

1. Introduction
2. Methodology
2.1 Unit-Cell Geometry
2.2 Constitutive modeling of SMA-driven actuation
2.3 Actuation of P-loop Unit Cell
3. Results and Discussion
4. Conclusion
1. Introduction
Knitted soft actuators are a distinctive class of morphing structures in which macroscopic deformation is governed not only by the constitutive response of the loop but also by the kinematics of an interconnected loop network (Elahi et al., 2024; Kamalakannan et al., 2019). Unlike woven fabrics, where yarns are predominantly straight, and deformations are often dominated by shear and yarn sliding, knitted textiles contain many interdependent loops whose internal void space allows substantial changes in loop curvature, loop opening, and loop rotation. Consequently, knitted architecture can exhibit large, reversible deformation and pattern-dependent anisotropy, which is attractive for soft robotics, wearable systems, adaptive garments, and compliant mechanisms (Barrientos et al., 2025; Boyraz et al., 2018; Lee and Park, 2024; Shin et al., 2023, 2024).
When SMAs are integrated into knitted yarns, actuation can be triggered by temperature-induced martensite austenite phase transformation (Han et al., 2025; Lai et al., 2019). Previous researchers utilized a smart-yarn configuration, in which a NiTi SMA core is wrapped with polymer fibers (e.g., polyester) to provide electrical insulation at loop-to-loop contact points and to increase frictional stability (Han and Ahn, 2017; Kim et al., 2021). Under heating, the SMA transforms toward austenite and recovers its pre-trained configuration, which produces an effective axial contraction (or recovery strain) along the yarn direction. Because the SMA core is embedded within a looped geometry, this axial recovery does not translate into purely axial shortening of the fabric; instead, it drives loop tightening and geometric reconfiguration. The resulting deformation is therefore amplified and shaped by the knit topology: local contraction generates distributed bending, out-of-plane deflection, and pattern-dependent shape morphing.
Accurate prediction of SMA-driven knitted actuation remains challenging for three fundamental reasons. First, the SMA response is inherently nonlinear and thermomechanically coupled: transformation progression depends on temperature and stress state, and the transformation strain contributes directly to the global deformation (Li and Li, 2023). Second, knitted structures display strong geometric nonlinearity (Katoch and Ueda, 2015). Even if the yarn material remains in a small strain, the loops experience large rotations and significant curvature changes, producing a highly nonlinear structural response. Third, the interactions among neighboring loops (course-wale coupling) and the possibility of yarn contact/self-contact introduce additional complexity and sensitivity to modeling choices and boundary conditions. These aspects can make full-scale simulation of realistic knitted actuators computationally expensive and difficult to parameterize.
A practical strategy is to adopt a unit-cell model. A representative unit cell retains the essential loop mechanics and inter-loop coupling while remaining computationally tractable for nonlinear analysis and parametric exploration. Such a methodology is valuable for comparing knit patterns and for building intuition about how loop geometry and constraints control the macroscopic actuation mode (Elahi et al., 2025). In the present work, the numerical investigation is centered on the plain-pattern P-loop, which provides a baseline structure before extending to more complex patterns that combine knit and purl loops. The unit cell is defined as a 3 × 3 array of P-loops to capture local coupling effects without the expense of modeling an entire textile patch.
The purpose of this paper is to establish a constitutive-structural modeling methodology for SMA-driven knitted soft actuators under large deformation in ANSYS (2025 R2). The numerical actuation is represented by a prescribed heating load from 25°C to 90°C, and the SMA phase transformation response is captured using the built-in SMA material capability. The structural problem is solved under large-deformation kinematics to capture out-of-plane deformation. Minimal constraints are applied to suppress rigid-body modes while allowing maximum deformation. In the current model, loop contact and self-contact are neglected to isolate the primary coupling between SMA transformation strain and loop reconfiguration. This deliberate scope yields a clean first-order understanding of the deformation mechanism and provides a foundation for future improvements such as contact inclusion, heating-cooling hysteresis, and electro-thermal coupling (current/voltage to temperature evolution).
2. Methodology
This section describes the details of the knitted P-loop soft actuator unit cell geometry and the proposed numerical methodology using ANSYS 2025.
