

1. 서 론
산업혁명 이후로 철도는 여객, 물류 수송을 위한 주요한 교통 수단으로 자리매김하여 왔고, 전세계적으로 다양한 고속/ 일반철도 및 도시철도 시스템이 개발되어 운행되고 있다. 철도 시스템은 궤도 방식에 따라 크게 바퀴식 철도와 자기부상식 철도로 구분할 수 있는데, 전자기력을 이용한 자기부상철도는 고유의 여러 가지 장점들로 인해 꾸준히 연구되고 있다(Lee et al., 2006). 우리나라에서는 2016년 2월 3일 '인천공항 자기부상철도'가 개통되어 운행 중이고, 중국과 일본에서도 상용화된 노선이 운행 중에 있다.
자기부상열차와 가이드웨이의 거동은 독립적이지 않고 서로 영향을 주고 받으므로, 이러한 상호작용을 엄밀히 고려하여야 이 시스템의 동적거동을 정확히 예측할 수 있고 이를 위하여 다양한 해석기법이 개발되었다(Zhou et al., 2010).
자기부상열차는 계측된 부상공극의 크기에 따라 제어되는 부상전자석의 전자기력에 의해 부상하게 되고 그 운동 상태가 결정되게 된다. 한편, 부상력은 가이드웨이에도 작용하여 가이드웨이의 변형을 발생시킨다. 즉, 자기부상열차 시스템의 상태는 부상력, 즉 부상공극의 제어에 의해 좌우되게 되는 것이다. 기존의 연구에서는 부상공극의 제어를 위해 관측 상태 변수 궤환제어기(Jung et al., 2011; Lee et al., 2014). Linear Quadratic Gaussian 능동 제어기(Lee et al., 2009), PI 제어기(Yau, 2009)를 사용하였다.
이 연구에서는 가속도 되먹임 기반 부상공극제어기법 (Sinha, 1987)을 사용하는 자기부상열차와 가이드웨이 상호 작용계의 동적거동 해석기법을 개발하고자 한다. 부상전자석 전자기력의 변동은 부상된 물체의 가속도와 밀접하게 연관 되어 있기 때문에, 차량의 가속도를 계측하여 부상력을 제어하는 것은 가장 기본적인 자기부상열차의 부상공극 제어기법이라고 할 수 있다. 그러므로, 이 연구에서는 가속도 되먹임 부상공극 제어기법을 이용한 자기부상열차와 가이드웨이 상호작용계의 운동방정식을 유도하고 동적 해석을 수행하고자 한다. 이를 위해, 2장에서는 이 시스템의 동적 해석기법에 대하여 간단히 설명하고, 3장에서는 실제 자기부상열차-가이드웨이 상호작용 계의 동적해석을 수행한다. 마지막으로 이 연구의 결론과 향후 연구방향에 대해 4장에서 제시한다.
2. 동적 해석기법
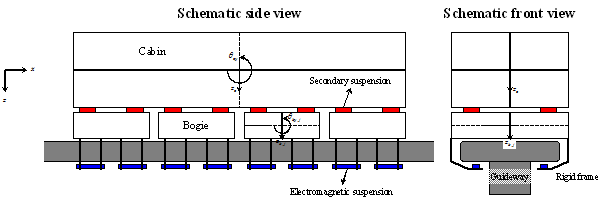
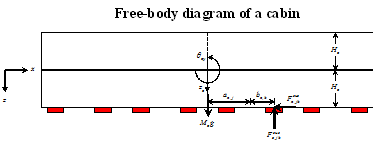
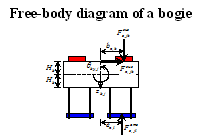
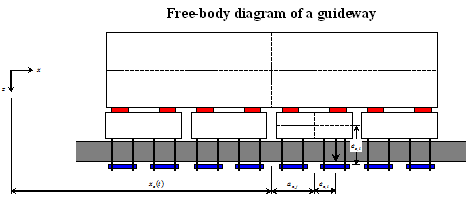
가속도 되먹임 부상공극제어기법을 이용한 자기부상열차와 가이드웨이 상호작용계의 동적 해석기법에 대하여 간략히 설명한다. Fig. 1은 단순화된 자기부상철도 시스템의 개념도 이다. 자기부상열차의 차체와 대차는 강체질량으로 근사하고, 2차원 병진 운동(heave)과 회전 운동(pitch)만 고려한다. 각 대차에는 부상 전자석을 위한 강체 프레임이 설치되어 있는데, 이 프레임의 질량과 회전관성은 무시한다. 각 대차와 차체는 2차 현가장치로 연결되어 있다. 이 연구에서는 부상공극 및 가속도 측정을 위한 센서를 별도로 고려하지 않고, 수치적으로 계산한 값으로 이를 대신한다. 단순화된 자기부상철도 시스템의 변수를 Table 1에 정리하였다. 이 변수들에 대하여 정지 부상상태에서의 값은 변수에 위첨자 0를 붙여서 나타내고, 정지 부상상태에 대한 변동량은 변수 앞에 ∆를 붙여 나타 내도록 한다.
