

1. 서 론
2. 연구 방법
2.1 차원축소모델의 구성
2.2 트랜스포머 기반 시계열 예측
2.3 센서 정보를 활용한 연산자 추정 및 응답 보정
3. 수치 예제
3.1 수치 예제 1: 캔틸레버 보(Cantilever Beam)
3.2 수치 예제 2: 박스형 보(Box-type Beam)
4. 결 론
1. 서 론
유한요소해석은 지배방정식의 이산화를 통해 구조물의 거동을 수치적으로 근사하는 방법으로 차량, 항공 우주 등 다양한 산업 분야에서 설계 검증 및 성능 평가를 위해 널리 활용되고 있다(Koohi et al., 2014; Liu et al., 2022).
최근에는 구조물의 형상이 복잡해지고 운용 환경이 다양해짐에 따라, 단순화된 모델만으로는 실제 시스템의 복합적인 거동을 정확하게 모사하는데 한계가 있다. 따라서, 신뢰성 높은 해석 결과를 확보하기 위해서는 많은 자유도를 갖는 고정밀 유한요소모델(high-fidelity finite element model)의 구축이 요구된다. 그러나, FE 모델의 정밀도 향상은 필연적으로 자유도의 급격한 증가를 수반하며, 이는 시뮬레이션 해석에 소요되는 계산 비용의 증가로 이어진다. 이러한 과도한 계산 비용 문제를 해결하고 효율적인 해석을 수행하기 위해 차원축소모델(reduced order model, ROM)을 활용한 연구가 활발히 수행되고 있다(Lee et al., 2021, 2024; So and Lee, 2025). 대표적인 차원축소기법 중 하나인 적합직교분해(proper orthogonal decomposition, POD)는 기존 시스템의 자유도 대비 적은 수의 기저를 사용하기 때문에 연산에 소요되는 시간을 절감하는 동시에 고정밀 해석에 근접한 수준의 정확도를 확보할 수 있다. 최근에는 이러한 이점으로 인해 비선형 응답 추정, 최적 설계, 디지털 트윈, 시계열 예측 등 다양한 분야에서 축소 모델을 활용한 연구가 수행되고 있다(Hesthaven and Ubbiali, 2018; Lee and Cho, 2018).
최근에는 일부 과거 시간 구간에서 확보된 하중 및 응답 이력 데이터를 활용하여 미래 시간 구간의 응답을 직접 예측하는 시계열 예측 관련 연구가 꾸준히 수행되고 있다(Hareendran and Alipour, 2022). 이러한 방법은 초기 일부 구간에서의 해석 및 계측된 정보를 기반으로 이후 구간의 응답을 추정함으로써, 전체 시간 구간에 대한 고비용 유한요소해석을 수행하지 않고도 응답을 효율적으로 근사할 수 있다는 점에서 실용적이다. 다만, 고정밀 유한요소모델과 같이 많은 자유도를 갖는 시스템에서 전체 자유도 응답을 그대로 학습 대상으로 사용하는 경우, 입출력 차원이 과도하게 커져 학습 비용이 급증하고 예측 성능이 저하될 수 있어 시계열 예측 모델과 차원축소모델을 결합하여 연산 효율을 개선하려는 연구가 수행되고 있다(Simpson et al., 2023). 그러나 이러한 예측 모델은 계산 부담을 완화할 수는 있으나, 실제 모델과 해석 모델 사이에 존재하는 근본적인 모델링 특성 차이는 극복하지 못한다.
실제 운용 중인 구조물은 재료 물성의 변화, 경계 조건의 완화, 예상치 못한 환경 요인 등으로 인해 초기 설계 단계의 모델과는 상이한 거동을 나타낸다. 이러한 모델 불일치를 개선하기 위해 운용 단계에서 실제 모델의 일부 위치에 부착된 센서로부터 획득한 계측 데이터를 기반으로 출력을 보정하는 연구가 수행되고 있다(Wu and Smyth, 2007). 이러한 방법은 물리적 파라미터나 시스템 행렬을 직접 업데이트하는 방식과 달리, 예측된 응답 자체를 업데이트함으로써 제한된 센서 정보로도 오차를 개선할 수 있다는 점에서 실용적이다. 따라서, 본 연구에서는 트랜스포머 기반의 시계열 예측과 잔차 기반 보정 기법을 결합하여 비선형 구조물의 동적 응답을 업데이트 하는 절차를 제안한다.
본 논문의 구성은 다음과 같다. 2장에서는 트랜스포머 기반 시계열 예측 모델과 잔차 기반 응답 업데이트 절차를 서술한다. 3장에서는 수치 예제를 통한 제안 기법의 성능을 검증하며, 4장에서는 결론을 도출한다.
