

1. 서 론
2. 앙상블 학습을 통한 동특성기반 구조물 이상감지
2.1 앙상블 학습
2.2 동특성기반 구조물 이상감지 실험
3. 시스템 구축
3.1 하드웨어 구성
3.2 소프트웨어 구성
3.3 시스템 현장설치 및 데이터 취득
4. 결 론
1. 서 론
건축물의 파손, 붕괴 등으로 인한 재해로부터 인적·경제적 손실을 예방하고 구조물의 이상감지를 위해 구조물의 건전도 모니터링(Structural Health Monitoring, SHM)연구가 활발히 수행되고 있다(Kim and Lynch, 2012; Kim and Sohn, 2013; Min et al., 2013). SHM의 목표는 센서를 활용하여 구조적 성능과 상태를 정량적으로 평가하고 객관적인 지표를 제공하는 것으로, 현재는 구조물에 장기적으로 발생하는 노후화를 정량적으로 파악하기 위한 일반화된 모니터링 시스템에 관한 연구가 세계적으로 활발히 수행중이다(Hao et al., 2017; Kim and Lynch, 2012; Michal et al., 2018).
지진 계측 및 지진발생시 구조물의 거동에 관한 데이터 취득을 위해 행정안전부에서는 2010년에 지진가속도계측기 설치 및 운영기준을 시행하여 중앙행정기관 및 지방자치단체 청사, 초고층 구조물, 국립대학교 등 국가 중요 시설물에 대해 지진가속도계를 필수적으로 설치해야 하는 법규를 제정했다. 그러나 국가 중요 시설물과 대조적으로 민간 건물을 대상으로 하는 건물의 안전진단은 모니터링 시스템이 거의 적용되지 않고, 건물의 노후도에 따라 등급별로 주기적으로 인력을 통한 노동집약적 안전진단 점검이 수행되고 있다. 구조물 건전도 모니터링 시스템이 건설, 센싱, ICT 기술이 융합된 첨단 기술임에도 불구하고 모니터링 시스템 설치 운영의 경제성과 구조건전도 평가를 위한 모니터링 데이터 활용에 한계점 등으로 인해 실제 적용에 제한이 따르고 있다.
최근 하드웨어 분야에서 전자부품소재 기술력 발전은 고성능의 소형 싱글보드컴퓨터(SBC, single board computer)와 센서의 고성능을 유지하며 보급을 이뤄 무인자동차, 드론 등의 연구에 다양하게 활용되고 있다(Ferdoush and Li, 2014; Narayan and Minsakshee, 2014; Velez and Nadziejko, 2015). 또한 소프트웨어 분야에서 인공지능의 발전으로, 센서 데이터 및 이미지 처리 분야에서 기존의 알고리즘의 성능을 향상시키기 위한 연구가 활발히 수행되고 있다(Buhus et al., 2016; Cyrel et al., 2015).
본 논문에서는 싱글보드컴퓨터 중 라즈베리파이(Raspberry Pi)와 보급형 가속도계, 기울기센서, GPS RTK 모듈, 로라(LoRa) 통신 모듈로 구성된 하드웨어를 구성하고, 실시간으로 취득되는 계측데이터(Raw data) 중 구조물 건전도 진단에 요구되는 구조물의 동특성을 부분적으로 추출하여 전송할 수 있는 분산처리 알고리즘을 싱글보드컴퓨터에 탑재하여 무선 엣지 컴퓨팅(Edge computing) 시스템을 구축하는 것을 목적으로 한다. 이를 위해 머신러닝 중 앙상블 학습을 통해 구조물에서 취득되는 동특성을 기반으로 한 구조물 이상감지 실험을 수행하였으며, 실험을 기반으로 건물의 이상감지가 가능한 동특성 추출 알고리즘을 구성하여 라즈베리파이에 탑재한 후 실 건물에 현장 설치되었다. 무선 로라통신 시스템에 관한 검증은 본 연구진의 사전연구(Shin et al., 2019)에 의해 수행되었으며 사전연구를 기반으로 무선 데이터를 취득하였다.
본 논문의 구성으로써 2장에는 구조물의 이상을 감지하기 위한 머신러닝 기법 중 앙상블학습의 이론과 앙상블 학습을 적용한 구조물 모형의 이상상태 감지 실험에 대하여 기술하였다. 3장에서는 구조물 진단 모니터링 분산처리 시스템의 하드웨어 및 소프트웨어를 구축하였다. 또한 시스템을 실 건물에 설치한 후 구성된 시스템으로부터 데이터를 취득하여 본 시스템의 현장 적용성을 확인하였다.
2. 앙상블 학습을 통한 동특성기반 구조물 이상감지
2.1 앙상블 학습
기계학습은 추출된 특징과 사전에 정의된 알고리즘을 이용해 데이터를 분석하고 학습하며, 학습된 내용을 기반으로 결과물을 판단하거나 예측하는 것과 같이 자동으로 의사를 결정한다. 기계학습의 목적은 대량의 데이터와 알고리즘을 통해 컴퓨터 데이터를 학습시켜 목표로 하는 작업의 수행 방법을 자동으로 익히는 것을 목표로 한다. 기계학습의 알고리즘 방식에는 선형 회귀, 로지스틱 회귀, SVM(Support Vector Machine), 의사 결정 트리 등이 있으며 기계 학습을 적용하는 방식에 따라 지도학습(Supervised learning), 비지도학습(Unsupervised learning), 강화학습(Reinforcement learning)으로 분류할 수 있다. 기계학습 알고리즘의 선정 기준은 학습 대상과 데이터, 목적에 따라 상이하며 성능이 우수한 알고리즘을 선정하기 위해서는 반복적인 학습을 통한 알고리즘의 선별작업이 요구된다.
