

1. 서 론
기계시스템의 운용에서 설비 결함을 진단하고 고장발생 가능성이 있을 때에만 정비를 수행하는 상태기반정비(condition based maintenance, CBM)가 최근 많은 주목을 받고 있다. 이는 시스템의 유지보수비용 및 다운 타임 감소를 통해 운용 비용 감소와 이익증대를 실현하여 준다. 결함진단이 적용되어 큰 효과를 기대할 수 있는 분야는 유지보수에 높은 비용이 필요한 시스템이며 대표적으로 고속철도와 풍력발전용 터빈의 기어박스를 꼽을 수 있다. 기어박스는 기계시스템에서 회전 동력을 전달하기 위해 기본적으로 사용되는 요소이므로 이에 대해 여러 센서 신호를 통해 결함을 감지하고 진단하려는 연구가 활발하다. 기어결함에는 표면 일부의 비교적 커다란 부분이 떨어져 나가 기어 맞물림이 일어날 때 진동을 발생시키는 박리 (spall)와 반복 굽힘응력으로 인해 피로 균열이 표면의 수직 방향으로 성장하는 균열 두 가지가 있다. 이중에서 균열은 한번 발생하면 급격하게 이의 파손(fracture, breakage)으로 이어 지고, 그 결과 기어 의 연쇄적 파손 및 기어박스 전반의 손상을 유발하므로 특히 중요한 결함요소로 다루어야 한다. 따라서 본 연구에서는 단순히 기어의 결함유무를 판단하는 것 외에 박리와 균열을 구분하기 위한 연구를 수행하였다. 기어결함진단에 있어 기존 연구는 크게 전달 오차를 이용한 연구와 진동 신호를 이용한연구로구분된다. 전달오차(transmission error, TE)는 기어가 서로 맞물려 회전할 때 제작 오차나 하중에 의한 변형 등의 이유로 발생하는 실제와 이상적 회전각 사이의 오차를 뜻 한다. 이러한 전달오차는 기어박스의 진동을 유발하고, 그것이 와인 소음을 발생시키는 부정적 요소이기 때문에, 과거에는 주로 이를 감소시키기 위한 연구를 수행하였다. 기어 이의 형상 변화는 기어 맞물림강성(gear mesh stiffness, GMS)을변화 시키고 이것이 전달오차에 변화를 일으키기 때문에 이의 형상 변화를 전달오차를 통해 분석하는 연구 또한 활발하게 진행되 었다. Milliren(2011)은 제작과정의편차에의한 기어의 index error가 GMS의 변화 관점에서 전달오차에 미치는 영향을 연구하였고이의변화를시간영역과주파수영역에서관찰하였다. 같은 관점으로 기어결함에 따른 GMS 변화를 전달오차의 변화를 통해 확인하고자 한 LI(2002)의 연구에서는 전달오차를 시뮬 레이션과 실험을 통해 구하였다. 이를 통해 기어의 이뿌리 균열로 인한 GMS 감소를 확인하였고 역으로 균열의 크기를 예측하였다. Endo(2009)는 유한요소해석을 통해 얻은 잔류 전달오차(residual transmission error, RTE)에서 균열과 박리의특징을확인하였고이를바탕으로동적차등방법(dynamic differential method)를 제시하였다. Park(2015)은 균열과 박리결함에 따른 GMS 변화의 차이를 전달오차의 피크-투- 피크 값을 이용하여확인하였고이를통해두 결함을구분하고자 하였다.