가속도 되먹임 기반 부상공극제어기법은 다음과 같이 표현 된다(Sinha, 1987).
식 (1)의 부상공극제어기법을 적용하여 Fig. 1의 자기부상 철도 시스템의 지배방정식을 얻었다. Fig. 1에 보인 각 부분 구조계에 대한 운동방정식을 식 (1)의 부상공극제어기법과 결합하여 전체 시스템에 대한 동적 지배방정식을 Table 2와 같이 유도할 수 있다.
Table 1
Physical properties for a maglev train-guideway system
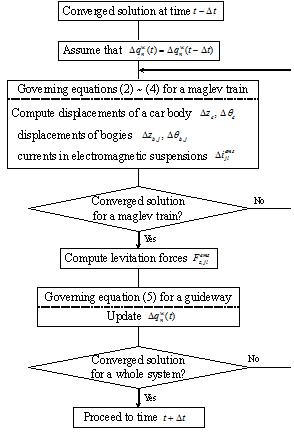
Table 2의 운동방정식을 연계하여 풀면 자기부상열차와 가이드웨이 상호작용계의 동적해석을 수행할 수 있다. 이 시스템은 강체 대차의 회전 운동에 의해 부상 전자기력이 작용하는 위치가 변하게 되는 비선형 특성을 보이므로, 해를 구하기 위해서는 반복 계산을 수행하여야 한다(Lee et al., 2014). 이 연구에서는 자기부상열차와 전자석의 지배방정식과 가이드웨이의 운동방정식을 교대로 만족시키도록 하여, 최종적 으로는 전체 시스템의 지배방정식을 만족시키도록 다음의 과정을 거쳐 계산을 수행한다.
(1)시간 t-∆t에서 얻은 자기부상열차-가이드웨이 상호 작용계의 수렴해를 다음 시간 에서의 초기 예측치로 사용한다.
(2)시간 t에서 식 (2)~(4)를 반복계산하여 차체의 변위 ∆zc, ∆θc, 대차의 변위 ∆zb,j, ∆θb,j,부상전자석 전류 ∆iemsjl를 얻는다. 단, 가이드웨이 모드좌표 ∆qwn는 시간 에서 구한 값으로 가정한다.
(3)단계 (2)에서 수렴해를 얻으면, 부상전자기력 Femsz,jl을 계산한다.
(4)단계 (3)에서 계산한 부상전자기력을 이용하여 식 (5)를 풀어서, 모드좌표 ∆qwn을 갱신한다.
(5)갱신된 모드좌표를 사용하여 단계 (2)~(4)의 계산을 다시 수행한다. 전체 자기부상열차-가이드웨이 상호 작용계가 평형을 만족할 때까지 이 과정을 반복한다.
(6)전체 시스템에 대하여 수렴해를 얻으면, 다음 시간 t+∆t로 진행한다.
Fig. 2는 이 연구에서 사용한 반복계산 과정의 흐름도이다. 이 반복계산을 통하여 자기부상열차-가이드웨이 상호작용계의 동적 해석을 수행할 수 있다.
