

1 서 론
최근 구조물의 노후화에 따른 구조물 사용 중 발생할 수 있는 구조 열화 및 손상 파악 및 보수보강을 위한 안전진단 등 구조물 계측이 활발히 진행되고 있다. 콘크리트 구조물 표면에 발생하는 균열은 사용자에게 심리적인 불안감을 제공하며, 장기간 열려 있는 큰 폭의 균열은 구조물의 사용성능 및 내구성에 영향을 준다(Park et al., 2002). 따라서 콘크리트 구조물의 균열은 구조 열화 및 노후화의 척도로 구조손상 파악과 보수보강을 위한 모니터링 대상이 된다. 국내에서도 건축물을 포함한 시설물의 노후화에 따른 안전관리를 위해 구조열화가 심한 시설물을 특정 관리 대상시설로 지정하여 정기적인 현장점검을 실시하고 있다. 노후화 정도에 따라 연 2회의 현장점검이 필요한 중점관리 대상시설과 매월 1,2회의 매우 빈번한 현장점검을 수행하는 재난위험시설로 구분되어 관리되고 있다. 이와 같은 특정관리 대상시설물에 대한 정기적 현장조사의 대부분의 검사항목은 조사관에 의한 주요 구조부위의 균열정도에 대한 육안조사로 인력조사의 고비용성과 조사결과의 정확도 및 객관성 미흡 등 문제점이 대두되고 있다.
인력에 의한 균열점검 현장조사에 대한 대안으로 자동화 균열점검 기법에 대한 다양한 연구가 수행되고 있으며, 이에 대표적인 예로 카메라 촬영에 의한 균열영상 획득 및 영상분석에 의한 균열도 작성(Chen et al., 2006; Cha et al., 2017)을 들 수 있다. 국내외에서 수행된 카메라 영상기반 자동화 균열 분석기법은 주로 영상처리 알고리즘 개발에 관한 것으로 필터 링과 마스킹을 통한 영상사전처리기법(Adgikari et al., 2014), 중첩인식 및 형상검지기법(Lee et al., 2012)에 대한 연구가 주를 이룬다. 본 기법은 구조물 표면 이미지의 밝기나 선명도 등과 같은 사진촬영 환경에 큰 영향을 받으며, 2차원 영상분석의 한계상 얇은 얼룩 등에 대한 균열구분이 모호한 경우가 발생한다(Kang et al., 2002). 이와 같은 공학적 한계로 인해 영상기법(Kim et al., 2005)에 의한 균열조사는 제한된 정확도 문제가 대두되며, 현재 인력에 의한 육안조사를 대체하지 못하고 있는 실정이다(Takafumi et al., 2012).
균열과 같은 3차원 정보에 대한 2차원 영상분석기법의 한계는 3차원 스캐닝 기법으로 극복될 수 있다. Lidar(light detection and ranging)와 같은 레이저 계측장비를 기반으로한 3차원 스캐닝 기법의 근거리 적용 대안으로 제시된 광삼각법(triangulation method; Kwon, 2001)은 대상물체에 주사된 라인 레이저(line laser)의 디지털카메라 영상을 분석을 통해 3차원 스캐닝을 수행하는 기법으로 문화재 복원분야 등에서 활발히 적용되고 있다. 본 연구에서는 경제적인 근거리 3차원 스캐닝 기법인 광삼각법을 활용하여 콘크리트 구조물 표면의 균열정 보를 획득하는 자동화 기법을 개발하고자 하였다. 콘크리트 균열의 특성상 표면 단절과 같은 3차원 특성을 정확하게 파악 할 수 있는 본 스캐닝기법을 통해 균열파악의 정확도를 높여 자동화된 균열정보 획득이 가능함을 실험적으로 증명하였다.
2 광삼각법 기반 콘크리트 균열 탐지 하드웨어
2.1 라인 레이저
레이저는 높은 에너지 준위에 많은 원자가 머물러 있다가 외부자극에 의하여 강력한 상호작용을 하면서 동시에 낮은 에너지 준위로 떨어질 때 그 차이에 해당하는 에너지를 빛으로 방출하는 현상을 기반으로 한다. 레이저 발진을 일으키기 위하여 레이저 매질의 양단에 반사거울을 설치하고, 그 빛이 이 사이를 무수히 왕복하면서 증폭되는데 증폭이 손실보다 크면 발진을 일으키게 된다. 이 때, 한쪽 거울은 100% 반사 하도록 만들고 반대쪽 거울에서는 일부분의 빛이 투과하도록 만들면 발진된 빛의 일부가 밖으로 나오게 되므로 레이저빔을 얻을 수 있다.