2. 연구 방법
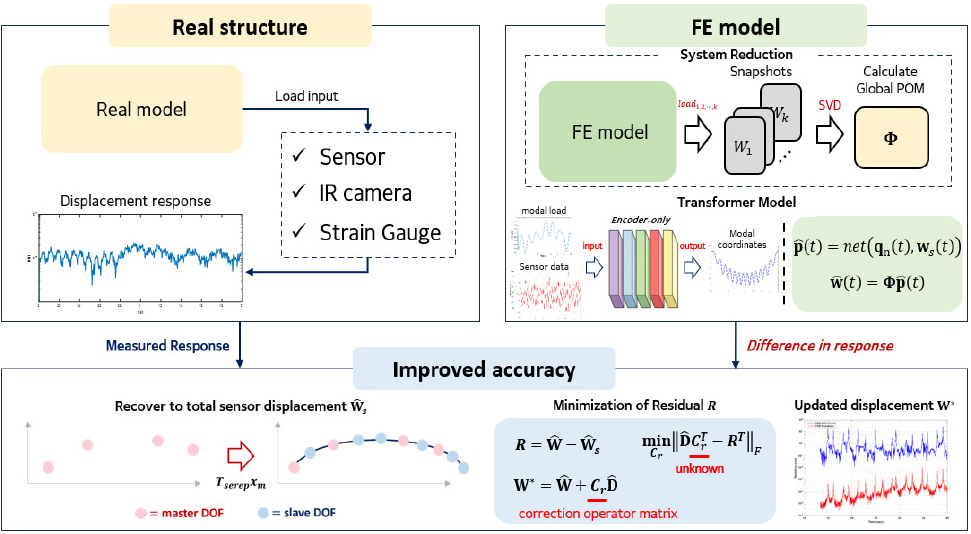
본 연구에서 제안하는 비선형 응답 업데이트 프레임워크는 구조물에 센서가 부착되어 운용되는 실제 센서 계측 환경을 모사하기 위해 유한요소해석 기반의 기준 응답으로부터 특정 절점의 변위 응답을 추출하여 센서 변위 데이터를 구축하며, 이를 활용하여 예측 응답과 기준 응답 간의 차이를 효율적으로 보정하도록 구성된다.
본 연구에서 활용된 센서 데이터는 실제 센서 환경을 가정하기 위해 유한요소해석을 통해 얻은 일부 변위 응답으로부터 추출하였으나, 실제 구조물에서 계측된 데이터를 사용하더라도 제안된 업데이트 절차는 동일하게 적용 가능하다.
본 장에서는 초기 시간 구간에서 수행한 유한요소해석 결과를 기반으로 차원축소모델을 구성하고, 트랜스포머 모델을 통해 학습에 포함되지 않은 구간의 응답을 추정하는 절차를 서술한다. 이후 일부 자유도에서 추출한 센서 변위와 예측 응답 간의 잔차를 활용하여 보정 연산자를 추정하고, 이를 활용하여 예측 응답을 업데이트하는 과정을 서술한다. 제안하는 프레임워크는 Fig. 1과 같다.
각 절차에 활용된 적합직교분해(Kerschen et al., 2005) 및 트랜스포머 모델(Vaswani et al., 2017)은 기존에 널리 활용되는 방법론을 따른다. 따라서, 각 기법의 상세한 수학적 정식화보다는 예측 응답 생성과 기반 업데이트를 결합한 전체 프레임워크 구성 및 적용 절차를 중심적으로 다루며, 각 기법의 자세한 이론적 배경은 관련 참고문헌으로 대신한다.
2.1 차원축소모델의 구성
본 절에서는 유한요소해석으로부터 획득한 하중 및 변위 데이터를 트랜스포머 학습에 적합한 저차원 데이터로 변환하기 위한 절차를 서술한다. 전체 시계열은 시간 축을 기준으로 학습 구간과 테스트 구간으로 분할한다. 전체 시계열의 이산 시간 인덱스를 이라 정의한다. 이때, 분할 인덱스 를 기준으로 학습 구간은 테스트 구간은 으로 정의한다. 여기서, 는 학습 구간의 마지막 시간 스텝을 의미한다.
먼저 유한요소해석을 통해 학습 구간의 각 이산 시간에서의 변위 응답 데이터를 수집한다. 각 시점에서 변위 벡터 w(t)를 열 방향으로 나열하여 다음 식 (1)과 같이 스냅샷 행렬을 구성한다.
구성된 스냅샷 행렬 W에 대해 특이값 분해를 수행하면 스냅샷 행렬은 다음 식 (2)와 같이 표현된다.
여기서, 는 각각 좌특이행렬, 특이값 행렬, 우특이행렬을 의미한다. 전체 모드를 사용하는 대신 전체 에너지의 대부분을 포함하는 상위 개의 지배적인 모드를 선택하여 차원 축소를 수행한다. 축소 기저 가 결정되면, 전체 시스템의 변위 응답은 다음 식 (3)과 같이 축소 기저와 모달 계수의 곱으로 근사할 수 있다.
여기서, 는 학습 구간에 대한 모달 계수로 다음 식 (4)와 같이 정의한다.
트랜스포머의 입력은 학습 구간에서의 하중 정보와 일부 센서 절점에서의 변위 데이터를 포함한다. 하중 벡터를 로 정의하면 모달 하중 은 다음 식 (5)와 같이 정의한다.
2.2절에서 트랜스포머 모델은 각 시점에서의 모달 하중과 샘플링된 센서 변위로 구성된 시계열 입력으로부터, 해당 시점의 모달 계수 를 추정하도록 학습된다.
2.2 트랜스포머 기반 시계열 예측
본 절에서는 모달 하중 및 일부 자유도에서의 센서 변위로부터 축소 좌표를 추정하기 위해 구성한 트랜스포머 회귀 모델의 학습 및 추정 절차를 서술한다. 이산화된 시점 에서 입력 벡터 x(tk)는 다음 식 (6)과 같이 모달 하중 과 센서 자유도에서의 변위 로 정의한다.
