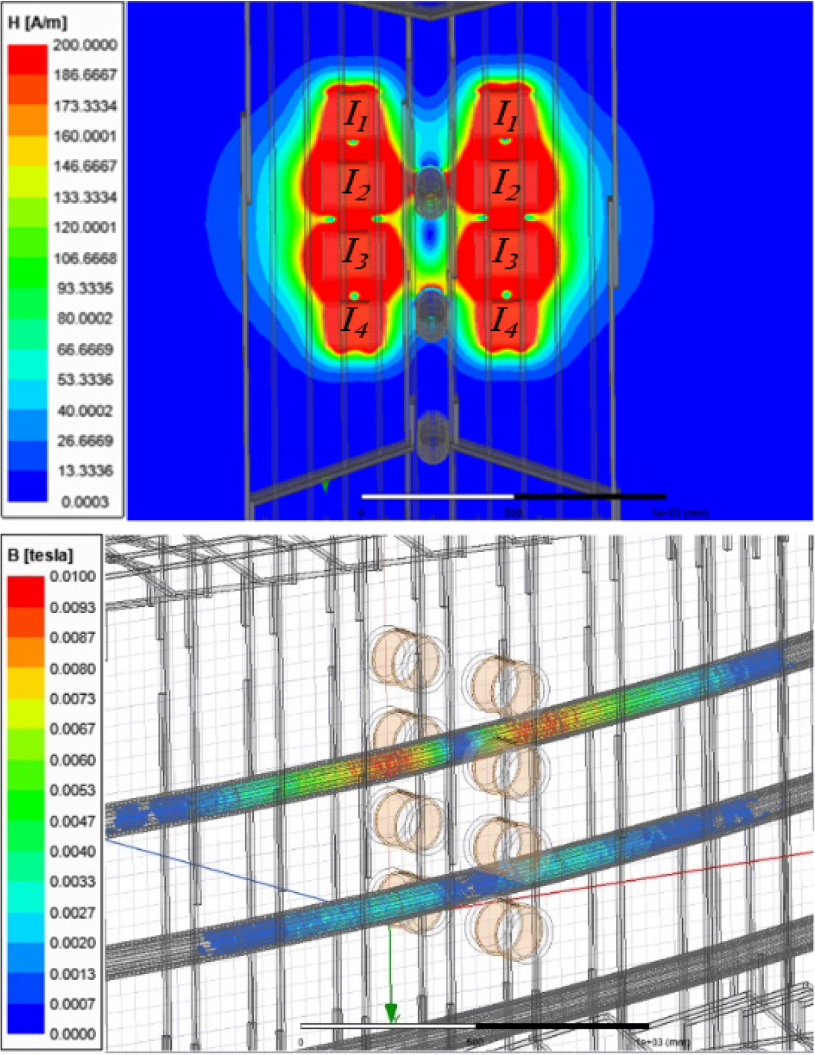
센서 헤드의 배치는 PSC I형 거더의 변단부 부분에 위치하여 타겟인 텐던과 최대한 가깝게 위치하도록 설정하였고, 센서 헤드의 크기는 170Ø × 200mm으로 하여 유한요소해석을 진행한 결과는 Fig. 4와 같다.
유한요소해석 결과, 센서 헤드의 위치를 PSC I형 거더의 변단부 위치에 설치하여 타겟 위치와의 거리를 줄였을 경우 센서 헤드의 크기 및 개수, 인가하는 전류를 줄였음에도 불구하고 타겟 위치에서의 자화량이 10mT로 기존보다 10배 가량 올라간 것을 확인할 수 있었다. 하지만 센서의 크기 및 개수가 줄어들어 바닥에 있는 텐던의 경우 자화가 잘 이루어지지 않은 것을 볼 수 있으며, 이는 센서 헤드의 위치를 상하 조정하여 타겟 위치를 조정할 수 있다. Table 4는 타겟 위치인 텐던에서 Fig 2와 3의 배치와 Fig. 4의 배치에 따른 자속 밀도를 나타낸다.
Table 4
Magnetic flux density at the target position according to the arrangement
| Tendon position | Fig. 2, 3 arrangement | Fig. 4 arrangement |
| No. 1 (top) | 1mT | 10mT |
| No. 2 (middle) | 1mT | 6mT |
| No. 3 (bottom) | 0.93mT | - |
이에 외부 비접촉 EM 센서의 최종 모델로 해당 유한요소해석으로 도출한 센서의 크기 및 코일의 감은 수, 인가하는 전류값, 설치 위치를 선정하였으며, 타겟인 텐던에 걸리는 자속밀도의 값을 산정한 결과를 이용하여 이론적으로 계산하여 검증하고자 하였다.
