

1. 서 론
위상 최적설계(Topology Optimization) 기법은 설계자가 주어진 재료를 이용하여 최적의 부재 배치를 찾을 수 있는 방법론이다. 선형 및 비선형 해석분야에서 다양한 위상 최적설계 기법이 개발되어 고체역학, 열전도문제, 고유치문제, 음향문제 등에 널리 사용되어 왔다. 본 연구에서는 연속체 변분방정식(Continuum variational equation)을 풀기 위하여 무요소 기법(Meshfree methods; Lancaster et al., 1981; Belytschko et al., 1996) 중의 하나인 재생 커널 기법(RK; Reproducing kernel method)을 사용하였다. RK 기법(Chen et al., 1997)에서는 지배 방정식을 이산화하기 위하여 전역 기저함수가 사용되었다. 따라서 응답 해석(Response analysis)에서 질점들을 포함시키거나 제거시키기가 용이하다. 더욱이 최적설계 과정 동안 질점들은 해석의 정밀도를 향상시키기 위하여 어디에든 배치될 수 있다.
위상 최적설계 기법은 많은 수의 설계변수를 동반하기 때문에 매우 효율적인 방법으로 성능함수의 설계민감도를 구해야 한다. 애드조인트 변수법(AVM)이 설계변수가 많고 성능함수의 수가 적은 최적설계 문제에 있어 효율적인 방법임이 알려져 있다. 이는 애드조인트 변수법(Haug et al., 1986)에서 설계민감도를 구할 때 선택적인 방법을 취하기 때문인 것으로 파악된다.
Osher(1998)는 평균 곡률을 이용한 운동 문제에서 경계를 쉽게 추적할 수 있도록 개발된 레벨셋 방법(Level set method)을 활용하였다. Setian(2000)은 경계의 해상도에 관한 연구를 수행하였으며 요소가 없는 복잡한 경계를 갖는 선형 탄성-정적 문제(Linear elasto-static problem)을 풀기 위하여 명시적 경계 함유방법(Explicit immersed boundary)을 도입하였다. 또한, 이 논문에서는 물질의 제거와 추가에 대한 기법이 사용되었다. 제거율은 새로운 홀 주변의 응력 분포와 경계 운동의 속도를 결정한다. Allaire(2002)는 레벨셋 방법을 이용하여 형상 최적설계 문제에 접근하였으며 컴플라이언스(Compliance)와 특정 지점의 변위가 목적함수로서 고려되었다. 레벨셋 방법은 최적설계 과정 중에 구멍이 생성될 수 없으며, 초기 위상에 크게 의존하며, 국부적인 최소값으로 수렴하게 된다. Wang(2003)은 암시적 이동경계를 이용한 위상 최적설계의 수치적인 기법을 개발하였다. 최근에는 음향분야에도 레벨셋 기반 최적설계 연구가 확장이 되었다(Kim et al., 2012). 구조 경계를 레벨셋 방법을 이용하여 표현하였으며, 해석영역 내에서 물질은 균질하다고 가정하였고, 최적화 조건을 만족시키기 위하여 영역 내 물질의 분포가 아닌 경계가 변화하게 된다.
2. 무요소법 정식화
선형 탄성 문제에서 식 (1)의 평형 방정식과 식 (2)의 변위 및 식 (3)의 접촉력 경계조건을 고려하자.
 (1)
(1)
 (2)
(2)
 (3)
(3)
변형률 텐서는 식 (4)와 같이 정의되며 변형률과 응력의 관계식은 탄성 모듈러스 텐서(Elastic modulus tensor)를 사용하여 식 (5)와 같이 표현할 수 있다.
 (4)
(4)
 (5)
(5)
시험해(Trial solution)을 위한 공간  와 가상의 변위장(Virtual field)을 위한
와 가상의 변위장(Virtual field)을 위한  는 각각 다음과 같이 정의된다.
는 각각 다음과 같이 정의된다.
 (6)
(6)
 (7)
(7)
변분 방정식은 가상 변위  를 사용하여 식 (8)과 같이 쓸 수 있다.
를 사용하여 식 (8)과 같이 쓸 수 있다.
 (8)
(8)
여기서, 변형에너지와 하중 형식은 각각 다음과 같다.