출력 벡터는 축소 기저로부터 얻은 동일 시간 구간의 축소 좌표 p(tk)로 설정한다. 본 연구에서는 사전에 알고 있는 입력으로부터 동일 구간의 축소 좌표를 복원하는 회귀 문제로 정의한다.
시계열 재구성 문제에서는 자연어 처리의 생성 문제와 달리 디코더(decoder) 구조가 필수적이지 않으므로 본 연구에서는 인코더(encoder)만을 활용한 트랜스포머 구조를 사용하였다(Choi et al., 2024). 인코더 기반 트랜스포머의 구조는 Fig. 2와 같다.
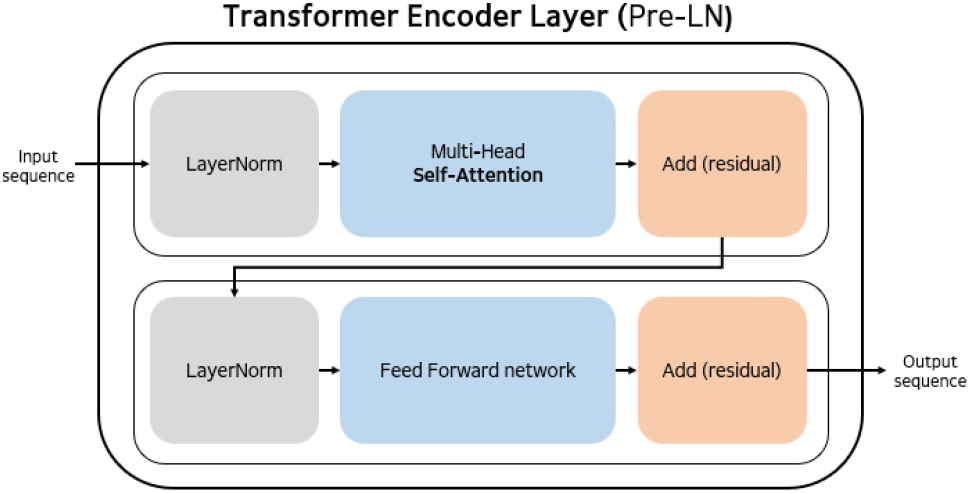
각 인코더 블록은 Pre-LN 구성을 따르며, 입력에 정규화 과정을 수행한 다음 셀프 어텐션(self-attention)을 수행하고, 잔차 연결을 적용하여 출력을 갱신한다. 이어서 동일하게 층 정규화(layer normalization) 과정을 수행한 다음 전향 신경망(feed-forward network)을 통과시키고, 잔차 연결을 적용하여 블록 출력을 구성한다. 본 연구에서 셀프 어텐션 연산은 다음 식 (7)과 같이 정의된다.
여기서, 는 각각 입력 시퀀스로부터 선형 변환으로 구성된 세 행렬이며, 는 내적 값의 스케일을 조정하기 위한 채널 차원으로 각 시점의 축소 좌표 예측값 를 추정한다.
이산 시간 에서 입력 와 출력 를 바탕으로, 트랜스포머 학습은 길이 L의 슬라이딩 윈도우로 구성된 데이터 쌍(Xi, Pi)에 대해 수행하며, 번째 샘플은 다음 식 (8), (9)와 같이 정의한다.
여기서, 는 번째 시간 구간의 시작 인덱스이며, 인접 시간 구간의 시작점은 구간 이동 간격에 따라 로 이동한다. L은 한 학습샘플에 포함되는 시점의 개수를 의미하며, 이동 간격이 작을수록 시간 구간이 더 많이 중복되게 되어 전체 학습 샘플 수가 증가한다.
학습이 완료된 트랜스포머는 최종 출력층을 거쳐 윈도우 내 모든 시점에 대한 축소 좌표 예측값 을 추정한다.
2.3 센서 정보를 활용한 연산자 추정 및 응답 보정
트랜스포머가 추정한 모달 좌표를 전체 자유도 변위로 복원하는 식은 다음 식 (10)과 같다.
여기서, 는 근사된 변위 응답을 의미한다. 예측 구간에서는 일부 절점에서 샘플링된 센서 변위 데이터만 주어진다고 가정하며, 이를 활용하여 근사 응답을 보정한다. 먼저, 근사 응답으로부터 모드 정보를 추출하여 시스템 등가 축소 확장 프로세스(system equivalent reduction expansion process, SEREP) 기반 변환행렬을 구성하고, 센서 데이터로부터 전체 자유도로 복원한 응답 을 계산한다(Koutsovasilis and Beitelschmidt, 2008). 이후, 트랜스포머 근사 응답과 센서 기반 복원 응답의 차이를 예측 구간 잔차 로 정의한다(식 (11)).
보정 연산자 는 선형 최소자승 문제로 계산되는 형태를 사용하며, 관련 정식화는 참고문헌에 서술되어 있다(Benner et al., 2020). 트랜스포머가 추정한 모달 계수 를 사용하여 특성 행렬 를 다음 식 (12)와 같이 구성한다.