한편, 기어박스의 진동신호를 통해 기어결함을 진단하고자한 연구 중에는 경험적 모드 분해법(empirical mode decomposition, EMD)을 이용한 사례가 있었다. EMD를 활용한 연구들은 대부분 여러 신호가 혼재되어 있는 진동신호에서 모드를 분리하여 내재 모드 함수(intrinsic mode function, IMF) 들을 만들어내고 그 중 결함 신호를 잘 나타내는 IMF 선정을 통해 결함을 진단하고자 하였다. Loutridis(2004)는 균열의 크기별 진동신호를 획득하고 특정 IMF의 에너지를 통해 균열 결함의 크기를 추정할 수 있는 함수를 완성하였다. Shen (2004)은 진동신호의 시간영역과 주파수영역 특징신호를 정리 하고 IMF에서 특징신호를 추출한 후 다중 transductive 서포트 벡터 머신(multi-class transductive support vector machine, TSVM)을 적용하여 정상상태와 세 가지 결함모드를 분류하는 결과를 만들었다.
기어 축으로부터 측정되는 전달오차는 기존의 진동 신호 보다 노이즈의 영향이 적고 결함의 물리적 현상분석에 따른 신호 변화의 유추가 가능하다는 장점이 있다. 그러나 기존의 연구들은 단지 전달오차를 통해 결함 유무만을 식별하거나 단일 결함에 대한 고장 정도를 파악하는 데에 그쳤다. 또한 진동신호를 통한 결함진단 및 결함종류의 식별 시도가 있었지만 이는 여러 진동 요인을 한 가지 신호로 파악하는 진동신호의 특성 때문에 고장 물리 없이 데이터에 의존한 연구였다. 따라서 본 연구는 이러한 기존 연구의 한계를 보완하기 위해 유한요소해석을 통해 전달 오차의 결함특성을 파악하고 이를 바탕으로 결함을 식별하는 기법을 제시, 실제 실험을 통해 검증하였다.
2. 전달오차(transmissione error)의 개념
본래 기어는 피동기어와 구동기어의 접촉을 통해 회전력을 전달하는 기계요소이다. 하지만 실제 기어는 완전한 강체가 아니므로 GMS에 의해 맞물려 돌아갈 때 이빨의 변형이 발생 하며 이로 인해 이론적으로 기대하는 회전과의 차이를 발생 시키고 이를 전달오차(transmission error, TE)라 한다.(1)(2)
기어에 결함이 발생하게 되면 GMS가 작아지게 되고 기어 강성과 기어 전달오차 간의 관계로 인해 전달오차에도 변화가 발생한다. 즉 정상 대비 결함 기어에서는 전달오차에 변화가 발생하므로 본 연구에서는 이것을 결함진단 신호로 선정하였다.
3. 유한요소해석
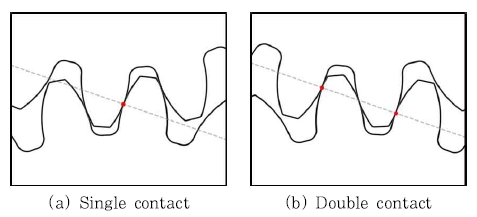
결함에 따른 전달오차의 변화를 실험을 통해 실제로 획득 하기에 앞서 유한요소해석을 통해 결함종류에 따른 전달오차의 경향을파악해보고자하였다. 이를위해상용소프트웨어ANSYS 를활용하였고 모델링 과정은 다음과 같다. 대상으로 하는 기어 쌍은 모듈 4mm, 피치 지름 140 및 280mm 이며, 이들의 인접 이빨에 대한 인벌루트 모델을 생성, 두 기어를 맞물리게 배치 하였고 접촉을 통해 토크를 전달하는 해석을 수행하였다. 이러한 해석을 0.1도(deg) 단위로 회전시키면서 반복하였고 기어의 세 피치에 해당하는 각도 범위에서 전달오차를 얻었다. 결함을 넣지 않은 모델의 해석을 통해 정상 기어의 전달오차를 구하고 Fig. 1(a), (b)와 같은 박리와 균열을 추가한 모델에 대해 동일 하게 전달오차를 구하였으며, 이를 Fig. 1(c), (d)에 도시 하였다. 