

1. 서 론
구조물 건전성 모니터링(SHM: structural health moitoring)은 건축 및 토목공학 분야에서 매우 중요해 왔으며, 이의 수요 또한 지속적으로 증가해 오고 있다. 더욱이 다양한 SHM 방법 중 초음파 탐상, 자분탐상 등의 비파괴 검사 (NDT, non-destructive testing)방법은 강자성체의 손상 검출 및 구조적 평가에 있어 광범위하게 이용되고 있다(Kang et al., 2014;Shi et al., 2015). 이러한 강자성체 대상 구조물의 비파괴 검사법 중 누설자속 기법은 소형 구조물의 표면 및 표면 근처 결함을 검출하는데 최적화되어 있어 자주 이용되고 있다(Wilson et al., 2006).
강자성체인 와이어로프는 승강기 및 건설 중장비 분야에서 사람 또는 물체를 이동하기 위한 수단으로 많이 사용되며 매우 중요한 역할을 하고 있다. 와이어로프 내의 소선의 절단, 마모 또는 부식 등의 작은 결함이 와이어로프의 절단으로 진행되어 큰 인명피해로 이어질 수 있으며, 최근 수년간 크고 작은 재해들이 끊임없이 발생해 오고 있다(Singh et al., 2007). 따라서 와이어로프 결함을 조기에 진단하여 적절한 시기에 교체해 주는 것이 매우 중요하다고 볼 수 있다.
그동안 와이어로프에 관하여 수명 추정(Park et al., 2016), 승강기 와이어로프 결함 진단(Kim et al., 2015) 및 크레인 와이어로프 결함 진단(Lee et al., 2005)에 관한 연구들이 진행되어 왔다. 강자성체 구조물 결함을 진단하며 정량화하는 연구의 대상은 주로 파이프라인이었으며(Li et al., 2009;Chen et al., 2005), 와이어로프의 경우 단순히 결함을 진단하는 것에 그쳐 결함의 정도를 파악하여 조치를 취해 주는데 어려움이 있어 왔다. 또한 누설자속기법을 사장교 핵심 부재인 케이블에 적용하는 연구가 이루어졌지만(Kim et al., 2014), 엘리베이터 케이블과 같은 작은 직경을 가진 물체에 발생한 손상을 정량화하는 연구는 거의 진행되지 않았다.
이에 본 논문에서는 추후 누설자속탐상 기법을 이용한 와이어 로프 결함의 정량적 분석을 위한 선행연구로 와이어로프와 동일한 강자성 물질 및 직경을 가지는 강봉을 이용하였다.
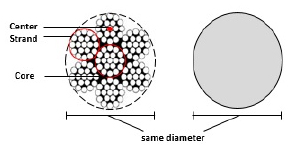
Fig. 1은 동일한 직경의 와이어로프와 강봉의 단면을 나타낸 것이다. 와이어로프는 기본적으로 코어가 중심에 배치되어 있으며, 가는 소선들로 이루어진 여러 개의 스트랜드가 코어를 둘러쌓고 있는 구조로 이루어져 있다. 따라서 와이어로프의 소선 및 스트랜드 간 공간이 가득 메워진 형태의 강봉을 이용 하여 결함으로 인한 단면 변화로부터 나오는 신호의 정량적인 분석을 연구하고자 한다.
2. 누설자속기법 원리
이 장에서는 강자성체에 작용하는 자기장 이론에 대하여 간략히 설명한 후, 이를 바탕으로 누설자속기법의 원리를 소개하고자 한다.
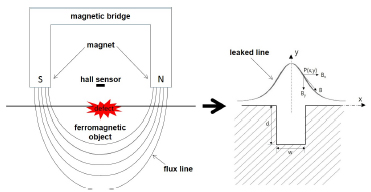
Fig. 2는 누설자속기법의 기본적인 원리를 보여준다. 그림의 왼쪽 편에는 누설자속 탐상 시스템의 구성요소를 표기하였다. 기본적으로 자기력을 인가하는 영구자석, 인가된 자기력선이 흐를 수 있는 자기 브리지, 강자성체 시편으로 구성된다. 이렇게 구성된 시스템에서 자기력선은 폐루프를 형성하며 흐르게 되며, 강자성체 표면에 결함이 발생하게 되면 오른쪽 그림과 같이 자기력선이 그 표면으로 누설되게 된다. 이를 중앙에 위치한 홀 센서를 통하여 자기력선의 x 성분 또는 y 성분을 감지하게 되는 것이다(Bubenik, 1992).