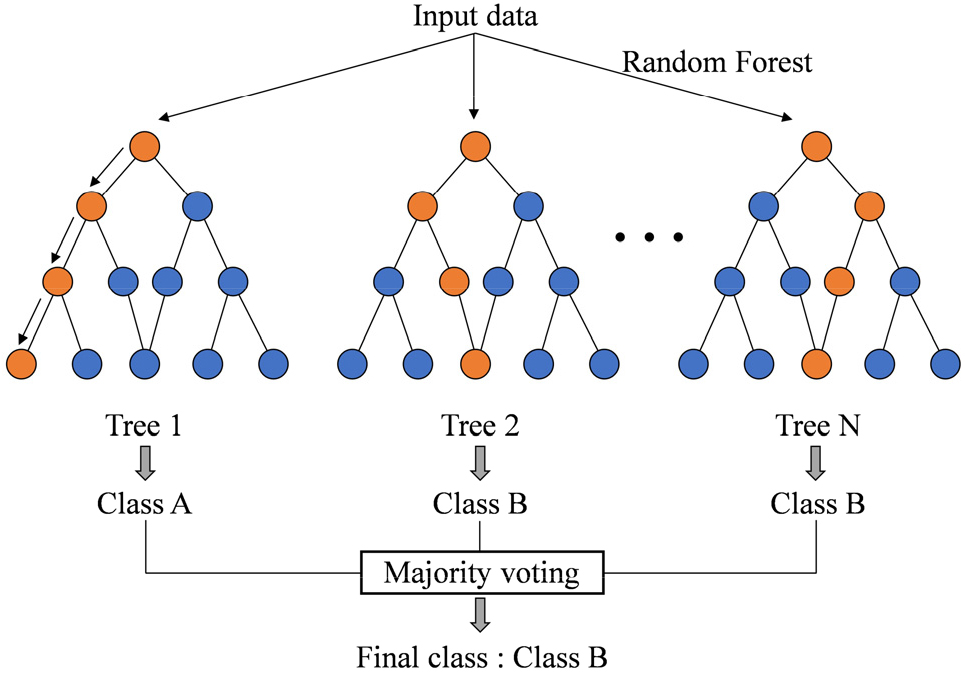
기계학습 알고리즘 중 안정적이고 보편적으로 적용할 수 있는 알고리즘은 앙상블 학습(Ensemble learning)이다. 앙상블의 유형은 베이즈(Bayes) 최적분류기, 배깅(bagging), 랜덤포레스트(Random forest) 등이 있다. 베이즈 최적분류기는 가설공간 내에서 데이터가 주어지고 관측값의 클래스를 분류할 때 앙상블의 가설을 형성하여 각 가설에 대한 확률을 산정하고 곱하여 최종 데이터의 클래스를 예측하는 것이다. 배깅은 데이터가 주어졌을 때 베이즈 최적분류를 포함하여 사전에 성능이 검증된 선형 회귀, 로지스틱 회귀, SVM와 같은 단일 학습 알고리즘에 중복가능한 무작위의 데이터셋을 여러 번 입력하여 다수의 분류기를 생성하고 각 분류기에서 클래스에 대한 예측을 수행하여 최종 분류기들의 결과 중 동일한 클래스가 많은 클래스를 투표(Voting)를 통해 선택하는 방식이고, 랜덤 포레스트는 배깅에서 파생되어 다수의 학습기와 무작위의 데이터셋을 사용하여 예측을 수행방식이다. 본 연구에서는 랜덤포레스트 학습이 사용되었으며 랜덤포레스트 학습의 모식도는 Fig. 1과 같다.
2.2 동특성기반 구조물 이상감지 실험
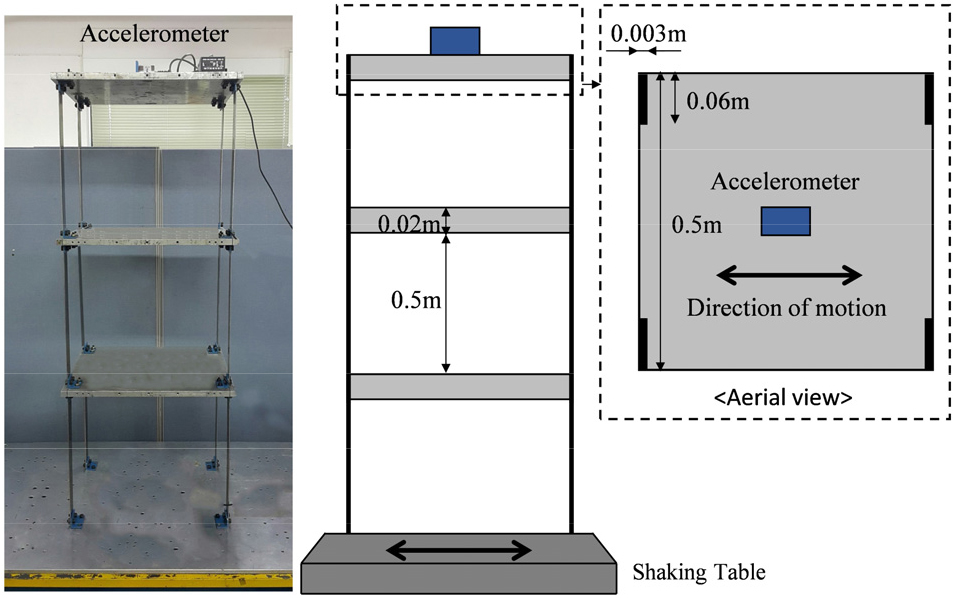
건물에서 취득되는 동특성은 건물의 구조적 상태를 내포하고 있으므로 건물에서 취득되는 동특성을 활용한 이상상태를 감지하기 위해 실험실 수준의 구조물 모형을 제작하여 실험을 수행하였다. 철골로 제작된 3층 구조물 모형에 앙상블 학습을 위해 건물에 이상상태를 임의로 부여하여 지도 학습하였다. 구조물 모형은 층별 높이가 0.5m, 슬래브는 20kg이며, 구조물 모형의 진동 응답 데이터 취득을 위해 본 논문에서 활용되는 센서 중 가속도계를 선정하였다. Fig. 2와 같이 구조물 모형 최상층에 1개의 가속도계를 설치하고 데이터 수집장치(Data Acquisition, DAQ)를 활용하여 가속도 데이터를 취득하였다. 3층 구조물 모형은 서보모터로 작동되는 진동테이블 위에 설치되어 가진되었다. 진동테이블에서는 상시진동을 모사하기 위해 최대 가속도 약 0.2g의 화이트노이즈(White noise)가 입력되었다.