여기서 정상기어의 전달오차는 점선으로 표시하였다. 한편기어쌍은Fig. 2에서보듯이일반적으로맞물림회전중에 이와 이의 접촉이 한 개와 두 개가 번갈아 가며 발생하며, 이로 인해 전달오차는 높은 GMS와 낮은 GMS를 겪으면서 Fig. 1과 같이 높낮이가 반복된다. 박리의 경우는 Fig. 1(c)에서 보듯이 단일 접촉 시 결함과의 접촉으로 인하여 피크 값이 증가함과 동시에 전달오차 파형의 위상이 이동한 것을 확인할 수 있다. 반면 균열의 경우는 Fig. 1(d)에서 보듯이 위상의 이동은 없었다. 둘의 피크 차이는 실제로 크지 않지만, 정상상태와의 전달오차 차이를 단순이 빼주는 형태로 계산한 잔류 전달오차 (residaul transmission error, RTE)를 관찰하면 Fig. 1(e), (f)에서 보듯이 그 차이가 확연히 드러난다. 박리의 RTE는 전달오차의 위상 이동이 반영되어 결함 신호가 크게 나타나는 반면, 균열의 전달오차는 위상 변화가 없어서 RTE 에서 결함신호가 상대적으로 작게 나타난다. 또한 RTE의 전체적 형태를 봤을 때는 균열결함은 비대칭한 형태의 뾰족한 첨점을 갖는 특징이 있다. 본 연구에서는 두 결함의 이러한 전달오차 신호상의 차이를 신호처리 후의 결과를 통해 확인 하고자 하였다.

4. 전달오차의 신호처리
4.1. 신호처리를 통한 RTE 획득
기어의 전달오차는 이론적으로 한 회전 중에 기어의 이가 접촉을 반복하면서 동일한 패턴을 반복해야 한다. 그러나 실제 조건에서는 제작 및 조립오차 등으로 인해 한 회전 중에 Fig. 3과 같이 저주파의 파형이 함께 발생한다. 유한요소해석 결과를 가지고 이와 같은 조건을 만들기 위해 이러한 저주파를 추가 하고 여기에 박리와 균열 결함신호를 삽입(Fig. 3(a), (d)의 원 부분 참조)하여 시뮬레이션 데이터 Fig. 3(a), (d)를 각각 생성하였다. 시뮬레이션 신호는 피동기어 기준 60rpm조건 으로 생성하였다. 결과적으로 그림에서 보듯이 신호는 기어 맞물림 주파수(gear mesh frequency, GMF)에 해당하는 신호의 반복, 저주파 신호, 그리고 특정 이빨에 존재하는 결함 신호로 구성된다. 이로부터 RTE를 구하기 위해 결함 전달 오차에서 정상 전달오차를 빼주는 대신, 실제 실험에서와 같은 신호 필터링 기법을 이용하였는데, 첫째 스텝은 전달오차에서 60rpm 조건에서 1초에 35번의 기어 맞물림에 의해 발생하는 35Hz의 GMF와 그 하모닉을 노치필터를 이용하여 제거하는 것으로 그 결과 Fig. 3(b), (e) 를 얻었다. 다음 스텝은 제거 된 신호에서 10Hz 이하의 저주파 파형을 제거하기 위하여 하이패스 필터를 적용하는 것이며, 그 결과 Fig. 3(c), (f)와 같은 RTE를 각각 획득하였다. 결함 신호의 유한요소 해석 결과와 신호처리 결과의 RTE를 Fig. 1(e), (f)와 Fig. 4(e), (f)를 통해 확대 비교해 볼 수 있다. 여기서 같은 형상의 결함 신호가 구해지지는 않았지만 이는 하이패스 필터로 인한 신호 왜곡 때문인 것으로 필터 이전인 Fig. 4(c), (d)를 보면 유한 요소해석결과와 유사한 형태임을 확인 할 수 있다. 또한 highpass 하이패스 필터 이 후 다른 형상의 결함신호에서도 박리의 경우는 신호가 비교적 크게 남아있고 균열의 경우는 비교적 작은 결함 신호가 남아 있지만 급격하게 떨어지는 부분으로 인한 첨점을 갖는 특징이 존재한다는 공통점을 관찰할 수 있다.