여기서, 연산자 는 2차 및 3차 항 생성 시 발생하는 중복항을 제거한 크로네커(kronecker) 곱을 의미한다. 보정 연산자는 다음 식 (13)과 같은 최소자승 문제를 풀어 연산자를 추정한다.
위의 식으로부터 추정된 보정 연산자 를 이용하여 보정한 전체 자유도 변위 응답 W*은 다음 식 (14)와 같다.
3. 수치 예제
본 장에서는 제안한 비선형 응답 보정 프레임워크의 성능을 검증하기 위해 두 가지 구조물 예제를 대상으로 수치 예제를 수행한다.
첫 번째 예제로는 하중 작용 시, 기하학적 비선형성이 나타나는 캔틸레버 보 모델을 선정하였다. 두 번째 예제로는 보다 복잡한 형상과 많은 자유도를 가지며, 하중 작용 부 주변에서 국부적인 비선형 변형이 동반되는 박스형 보 모델을 고려하였다.
본 연구에서 제안한 응답 보정 기법과 관련된 모든 수치 계산은 Windows 11 운영체제에서 MATLAB R2025a를 사용하여 수행하였다. 각 예제는 3.5 GHz로 동작하는 Octa-core Intel i9 11900K 프로세서 및 128GB RAM을 장착한 PC에서 계산하였다. 각 예제에서 사용한 유한요소모델의 절점, 요소, 자유도 수는 Table 1에 정리하였다.
Table 1.
Finite element information
| Model | Cantilever Beam | Box-type Beam |
| Element | Q4 | 2D Shell |
| Number of Nodes | 486 | 1734 |
| Number of Elements | 400 | 1733 |
| Number of DOFs | 972 | 10404 |
| Number of Modes | 24 | 25 |
| Number of Sensor Nodes | 15 | 25 |
본 연구에서 제안된 기법의 성능을 평가하기 위해 각 모델별로 사용한 모드 및 센서의 개수를 특정 상수 값으로 고정하여 검증을 수행하였다. 이때, 각 모델에 적용되는 모드 및 센서 개수는 해당 구조물의 기하학적 복잡성과 비선형 거동의 특성에 따라 상이하다. 따라서, 제안된 기법을 적용함에 있어 사용자는 대상 모델의 특성을 사전에 검토하고 적절한 모드 및 센서 개수를 선정하는 과정이 필요하다. 본 수치 예제에서 센서 개수는 고정된 값을 사용하였으나, 극단적으로 적은 수를 제외하고는 방법의 일반성을 유지한다. 또한 센서 위치는 임의로 선정하였으며, 센서 개수와 최적 위치 선정과 관련한 추가 연구의 필요성이 있다. 본 예제에서는 유한요소해석을 통해 결과를 기준 응답으로 사용하고 보정된 응답 간의 상대 오차를 통해 정확도를 검증한다.
3.1 수치 예제 1: 캔틸레버 보(Cantilever Beam)
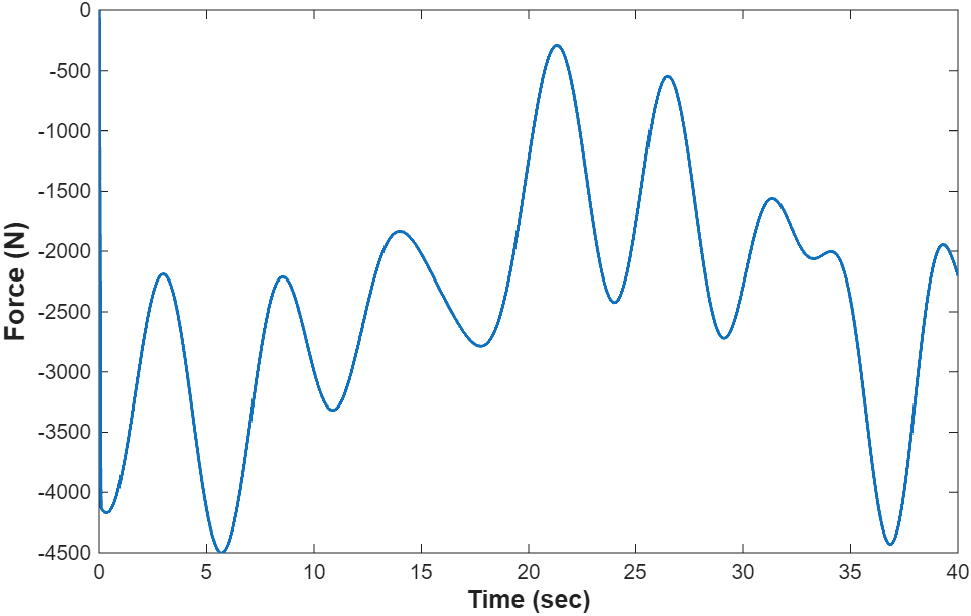
본 연구에서는 제안한 비선형 응답 보정 절차를 검증하기 위한 첫 번째 예제로 충분한 비선형 응답을 유도하기 위해 설정된 캔틸레버 보 구조물을 고려한다. 구조물의 물성치는 탄성 계수 = 50MPa, 밀도 𝜌 = 1600kg/m3, 포아송 비 𝜈 = 0.4의 고분자 탄성체를 가정하였다. 보의 길이는 10m, 높이는 0.2m, 폭은 0.4m로 설정하였다. 보의 형상은 Fig. 3과 같으며, 보의 끝단에 수직 방향으로 가해지는 하중의 크기는 Fig. 4와 같다.