건물에 이상상태를 부여하기 위해 총 6가지의 손상 케이스를 생성하였고 손상 케이스의 상세 내용은 Table 1과 같다. 첫번째 케이스는 손상이 없는 정상상태, 2~4번째 케이스는 각각 3, 2, 1층의 기둥 1개를 제거한 상태, 5, 6번째 케이스는 각각 2, 1층에 기둥을 연결하고 있는 볼트 2개를 제거한 상태다. 각 케이스별로 1분간, 총 10회의 화이트노이즈 진동을 가진하여 총 60개의 시계열 데이터를 취득하였으며 매 가진시 새로운 화이트노이즈를 생성하였다.
Table 1.
Description of 6 damage cases
| Location | |||
| 1stfloor | 2ndfloor | 3rdfloor | |
| Case 1 | - | - | - |
| Case 2 | - | - | Remove 1column |
| Case 3 | - | Remove 1column | - |
| Case 4 | Remove 1column | - | - |
| Case 5 | - | Remove 2bolts | - |
| Case 6 | Remove 2bolts | - | - |
Fig. 3은 입력된 각 케이스별 취득된 10개의 응답 데이터 중 1개의 응답만이 제시되어 있다. Fig. 3(a)는 정상 상태의 응답, Fig. 3(b)는 각각 3층, 2층, 1층의 기둥 1개가 제거된 상태의 응답, Fig. 3(c)는 각각 2층, 1층의 볼트 2개가 제거된 상태의 응답이다. 60초 동안 최대 가속도 약 0.4g 내외의 응답이 출력됐으며 정상과 비정상의 파형의 차이점을 육안으로 구분하기 어려운 것을 확인하였다.
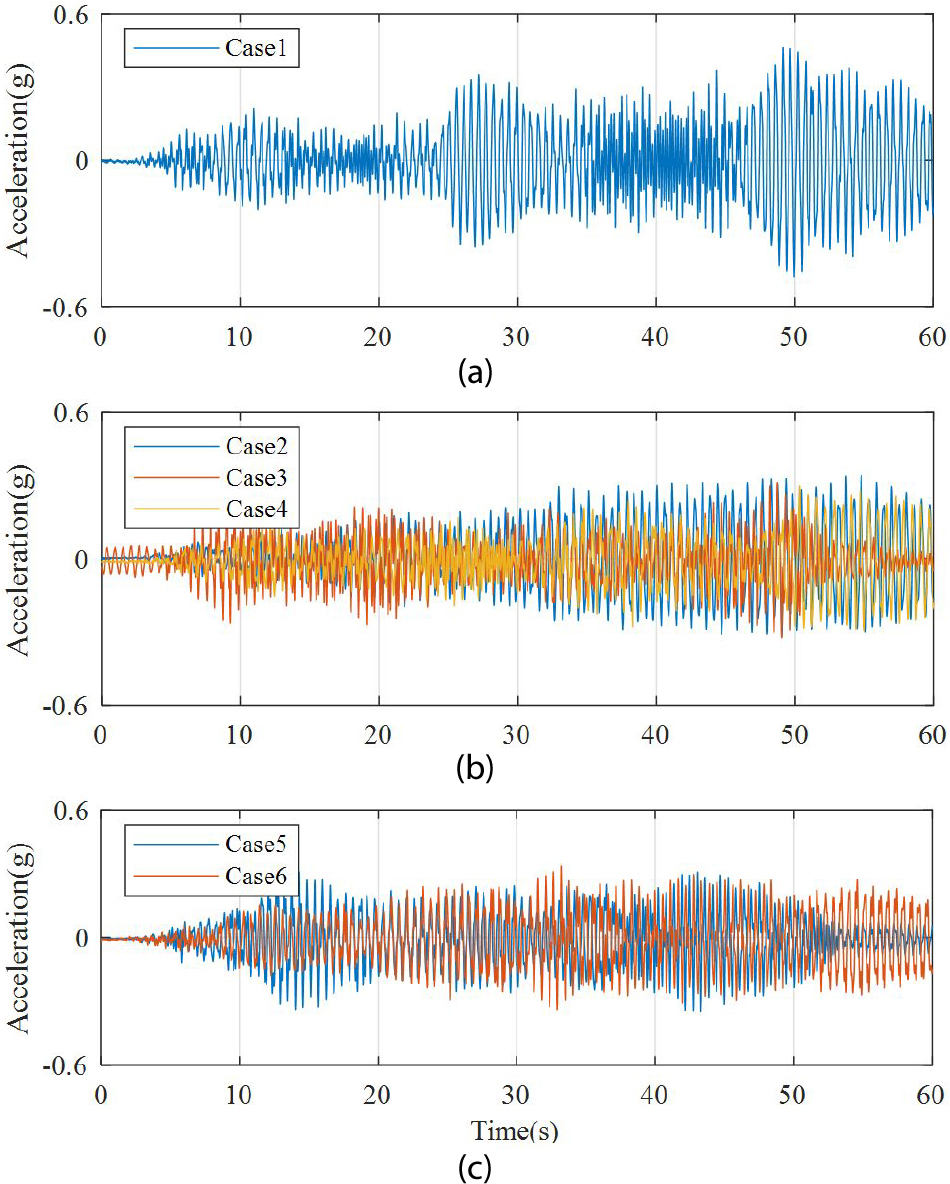
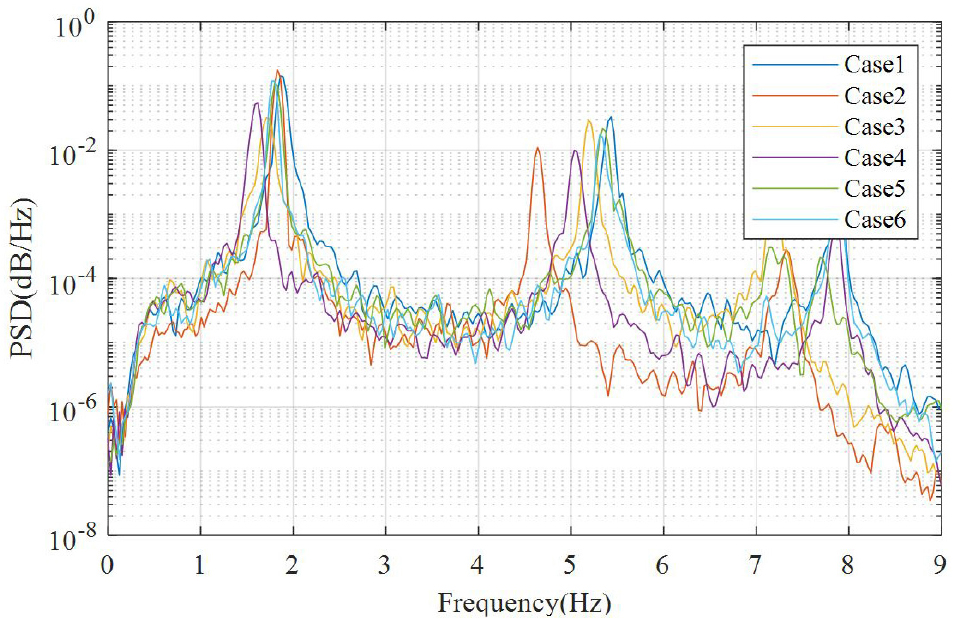
