1. 서 론
2. 본 론
2.1 1차원 보의 거동 모사
2.2 유한요소 방정식 유도
2.3 고유치 해석
2.4 축계 시스템 해석 및 최적설계 과정
2.5 수치예제 결과 및 고찰
3. 결 론
1. 서 론
회전익기에서는 구조물 및 핵심 부품에 대한 경량화가 필수적이다. 특히 엔진에서부터 로터로 동력을 전달하는 축계의 경우 충분한 회전력을 전달하면서 경량설계가 이루어져야 하는 필수 부품이다. 이러한 축계시스템은 동력을 전달하는 것을 넘어 회전에 의한 동적거동에 대한 안정성도 가져야 하고, 축 정렬오차 등의 발생은 동적거동에 영향을 미칠뿐만 아니라 기어박스의 수명에도 치명적이기 때문에 설계 시에 이러한 요소들을 충분히 고려해야 한다.
3차원 유한요소법은 기계요소의 설계 및 해석에 일반적으로 많이 활용되고 있다. 하지만, 3차원 형상의 경우 요소망을 나누는 것에 시간이 많이 요구되며 특히, 고유치 해석과 같은 동적거동 해석에는 계산 비용이 많이 드는 단점이 있다. 회전 축계의 경우 형상이 단순하고, 길이에 비해 단면의 크기가 작기 때문에 3차원 유한요소법을 사용하는 것보다는 1차원 보 요소를 가지고 해석과 설계를 수행하는 것이 계산 비용 측면에서 합리적이다. 특히, 축계와 같이 동적거동을 필요로 하는 요소부품에는 1차원 보 요소를 활용하는 것이 일반적이다 (Friswell et al., 2010).
Nelson and McVaugh 등(1976)은 1차원 오일러 보 요소(Euler-Bernoulli Beam)를 사용하여 회전 축계에 대한 동적 거동해석을 수행하였다. 축계의 동해석에서 디스크요소의 불균일 질량을 고려하여 회전시에 자이로스콥 효과(gyroscopic effect)를 고려하였다. Saavedra와 Ramírez(2004)는 회전 축계 사이에서 회전에 대한 강성을 고려하여 회전 축계의 축 정렬오차를 고려한 1차원 축계 요소를 개발하고 검증하였다. Friswell 등(2010)는 축계에서 디스크뿐만 아니라, 베어링, 플랜지 등 축계 거동에 영향을 미치는 요소들을 모델링하고 1차원 보 요소에 이를 반영하였다.
대부분의 축계 시스템에서 축의 길이는 고정되어 있기 때문에 축계 경량화를 위해서는 축의 반경과 두께만을 조절할 수 있다. 축의 반경과 두께는 주어진 토크에 대해서 충분한 비틀림 강성을 가져야 하며, 뿐만 아니라 회전익기의 축계는 로터 및 기어 등의 동력전달 장치로부터 오는 가진과 축의 회전을 고려한 동적 안정성이 확보되어야 한다(Headquarters, U.S. Army Material Command, 1974).
본 논문에서는 1차원 보 요소를 활용하여 축계의 비틀림 강도를 평가하고 이를 기반으로 축의 중량이 최소가 되도록 최적설계를 수행하였다. 축계 해석에는 베어링 지지 강성과 플랜지의 질량 요소를 고려하였다. 회전축계의 동적 안전성을 확보하기 위하여 고유치 해석을 수행하여 축의 1차 모드가 임계속도와 최대 거리가 되도록 최적화를 진행하였다. 이때, band-gap 설계에서 사용하는 특정 모드(여기서는 임계속도 및 기어 가진)를 회피할 수 있도록 목적함수를 정하여 최적화를 진행하였다(Sigmund and Jensen, 2003). 주어진 1차원 보 요소를 이용하여 최적설계를 한 결과를 3차원 유한요소 모델과 실제 제작된 축계의 시험결과와 비교하여 제안된 방법을 검증하였다.
2. 본 론
이 장에서는 1차원 보의 유한요소 정식화와 동적거동 해석을 위한 고유치 문제, 정식화와 동적 안정성을 확보하면서 축계 중량을 줄이기 위한 최적화 기법을 소개하고자 한다.