2.1 Unit-Cell Geometry
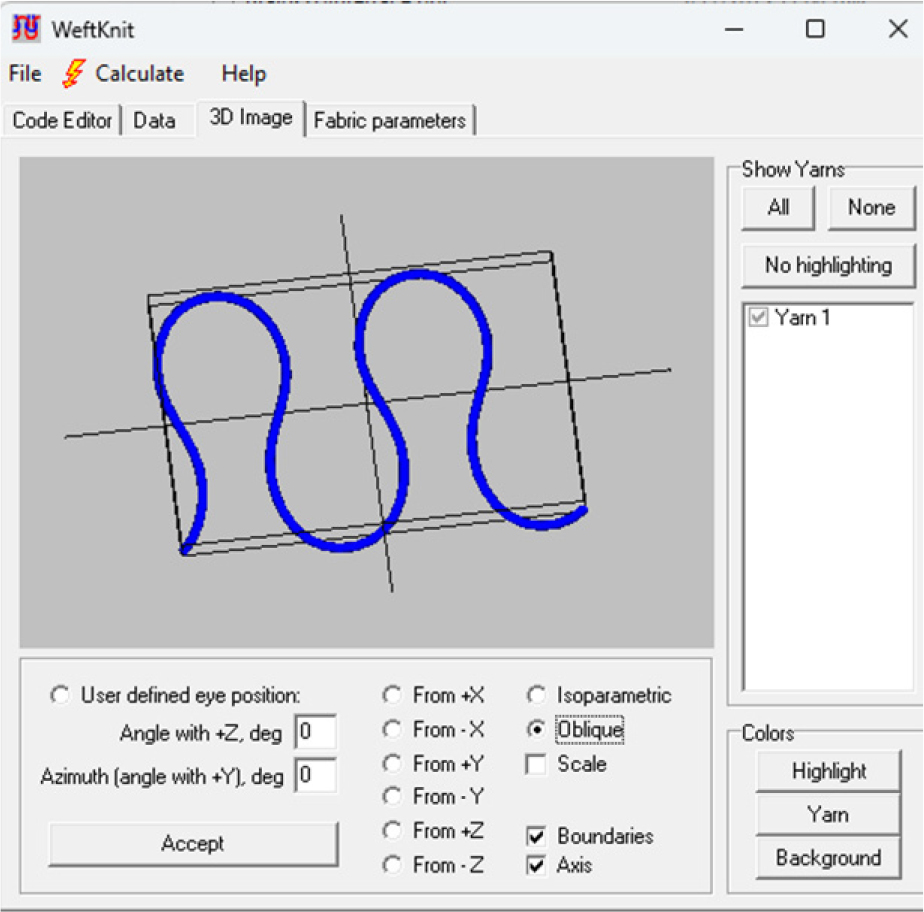
The knitted soft actuator unit cell was based on a plain P-loop knit pattern. To represent loop interdependence in both the course and wale directions, a 3 × 3 loop arrangement was selected. This unit cell is large enough to capture the constraint imposed by neighboring loops and the emergence of a collective deformation mode, while keeping the model suitable for nonlinear analysis. The knitted unit cell was generated in WeftKnit using the actual geometric dimensions of the loop constituents (e.g., loop height/width and yarn path geometry as defined in the knitting model) as shown in Fig. 1. The resulting three-dimensional looped yarn path was exported and imported into ANSYS for nonlinear analysis. This workflow ensured that the numerical model preserved the true unit-cell geometry and curvature distribution of the P-loop architecture rather than relying on an idealized or normalized loop description.
For the finite element discretization, the looped path was meshed along its length to resolve curvature changes and large rotations associated with loop tightening and out-of-plane morphing. Large-deformation kinematics were enabled in the structural analysis to capture the strongly nonlinear response of the knitted topology. Contact and self-contact between yarn segments were not included in the present baseline model; consequently, the discretization was selected to maintain numerical stability under large deformation while capturing the dominant bending-driven deformation mode of the unit cell.
The geometric parameters used to generate the P-loop unit cell in WeftKnit are shown in Table 1.
Table 1.
Illustrates the geometric properties used to create the P-loop unit cell
| Parameter | Symbol | Value (mm) |
| Stitch width | A | 4.0 |
| Rib width | Arib | 1.00 |
| Stitch height | B | 3.50 |
| Leg opening | K | 1.40 |
| Loop width | L | 2.50 |
| Halfway fraction | Y | 1.70 |
| Diameter | D | 0.200 |
2.2 Constitutive modeling of SMA-driven actuation
The actuation originates from temperature-driven martensite-austenite phase transformation in the SMA component. In experimental smart-yarn systems, a NiTi SMA core (commonly near 55wt% Ni and 45wt% Ti) is wrapped by polymer fibers. The wrapping layer plays two physical roles: (i) it electrically insulates yarn contact points to reduce short-circuit risk, and (ii) it increases friction, supporting stable looping and repeatable morphing. In the present numerical work, the deformation mechanism is modeled at the structural level through the SMA constitutive response under a prescribed thermal input.