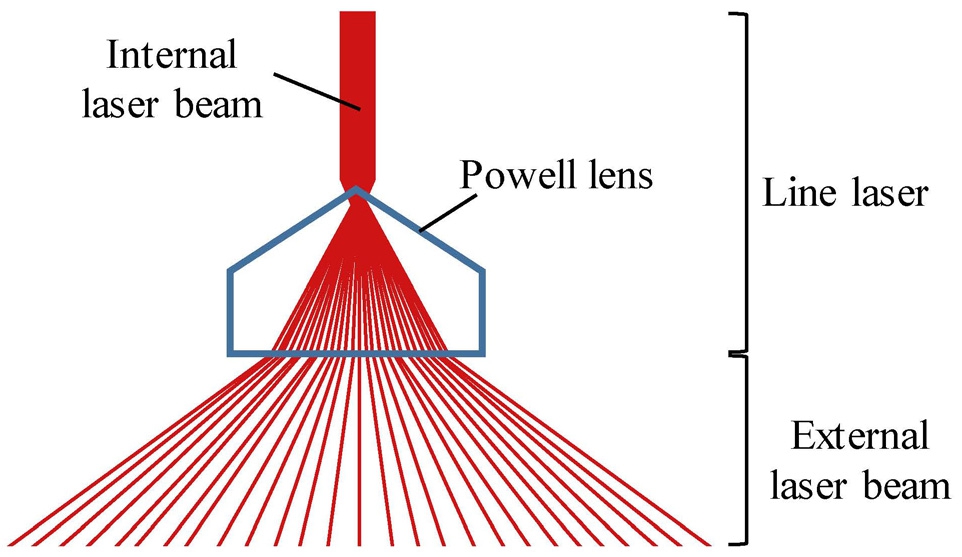
라인레이저는 Fig. 1과 같이 일반 레이저의 발진부에 포웰 렌즈(powell lens)로 알려진 레이저 라인 생성기 렌즈를 삽입 하여 레이저가 발진을 일으킬 때 빔을 사방으로 펼쳐 생성된 균일한 레이저 라인을 말한다. 라인레이저는 레이저빔의 형태에 따라 가우시안 라인(gaussian line)과 비가우시안 라인(nongaussian line)형태로 나뉘게 된다. 가우시안 라인은 원통형 또는 실린더형 렌즈를 사용하여 조준(collimation) 빔의 한방 향에 대해서만 집광후 퍼뜨리게 된다. 한편 비가우시안 라인은 어떤 렌즈로 입사되는 가우시안 프로파일 빔의 세기가 높은 가운데 부분을 굴절률이 크게 만들어 멀리 굴절시키고 상대적 으로 세기가 낮은 외각부분을 굴절률이 낮게 만들어 균일한 빔의 세기를 유지하는 라인레이저로 우수한 직선성으로 인해 본 연구에서 활용하였다.
2.2 시스템 개요
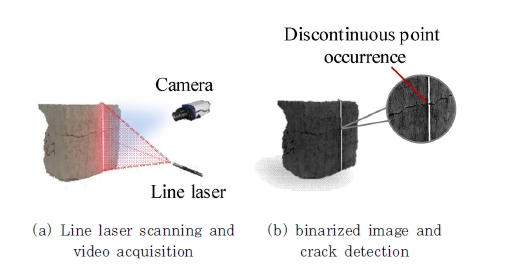
균열이 있는 콘크리트 표면에 라인레이저빔을 주사하면 균열의 음각에 레이저빔이 도달하지 못하여 불연속점이 발생 한다. 라인레이저를 이동시키면 연속된 불연속점이 발생하고 이를 영상으로 촬영하고 분석하여 균열을 검출한다. 영상분석은 두 가지 단계로, 단일프레임 단위에서 콘크리트의 균열점이 되는 라인레이저빔의 불연속점을 검출하고, 연속프레임으로 확장하여 균열점을 조합하여 최종 균열도를 생성한다.