4.2. Ensemble empirical mode decomposition (EEMD)
두 가지 결함의 RTE 특징 차이를 분석한 결과, 박리는 큰 신호크기, 균열은첨점으로정리할수있다. 이러한신호의특징을 구별하기 위해 앙상블 경험적 모드 분해법(ensemble empirical mode decomposition, EEMD)을 적용(Wu, et al., 2009) 하였는데, 이는 여러 가지 모드가 혼재 된 신호에서 모드를 분리하는 EMD 기법에서 보다 개선된 기법이다.
EEMD를 설명하기에 앞서 EMD에 대해서 설명하자면 다음과 같다. EMD는 비선형성의 여러 모드가 혼재된 time series 데이터를 각 모드를 포함하는 내재 모드 함수(intrinsic mode function, IMF)이라 불리는 진동함수로 유한하게 분해하는 기법이다. IMF는 두 가지 조건을 만족하는 함수로 정의되는데 첫째 조건은 신호의 극값의 수와 부호 변환점의 수가 같거나 하나의 차이만 존재하는 것이고 두 번째 조건은 함수의 극댓값으로 이루어진 포락선와 극소값으로 이루어진 포락선의 평균값이 항상 0이어야 한다는 것이다. 이러한 IMF는 다음과 같은 과정에 의해 원신호에서 부터 만들어지고 분리된다. 원신호가 있을 때 신호의 모든 극대값을 3차 스플 라인으로 잇는 극대값 포락선를 구성하고 모든 극소값을 3차 스플라인으로 잇는 극소값 포락선를 구성하여 두 개의 평균을 구한다.(3)
구해진 m1 (t)를 원 신호 x(t)에서 빼줌으로써 첫 번째 ht를 획득한다.(4)
만약 h1 (t)가 IMF의 조건을 만족한다면 첫 번째 IMF가 되는 것이고 그렇지 않다면 h1 (t)가 IMF조건이 만족될 때 까지 시프팅(sifting) 과정을 반복한다. 반복되는 시프팅 과정은 앞선 과정과 같이 IMF 조건을 만족하지 못한 h1 (t)를 원 신호처럼 두고 h1 (t)의 극대값으로 구성된 극대값 포락선과 극소값으로 구성된 극소값 포락선를 통해 구한 m11 (t)을 빼주는 것을 말한다.(5)
sifting 과정을 통해 IMF 조건을 만족하게 된 h1 (t)는 1(t)로 표시한다. 원 신호 x(t)에서 첫 번째 IMF인 C1 (t)를 빼주게 되면 그 결과를 첫 번째 residue라고 하고 r1 (t)로 표시한다.(6)
r1 (t)에서 다시 sifting 과정을 거쳐 두 번째 IMF C2를 얻게 되고 이후 다시 r2 (t)에서 앞선 과정의 반복을 통해N번째 IMF까지 얻는다. sifting 과정은 마지막 residue인 (t)가 단조함수가 될 때 마치게 된다. 따라서 원 신호 x(t)는 다음 식으로 표현할 수 있다.(7)
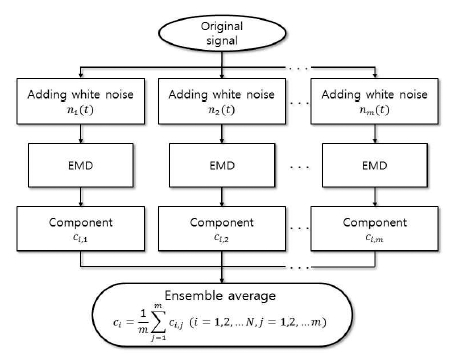
하지만 EMD기법에는 단점이 존재하는데 신호에 임팩트 신호와 같은 연속적이지 않은 신호가 들어가게 되면 모드가 구분되지 않고 서로 각기 다른 IMF에 신호의 특징이 혼재 되는 모드 믹싱 현상이 발생한다는 것이다. EEMD는 이를 개선하기 위해 전 주파수 대역을 포함하는 백색 노이즈를 추가함으로써 신호에 없었던 여러 모드의 극값을 추가하게 되어 적절한 포락 선형성이 가능해지고 이로 인하여 sifting 과정을 진행할 때 생기는 모드 믹싱을 방지하게 된다. 함수에서 노이즈를 추가 하고 시프팅 과정을 여러 차례 반복한 결과들을 앙상블 평균을 취하여 EEMD의 IMF를 구한다. EEMD 알고리즘은 Fig. 5와 같으며, 박리와 균열 등 임펄스 형태로 나타나는 결함 신호에서 발생하는 모드 믹싱 현상을 피하기 위해 EEMD를 적용하였다. 그 결과 RTE에서의 박리신호의 특징인 큰 진폭는 상대적으로 저주파영역의 모드에 큰 영향을 주는 반면, 균열신호의 첨점은 상대적으로 고주파 영역의 모드에 영향을 주는 것이 확인되 었다.