2.1 1차원 보의 거동 모사
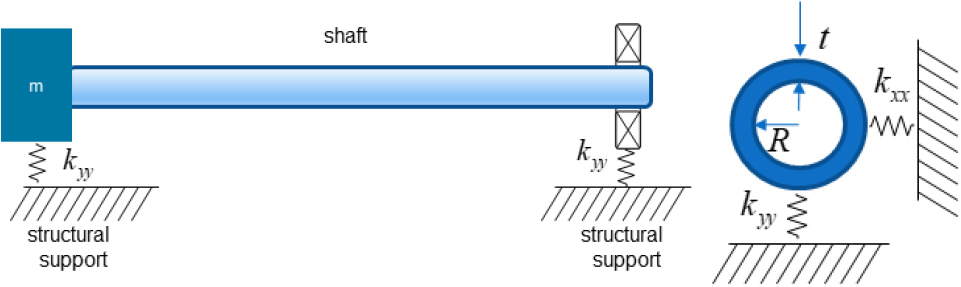
1차원 보 요소는 전단 변형을 고려하지 않는 오일러 보 요소를 고려하였다. 고려하고자 하는 축계 시스템 모델은 Fig. 1과 같다. 축의 내반경을 , 두께를 로 나타내며, 와 는 지지부에서의 - 그리고 - 방향의 강성을 나타내며, 베어링부의 강성이 여기에 해당된다.
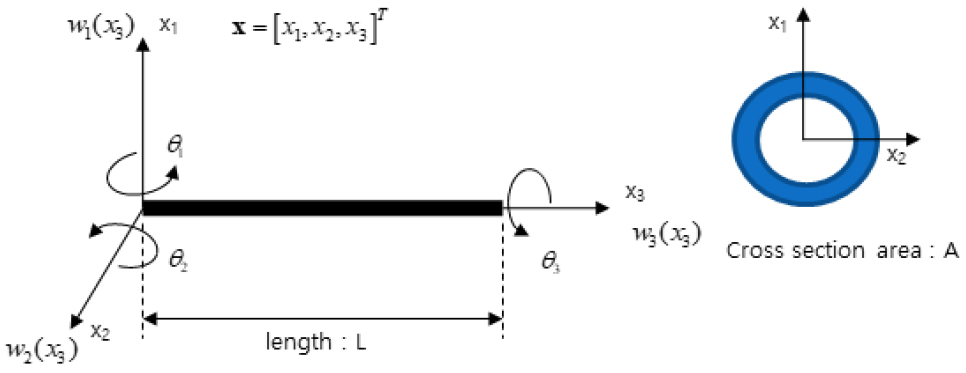
1차원 보 요소의 기본 성분은 축 방향과 굽힘 방향, 그리고 비틀림 방향 성분의 질량과 강성이 있다. 이러한 성분을 정의하고, 축의 거동을 모사하기 위해 Fig. 2와 같이 좌표계를 정의한다. 축계의 거동은 , 그리고 방향의 변위를 다음과 같이 나타낼 수 있다.
여기서, 그리고 은 축방향 위치 에서의 , 그리고 방향의 변위를 나타내며, 그리고 축방향 위치 에서의 , 그리고 방향에 대한 회전을 나타낸다. 전단변형을 고려하지 않는 오일러 보 요소는 다음과 같은 관계식을 만족한다.
2.2 유한요소 방정식 유도
축 방향 변위와 비틀림 거동에 대한 유한요소 모델링을 위해서는 변위와 회전에 대해서 1차 형상함수를 이용해 보간한다. 하지만, 식 (2)와 같이 주어진 전단변형을 고려하지 않는 에르미트(Hermite) 보간을 해야 하며 이 경우는 2차 형상함수를 사용해야 한다. 각 거동에 대해서 운동에너지와 포텐셜에너지를 계산하고, 변분을 통해 평형방정식을 계산한 후 보간된 변위와 회전식을 각각 축변형, 비틀림, 굽힘에 대한 평형방정식에 대입하면, 유한요소 이산방정식을 구할 수 있으며 이 식은 질량과 강성 행렬로 표현된다. 축방향 성분, 비틀림 성분 그리고 굽힘성분에 대한 질량과 강성 행렬식은 다음과 같이 표현된다(Friswell et al., 2010).