학습 데이터 구성을 위한 시간 구간 설정은 다음과 같다. 전체 시뮬레이션 시간은 40초로, 초기 [0, 13]초 구간 데이터를 활용하여 트랜스포머 모델 학습을 수행하였다. 이후 [13, 40]초 구간은 제안된 기법을 적용하여 트랜스포머 모델이 근사한 변위 응답을 보정하고, 성능을 평가하기 위한 구간으로 설정하였다. 트랜스포머 학습을 위한 모델의 구조 정보는 Table 2와 같다.
Table 2.
Training sample and model parameter information
| Sliding-Window Length | 200 |
| Stride | 25 |
| Model Dimension | 64 |
| Number of Heads | 4 |
| FFN Hidden Dimension | 128 |
| Number of Encoder Blocks | 2 |
| Self-attention | Non-causal |
제안된 프레임워크의 보정 정확도를 검증하기 위해, 보의 길이 을 기준으로 한 상대 위치 = 0.5, 0.75에서의 절점(node)을 선정하고 각 지점의 변위 응답 이력을 비교하였다. Fig. 5는 두 절점에서의 , 방향 변위 이력에 대한 기준 응답(FEM), 트랜스포머 기반 예측 응답(predicted), 그리고 제안된 기법으로 보정된 응답(updated)을 비교한 결과를 나타낸다. 예측 응답은 단일 데이터셋 기반으로 학습되었기 때문에 구조물의 다양한 응답 패턴을 충분히 반영하지 못하며, 이에 따라 예측 구간에서 기준 응답과 차이를 보인다. 이는 제한된 입력 정보를 이용한 학습으로 인해 모델이 실제 구조물의 비선형 거동을 적절하게 추정하는데 한계가 있기 때문으로 판단된다.
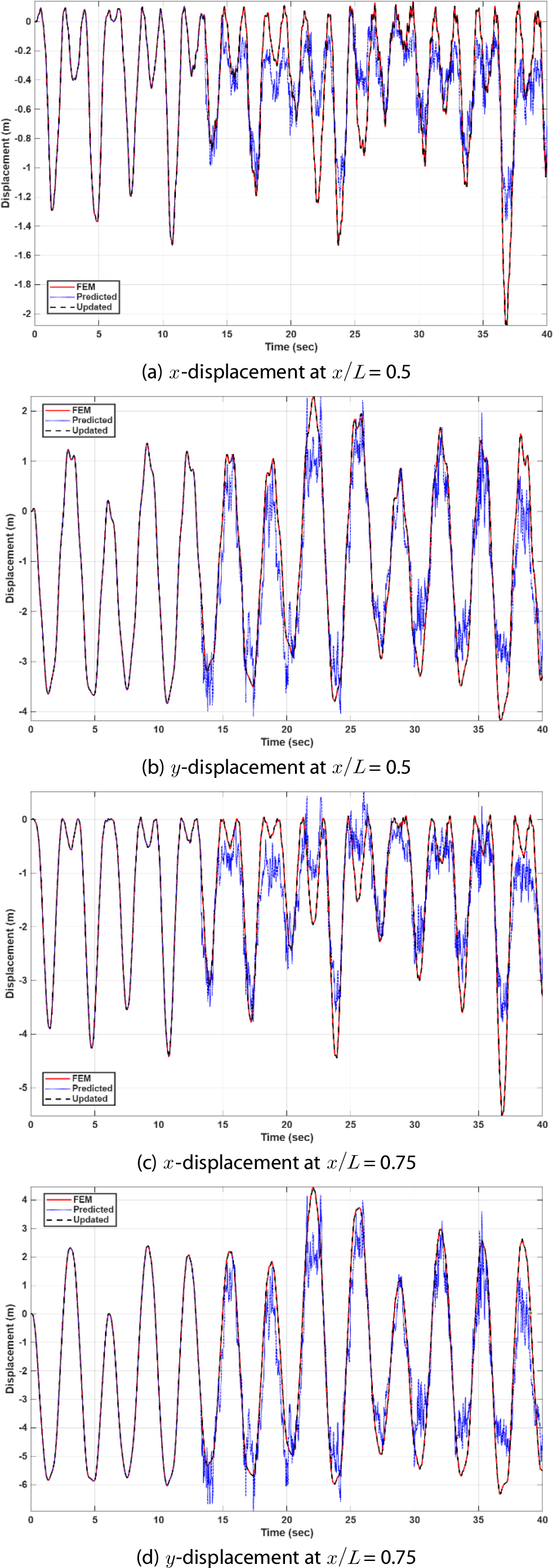
트랜스포머 모델에 의해 근사된 예측 응답은 구조물의 비선형 동적 거동의 진동 양상은 전반적으로 추종하고 있으나, 기준 응답과 비교하여 일정 수준의 오차가 존재하는 것으로 나타났다. 반면, 일부 센서 데이터를 활용하여 보정 연산자를 추정하고 이를 적용한 보정 응답은 모든 검토 지점에서 기준 응답과 오차가 유의미하게 감소하여 구조물의 거동을 적절하게 근사하는 것을 확인하였다.