Fig. 4는 Figs. 3(a)~3(c)의 시계열 데이터의 파워 스펙트럼 밀도(Power Spectral Density, PSD) 분석의 결과다. PSD분석은 주파수 분해능 0.02Hz, 샘플링 주기 20초마다 해밍윈도우(Hamming window), 50%를 오버랩(Overlap)을 적용하여 취득하였다. 정상 상태 모형의 1, 2, 3차 고유 진동수는 각각 1.86Hz, 5.31Hz, 7.87Hz이며, 각 손상 케이스로부터 추출된 고유진동수 중 1차 고유진동수는 정상 상태의 고유진동수와 유사하며 2, 3차 고유진동수는 일부 손상 케이스에 대해서 최대 0.6Hz의 차이를 보였다. 그러나 여전히 정상 상태와 이상 상태를 구분하기 힘든 손상 케이스가 있으며 이를 구분하기 위해 시계열 데이터와 PSD 데이터의 특징을 추출하여 특징 기반의 기계학습을 수행하였다.
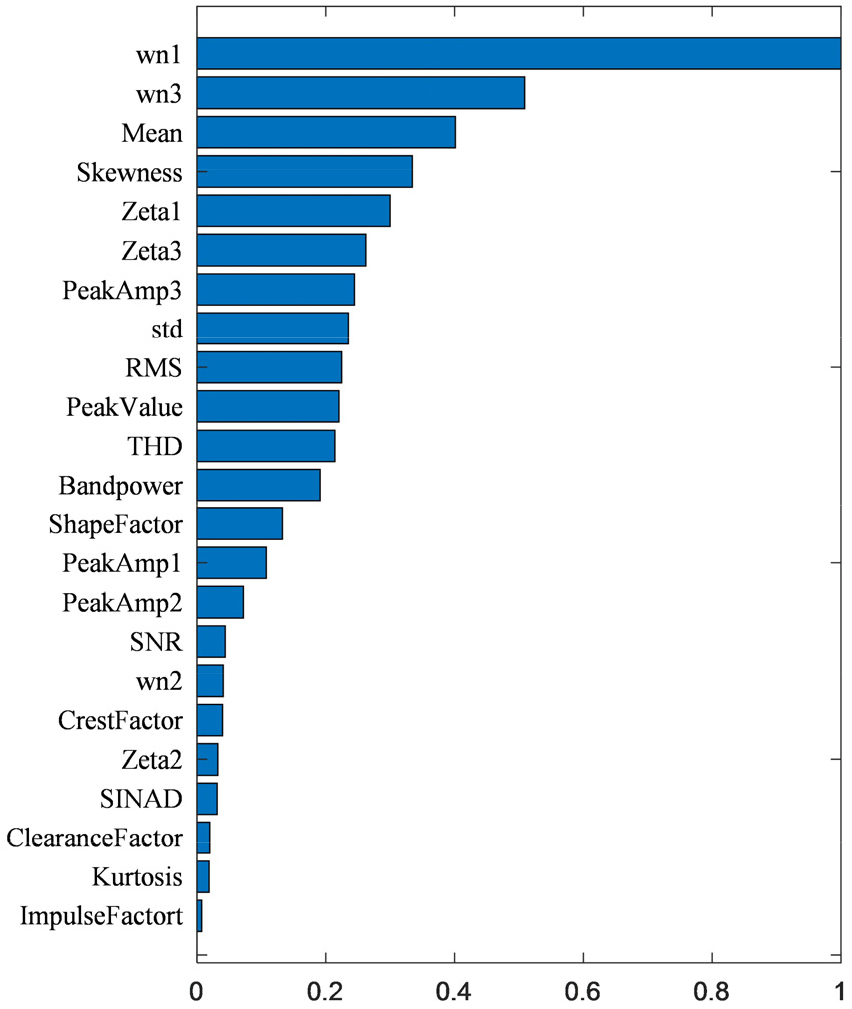
시계열 데이터와 PSD 분석 결과에서 추출한 특징은 23개로 60개의 데이터에서 총 1,380개의 특징을 추출하였다. 단일 데이터별 시계열 데이터에서 최댓값, 평균값, RMS(Root Mean Square), 표준편차(Standard deviation, std), 비대칭도(Skewness), 형상인자(Shape factor), 융기인자(Crest factor), 클리어런스 팩터(Clearance factor), 신호대잡음비(Signal to Noise Ratio, SNR), 첨도(Kurtosis), 충격계수(Impulse factor), 신호대잡음비의 왜곡값(Signal to Noise Ratio and Distortion, SINAD), 전고조파배율(Total harmonic distortion) 13개를 추출하였으며 PSD 분석에서 PSD의 1, 2, 3차 고유진동수, 대역폭(Band power), 고유진동수의 피크값, 감쇠 10개의 특징을 추출하여 총 26개의 특징을 추출하였다. 23개의 특징이 정상상태와 이상상태를 분별하는 척도로, T-Test를 통해 어떠한 특징에서 정상과 이상의 가장 큰 차이가 발생하는지 분석하였다. T-Test의 결과는 Fig. 5와 같으며 분류 성능이 가장 높은 특징인 1차 고유진동수에 대해 정규화하여 표현하였다. 분류 성능은 1차 고유진동수, 3차 고유진동수, 평균값, 비대칭도 순으로 나타났다.