 (9)
(9)
 (10)
(10)
함수  의 재생 커널 근사는 다음과 같이 쓸 수 있다.
의 재생 커널 근사는 다음과 같이 쓸 수 있다.
 (11)
(11)
여기서, ƒ(s)는 영역에서 s에 해당되는 함수 매개변수이다. 2차원 문제의 커널 함수는 다음과 같이 표현된다.
 (12)
(12)
여기서, “ ”은 컴팩트 서포트(Compact support)의 크기를 결정한다. 완전성(Completeness) 조건을 만족하기 위한 수정 함수(Correction function)는 다음과 같다.
”은 컴팩트 서포트(Compact support)의 크기를 결정한다. 완전성(Completeness) 조건을 만족하기 위한 수정 함수(Correction function)는 다음과 같다.
 (13)
(13)
여기서, 기저벡터는 식 (14)와 같이 선택을 하고
 (14)
(14)
계수 벡터  를 얻기 위하여 다음의 M행렬을 정의한다.
를 얻기 위하여 다음의 M행렬을 정의한다.
 (15)
(15)
여기서,
 (16)
(16)
1차 완전성 조건을 만족시키기 위한 재생 조건을 사용하여
 (17)
(17)
계수 벡터 를 구하고 식 (13)을 활용하면 식 (11)은 다음과 같이 쓸 수 있다.
 (18)
(18)
식 (18)에서 수치적분을 위하여 사다리꼴 공식(Trapezoidal rule)을 적용함으로써, 다음의 2차원 재생 커널 방법을 이용한 기저 함수를 얻을 수 있다.

 (19)
(19)
여기서, NP는 전체 영역에서의 포인트 숫자를 의미하며  는 포인트 I에서의 적분 가중치이다.
는 포인트 I에서의 적분 가중치이다.
3. 레벨셋 방법
Fig. 1에서  는 부드러운 경계 Γ 에 의해 결정되는 열린 영역(Open domain)이며 설계불가 영역 ΩN과 설계가능 영역 ΩD로 구성된다.
는 부드러운 경계 Γ 에 의해 결정되는 열린 영역(Open domain)이며 설계불가 영역 ΩN과 설계가능 영역 ΩD로 구성된다.
 (20)
(20)
시간에 따라 움직이는 경계의 방정식을 유도하기 위하여, ( +1) 차원 함수
+1) 차원 함수  의 제로 레벨셋 함수 Ø를 움직이는 경계로 설정한다.
의 제로 레벨셋 함수 Ø를 움직이는 경계로 설정한다.  는 초기 경계이고 ΩI는 초기 영역이다. τ=0일 때, ΩI에서 정의된 립쉬츠(Lipschitz) 연속의 제로 레벨셋 함수
는 초기 경계이고 ΩI는 초기 영역이다. τ=0일 때, ΩI에서 정의된 립쉬츠(Lipschitz) 연속의 제로 레벨셋 함수  를 다음과 같이 정의한다.
를 다음과 같이 정의한다.
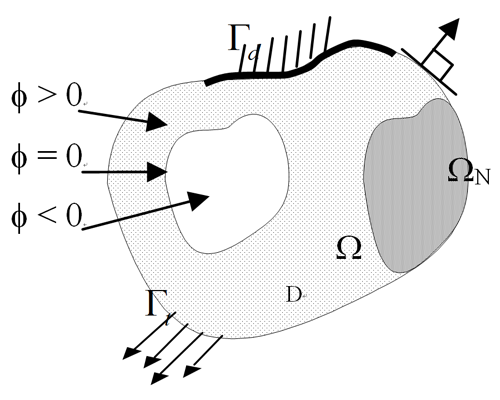
 (21)
(21)
여기서,  는
는  에 해당하는 모든
에 해당하는 모든  지점에서 경계 Γ 까지의 거리이며
지점에서 경계 Γ 까지의 거리이며  와 Ωτ는 각각 시간 에서의 움직이는 경계와 해당하는 영역이다. 경계 Γ 에서 바깥 방향으로의 단위 벡터 n은 레벨셋 함수를 이용하여 다음과 같이 얻을 수 있다.