라인레이저빔의 불연속점 획득의 세부적인 과정은 다음과 같다. Fig. 2(a)와 같이 콘크리트 구조물 표면에 라인레이저 빔을 주사한 후 카메라를 통해 라인레이저빔이 포함된 영상을 획득하고, Fig. 2(b)와 같이 이미지의 흑백화와 설정된 임계 값에 의한 이진화(Paul et al., 2002; Cho et al., 2014) 작업을 수행하여 이진화된 이미지 데이터로부터 라인 레이저 빔의 불연속점을 검출한다. 검출된 불연속점은 콘크리트 표면의 균열점이 되고 균열점의 크기 및 위치를 파악하는 작업이 수행 된다.
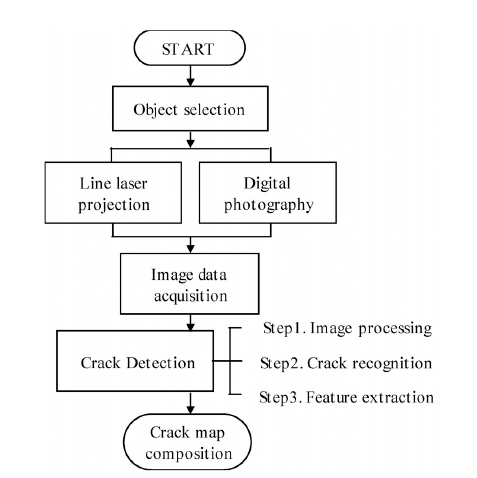
연속프레임 단위에서 영상분석은 단일프레임으로부터 축적된 균열점을 조합하여 균열형상을 결정한다. 이 때, 수치모델이 존재하지 않아 역학적으로 해석이 불가능한 균열의 형상을 결정하기 위해 균열의 진행 특성을 활용하여 개발된 균열인식 알고리즘이 적용된다. 균열인식 알고리즘을 통해 형상이 결정 된 균열은 위치, 폭, 각도, 방향성 등의 정보를 포함하는 균열도 작성에 활용된다. 상기의 모든 과정을 순서도로 나타내면 Fig. 3과 같다.
3 균열도 작성 알고리즘
3.1 균열점 추출을 위한 단일프레임 영상처리 및 분석
Fig. 4는 단일 프레임의 이미지 처리 및 분석 작업 과정이다. 우선, 라인레이저빔의 효율적인 데이터 추출을 위해 이미지의 RGB 픽셀 정보 중 레이저의 파장인 650nm과 가까운 적색성 분 정보만 취한 후 이를 흑백(gray scale) 영상으로 변환한다 (Cho et al., 2014). 영상변환 과정에서 촬영환경과 라인레 이저빔의 번짐 등으로 인한 노이즈를 감소시키기 위하여 평균 필터(mean filter)를 적용하고 이진화한다(Otsu, 1975). 이진화된 이미지 데이터에서 라인레이저 부분의 픽셀은 1의 값을 취하고 흰색으로 표현된다. 반면에 라인레이저 외의 나머지 부분은 0의 값, 검정색으로 표현된다. 이 때, 흰색으로 표현된 라인레이저빔이 끊기고 검정색으로 표현되는 부분이 균열이다.
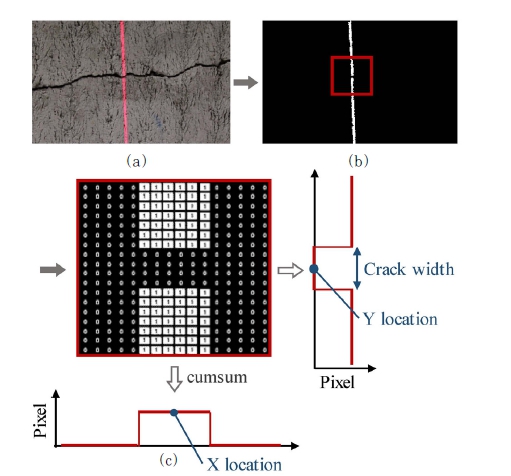
Fig. 4.