최적 모델을 추출하기 위해 23개의 특징 중 분류성능이 높은 특징부터 학습에 사용되는 특징의 개수를 T-Test 값 0.05미만을 제외한 1개부터 20개까지 증가시키며 학습모델의 정확도를 추출하였으며 그 결과가 Fig. 6에 제시되어 있다. 가장 높은 정확도를 나타낸 특징의 개수는 5, 9개로 98.3%의 정확도를 보였다. 60개의 데이터 중 1개의 데이터를 제외한 59개의 데이터를 학습모델로 정상상태와 이상상태를 분류하였음을 확인했으며 특징의 개수가 9개를 초과한 후부터 정확도가 낮아지는 것을 확인하였다.
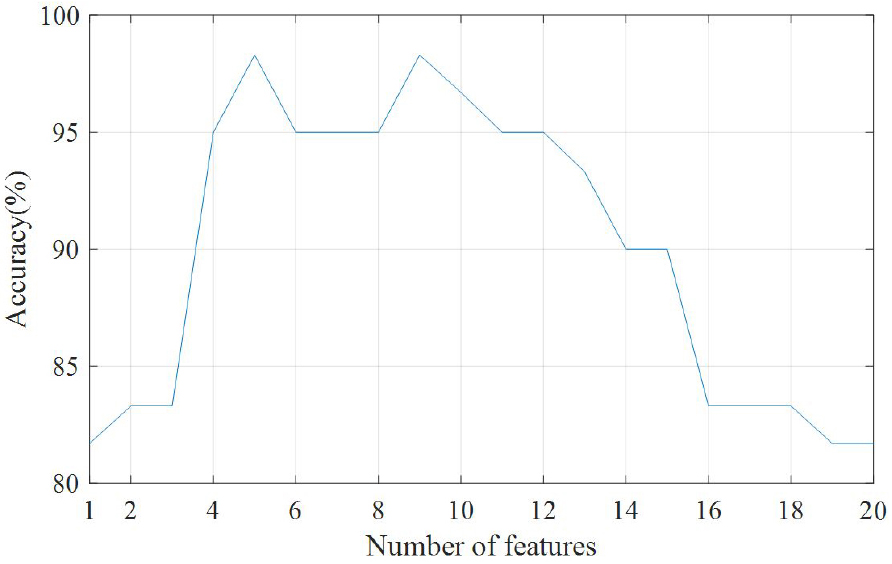
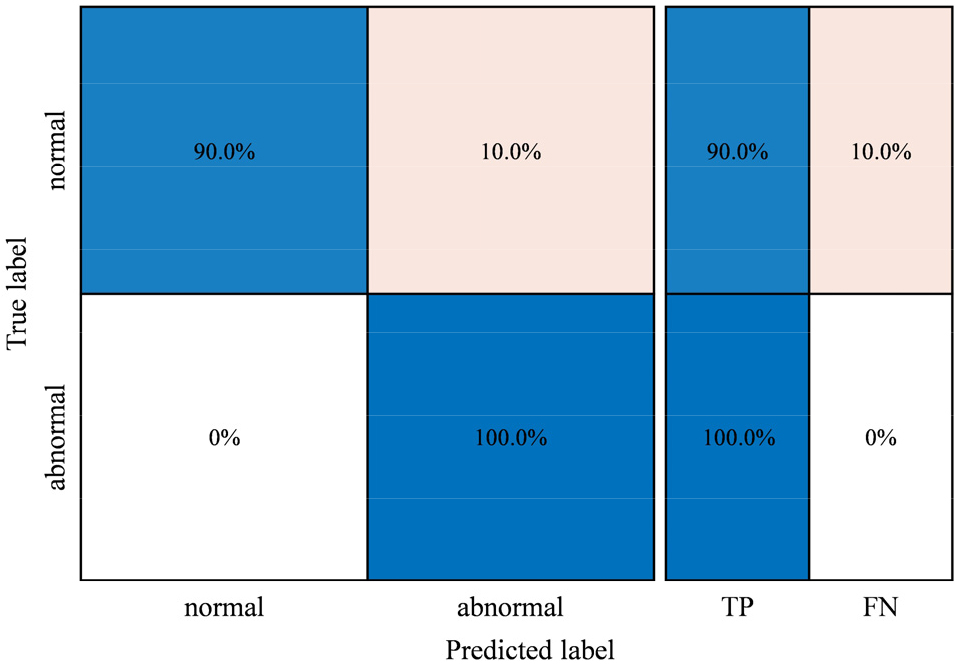
Fig. 7은 5개의 특징을 사용한 학습모델의 정오분류표다. 50개의 이상상태 특징을 이상상태로 올바르게 분류했으며 10개의 정상상태 특징 중 9개는 정상상태로 올바르게 구분했으며, 1개는 이상상태로 분류한 거짓음성(False negative)을 나타낸 것을 확인했다. 본 실험을 통해 시계열 데이터의 특징을 기반으로 한 기계학습을 통해 정상상태의 구조물과 이상상태의 구조물을 구분할 수 있음을 확인하였다.