제안된 기법의 정량적인 보정 성능을 평가하기 위해, 각 타임 스텝에서의 전체 자유도에 대한 상대 오차 노름(norm)을 계산하였다. 여기서, 시간 에서의 상대 오차 노름 은 다음 식 (15)와 같다.
여기서, 는 기준 변위 벡터, 는 예측 또는 보정된 변위 벡터를 의미하며, 는 전체 자유도의 유클리드 노름이다. Fig. 6은 예측 구간에서의 상대 오차 이력을 나타낸다.
트랜스포머 기반 근사 응답은 예측 구간에서 유의미한 오차가 발생하는 반면, 보정 후에는 해당 오차가 예측 구간 시작과 동시에 급격히 감소하고 이후에도 상대 오차가 10-4 이내의 수준에서 안정적으로 유지된다. 이는 제안된 기법이 특정 지점에 국한되지 않고 구조물 전체의 자유도에 대해 안정적인 보정이 가능함을 보여준다.
3.2 수치 예제 2: 박스형 보(Box-type Beam)
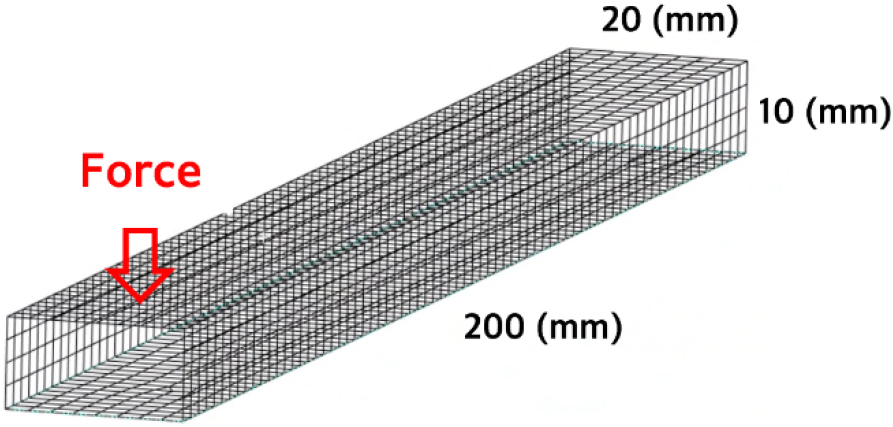
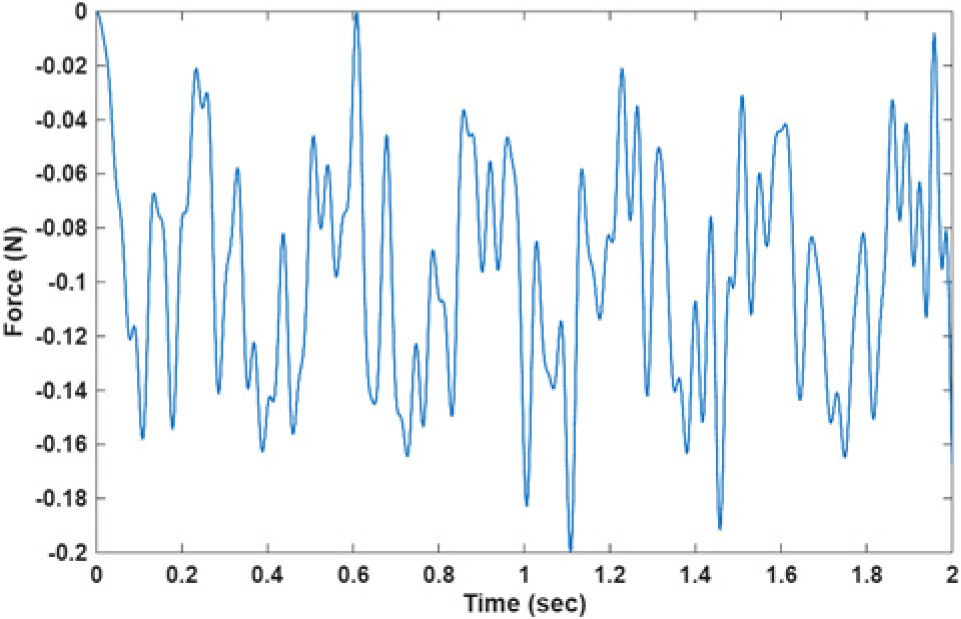
본 연구에서는 제안한 비선형 응답 보정 절차를 검증하기 위한 두 번째 예제로 박스형 보를 선정하여 증가된 자유도와 국부 비선형이 동반되는 조건에서의 적용 가능성을 검증한다. 구조물의 물성치는 탄성 계수 = 50MPa, 밀도 𝜌 = 1200kg/m3, 포아송 비 𝜈 = 0.42의 고분자 탄성체를 가정하였다. 보의 길이는 200mm, 높이는 10mm, 폭은 20mm, 두께는 0.5mm로 설정하였다. 보의 형상은 Fig. 7과 같으며, 보의 수직 방향으로 가해지는 하중의 크기는 Fig. 8과 같다.