Image processing of crack location detection (a) Single frame extraction (b) Binarization (c) Crack size measurement
최종 균열도 작성에 활용될 균열점의 위치와 크기 데이터를 획득하기 위해서 X , Y 축을 기준으로 각각의 픽셀의 누적합 (cumsum)을 취한다. X 축 방향으로의 누적합은 라인레이저 부분만 0이 아닌 값을 갖고 이 값의 중심점이 X 축 위치정보가 된다. Y 축 방향으로의 누적합은 균열부분만 0의 값을 갖고 이 값의 중심점이 Y 축 위치정보, 0의 값을 갖은 픽셀의 수가 균열의 폭 정보가 된다.
3.2 균열인식 알고리즘이 적용된 연속프레임 영상분석
단일 균열일 경우 영상 전체의 연속프레임에서 추출된 균열 점의 위치정보들을 단순 연결하면 균열형상을 획득할 수 있지만 균열이 분열되거나 2개 이상의 균열이 있을 때는 앞의 균열점이 뒤의 어느 균열점과 연결될 것인가를 판단하고 균열의 진행 방향을 파악할 균열인식 알고리즘이 적용된다. 균열인식 알고 리즘의 기본 전제는 임계값을 부과하여 균열점과 균열점을 연결하며 균열점 사이의 거리가 일정치의 임계값을 초과하면 다른 균열로 인식하는 것이다. 다만, 3개 이상의 균열점들이 임계값 이내에 인접한 경우에는 조건 알고리즘을 적용한다.
Fig. 5는 균열 인식을 위한 영상 처리 및 분석이 완료된 6개 프레임의 균열점으로부터 균열을 인식하는 알고리즘을 시각화 하였다. 각각의 균열점은 이미지 평면상에서 픽셀임과 동시에 좌표를 갖고 있어 좌표값을 통해 직선거리가 도출될 수 있고 프레임을 순차적으로 분석하며 임계치 내의 균열점을 연결한다. 1번 프레임에서는 한 개의 균열점, 2번 프레임에서 두 개의 균열점이 있지만 두 균열점의 거리가 임계치를 초과하여 서로 다른 균열로 인식되고 시작점이 다른 두 개의 균열 인식이 진행 된다.
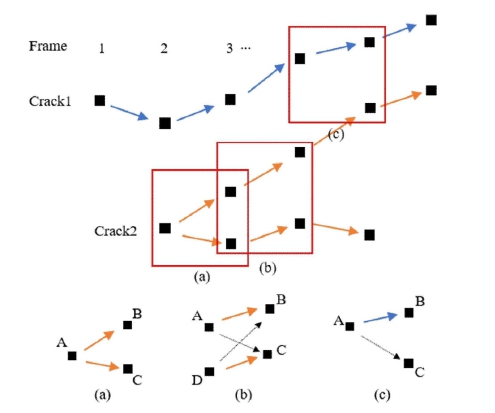
다음은 균열을 인식하는 조건 알고리즘의 세 가지 케이스다. Fig. 5(a)와 같이 한 개의 균열점에서 두 개의 균열점이 임계치 내에 발생한 경우에는 균열이 분리된 것으로 판단되어 균열의 분기점으로 인식되었다.
Fig. 5(b)는 2개의 균열점에서 또다시 2개의 균열점이 발생된 경우다. A와 D는 각각 균열이 분열되어 서로 다른 균 열점으로 이어져야 하지만 둘 다 B와 C가 임계치 내에 있어 A와 D 둘 다 B와 C로 균열이 분열되는 것으로 잘못 판단될 수 있다. 이와 같이 n개의 균열점이 발생한 뒤 다음 프레임에서 임계치 내에 또다시 n개의 균열점이 발생할 경우 서로 다른 균열로 인식한 뒤 최단거리가 균열의 경로로 설정된다.
Fig. 5(c)는 Fig. 5(a)와같이 단일 균열점에서 두 개의 균열점이 발생하였지만 분열로 인식되지 않아 A에서 C로 연결 되지 않았다. 이는 마코프 사슬(markov chain)이론(Rafael et al., 1987; Baum, 1972)이 도입된 결과다.
마코프 사슬 이론이란, 시간 t에서의 관측이 t - r의 상태에 의존하는 것으로 r=0이면 과거 상태로부터 독립적이고 r=1 이면 바로 이전의 상태만 고려하고 r=2이면 이전 두 개의 상태를 고려하여 현재의 관측을 결정하는 것이다.