ANSYS Mechanical (2025 R2) provides an SMA material capability that can represent transformation behavior driven by temperature and stress. In such a formulation, the total strain in the SMA component is conceptually expressed as given in Eq. (1)
where is the elastic strain, is the thermal expansion strain, and is the transformation strain associated with the phase transformation. The transformation strain evolves with the martensite/austenite fraction and is responsible for the recovery-type contraction that drives actuation.
2.3 Actuation of P-loop Unit Cell
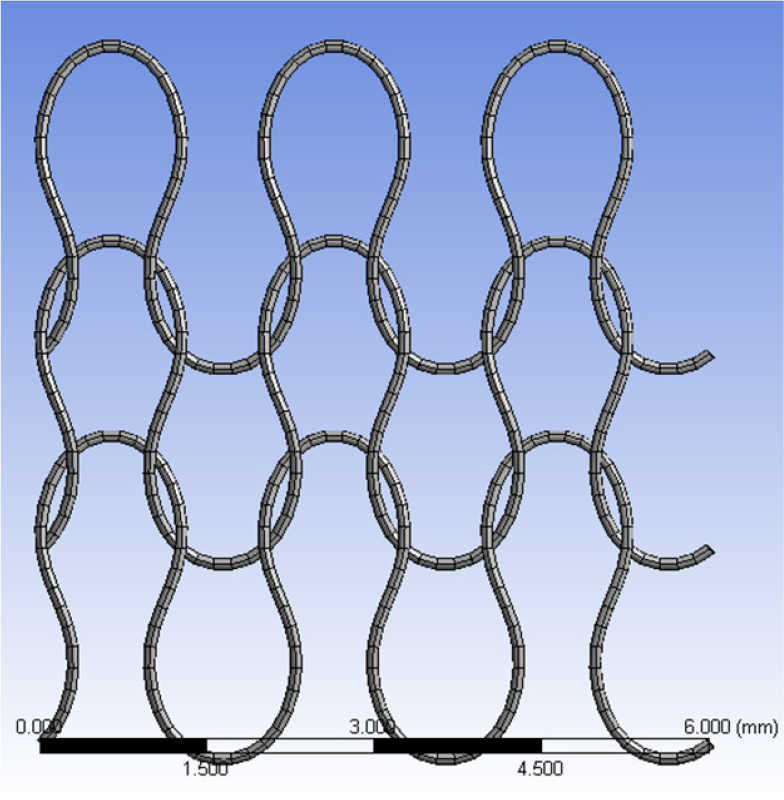
The thermomechanical response of the pre-stretched P-loop unit cell was evaluated by applying an initial temperature of 25°C and tracking the resulting deformation during heating. Fig. 2 shows the unit-cell geometry modeled with a circular cross-section of 0.2mm diameter. At the initial (ambient) temperature, the SMA wire was assumed to be in a fully martensitic state and was assigned an initial pre-stretch corresponding to a 1N axial pretension. Boundary conditions were selected to provide maximum degrees of freedom, while applying only the minimum constraints required to prevent rigid-body motion. The entire loop geometry was initialized at 25°C, and the temperature then increased to 90°C. The out-of-plane displacement of the unit cell was computed as a function of temperature. To capture the pronounced loop reconfiguration, the analysis was performed with large-deformation effects enabled (geometric nonlinearity active).