와 Ωτ는 각각 시간 에서의 움직이는 경계와 해당하는 영역이다. 경계 Γ 에서 바깥 방향으로의 단위 벡터 n은 레벨셋 함수를 이용하여 다음과 같이 얻을 수 있다.
 (22)
(22)
곡률  는 n벡터의 발산을 통하여 얻을 수 있다.
는 n벡터의 발산을 통하여 얻을 수 있다.
 (23)
(23)
레벨셋 방법은 경계를 암시적으로 표현하기 위하여 도입되었으며 임의의 시간에서 제로 함수값  으로부터 3차원 공간에 곡면을 표현할 수 있다.
으로부터 3차원 공간에 곡면을 표현할 수 있다.
 (24)
(24)
여기서,  는 제로 함수값을 포함하는 임의의 값이고 는 곡면 Ø에서의 임의의 좌표이다. 레벨셋 함수를 매개변수 τ에 대하여 전미분(Material derivative)을 취하면 해밀턴-자코비 형태의 방정식(Hamilton-Jacobi type equation)을 얻게 된다.
는 제로 함수값을 포함하는 임의의 값이고 는 곡면 Ø에서의 임의의 좌표이다. 레벨셋 함수를 매개변수 τ에 대하여 전미분(Material derivative)을 취하면 해밀턴-자코비 형태의 방정식(Hamilton-Jacobi type equation)을 얻게 된다.
 (25)
(25)

초기 레벨셋 모델과 τ에 의해 변화된 레벨셋 모델 간의 변환은 다음과 같다.
 (26)
(26)
형상 최적설계에서 설계 속도장은 다음과 같이 정의된다.
 (27)
(27)
 (28)
(28)
식 (28)을 활용하여 식 (25)를 다음과 같이 쓸 수 있다.
 (29)
(29)
여기서,  은 경계에 수직한 속도벡터이며 식 (22)를 이용하면 다음을 얻는다.
은 경계에 수직한 속도벡터이며 식 (22)를 이용하면 다음을 얻는다.
 (30)
(30)
식 (30)을 식 (29)에 대입하고 경계조건을 적용시키면 다음을 얻는다.
 (31)
(31)
주어진 설계 속도장  과 식 (31)의 초기 조건을 활용하여 1차 미분 방정식을 풀면 레벨셋 함수
과 식 (31)의 초기 조건을 활용하여 1차 미분 방정식을 풀면 레벨셋 함수  를 변경할 수 있다. 수치적 안정성을 위하여 다음의 업-윈드 기법(Up-wind scheme)을 사용하였다.
를 변경할 수 있다. 수치적 안정성을 위하여 다음의 업-윈드 기법(Up-wind scheme)을 사용하였다.
 (32)
(32)

여기서,
 (33)
(33)
 (34)
(34)
 ,
,  는
는  에서의 전방 또는 후방 차이 연산자이며
에서의 전방 또는 후방 차이 연산자이며  는 시간 증분을 의미한다.
는 시간 증분을 의미한다.
4. 무요소법 정식화
4.1 형상 설계민감도 해석
본 논문에서 형상 최적설계의 목적은 하중을 받는 구조물의 컴플라이언스를 최소화하는 형상을 찾는 것이다.
 (35)
(35)
 (36)
(36)
여기서,  는 허용 재료량이며 애드조인트 응답 λ를 활용하여 다음과 같은 라그랑지안을 구성할 수 있다.
는 허용 재료량이며 애드조인트 응답 λ를 활용하여 다음과 같은 라그랑지안을 구성할 수 있다.
 (37)
(37)
여기서,
 (38)
(38)
식 (37)에서 V의 방향으로 1차 변분을 취하면 다음을 얻는다.
 (39)
(39)


변위 경계조건에서 속도를 0으로 두면 식 (39)를 초기 영역 에 대해서 다음과 같이 쓸 수 있다.
 (40)
(40)

허용 재료량의 제한조건과 경계변화에 따른 도함수는 다음과 같이 얻을 수 있다.