3. 시뮬레이션 연구
이 장에서는 2장에서 설명한 누설자속기법의 원리를 바탕으로 누설자속 신호 획득을 위한 시뮬레이션을 진행한 후 그 결과를 분석하였다.
3.1 시뮬레이션 셋업
시뮬레이션은 전자기적 유한요소 해석 프로그램을 이용 하였으며 누설자속기법을 적용시켜 진행하였다. Fig. 3은 시뮬레이션에 사용된 2D 모델을 나타낸 것이다. 본 모델은 진행한 실험에 사용된 누설자속탐상 시스템에서의 센서헤드 및 강봉 시편과 동일한 치수로 모델링되었으며 아래 그림에 그 치수를 표기하였다.

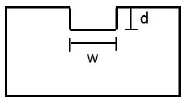
위 모델에서 요크는 자기력선이 흐르는 자기 브리지 역할을 담당한다. 리프트오프는 영구자석 최하단부와 강자성체 시편의 최상단부 간 수직거리 또는 홀센서와 강자성체 시편 최상단부 간 거리를 의미하는데, 본 연구에서는 두 거리가 같게 하였으며, 실험도 동일하게 설정하였다. Fig. 4는 강자성체 시편에 생성된 결함 모델을 나타낸 것이다. 본 시뮬레이션 연구를 진행하여 결함으로부터의 누설자속신호의 그 값을 정량적으로 분석하기 위하여 너비(w) 및 깊이(d)를 가지는 간단한 직사각형 결함 모델을 사용하였다.
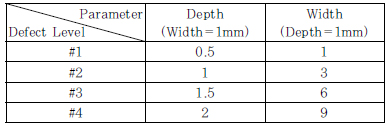
위 결함 모델을 이용하여 Table 1에 시뮬레이션 시나리오를 나타내었다. 깊이 및 너비가 레벨에 따라 변화하는 2 종류의 결함에 대하여 시뮬레이션 시나리오가 구성되었고, 각 시나리오는 1m/s, 2m/s, 3m/s와 같이 3가지 속도에 대하여 10kHz의 샘플링으로 시뮬레이션 되었다.
3.2 시뮬레이션 결과
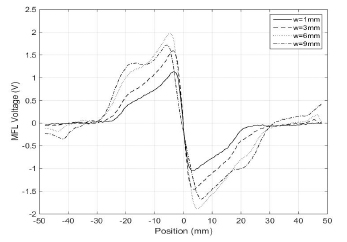
Fig. 5 및 Fig. 6에 탐상속도 1m/s로 진행한 시뮬레이션 결과를 나타내었다. 여기서 누설자속신호의 단위는 자속밀도의 단위인 mT로 표기되었다.
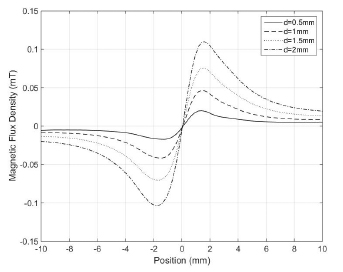
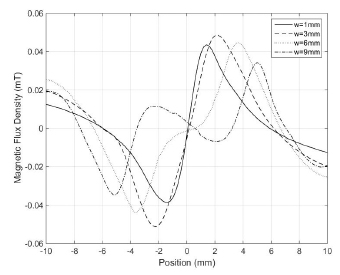
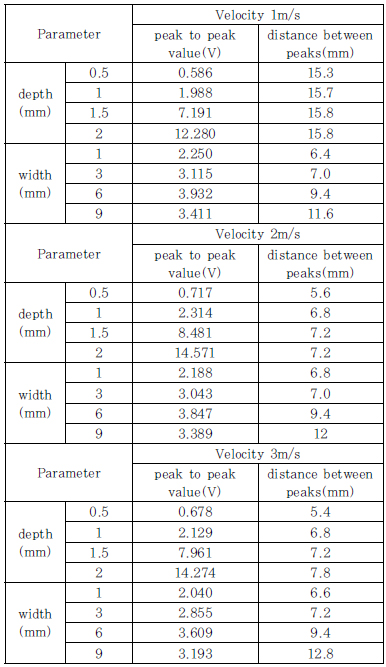
본 시뮬레이션 결과 값은 자속밀도의 y성분을 추출하여 표기하였으며, 누설자석 신호의 경향과 피크(peak)값을 분석함에 있어 peak to peak value 및 peak 간 거리 분석을 진행하여 Table 2에 나타내었다.