3. 시스템 구축
3.1 하드웨어 구성
라즈베리파이 기반 구조물 건전도 모니터링 시스템을 구축하기 위해 Fig. 8과 같이 라즈베리파이에 가속도계, GNSS RTK 모듈, 경사계, LoRa가 연결된 방식으로 구성하였다. 가속도계, GNSS RTK 모듈, 경사계의 샘플링 주파수는 각각 200, 20, 100Hz이다.
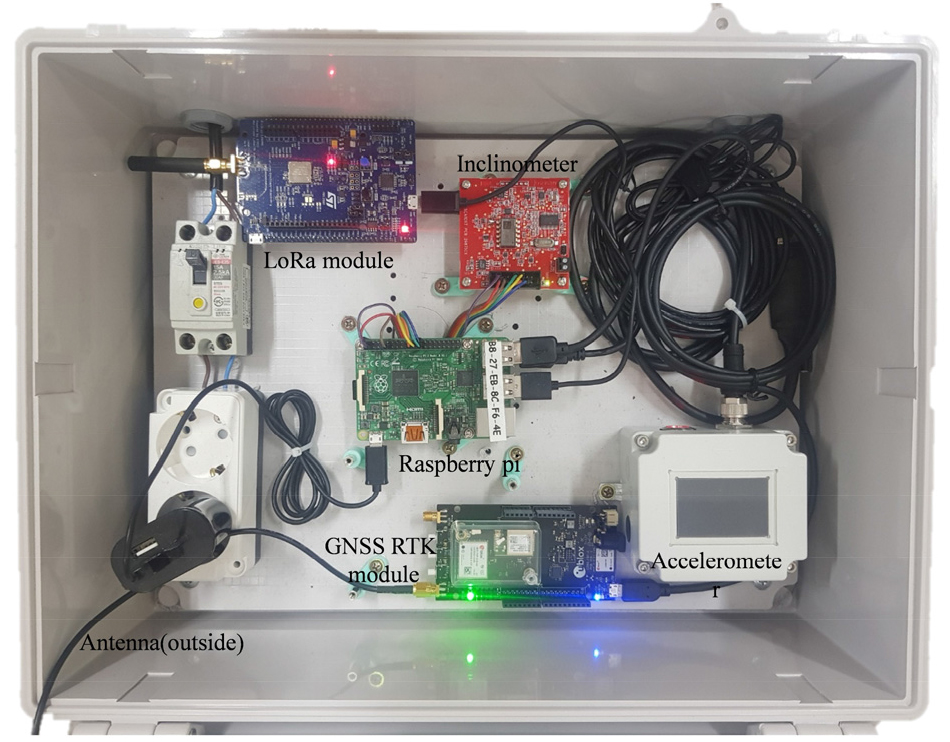
실건물에 설치하기 위해 국제보호등급 IP65 즉, 방수6등급 방진5등급의 인증을 보유한 폴리카보네이트 센서 케이스로 하우징하였다. 케이스 밑면에 각각의 장비가 볼트와 너트로 견고하게 고정되었으며 외부에서 인가되는 전원은 라즈베리파이에 연결된 후 나머지 장비들은 라즈베리파이에서 전력을 공급받는다. GNSS RTK 모듈의 안테나는 외부로 연결되어 위성신호에 방해가 없는 곳에 설치된다.
3.2 소프트웨어 구성
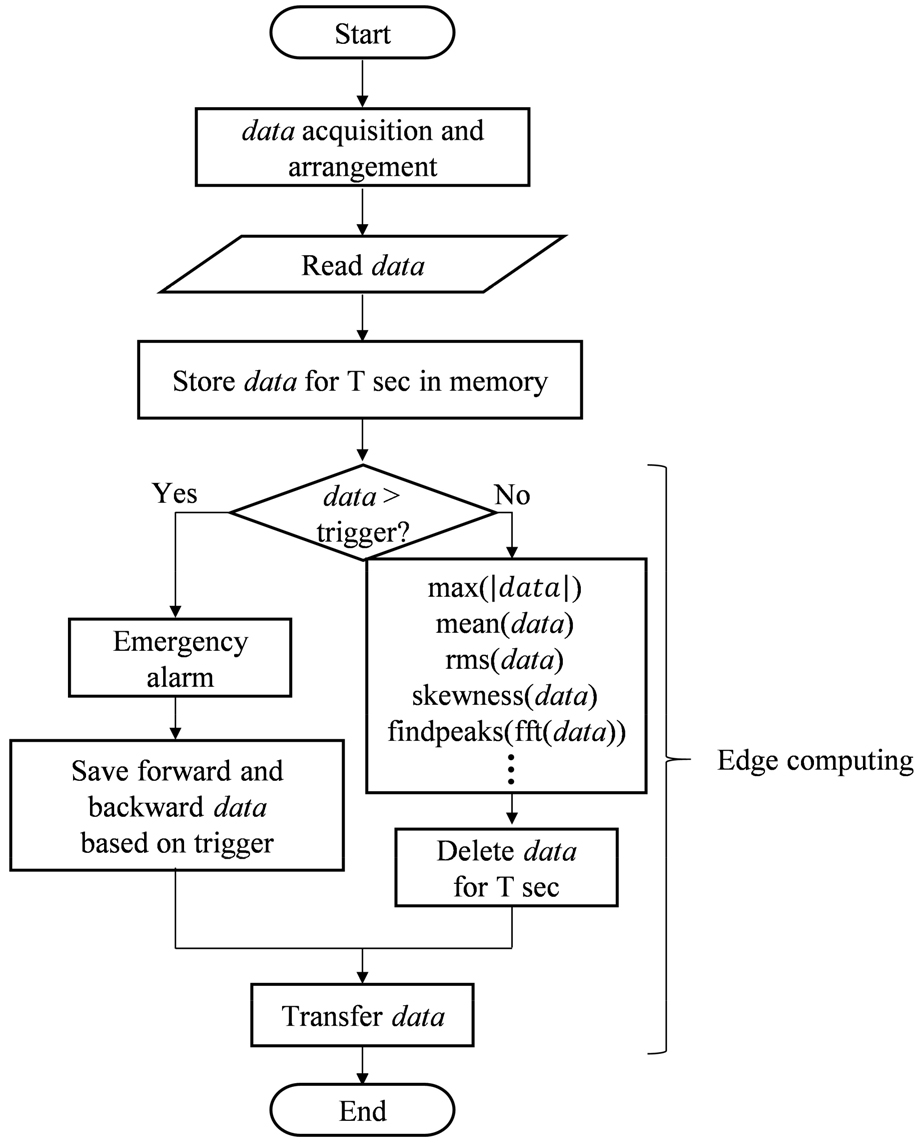
라즈베리파이에 탑재된 분산처리 알고리즘은 상시에는 분석된 동특성을 전송하며, 트리거(Trigger) 임계값을 기준으로 일정 임계값을 초과하면 위험이 발생했다는 경고를 전송하도록 구성되었다. 분산처리의 과정은 Fig. 9와 같이 라즈베리파이에서 센서 데이터를 획득하며 시작된다. 각 데이터를 메모리에 저장함과 동시에 저장된 데이터 값이 사전 설정해 놓은 트리거 임계값을 초과하는지 판단하고 초과하지 않을 경우, 저장 시간만큼 데이터를 수집한 후 수집된 데이터에서 동특성을 추출한다. 동특성을 추출한 후에는 메모리에 저장된 데이터를 삭제하며 추출된 동특성은 LoRa 모듈로 전송된다. 데이터 값이 임계값을 초과할 경우는 구조물에 외력과 같은 특이사항이 발생했음을 판단하고 즉시 알람 데이터를 생성하여 LoRa 모듈로 전송하고 데이터 값이 임계값을 초과한 지점으로부터 전, 후의 설정 시간만큼의 계측데이터를 모두 LoRa 모듈로 전송한다. 계측데이터는 데이터의 양이 많아 LoRa 통신으로 한번에 전송할 수는 없지만 일정 기간을 두고 연속적으로 데이터를 전송하며 최종 전송된 데이터는 계측데이터의 형식을 유지한다.