 (41)
(41)
 (42)
(42)
속도장  는 레벨셋 함수 에 대하여 바깥쪽 수직방향으로 진전하는 속도로 정의된다. 속도장은 허용 재료량 제한 조건을 만족시키면서 컴플라이언스를 감소시키는 방향으로 결정되어야 한다. 제한조건이 있는 최적설계 문제에 대하여 라그랑지안 함수
는 레벨셋 함수 에 대하여 바깥쪽 수직방향으로 진전하는 속도로 정의된다. 속도장은 허용 재료량 제한 조건을 만족시키면서 컴플라이언스를 감소시키는 방향으로 결정되어야 한다. 제한조건이 있는 최적설계 문제에 대하여 라그랑지안 함수  는 다음과 같이 정의할 수 있다.
는 다음과 같이 정의할 수 있다.
 (43)
(43)


여기서,  는 부등식을 등식 제한조건으로 변환하는 여유변수(Slack variable)이며, µ는 라그랑지 승수(Lagrange multiplier)이다. 쿤-터커 최적설계 조건을 적용하면 다음을 얻는다.
는 부등식을 등식 제한조건으로 변환하는 여유변수(Slack variable)이며, µ는 라그랑지 승수(Lagrange multiplier)이다. 쿤-터커 최적설계 조건을 적용하면 다음을 얻는다.
(ⅰ) (44)
(44)

(ⅱ) (45)
(45)
(ⅲ) (46)
(46)
(ⅳ) (47)
(47)
변수  를 다음과 같이 다시 정의하면
를 다음과 같이 다시 정의하면
 (48)
(48)
식 (44)~(47)의 최적설계 조건은 다음과 같이 정리된다.
 (49)
(49)
4.2 속도장의 계산
거리 함수 가 경계에 수직으로 정의되고 수직 설계속도만이 형상 최적설계에 영향을 미치기 때문에 영역 변화는 수직방향의 속도 를 이용하여 다음과 같이 표현된다.
 (50)
(50)
설계속도장을 수직 설계속도 방향으로의 테일러 급수 전개를 하면 라그랑지안 함수는 다음과 같이 표현된다.
 (51)
(51)
여기서, 라그랑지안의 민감도는 다음과 같이 쓸 수 있다.
 (52)
(52)
설계민감도가 감소하는 방향으로 설계속도장을 다음과 같이 설정할 수 있다.
 (53)
(53)
이로부터, 식 (51)은 다음과 같이 쓸 수 있다.
 (54)
(54)
따라서 허용 재료량의 제한조건을 만족시키면서 컴플라이언스를 감소시키는 방향으로의 최적설계가 보장될 수 있다.
4.3 라그랑지 승수의 결정
재료량 제한조건이 활성화(active) 상태 또는 위반된(violated) 상태인지를 결정짓는 라그랑지 승수를 결정하기 위하여 제한조건의 활성화 상태를 생각한다.
 (55)
(55)
식 (55)에 τ에 대하여 미분을 취하고 식 (42)와 (53)을 적용하면 다음을 얻는다.
 (56)
(56)
따라서 라그랑지 승수는 다음과 같이 얻어진다.
 (57)
(57)
최적화 과정 동안에 생성되는 함수 의 급수는 위상 최적화 문제의 감소하는 급수를 나타낸다. 본 방법론은 위상변화를 표현할 수 없을 뿐 아니라 국부 최소값으로 부드럽게 수렴하기 때문에 초기 위상에 의존적이라는 한계점을 가지고 있다.
5. 수치 예제
두 개의 모델에 대한 설계영역과 경계조건 및 하중조건이 각각 Fig. 2와 Fig. 4에 제시되어 있다. 굵은 선은 초기 경계조건  를 나타낸다. 목적함수는 컴플라이언스를 최소화하는 것이며, 제한조건은 초기 부피의 40%이하로 부피를 제한하는 것이다. 영률은 210GPa이고, 포아송비는 0.3이다. 모델의 크기는 길이가 1.8m이고, 넓이가 0.6m이며 두께는 0.01m이다. 유한요소 모델은 3,196개의 요소와 3,325개의 절점으로 이루어져 있다.
를 나타낸다. 목적함수는 컴플라이언스를 최소화하는 것이며, 제한조건은 초기 부피의 40%이하로 부피를 제한하는 것이다. 영률은 210GPa이고, 포아송비는 0.3이다. 모델의 크기는 길이가 1.8m이고, 넓이가 0.6m이며 두께는 0.01m이다. 유한요소 모델은 3,196개의 요소와 3,325개의 절점으로 이루어져 있다.