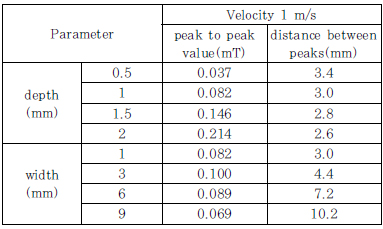
누설자속 신호의 peak to peak value는 결함의 깊이가 깊어질수록 커짐을 알 수 있었으며, 변수가 결함의 너비인 경우에는 그 값이 일정하지 않음을 알 수 있었다. peak 간 거리는 결함의 깊이가 커질수록 줄어들었으며, 너비 결함의 경우에는 깊이 결함의 경우보다 그 크기가 크지 않음을 알 수 있었다. 또한, peak 값이 발생하는 지점 간의 거리는 손상 부의 폭과 일치하지 않으며, 더 넓게 분포함을 알 수 있었다.
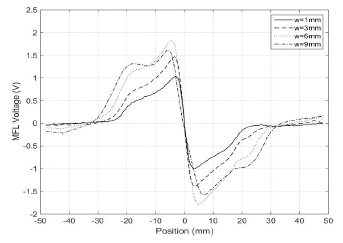
본 시뮬레이션은 또한 2m/s 및 3m/s 속도로도 진행 되었으며, 1m/s의 경우와 동일하게 분석하여 peak to peak value의 변화율을 Fig. 7에 나타내었다.
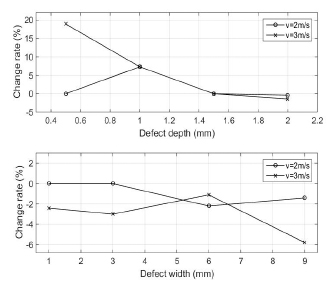
너비 결함의 경우의 peak to peak value의 변화율이 깊이 결함의 경우보다 작음을 알 수 있으며, 대부분의 경우가 차이가 5% 미만으로 미소함을 알 수 있었다. 이는 시뮬레이션의 데이터 샘플링이 속도의 증가에 관계없이 일정하게 유지되었기 때문이며, 시뮬레이션의 해석에 영향을 미쳤을 것으로 판단된다.
4. 실험적 연구
이 장에서는 실제 강봉 시편을 이용하여 앞 장에서 진행한 시뮬레이션과 동일한 케이스로 실험을 진행하였다.
4.1 실험 셋업
시뮬레이션 연구에서 손상의 변수로 설정하였던 깊이 및 너비의 변화에 따라 얻어진 자속밀도 값의 분석 내용을 바탕으로 결과 검증을 위하여 직경 10mm의 강봉 시편을 이용하여 누설 자속 탐상 실험을 진행하였다.
Fig. 8은 누설자속 실험의 장비 구성을 나타낸 것이다. 직선이동시험장치 및 제어장치, 센서헤드(8채널), 데이터수집 장치(DAQ) 및 신호처리 보드, 그리고 신호 분석을 위한 노트북 컴퓨터로 구성된다. 직선이동시험장치 및 제어장치는 센서헤드에 일정한 속도를 가해주고, 센서헤드는 이동 중 누설자속신호를 측정하며, 데이터수집장치는 측정한 데이터를 수집한다. 수집된 데이터는 신호처리 보드를 통하여 처리되며, 마지막으로 처리된 데이터는 노트북 컴퓨터 화면으로 전송하여 사용자가 볼 수 있다.
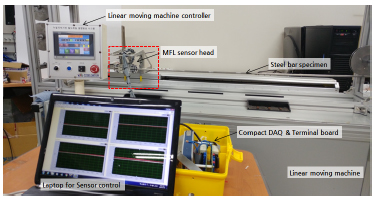
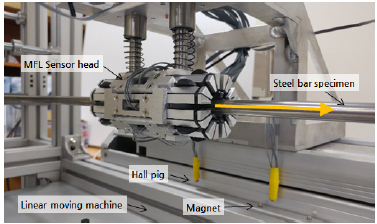
Fig. 9는 센서헤드 부분을 확대한 것이다. 홀센서 피그를 브라켓의 하단에 부착하고, 센서헤드의 이동 시 바닥면에 일정한 간격으로 부착된 자석에서 발생하는 자속을 측정하는 방법으로 센서헤드의 이동거리를 측정하였다.