여기서, 는 요소의 밀도, 는 요소의 단면적, 과 각각 요소의 탄성계수와 전단탄성계수 은 극관성모멘트로 로 계산되며, 는 단면 2차 모멘트를 나타낸다.
1차원 보 유한요소 모델에서는 축의 플랜지 질량 그리고 베어링, 구조 지지부 등의 강성을 특별한 모델링없이 해당 노드에 부과할 수 있다(Fig. 1). 특히, 베어링이 강성과 감쇠성분을 가질 경우 Fig. 3와 같이 정의된 지지 요소를 적용할 수 있다(Friswell et al., 2010).
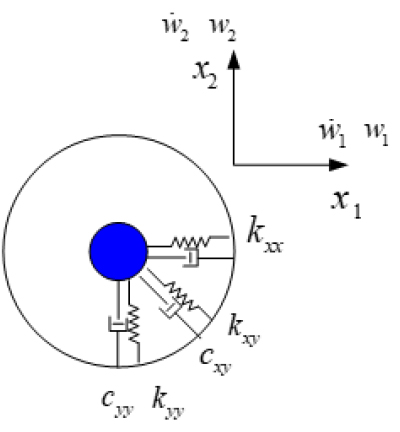
Fig. 3와 같이 모사된 축계 지지요소는 다음과 같은 식으로 표현 할 수 있다.
여기서, 행렬 와 는 각각 지지부의 강성과 감쇠 계수 행렬이며, 와 는 과 방향의 속도 성분이다. 본 연구에서는 지지부에서 속도 감쇠를 고려하지 않으면서() 전단지지가 되어 있지 않는() 등방성지지 요소(isotropic constant stiffened support elements)를 고려하기로 한다. 식 (3), (4), (5), (6)를 이용하여, 최종 유한요소 방정식은 다음과 같이 표현할 수 있다.
는 플랜지의 질량이며, 는 각 요소의 자유도 를 모은 전역 자유도(global degrees of freedom)이다. 상첨자 는 시간에 대한 2차 미분을 말하며, 는 가속도이다.
2.3 고유치 해석
축계 시스템이 구조 안정성을 확보하기 위해서는 축계의 고유진동수가 입력되는 여러 가지 가진(로터 회전수, 기어치 가진 등)을 회피하도록 하여야 한다. 이를 위해서 고유치 해석을 수행해야 하며, 고유치 해석 문제는 다음과 같이 정식화 할 수 있다.
여기서, 변위 는 조화거동(Harmonic motion)을 가정하여 라 가정한다.
2.4 축계 시스템 해석 및 최적설계 과정
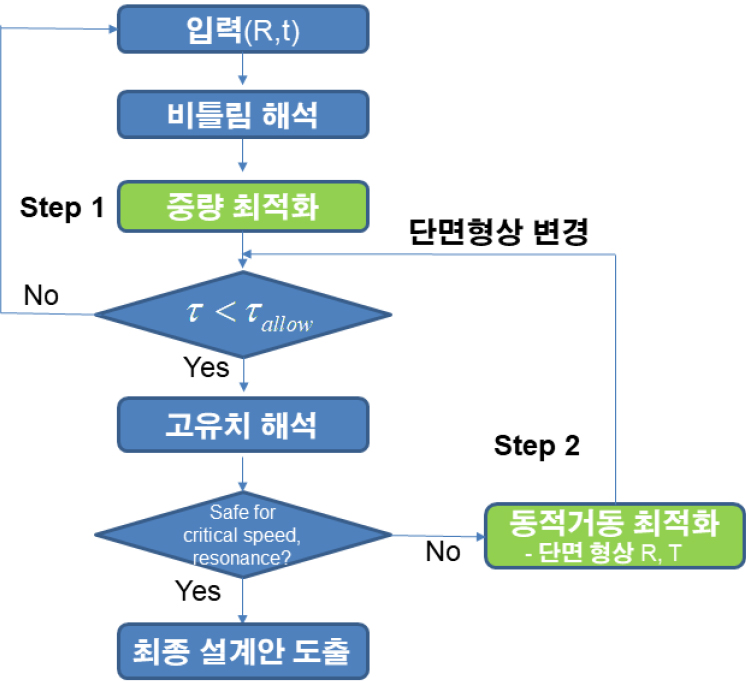
축의 최적화는 2단계로 나누어서 진행한다. 1단계에서는 축의 중량을 최적화 하며, 2단계에서는 최적화된 중량을 가지는 축이 입력 가진에 의한 임계속도(Critical speed)를 최대한 회피할 수 있도록 동적거동에 대한 최적화를 진행하였다. 이 때 구조설계 시 특정 주파수 영역대의 음압 또는 음향 에너지를 차단하기 위한 Band-gap 최적화의 아이디어(Sigmund and Jensen, 2003)를 축계 동적거동 최적화에 적용하였다. 임계속도와 구조물의 1차 고유 모드의 차이를 정규화 한 값을 목적함수로 하였으며, 중량 및 동적거동 최적화 설계 변수는 단면의 내반경 과 두께 로 설정하였다. 각 단계에서의 최적화를 위한 정식화는 다음과 같다.