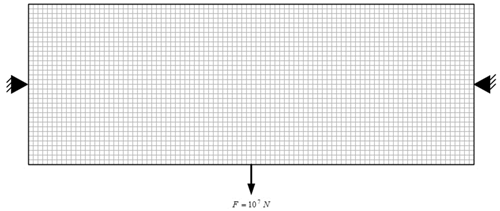
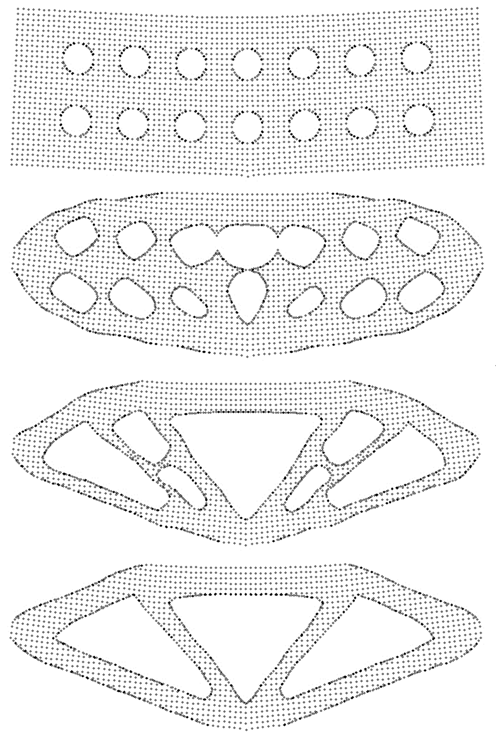
Fig. 2의 모델 A에서는 좌우단의 가운데 부분이 단순지지 되어 있으며, 하단 가운데에 107N의 수직 하중이 가해지고 있다. 이 모델에서 40% 허용재료량 조건 하에서 최소 컴플라이언스를 갖는 구조를 제안된 최적설계 기법을 이용하여 구하면 Fig. 3과 같다.
Fig. 3에서 알 수 있듯이, 최적화 과정 중에 인접한 구멍은 서로 합쳐지며 초기 부피의 40% 이내에서 최적의 형상을 찾아 나간다. 본 방법론은 새로운 구멍을 생성해 내지는 못하기 때문에, 최적의 형상을 얻기 위하여 초기 모델이 충분히 많은 수의 구멍을 가지고 있어야 한다. 무요소법을 사용하였기 때문에 최적화 과정 중에 변화하는 경계에 적응적으로 질점을 분포시킬 수 있음을 알 수 있다. Fig. 4에서는 동일한 모델에 대해서 무요소법이 아닌 밀도법 기반의 위상 최적설계를 유한요소 기반으로 수행한 결과를 보여준다. 최적설계 결과가 앞서 얻은 결과와 거의 유사함을 알 수 있다.
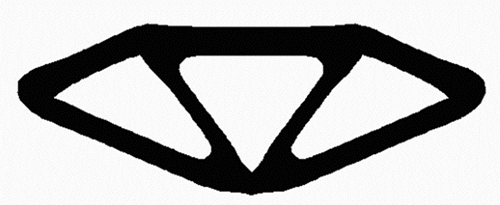
다른 예제로서 Fig. 5의 모델 B를 고려하자. 모델 B에서 밑면에 106N의 하중이 여러 지점에 걸쳐 가해지고 있으며 밑면의 양끝 지점에서 단순 지지되고 있다.