트리거 임계값은 Table 2와 같이 규정되어 사전 입력됐다. 가속도계의 가속도 값은 고유진동수는 행정안전부 국립재난안전연구원의 연구자료 ‘지진가속도 응답신호 특성 및 활용방안(Jang et al., 2011)’을 차용하여, 국내 구조물 설계기준에 근거한 1000년 재현주기 지진의 수준 및 2400년 재현주기 지진의 80% 수준으로 적용하였다. GNSS RTK 모듈의 최상층 변위와 경사계의 건물 기울기는 ‘안전점검 및 정밀안전진단 세부지침’의 구조물의 균열발생 한계 및 구조물의 경사도감지 수준 값을 적용하였다. 다만, 약 5.5m 미만의 저층건물의 GNSS RTK로 계측하고자 하는 최상층 변위 최소 기준이, 즉 1.1cm로 GNSS RTK의 최소 정밀도 1.112cm보다 낮아 변위 계측이 불가능하므로, 이 경우 경사계의 경사데이터로 최상층 변위를 유추한다. 각 센서의 트리거 임계값은 주의(Caution), 경계(Warning)의 단계로 나누었으며 임계값을 초과하지 않는 상시(Ordinary)의 경우 6시간마다 계측 데이터를 전송한다.
Table 2.
Alarm level to ordinary, caution and warning status
3.3 시스템 현장설치 및 데이터 취득
포항시 지진대책국 방재정책팀의 협조로 포항시 행정복지센터에 본 모니터링 시스템을 적용하여 데이터를 수집하였다. 북구 장성동 장량동에 위치한 행정복지센터 건물에 설치된 시스템 전경은 Fig. 10과 같다. 행정복지센터 1층 전산실에 LoRa 게이트웨이를 설치하고 옥상층 벽면에 센서 시스템을 설치하였으며 GNSS RTK 모듈의 안테나는 외부에 설치되었다.

LORIOT 서버로 6시간마다 전송되는 데이터는 가속도계의 x, y, z축, GNSS RTK의 x, y축, 경사계의 최댓값이며 가속도계의 데이터는 동특성 분석을 위해 23개의 동특성 데이터가 추가적으로 수집된다. 즉, 매 6시간마다 72개, 576byte의 데이터가 취득되는 것을 확인했다. 가속도계와 경사계의 x축은 건물의 약축 방향으로 설정하였다.
LORIOT 서버에서 2020년 2월 13일 00시부터 2020년 3월 13일 18시까지, 30일 동안 데이터를 추출했으며 Fig. 11은 가속도계의 x축에서 취득된 가속도 최댓값과 주파수 분석의 피크값 데이터다. 평균 8.3mg의 피크값과 5.4Hz의 주파수 값이 취득됐으며, 2회 발생한 피크값의 특이값은 타 센서에서 특이값이 발생하지 않았기 때문에 기계적, 환경적 요인에 의해 발생한 것으로 사료된다.