누설자속의 측정 및 정량적 분석을 위하여 Table 3 및 Table 4에 나타나 있는 손상 사진과 같이 강봉에 인공적으로 손상을 가공하였다. 깊이 및 너비 손상의 정도를 시뮬레이션 연구와 같이 4단계로 구분하였으며, 센서헤드의 움직임이 시작되는 지점으로부터 각각 100mm, 250mm, 400mm, 550mm 지점에 생성하였다. 깊이 손상의 경우에는 너비를 1mm로 고정하였으며, 너비 손상의 경우 깊이를 1mm로 고정하였다.
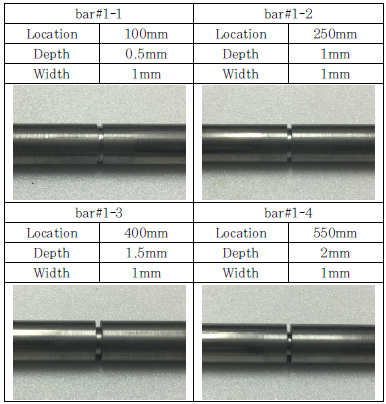
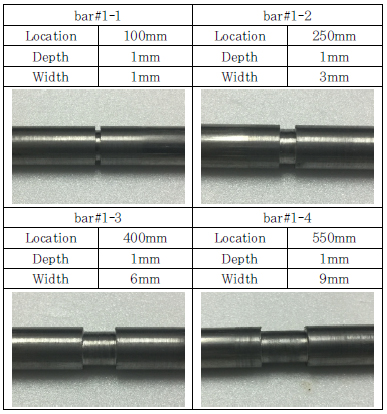
Table3과 Table 4에 나타낸 바와 같이 가공된 강봉 시편을 이용하여 케이스별로 누설자속탐상 실험을 진행하였다.
4.2 누설자속탐상 실험 결과
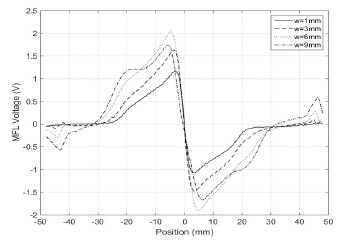
누설자속탐상 실험을 진행하며 수집된 신호의 분석에 앞서 25회씩 측정한 데이터들의 손상 구간별 평균치를 얻고, 평균치를 다시 빼주어 오프셋을 조정하였다. Fig. 10~Fig. 12는 깊이 손상 케이스들을, Fig. 13~Fig. 15는 너비 손상 케이스들을 센서헤드의 움직임 속도 1m/s, 2m/s, 3m/s에 대하여 수행한 실험 데이터를 처리하여 손상 부위에서 누설자속 신호를 나타낸 것이다. Fig. 11, 14
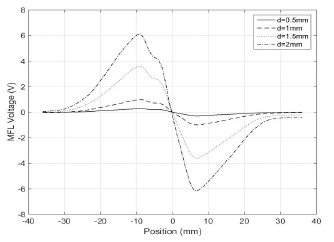
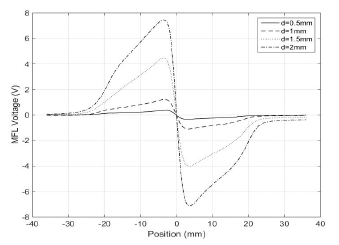
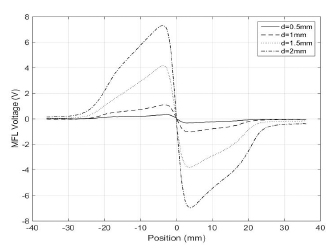
깊이 손상의 경우 누설자속 신호인 전압 값은 시뮬레이션의 결과와 상당히 유사한 형태를 보임을 알 수 있었다. 깊이 0.5mm 손상의 경우에는 다른 손상의 경우보다 그 peak 지점 전압 값이 비교적 작음을 알 수 있었다.
너비 손상의 경우 깊이 손상과는 다르게 누설자속 신호 곡선 상에 부분적으로 굴곡이 있음을 알 수 있다. 또한 특징적인 것은 너비 손상의 경우 모두 그 깊이가 1mm로 동일한데 반하여 peak to peak value는 일정하지 않음을 알 수 있었다.
Table 5는 두 종류의 손상에 대하여 peak to peak 값과 peak 간 간격을 표로 나타낸 것이다.