균열 인식에 마코프 사슬 이론을 도입하면 시간 t는 현재 프레임이 되고 r은 이전 프레임이 되고 r이 2 이상일 경우 균열의 직진성을 고려하여 발생되어 온 진행 경로의 각도가 된다. 다수의 균열점이 임계치 내에 인접하여 균열의 연결이 모호할 경우 이전 프레임의 균열점과 현재 프레임의 균열점이 이루는 각도가 다음프레임의 균열점과 180도에 가까운 점을 균열의 방향으로 인식한다. 이와 같이 Fig. 5(c)의 A는 이전 프레임의 균열점과의 각도를 고려하여 B로 연결되고 C는 다른 균열로 인식되었다.
상기 알고리즘들은 각각 가중치를 부여받아 매 프레임의 균 열점마다 모든 조건을 고려하여 가중치가 곱해진 값을 비교하고 값이 가장 큰 방향으로 연결되어 최종 균열 형상을 구성한다.
3.3 균열 특성 분석 및 균열도 작성
균열인식 알고리즘을 통하여 개별의 균열로 인식된 균열을 Fig. 6과 같이 각각의 균열로 분류하여 균열의 특성인 길이와 각도, 폭 등의 특성을 구할 수 있다. 균열의 길이는 각 균열을 구성하는 균열점을 이용한다. 각 균열이 포함하는 n개의 균열 점의 간격을 각각 구한 뒤 이를 합산하면 단순 이미지만을 분석하여 균열의 길이를 구하는 기존의 방법보다 더 정확한 균열의 길이를 획득할 수 있다. 균열의 길이를 계산할 때에는 카메라 화소의 개수와 단일 픽셀의 크기로 스케일 팩터(scale factor)를 고려하여 길이단위인 mm로 변환하여 계산한다. 균열의 각도는 균열의 시작점과 종료점을 추출하여 각도를 계산하고 균열의 폭은 단일프레임 영상처리 및 분석 과정에서 각 균열점마다 저장된 정보를 활용한다.
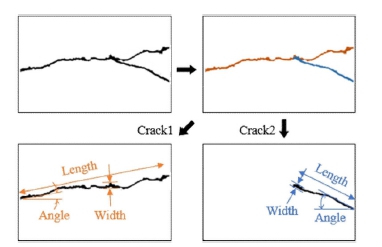
최종적으로 작성된 균열도는 콘크리트 표면의 균열을 단순 이미지정보로 제공하는 것이 아니라 다수의 균열을 세분화 하여 각 균열의 길이, 각도, 폭 등의 정보를 포함하고 있고 상기 모든 과정은 자동화되었다.
4 실험 및 검증
4.1 실험 및 균열 검출
본 실험을 위한 라인레이저는 Freecon사의 HLNC 650-16 의 두께가 일정한 비가우시안 라인 레이저이고 성능은 Table 1과 같다. 영상 센싱을 위한 디지털 카메라는 Canon사의 700D가 사용되었고 이의 이미지센서의 크기는 22.3×14.9mm이며, 2592×1728pixel의 450만 화소 영상을 획득하였다. 균열 생성 을 위해 Fig. 7과 같이 W1800mm×H300mm×T120mm의 철근콘크리트 실험체를 제작하여 4점 가력 실험을 실행하였다. 양 끝 아래에 2개의 지지점을 두고 위쪽 중심부의 2점에서 가력하여 중심부에는 전단력이 발생하지 않고 휨응력만이 발생 하여 휨균열이 생성되었다. 균열 발생 후 라인레이저 스캐닝과 동시에 비디오 촬영을 통한 30개의 이미지 프레임을 추출하여 균열점 획득을 위한 단일프레임 영상 처리 및 분석을 하였다. 또한 균열인식 알고리즘을 적용하는 연속프레임 영상처리를 통하여 각기 다른 균열을 인식하고 균열 형상을 구성하였다. 상세 과정은 다음과 같다.