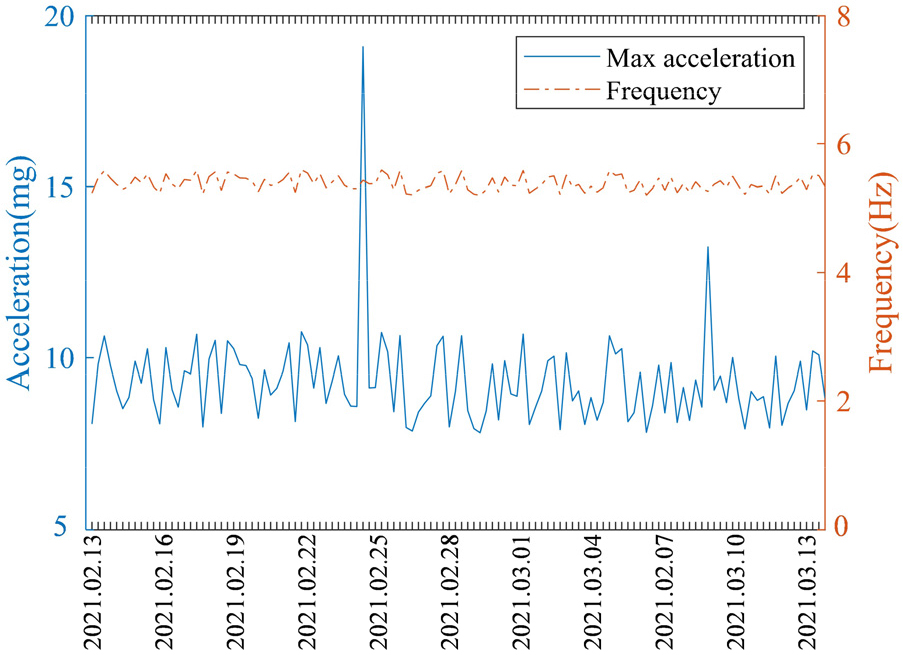
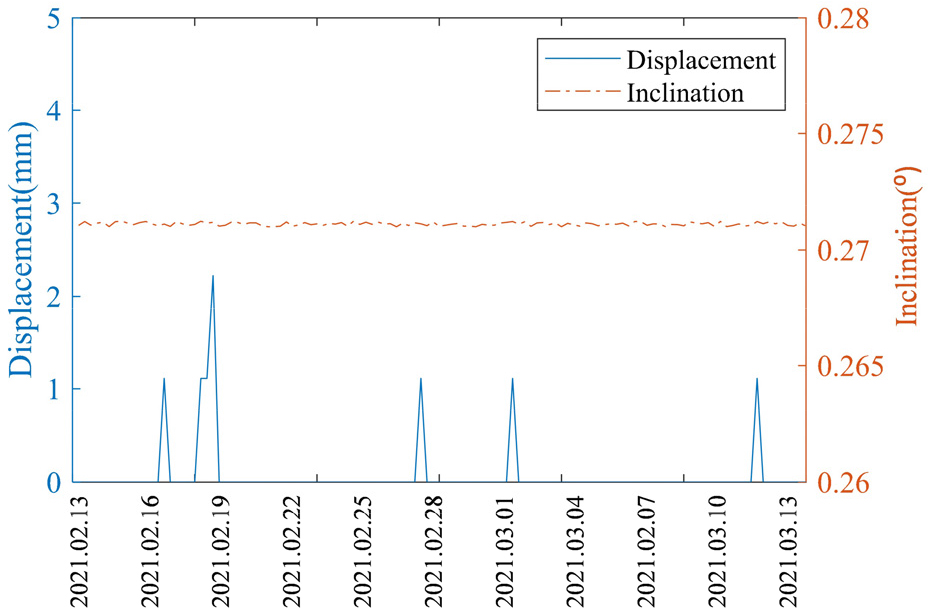
Fig. 12는 GNSS RTK 모듈에서 취득된 변위의 최댓값 데이터와 경사계의 x축에서 취득된 기울기의 최댓값 데이터다. GNSS RTK 모듈은 위도, 경도 데이터로 취득되기 때문에 x, y축 구분 없이 위도, 경도 데이터가 변위로 변환되어 취득된다. 계측기간 동안 대부분 변위가 0인 즉, 해상도 1.112mm 이내로 거동했음을 확인할 수 있다. 또한 GPS에서 5회 발생한 피크값은 경사계에서 특이값이 발생하지 않았기 때문에 GPS의 기계적, 환경적 원인의 오차로 사료된다. 최상층에서 발생한 변위는 앞에서 건물의 높이와 관계되어 의미를 갖는다. 경사계의 경우 설치 시 발생한 초기 값 0.27⁰를 기준으로 약 0.003⁰ 이내의 허용오차범위로 계측되었다.
4. 결 론
본 연구에서는 건물에서 장기간 취득되는 동특성을 앙상블 학습에 활용하여 건물에서 발생하는 이상을 감지하기 위해 라즈베리파이와 보급형 가속도계, GPS RTK, 경사계를 적용하여 장기간으로 건물의 모니터링이 가능한 무선 엣지 컴퓨팅 시스템을 구축하였다.
실험실 규모의 구조물 모형 진동실험을 수행하여 동특성 기반 앙상블 학습을 통해 이상상태의 구조물을 감지하였다. 실험을 기반으로 한 동특성 추출과 각 센서별 트리거 임계값을 설정하여 임계값을 초과했을 경우 알람 전송을 수행하는 실시간 분산처리 알고리즘을 라즈베리파이에 탑재하였다. 구성된 시스템을 하우징하고 포항시 행정복지센터에 설치하여 데이터를 취득함으로써 개발된 시스템의 현장 적용성을 검증하였다. 본 개발시스템의 활용적 측면에서 추후 현장설치된 시스템으로부터 취득되는 장기적인 특징 데이터는 앙상블학습을 통해 구조물의 이상을 감지하기 위한 빅데이터로 활용될 예정이다.