박리와 균열 RTE를 원신호로 EEMD 결과인 IMF를 살펴 보면 예상대로 여러 IMF에 걸쳐 결함 신호의 영향이 나타나며, 그 중 C1~C5에서 큰 차이가 확인되고 있다(Fig. 6, 7 참조). 박리와 균열의 C1~C4 결과를 살펴보면 같은 스케일로 비교 하였을 때 균열은 C1에서, 박리는 C2~C4에서 피크 신호가 상대적으로 더 크다는 것을 확인할 수 있다. 큰 진폭은 신호의 변화가 크지만 비교적 서서히 일어나는 저주파로 구성되고 첨점은 짧은 시간 내에 큰 변화로 인한 고주파로 구성되어 IMF에서는 저주파모드와 고주파모드로 분리가 된 것으로 확인된다.


5. 전달오차 측정 실험
5.1. 실험구성
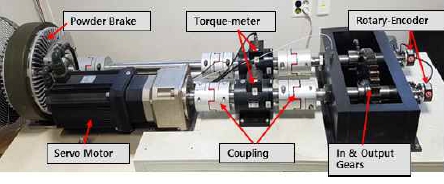
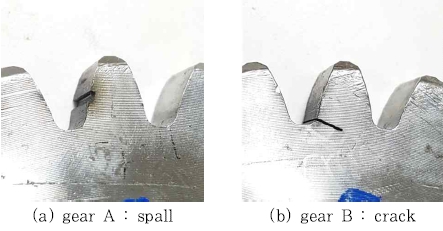
실제의 전달오차를 측정하기 위한 Fig. 8과 같은 실험장치를 꾸렸고 이는 서보모터, 기어박스, 베어링, 기어 축, 스퍼기어 한 쌍, 토크미터, 파우더 브레이크, 각 구성품을 잇는 플랙서블 커플링 그리고 회전량을 측정할 로터리 엔코더로 구성되어 있다. 각 구성요소의 제원은 Table 1과 같다. 서보모터는 기어박스의 구동기어를 회전시키고 다른 한쪽의 피동기어와 연결된 파우더 브레이크가 회전에 제동을 거는 형식으로 기어 회전에 토크 하중을 부여한다. 구동과 피동기어 축 끝단의 엔코더를 통해 각 축의 회전량을 측정하고 이를 통해 전달 오차를 계산한다. 실험장치에 설치되는 기어는 모듈 4, 기어비 2:1, 피치원지름 280mm 140mm 기어 두 개로 구성되어 있고 기어이빨의 개수는 각 70개 35개이다. 두 개의 피동기어를 준비하여 gear A, gear B로 명명하고 각 기어에 박리 및 균열을 부여하여 정상상태 및 결함상태의 전달오차를 측정 하였다. 전달오차는 분해-조립을 반복하며 각 10회씩 획득 하였는데 결함을 부여하기 위해 불가피하게 행해지는 분해- 조립 에 따른 실험 결과의 편차를 고려하기 위함이었다. 기어 결함 가공 시 기어의 변형을 최소화하기 위하여 방전 와이어컷 가공을 하였는데 gear A에 박리(깊이×길이 0.5mm× 1.3mm) 을 gear B에 균열(길이 4mm)을 부여하였다(Fig. 9 참조).