(1단계) 중량최적화
(2단계) 동적거동 최적화
제한 조건은 제작성을 고려하여 두께 가 0.002m 이상 되어야 하는 것을 반영한 것이다. 2단계 동적거동 최적화의 제한조건은 Bellocchio(2005)가 제시한 기준에 의해 구조물의 주요 모드가 임계속도 하한 20%, 상한 10%를 벗어나야 한다는 조건을 따른 것이다(Headquarters, U.S. Army Material Command, 1974). 은 허용 비틀림 응력, 은 최대 비틀림 응력, 은 축계의 차 모드, 은 임계속도, 은 최대 허용 중량으로 1단계 중량 최적화를 참조하여 정한다. 축계 해석 시스템 과정은 Fig. 4와 같다.
2.5 수치예제 결과 및 고찰
고려하는 회전축은 로 고정된 상태이며, 양 끝단은 플랜지로 고정되었다고 가정한다. 초기 단면은 이고, AL2024 재료를 사용했을 경우 중량은 4.67Kg을 나타낸다. 재료의 정보는 Table 1과 같다.
Table 1.
Material information(AL2024)
|
Tensile strength () |
Elastic modulus () |
Shear modulus (𝜇) |
Shear strength () | |
| 469MPa | 73.1GPa | 28.0GPa | 283MPa | 45.1MPa |
축계의 회전수는 3,300rpm(55Hz)이며, 축에 연결된 로터의 날개 수는 , 그리고 동력전달장치로부터 오는 기어치의 가진은 935Hz이다. 축에 가해지는 토크 이다. 허용 전단력 은 로 계산되며, 동적 효과를 고려해 안전계수 은 3으로 하였다.
Table 2는 중량 최적설계 전과 후의 결과를 나타낸 것이며, 최적화된 중량은 0.71Kg으로 약 85%의 중량이 감소하였다. 사용한 최적화 기법은 SLSQP(Sequential Least Squares Programming)이며, 파이썬 프로그램으로 제공되는 라이브러리(SciPy 1.0, 2020)를 활용하였다. Fig. 5는 중량 최적화 전과 후의 설계점 변경을 나타낸 것이며, 중량 최적점은 식 (9)에서 고려한 제한조건을 만족시키는 것을 알 수 있다. 중량 최적화를 진행한 결과를 이용하여 동적 안정성을 검토하기 위해 고유치 해석을 진행하였고, 그 결과를 Table 3에 나타내었다. 여기서, 축의 양 끝단은 Fig. 3에서 모델을 활용하여 등방정 지지를 한다고 가정하고, 이때 지지부의 강성은 플랜지 부의 강성으로 유한요소 해석에 의해 구해지는 값으로 으로 구해진다(플랜지부의 강성).