학습 데이터 구성을 위한 시간 구간 설정은 다음과 같다. 전체 시뮬레이션 시간은 2초로, [0, 0.6]초 구간은 학습 구간, [0.6, 2]초 구간은 테스트 구간으로 설정하였다. 트랜스포머 학습을 위한 데이터 구성 및 모델 구조는 Table 3과 같다.
Table 3.
Training sample and model parameters
| Sliding-Window Length | 50 |
| Stride | 10 |
| Model Dimension | 64 |
| Number of Heads | 4 |
| FFN Hidden Dimension | 128 |
| Number of Encoder Blocks | 2 |
| Self-attention | Non-causal |
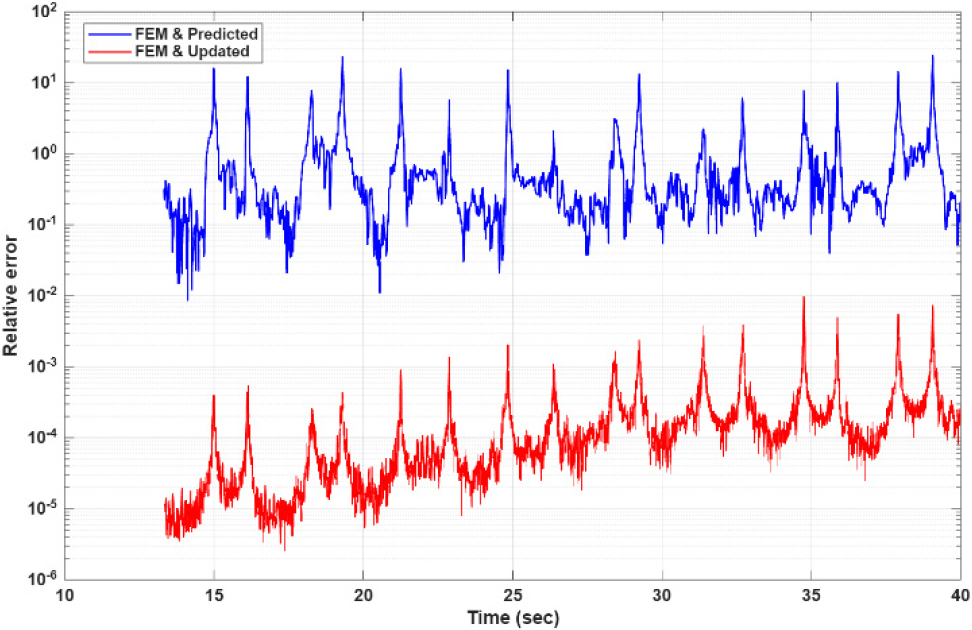
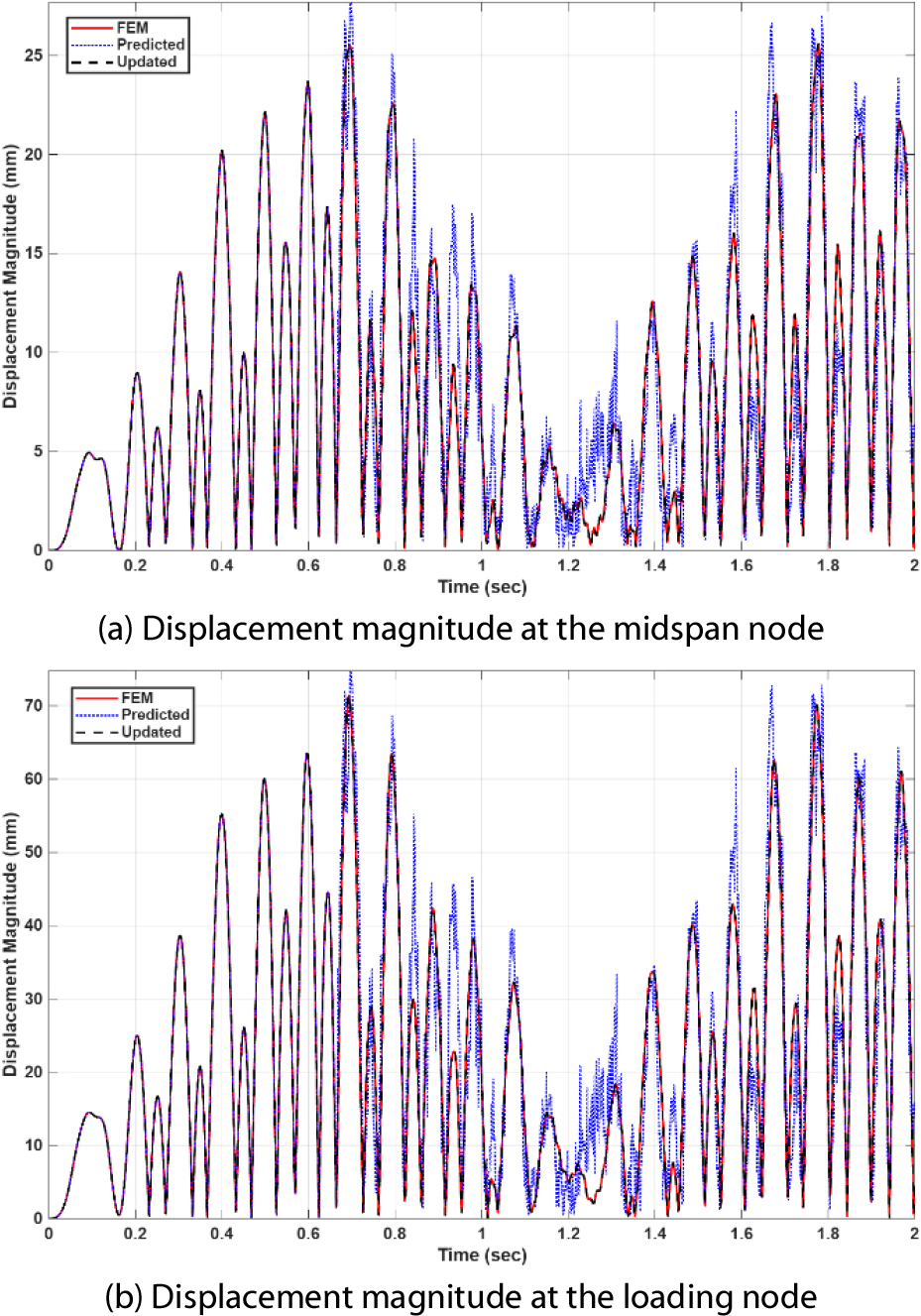
제안된 프레임워크의 보정 정확도를 검증하기 위해 박스형 보의 중단부의 노드와 하중이 가해지는 노드에서의 변위 응답 이력을 비교한 결과는 Fig. 9와 같다. 트랜스포머 모델에 의해 근사된 응답은 예측 구간에서 수치적인 오차가 존재한다. 반면, 제한된 센서 변위 정보를 이용하여 보정한 응답은 기준 응답의 근사 정확도가 크게 개선되는 것으로 나타났다. 제안된 기법의 정량적인 보정 성능을 평가하기 위해, 각 타임 스텝에서의 전체 자유도에 대한 상대 오차 노름을 계산하였다. Fig. 10은 테스트 구간에서의 상대 오차 이력을 나타낸다.