5.2. 실험을 통한 전달오차 신호의 Intrinsic mode function
실험으로 획득한 엔코더 신호를 전달오차로 변환하고 노이 즈를 제거하기 위해 시간 동기화 평균 과정(time synchronous averaging, TSA)까지 마친 신호를 시뮬레이션을 통해 획득 한 전달오차와 같은 신호로 여겼고 그결과를 Fig. 10과 같이 앞 절과 동일한 과정의 신호처리를 거쳐 실험상의 RTE를 획득 하였다. 실험 결과 역시 결함신호에서 시뮬레이션과같은 양상을 보였다. Fig. 11(c), (d)에서 볼 수 있듯이 박리는 비교적 큰 결함 신호를 남겼고 균열은 비대칭형태의 첨점이 결함 신호 로 나타났다. 또한 Fig. 11 (e), (f)의 두 가지 신호필터 이후의 결함신호의 RTE 형태도 각 시뮬레이션과 같은 필터 이후 결함 별 특징을 갖고 있었다. 이에 대해 Fig. 12와 같이 EEMD를 적용하였고 결함의 대조군으로 정상상태 실험 데이터 또한 같은 과정을 거쳐 IMF를 생성하고 결과를 확인하였다. EEMD 결과 또한 시뮬레이션의결과와같았다. 박리가 있는 gear A의2번째 3번째 IMF에서는 결함에 의한 피크가 크게 나타났고 첫 번째 IMF에서는 그 영향이 적었다. 반면 균열이 있는 gear B의 첫 번째 IMF에서는 비교적 큰 피크가 나타났고 두 번째 세 번째 에서는 결함에 의한 피크가 비교적 작은 형태로 나타났으며, 이러한 양상의 결과는 10회의 실험에서 모두 확인되었다. 가장 대표적으로 1번째 IMF와 3번째 IMF의 그림을 확대하여 Fig. 13에 나타내었다.




6. 결함 분류
실험 결과인 IMF신호를 바탕으로 특징 신호를 선정하여 결함진단 및 분류를 시행하고자 하였다. 단순히 하나의 특징 신호를 가지고 결함 진단을 수행한다면 결함의 유무를 따지는 진단에서는 좋은 결과를 얻을 수 있겠지만 본 연구에서는 결함의 구분에도 목적이 있으므로 하나의 특징 신호로는 어려움이 있고 Shen(2004)의 연구결과와 같이 특징 신호의 개수가 많아진다면 좀 더 명확한 분류가 가능하지만 특징 신호를 위한 연산이 추가적으로 필요로 하고, 이는 또한 고장 물리가 없는 데이터 드리븐 형태여서 새로운 시스템에 적용하기 어려운 단점이 있다. 본 연구에서는 유한요소해석을 통해 확인하고 실험을 통해 검증한 고장 물리를 바탕으로 결함분류를 하였다. 두 결함 RTE는 EEMD 과정 모드가 분리되어 나오는데 IMF 중 결함 신호를 포함하는 비중이 박리와 균열결함에서 각기 다르게 나타났다. 본 연구에서는 EEMD 연산 순서상 비교적 먼저 도출되는IMF들을이용하여 실제적용에 있어연산 시간을 줄이고자 하였고 특징 신호의 개수를 최소로 하기 위해 첫 번째 IMF과 세 번째 IMF, 두 IMF 로부터 얻어지는 특징 신호를 이용 하여 결함을 분류하였다.