Table 2.
Weight minimization in Step 1
| Weigth min. | Inner radius() | Thickness() | Weight |
| Before | 0.05m | 0.005m | 4.67Kg |
| After | 0.019m | 0.002m | 0.71Kg |
Table 3.
Critical speed check after weight optimization(Hz)
|
Shaft RPM |
Gear Freq. |
Under |
Upper |
1st mode |
2nd mode |
3rd mode |
| 55 | 935 | 748 | 1,028 | 1,008 | 4,032 | 9,072 |
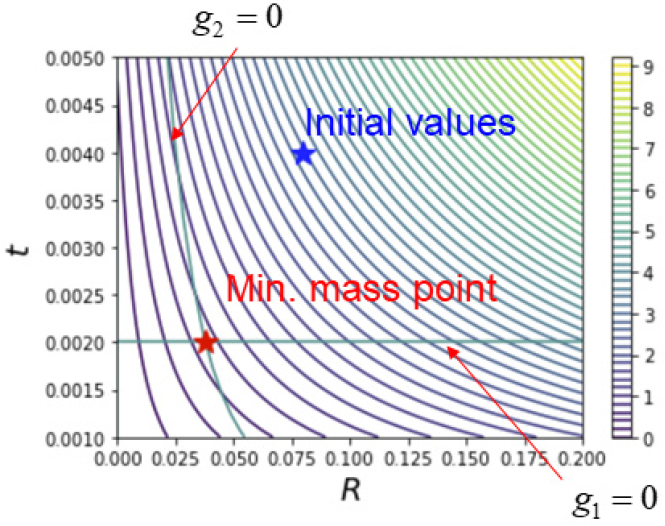
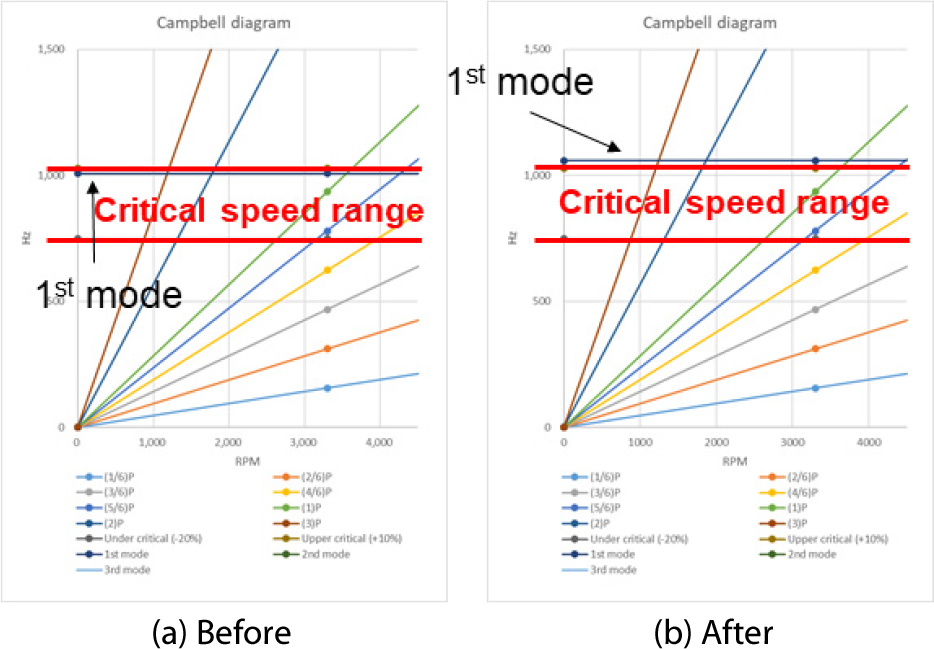
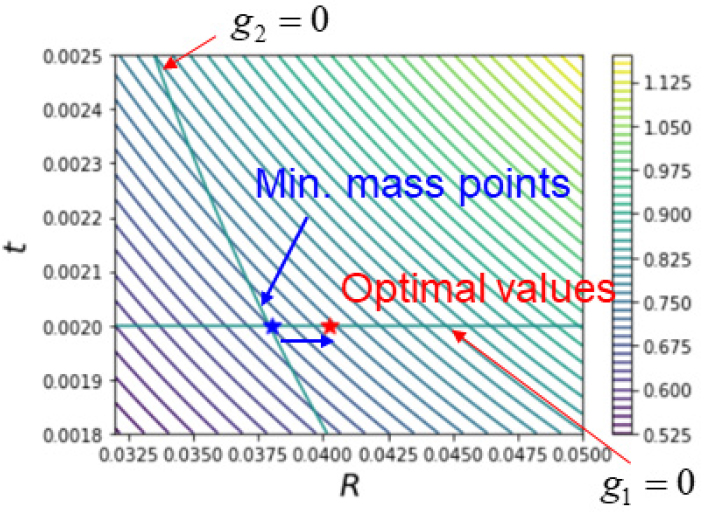
Table 3에서 알 수 있듯이, 1단계에서 중량 최적화된 축의 1차 모드가 임계속도 내에 있음을 알 수 있다. 이를 해결하기 위해서 2단계 동적거동 최적화를 진행하였다. 최적화를 위한 정식화는 식 (10)을 따르며, 여기서 최대 허용 중량 은 0.75Kg으로 정하였다. 최적화의 결과는 Table 4에 나타내었다. 여기서, 축 두께의 변화없이 축 내반경의 크기가 증가한 것을 알 수 있다. 축의 2차 모멘트 값을 높여 1차 모드를 높이는 효과를 주었고, 중량의 큰 증가를 막기 위해 축 두께 보다는 축 내반경을 증가시킨 것이다. Fig. 6은 동적거동 최적설계 전과 후의 Campbell 그래프를 나타낸 것이며, 최적설계 후 축의 1차 모드가 임계속도 영역을 벗어난 것을 알 수 있다. Fig. 7은 동적거동 최적화 전과 후의 최적점의 위치를 비교한 것이다. 마찬가지로 제한 조건을 만족시키며 최적화가 진행된 것을 알 수 있다.