3. 다중 솔레노이드 코일 어레이의 합성 자기장 검증
특정 지점에서의 자기장을 강하게 하도록 전류의 조절이 가능한 여러 개의 코일 어레이를 구성하여 자기장을 합성 혹은 집속시킬 수 있다(Choi et al., 2016). Fig. 5와 같이 길이가 이고 단위 길이 당 감은 수(turn density)가 각각 인 개의 솔레노이드가 축 상에 정렬되어 있고 각 솔레노이드로부터 임의의 점 까지의 반경거리를 , 방위각을 , 직선거리를 일 때, 점 까지의 직선거리가 로 고정되어 있을 때, 에서의 합성 자기장은 다음과 같이 표현할 수 있다.
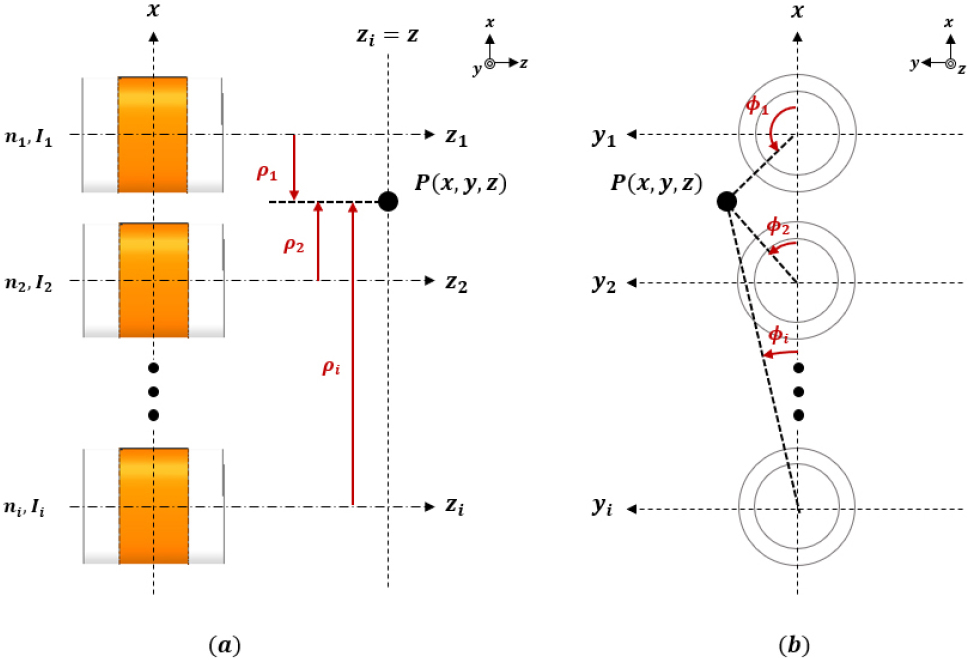
단, 이고 는 제1종 완전 타원적분, 는 제2종 완전 타원적분, 는 제3종 완전 타원적분을 의미한다. 또한, 는 에서 , 에서 를 의미하며 는 솔레노이드 번호 뿐만 아니라 𝜁에도 변화한다는 것을 확인할 수 있다. 식 (1)에서 (3)을 MATLAB을 통해 구현하여 다중 솔레노이드 코일에 의한 합성 자기장을 계산하는데 사용되었다. Fig. 6과 같이 동일한 다중 코일 어레이가 중심축에 대칭적으로 놓여있으면 중심축 위의 지점에서 반경 방향 자기장은 상쇄되고 길이 방향() 자기장을 2배가 된다. 즉, 중심축에서는 축 방향 합성 자기장을 나타내는 식 (3)에 2배를 한 것이 합성 자기장이 된다. 계산에 이용된 고정 변수와 그 값은 Table 5에 정리했다.
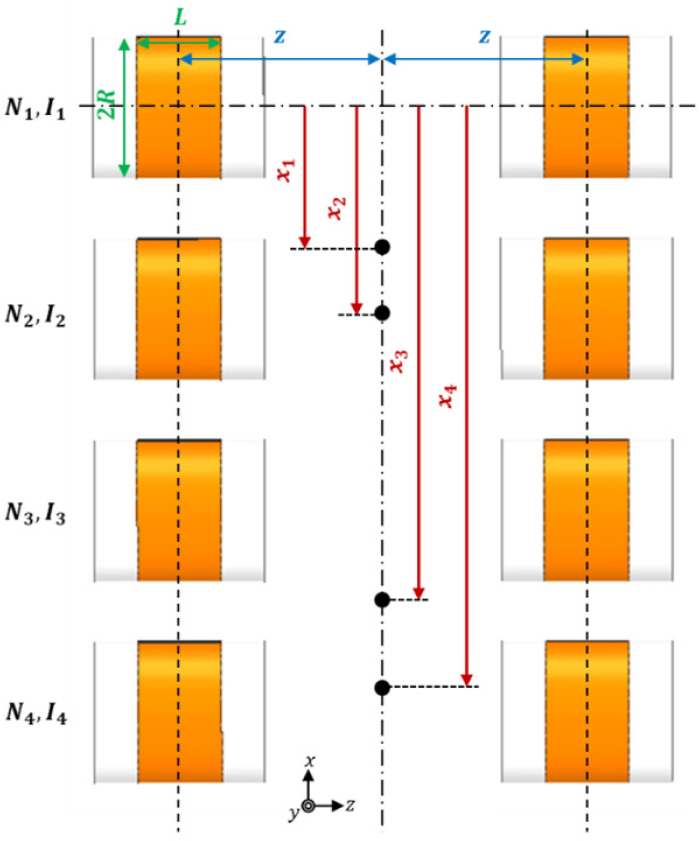
Table 5
Fixed variables used in the calculation
솔레노이드 코일이 철이나 니켈 프레임에 감겨 있으면 비오-사바르 법칙에서 진공의 투자율(혹은 자유 공간에서의 투자율) 를 사용하는 것이 적절하지 않으며, 이 경우 유효 자기 투자율 를 고려해야 한다. 프레임의 투자율 𝜇, 외경 , 두께 일 때 유효 자기 투자율 은 식 (4)와 같이 유도된다.