Table 1
Line laser specification
| Optical power | <16mW | Operating voltage | 7~24VDC |
| Wave length | 655nm | Operating current | <60MA |
| Beam angle | 45 ° | Operating temp | -10 °~50 ° |
| Beam size | <0.1mmat 300mm | Storage temp | -40 °~85 ° |
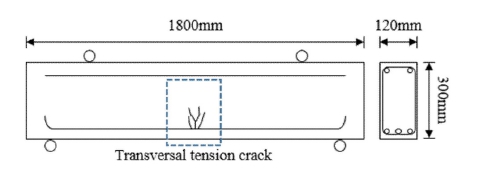
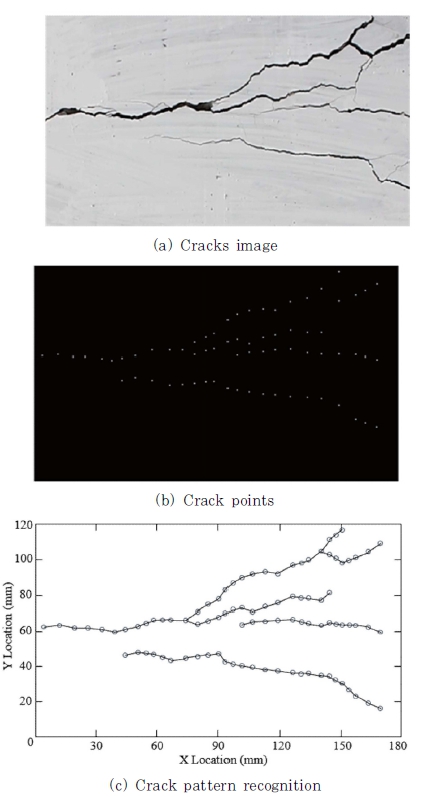
Fig. 8(a)와 같이 휨균열이 발생한 실험체에 레이저를 주사 하여 촬영한 후 30개의 이미지 프레임을 추출하여 Fig. 8(b)와 같이 균열점을 생성하였다. Fig. 8(c)는 본 연구에서 제안한 균열 인식 알고리즘을 적용하여 균열점으로부터 균열의 형태와 방향성을 추출해낸 결과이다. 이는 균열의 형태만 인식할 수 있을 뿐만 아니라 균열인식 알고리즘 과정에서 균열이 자동으로 세분화되었고 추후 균열도를 작성에 활용되어 균열의 특징을 정확하게 파악할 수 있었다. 검출된 균열 형상인 Fig. 8(c)와 원본 이미지 Fig. 8(a)를 비교했을 때 정확한 균열의 형상을 보여주는 것은 본 연구에서 개발된 알고리즘의 높은 신뢰성을 증명한다.
4.2 균열 특성 분석 및 균열도 작성
균열인식 알고리즘을 통해 균열들은 Fig. 9(a)와 같이 5개로 자동으로 분류되었고 개별의 균열로 분리되어 특성이 분석되 었다. 균열의 폭은 최소 0.35mm부터 최대 5.23mm까지 측정 되었고, Fig. 9(b)와 같이 각 균열별, 위치별로 폭 데이터가 저장되도록 하였다. 0.3mm이하의 미소균열은 검출되지 않았 는데 카메라의 해상도를 키우거나 카메라와 실험체의 간격을 줄여 해결할 수 있다.
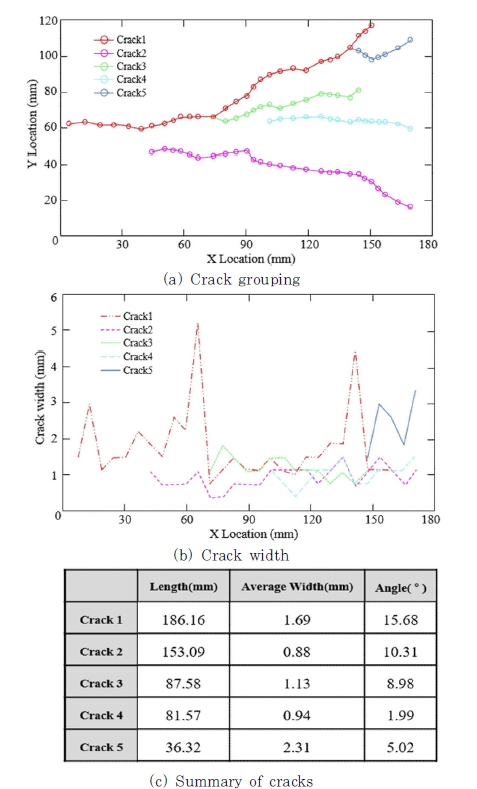
길이와 각도, 평균폭 등의 특성은 Fig. 9(c)와 같이 표로 정리됨으로써 최종적으로 Fig. 9(a)~(c)와 같은 균열도가 생성된다.