탐상속도가 1m/s인 경우 깊이 손상 결과에서 peak 간 간격이 다른 탐상속도 경우의 값들보다 큰 것을 제외하면, 깊이 손상의 경우보다 너비 손상 누설자속 신호에서의 peak 간 간격이 실제 손상의 폭에 더 가깝게 나오는 점에서 시뮬레이션과 그 경향이 일치하였다. 또한, 센서헤드의 속도가 2m/s 및 3m/s의 경우 그 누설자속 값이 크게 변하지 않은 것으로 보아 속도가 누설자속 값에 미치는 영향이 적은 것을 알 수 있었다.
실험 결과와 시뮬레이션 분석 결과를 바탕으로 동일한 강자 성체 시편을 이용하여 얻은 누설자속 신호의 peak to peak value 및 peak 간 간격 값을 이용하면 손상의 변수 및 손상의 정도를 파악할 수 있음을 알 수 있었다. 따라서 본 실험 결과를 분석한 값을 사용하여 역으로 각 손상의 정보를 추정하기 위하여 Fig. 16과 같이 두 종류의 손상을 구분하였다.
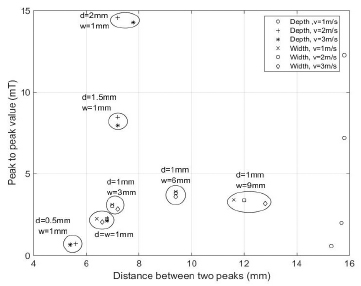
누설자속 신호의 peak to peak value와 peak 간 거리를 이용하여 두 종류의 손상에 대하여 한 평면에 그 데이터를 나타낸 결과 깊이 손상의 속도 1m/s를 제외하면 그 영역이 명확히 구분됨을 알 수 있었다.
본 연구를 통하여 손상 신호의 특성을 이용한 손상 종류의 분류가 가능함이 검증되었고, 다양한 종류의 손상을 통한 손상 분류도 가능할 것으로 판단된다.
5. 결 론
본 연구에서는 누설자속기법을 이용하여 강봉에 대한 누설자 속탐상 시뮬레이션 및 실험을 통하여 손상 검출 및 분류의 가능성을 검증하였다.
직경 10mm의 강봉을 강자성체 시편으로 이용하였고, 네오디뮴 영구자석 및 요크와 같이 세 구조체 사이에 자기력선이 흐르도록 전자기적 유한요소 해석프로그램을 이용하여 모델링 하였다. 강봉의 손상으로부터 검출되는 누설자속 신호의 정량화를 위하여 너비와 깊이를 가지는 직사각형 결함을 이용하였으며, 너비와 깊이를 손상 변수로 가정하여 센서헤드가 1m/s, 2m/s, 3m/s의 세 가지 속도로 탐상하도록 시뮬레이션을 진행하였다.
시뮬레이션 결과 깊이 및 너비 손상 케이스 모두 그 변수의 값이 커질수록 peak to peak value가 커짐을 확인할 수 있었고, 샘플링이 10kHz로 고정되어 속도의 변화에 따라 그 값에 미소한 차이가 있음을 알 수 있었다. 또한 깊이손상 및 너비 손상 케이스 모두 peak 간 간격이 손상의 폭과 일치하지 않고 더 컸으며, 너비손상의 경우가 깊이 손상의 경우보다 실제 손상 폭에 더 가깝게 나타났다.
누설자속탐상 실험의 경우 시뮬레이션과 동일한 조건으로 진행이 되었다. 신호 측정은 케이스별 25회 진행하였으며, 데이터 분석 시 센서헤드 8채널에서 획득된 신호를 손상 구간 별로 잘라 평균을 취하고 오프셋을 제거하였다.
실험 결과 분석된 누설자속신호는 1m/s의 속도로 탐상된 깊이 손상의 경우를 제외하면 시뮬레이션 결과의 경향과 일치 함을 확인할 수 있었다. 시뮬레이션의 결과와 마찬가지로 탐상 속도의 변화는 누설자속신호에 큰 영향을 주지 않는 것으로 판단되었다.
시뮬레이션 및 실험 결과를 확인한 후 손상으로부터 얻어진 누설자속 신호의 특성인 peak to peak value와 peak 간 간격을 이용하여 가공된 손상을 분류하였다. 깊이 손상과 너비 손상은 각각의 변수가 커질수록 분류가 명확히 됨을 알 수 있었다.
이를 통해 본 연구에서 진행된 강봉을 이용한 시뮬레이션 및 실험을 통한 누설자속신호의 정량화 및 손상 분류의 가능성을 확인하였다.