3. Results and Discussion
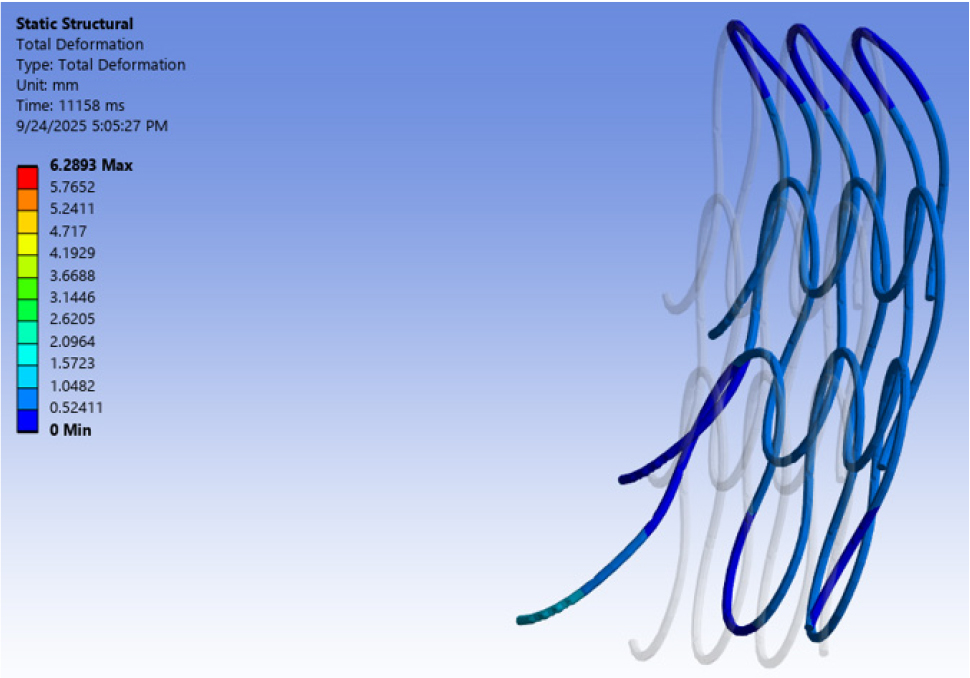
Fig. 3 shows the predicted large-deformation response of the 3 × 3 P-loop unit cell under thermomechanical loading, reported as the total deformation field. To isolate the bending-dominated actuation mechanism, only the upper three loops were assigned the pre-strain (pretension), while the remaining loops primarily responded through geometric coupling to the activated region. This selective activation produced a clear out-of-plane bending mode, where the pre-strained loops tightened and rotated, and the deformation propagated through the adjacent loop network via loop-loop connectivity. The deformation contour indicates a non-uniform displacement distribution, with the maximum total deformation reaching ≈ 6.289mm, while other regions remained at substantially lower displacement levels. The overlaid undeformed/deformed configurations highlight that the unit cell response is governed by loop reconfiguration (curvature change and loop tightening) rather than uniform axial shortening, consistent with the expected kinematics of weft-knitted architectures under SMA recovery strain.
From a computational standpoint, the model is intrinsically demanding because the characteristic dimensions are multi-scale: the unit cell is defined at the millimeter level, whereas the yarn/loop diameter is only 0.2mm. Capturing large rotations and curvature changes in such a slender loop geometry requires sufficiently fine discretization and a nonlinear large-deformation solution, making the analysis computationally expensive. In the present configuration, a single simulation required approximately 2-3hours to complete.
Future work will reduce the computational cost by introducing symmetry in the unit-cell formulation (where applicable), thereby decreasing the number of degrees of freedom while retaining the dominant bending response. This will enable faster parametric exploration of knit patterns and activation strategies within the same thermomechanical modeling framework.
4. Conclusion
This study presented a constitutive-structural numerical methodology to analyze the large-deformation response of an SMA-driven knitted soft actuator unit cell, with an initial focus on the plain-pattern P-loop. A 3 × 3 unit cell was generated in WeftKnit using geometric parameters extracted from the actual actuator sheet and imported into ANSYS for nonlinear thermomechanical analysis. The SMA response was modeled using the built-in SMA capability, with the unit cell initialized at 25°C and heated to 90°C to trigger martensite-to-austenite transformation and the associated recovery-driven deformation. To investigate bending-dominated actuation, pre-strain was applied selectively to the upper three loops, which produced a pronounced out-of-plane bending mode and distributed deformation across the interconnected loop network; the maximum total deformation reached approximately 6.289mm. The analysis was computationally demanding due to the slender loop diameter (0.2mm) relative to the millimeter-scale unit-cell dimensions and the requirement to resolve large rotations under geometric nonlinearity. Future work will incorporate symmetry to reduce computational cost and enable efficient parametric studies across different knit patterns and activation strategies, followed by higher-fidelity modeling that includes contact/self-contact and full heating-cooling cycles for improved physical realism and validation.