균열도는 균열의 형상 및 방향성의 시각정보만 제공하는 것이 아니라 균열이 세분화되고 각 균열의 특성을 제공하여 추후 부재력에 영향을 줄 만한 균열을 검출하고 형상과 위치, 크기를 파악하는데 활용될 수 있다.
4.3 프레임 개수에 따른 균열 인식 검토
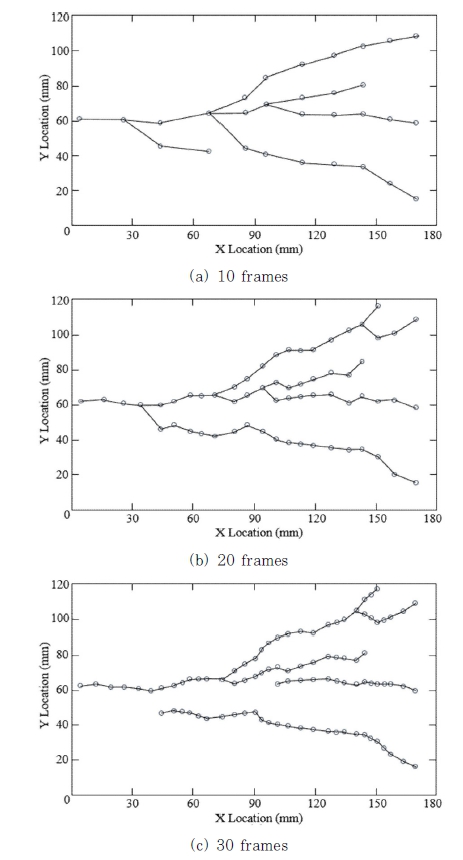
균열인식 알고리즘을 구현하고 수정하는 과정에서 오류의 대부분이 현재 프레임과 다음 프레임에서 균열점의 수가 증가 하거나 감소할 때 발생하는 것을 확인하였고 균열인식의 정확 성을 파악하기 위해 영상의 프레임 수를 조정해가며 실험하였다.
Fig. 10(a)~(c)와 같이 총 프레임의 개수가 10개, 20개, 30개일 때 균열의 형상을 비교하였고 프레임의 수가 클수록 즉, 라인레이저의 센싱 간격이 짧을수록 더욱 정확한 균열의 패턴을 인식하는 것을 확인하였다. 이는 분기점에서 임계값을 설정할 때 다음 균열이 새로 시작하는 균열인지 이전 균열과 나누어지는 균열인지 판단이 명확하지 않아 발생된 오류인 것 으로 판단된다. 반면에 균열 점의 거리가 짧을수록 임계값이 명확해지므로 프레임 개수를 높여 정확도를 향상시킬 수 있음을 확인하였다.
5 결 론
본 연구는 라인레이저를 이용한 자동 균열 검출 시스템개발에 관한 연구로서, 다음과 같은 결론을 도출하였다.
1) 균열이 존재하는 콘크리트 표면에 레이저를 주사한 후 3차원 형태의 영상을 분석하여 균열 위치를 파악할 수 있다.
2) 추출된 균열의 위치를 파악하여 균열의 특징을 분석하면 균열의 방향과 형태를 자동으로 파악할 수 있다.
3) 프레임 이미지의 개수를 다르게 선정하여 알고리즘에 적용시킨 결과 프레임의 수가 많으면 많을수록 실제 균열 영상과 더 일치함을 확인할 수 있었다.
4) 균열의 특징과 형태를 파악한 후 도출된 결과로부터 균열의 길이, 방향 및 각도 등의 균열 정보를 추출할 수 있었다.
5) 균열의 길이와 각도 폭은 mm당 치환되는 픽셀의 값 즉, 카메라 해상도에 영향을 받으므로 해상도가 좋을수록 객체와 카메라의 거리가 짧을수록 더욱 정확한 균열도를 작성할 수 있다.
6) 본 연구는 균열 추출의 자동화에 목적을 두었으며 인력과 비용의 낭비를 절감시키고 시설물 안전성 평가의 현행 균열 조사방법의 한계를 극복할 수 있을 것으로 사료된다.
본 논문에서 검증된 결론을 통하여 균열의 형태와 특징을 분 석한 결과 다음과 같은 항목의 추가 연구가 향후 필요하다.