Table 4.
Dynamic performance optimization results
| Opt. |
Inner radius () |
Thickness ()(a) |
Under |
Upper |
1stmode (Hz) |
Weight (Kg) |
| Before | 0.019m | 0.002m | 748 | 1,028 | 1,008 | 0.71 |
| After | 0.02m | 0.002m | 1,058 | 0.74 |
추가로 개발된 1D 보 요소가 실제 축의 거동을 얼마나 잘 모사할 수 있는지 검증하기 위해 3차원 유한요소 해석모델과 비틀림 응력 결과를 비교하였다. Fig. 8은 3D 유한요소의 해석 결과이며 Table 5는 1D 보 요소의 최대 비틀림 응력의 정확도가 3D 유한요소 결과와 비교하여 99%임을 보여준다.
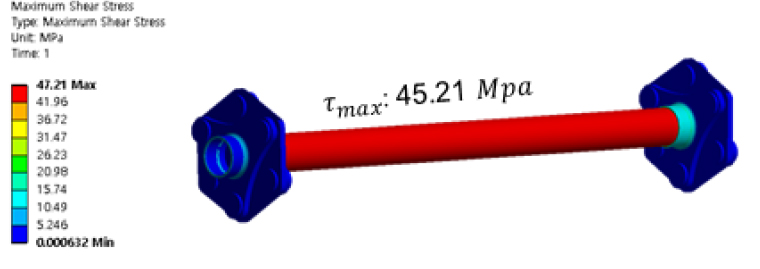
Table 5.
Dynamic performance optimization results
|
1D beam elements (a) |
3D FEM full model (b) |
Accuracy % ((a)/(b)) |
| 44.76Mpa | 45.21Mpa | 99% |
추가적으로, 주어진 1D 빔 요소가 동적거동을 시험과 비교 검증하였다. Fig. 9는 플랜지가 부착된 최적화된 축계의 모달 시험장치를 보여준다. 시험 시 양쪽끝단의 자유도를 풀어주었고, 1D 보 모델에서 플랜지의 질량은 점질량으로 모델링하여 시험 결과와 비교하였다. Fig. 10은 모드 시험결과를 보여주며, Table 6은 1~3차 모드에 대하여 1D 보 요소와 시험결과를 비교한 결과로 개발된 1D 요소는 96%의 정확도를 보임을 알 수 있다.