따라서, 유효 비투자율 는 식 (5)와 같이 나타낼 수 있다.
프레임으로 사용된 재료는 니켈이며 니켈의 비투자율 100이다. 이때, 프레임의 외경이 = 131.7mm이고 두께가 = 1.7mm일 때, 유효 비투자율 는 6.0456으로 계산된다.
이 유효 비투자율을 반영한 다중 솔레노이드 코일 어레이 합성 자기장의 계산 결과를 Table 6에 나타내었으며, 다중 솔레노이드 코일 어레이가 유한요소해석 결과와 동일하게 타겟 위치에서 10mT 정도의 자기장을 생성할 수 있다는 것을 검증하였다.
Table 6
Calculation results of the synthesized magnetic field reflecting the effective permeability x = 6.0456 at each point
4. 결 론
본 연구에서는 PSC I형 거더의 PS 텐던에 대한 잔여 긴장 응력 측정을 위한 기초연구로써 외부 자화를 기반으로 하는 EM (Elasto-Magnetic) 센서의 최적 설계를 위한 유한요소해석 및 이론적 검증을 위한 연구를 수행하였다. 비 접촉 외부 자화 기반 EM 센서는 응력에 의해 강자성체의 자기이력이 변하는 탄성-자기 이론을 이용하여 강자성체에 작용되는 응력을 추정할 수 있다. 이를 실제 현장에 적용하기 앞서 본 논문에서는 유한요소해석을 이용하여 PSC 거더 외부에서 발생시킨 자기장이 PSC 거더 내부의 PS 텐던까지 영향을 줄 수 있는 코일 배치 및 크기를 선정하고자 하였으며, 이론적 검증을 통해 비 접촉 외부 자화 EM 센서를 활용하여 PSC I형 거더 내부 텐던의 자화가 가능함을 확인하였다. 본 연구를 통해 도출한 결론은 다음과 같다.
1) 외부 자화 시 타겟 위치와 외부 자화 시스템의 거리 요소가 센서 헤드의 크기, 코일의 감은 수, 인가하는 전류 등의 요소보다 중요하며 거리를 가깝게 할수록 같은 조건에서 높은 자속 밀도를 타겟 위치에서 얻을 수 있었다. 따라서, PSC 구조물의 변단부 부위가 외부 자화 시스템 설치 시 타겟 위치인 텐던과 외부 자화 시스템의 거리가 가장 가까운 위치로 선정하였으며, 이에 거리에 따른 자계의 세기의 감소가 가장 적어 외부 자화 시 다른 부분 대비 가장 효과적으로 텐던을 자화시킬 수 있음을 확인하였다.
2) 자기장 집속의 위치 변화는 전류의 세기, 거치대의 높이, 센서 헤드의 설치 방법 등 다양한 요소를 통해 그 위치를 변화시킬 수 있음을 확인하였다. 이론적 검증 결과, 자기장 집속 시 PS 텐던의 맨 위와 가운데 텐던에 자화가 잘 되는 모습을 볼 수 있었으며, 가장 아래의 텐던의 경우 자화량이 다소 부족한 것을 확인할 수 있었다.
하지만, 본 논문의 이론적 검증을 진행함에 있어 전류를 인가하였을 때 코일의 온도 상승으로 인한 저항의 증가 및 코일의 감은 수에 의한 저항의 증가로 인한 전류 값의 변화를 실험을 진행하여 측정해야 한다. 따라서, 추후 연구로써 본 이론 및 저항에 따른 전류 값의 보상을 진행함으로써 비 접촉 외부 자화 EM 센서를 이용한 PS 텐던의 긴장 응력 변화에 따른 계측 데이터의 경향성 확인 및 PS 텐던의 잔존 긴장 응력을 계측하고자 한다.