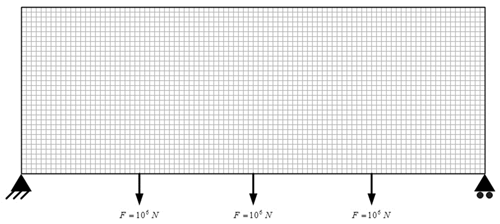
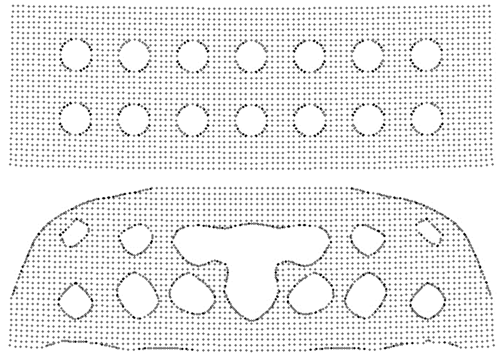
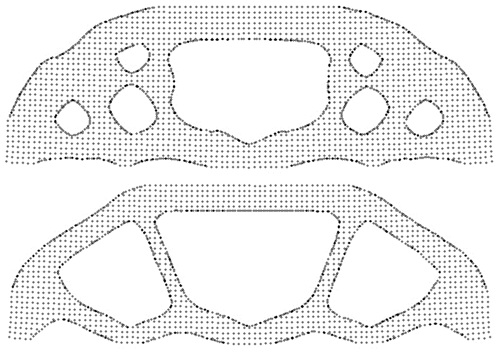
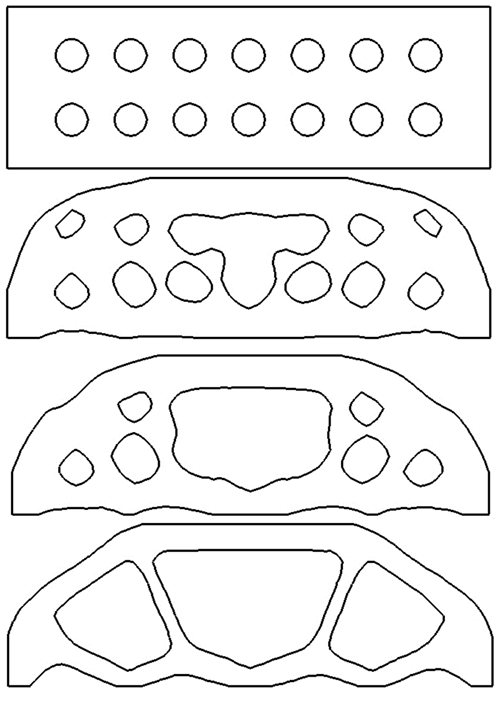
Fig. 6은 모델 B의 최적설계 결과이다. 초기 모델이 형상 속도로부터 최적의 형상을 향해 변화됨을 알 수 있다.
최적설계가 진행되는 동안 해석에 필요한 질점들이 레벨셋 함수값에 따라 분포되어 있다. 대부분의 질점들은 영역 내부에 균등하게 분포되어 있으며 경계 주변에 좀 더 세밀하게 분포되어 무요소법 해석 결과의 정확도를 향상시킨다. Fig. 7에서는 Fig. 6의 최적설계 과정 동안 각각에 해당하는 0의 레벨셋을 나타내고 있다.
6. 결 론
레벨셋 방법과 무요소법을 활용한 선형탄성 구조물의 형상 최적설계 기법을 개발하였다. 구조물의 경계를 암시적으로 표현하기 위한 레벨셋 방법론을 활용하여 레벨셋 기반 변분 방정식을 구성하였으며 재생 커널 방법을 이용하여 연속체 변분 방정식의 해를 구하였다. 암시적으로 움직이는 경계가 사용되었기 때문에 형상의 변화를 표현하기가 용이하며 무요소법에서의 점들은 최적설계 과정 동안 정확한 응답이 필요한 지점에 임의로 더해지거나 제거될 수 있다. 또한 무요소법을 사용하였기 때문에 최적설계 과정 동안의 형상변화로 인한 재 매개화가 필요하지 않다. 설계변수가 많은 위상 최적설계 기법에서의 설계민감도는 연속체 기반의 애드조인트 기법을 이용하여 효율적으로 계산하였다. 최적화 과정에서 해밀턴-자코비 방정식을 풀기 위한 설계 속도장은 라그랑지안의 쿤-터커 최적설계 조건을 통해서 얻을 수 있다. 수치적 예제를 통하여 개발된 방법론이 정확한 최적설계 결과를 얻을 수 있음을 확인하였다. 또한 본 방법론은 최적화 과정에서 새로운 구멍을 생성할 수 없기 때문에 충분한 숫자의 초기 구멍을 사용하는 것이 중요하다.