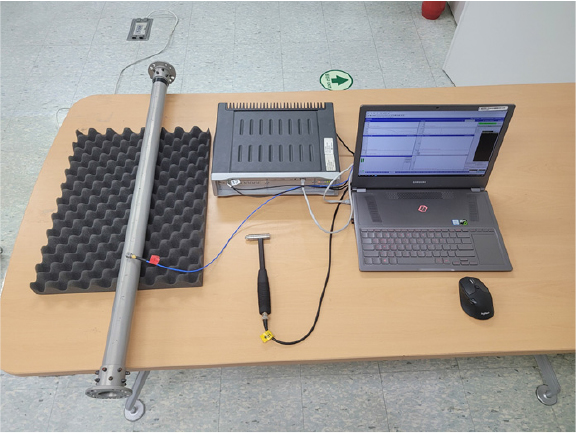
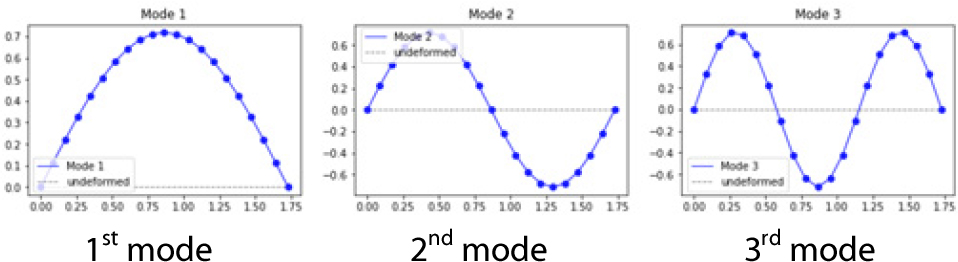
Table 6.
Dynamic performance optimization results
| Mode |
1D Beam model (a) |
Experiments (b) |
Accuracy % ((a)/(b)) |
| 1 | 205Hz | 213Hz | 96.2 |
| 2 | 588Hz | 607Hz | 96.9 |
| 3 | 1,162Hz | 1,210Hz | 96.0 |
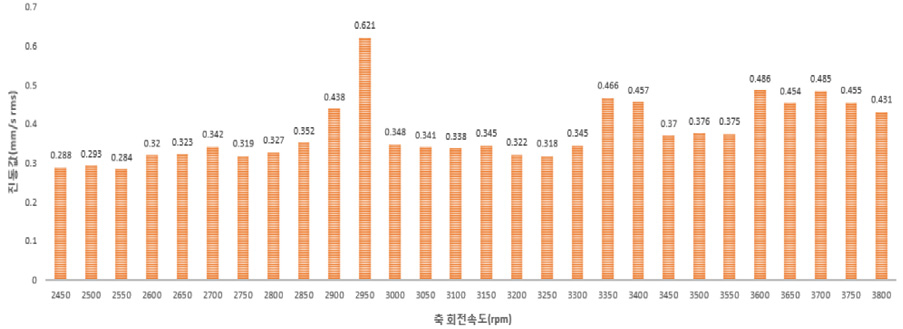
마지막으로 최적화를 반영하여 제작된 축이 주어진 회전 영역에서 공진이 일어나지 않는지를 회전 시험을 통해 알아보았다. 무부하 정격회전속도 3,300rpm의 80%~115% (2,650~3,800 rpm)영역에서 50rpm 단위로 회전 속도를 증대시키며 임계속도 범위를 충분히 포함하는 범위에서 진동 여부를 측정하였다(Fig. 11). 시험 결과 축의 중앙에서 최대 진동은 2,950rpm에서 0.651(mm/s rms) 발생하였고, 정격 회전속도 부근에서 공진현상은 발생하지 않았음을 알 수 있다(Fig. 12).