6.1. Crest factor
이산데이터에서 피크에 대한 영향이 얼마나 큰지 나타내는 통계량으로 이산데이터들의 RMS값 대비 가장 큰 피크의 절대값을 통해 구하는 파고율(crest factor)가 있으며 이는 다음과 같다.(11)
본 연구의IMF에서는 제작편차에 의한 노이즈가 섞여 있지만 결함신호가 모드 분리에 의해 피크를 나타내는 경우가 있으므로 파고율을 이용하였다. 첫 번째 IMF와 세 번째 IMF의 파고율을 두 축으로 하여 2차원 도시하면 결함상태별로 서로 섞이지 않고 잘 구분되는 것을 확인할 수 있다(Fig. 14 참조).

6.2. Bayes decision 이론
결함상태를 파악하기 위한 데이터 구분을 위해 베이지안 구별법(bayesian classifier)를 이용하였다. gear A와 gear B의 정상상태는 같은 집단으로 여기고 각 집단을 2변수 정규 분포로 가정하였다. 각 집단의 데이터를 기반으로 공분산 i를 구하고 우도 함수에 적용하여 우도 를 구하였다. 우도함수와 공분산에 관한 식은 식 (12), (13)과 같다.
Fig. 15는 기어의 결함 조건에 대한 우도를 등고선로 표현한 그림이다. 새로운 데이터가 수집되었을 때 식 (14)와 같은 베이즈 법칙을 이용하여 집단에 소속되어있을 확률 을 비교하고 가장 확률 높은 집단으로 분류하는 기법을 이용하여 기어의 상태를 판단할 수 있다.

본 기어박스 실험장치에서는 사전정보가 없으므로 사전확률 P(wi)는 세 집단 모두 동일하다고 여길 수 있다. 따라서 우도의 단순한 비교만으로 확률 비교가 가능하다.
7. 결 론
본 연구에서는 기계장치에서흔히 사용하는 기어 중에서가장 기초적 형태라 할 수 있는 스퍼기어의 결함진단을 수행하였다. 기어의 전달오차를 측정하여 단순 결함 유무뿐 아니라 접촉 응력에 의해 발생하는 박리결함과 굽힘 응력으로 인한 균열 결함을 구분 진단하였다. 이를 위해 유한요소해석을 수행하여 두 결함의 특징을 확인하였고, 시뮬레이션 결함신호를 만든 후 필터 및 EEMD를 이용하여 결함 신호를 식별하였다. EEMD 기법에서는 IMF를 분리하고 결함 신호가 가장 큰 영향을 미친 IMF를 확인하는 방식으로 결함분류의 가능성을 확인하였다. 이를 실제로 검증하기 위한 실험 장치를 꾸렸고 이로부터 획득한 전달오차를 이용하여 첫번째 IMF에서는 균열신호가, 세번째 IMF에서는 박리신호가 강하게 나타남을 확인하였다. 이로 부터 특징신호를 얻기 위해 파고율을 계산하였고 그 결과를 2차원 그래프로 표시하였다. 또한 결함의 식별을 위해 베이즈 결정(bayes decision)이론을 이용하였다. 본 연구는 앞서 언급했던 것과 같이 가장 기초적인 형태의 기어를 대상으로 진행되었고 실험조건 또한 상대적으로 저속조건이라는 한계점을 지니고 있다. 본 연구에서의 실험 조건들은 인위적인 결함 부여를 통하여 진행되었다. 따라서실제 결함의 경우에서도 같은 경향성이 확인되어질 필요가 있다. 또한 각 결함모드에서의 결함 크기에 따른 영향 또한 추가적으로 연구가 필요하다. 앞서 언급 한 본 연구의 한계점을 보안 한 이후에 실제 상황에 적용을 위해 회전속도를 고려한 동적해석과 실험을 통해 동적 전달 오차 대한결함진단연구진행이 필요하고실제 시스템에서다른 기계요소가 전달오차에 미치는 영향을 고려한 연구진행 또한 필요하다.