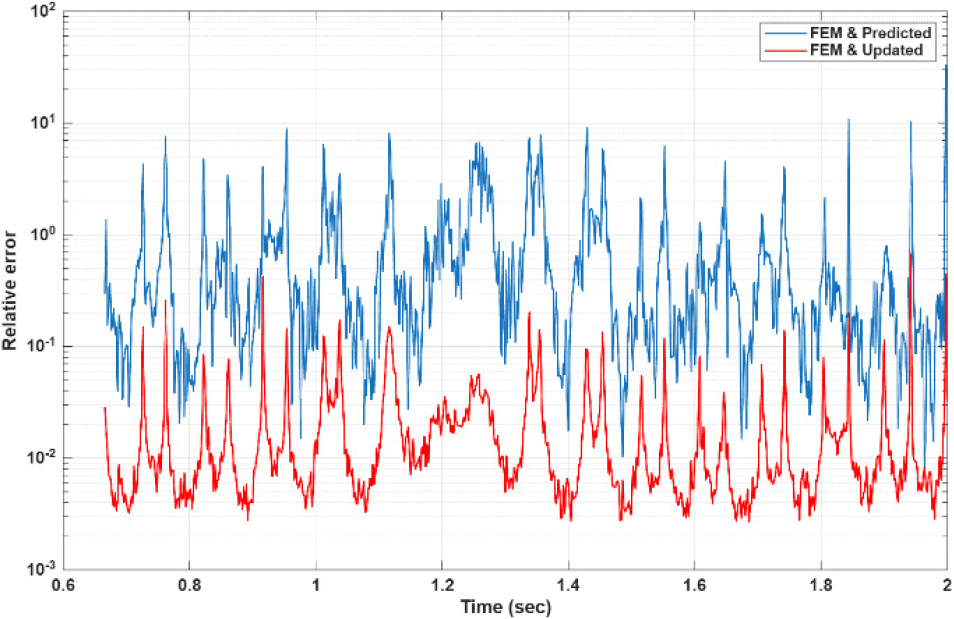
트랜스포머가 근사한 변위 응답을 제안한 방법을 활용하여 보정한 경우 상대 오차가 10-3 이내의 수준으로 유지됨을 확인할 수 있다.
4. 결 론
본 연구에서는 실제 구조물의 운용 환경을 모사하기 위해 고정밀 유한요소해석 결과로부터 추출된 센서 변위 데이터를 활용하여 비선형 구조물의 동적 응답을 업데이트하는 절차를 제안하였다. 수치 예제로써 기하학적 비선형 응답이 나타나는 캔틸레버 보와 국부 비선형 변형이 동반되는 박스형 보를 고려하였다. 두 예제에서 트랜스포머 기반 예측 응답은 기준 응답의 진동 양상은 전반적으로 추종하였으나, 오차가 존재하였다. 예측 응답을 업데이트한 결과, 전체 자유도에 대한 상대 오차 노름이 10-3의 수준으로 크게 감소하였으며, 이를 통해 구조물의 비선형 동적 거동을 정밀하게 보정할 수 있음을 보였다.
향후 연구로는 센서 데이터에 다양한 수치의 잡음을 추가하여 알고리즘의 강건성 평가를 수행하고, 센서 배치 최적화를 통해 소음에 의한 민감도를 최소화함으로써 안정적인 성능을 유지할 수 있는 기법을 구축할 예정이다.