3. 적용 예제
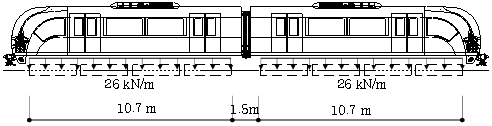
가속도 되먹임 기반 부상공극제어기법을 인천공항 자기부상 열차에 적용하여, 자기부상열차-가이드웨이 상호작용계의 동적 해석을 수행하였다. 인천공항 자기부상철도의 차량은 Fig. 3과 같이 2량 1편성으로 구성되어 있고, 1량 당 4개의 대차가 있다. 각 대차에는 4개의 부상전자석이 설치되어 있다. 차량의 만차 중량은 556.4kN이다. 차량의 운행속도 V는 100km/h 이다. 가이드웨이 구조물은 경간장 L은 25m의 단순교로 가정 하였다. 이 구조물의 단위길이당 질량 m은 5671.8kg/m (차량과 가이드웨이의 질량비 0.4), 휨강성 EI는 7.107GN․ m2인데, 이는 차량 자중에 의한 구조물의 처짐이 L/1,500= 16.667mm가 되도록 결정한 값이다. 구조물의 감쇠비는 동특성 계측과 모드 분석(modal analysis)을 통하여 산정 하여야 하지만, 이 연구에서는 철도설계기준(노반편)(Korea Rail Network Authority, 2013)에서 제안한 PSC 구조의 감쇠비 1%를 가정하였다.
Table 2
Governing equations for a maglev train-guideway system
| For the cabin | (2) |
| For the jth bogie | (3) where , |
| For the lth EMS of the jth bogie | (4) where |
| For the nth mode of guideway deflection | (5) where |
가속도 되먹임 기반 부상공극제어기법의 되먹임 이득 Kp, Kv, Ka를 결정하여야 하는데, 이 연구에서는 차량의 전체 질량과 같은 크기의 강체 질량이 가이드웨이를 운행할 때 발생하는 부상공극 변동량이 최소가 되도록 되먹임 이득을 결정하였다. 이 예제에서는 총 32개의 부상전자석이 설치되어 있으므로, 1772 kg의 강체 질량이 운행하는 경우를 고려하여 되먹임 이득을 결정하였다. 단, 가이드웨이의 m=177.2kg/m (차량과 가에드웨이의 질량비 0.4), EI=0.2221GN․m2 이다. 강체 질량이 가이드웨이를 운행할 때 발생하는 부상 공극의 변동량을 계산한 후, 이 변동량의 최대 절대값이 최소가 되도록 되먹임 이득을 결정하였다. 이와 같이 결정된 되먹임 이득은 다음과 같다.
식 (6)의 되먹임 이득을 각 대차에 설치된 각각의 부상 전자석에 적용하여 예제 자기부상열차의 부상공극제어를 수행 하였다. 이 열차가 시속 100km/h로 운행할 때 자기부상 열차-가이드웨이 상호작용해석을 수행하여 이 시스템의 동적 응답을 계산하였다. Fig. 4는 예제 자기부상열차의 첫 번째 대차 첫 번째 부상전자석이 설치된 곳에서의 부상공극의 크기, 첫 번째 차체의 가속도, 가이드웨이의 첫 번째 경간에서의 중앙부 처짐을 보여주고 있다. 또한, 가이드웨이의 단위 길이 당 질량을 변화시켜, 차량과 가이드웨이의 질량비가 0.2와 0.6인 경우의 동적응답도 Fig. 4에 포함하여 같이 보여주고 있다.
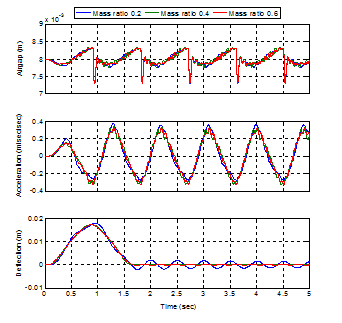
해석 결과에서 확인할 수 있듯이, 이 연구에서 적용한 가속도 되먹임 기반 부상공극제어기법을 적용하여도 부상공극의 크기는 인천공항 자기부상철도의 설계 기준인 8±3mm을 충분히 만족함을 알 수 있다. 또한, 인천공항 자기부상철도 가이드웨이 교량구조물의 설계 기준(Korea Rail Network Authority, 2010)은 단순교의 최대 처짐이 L/2,000이 되도록 규정하고 있는 것을 고려할 때, 이 연구에서 제안한 부상공극제어기법을 적용하면 안전하면서도 경제적인 가이드 웨이 구조물의 설계가 가능할 것임을 예상할 수 있다.
또한, 차량과 가이드웨이의 질량비는 가이드웨이의 동적 응답에 상당한 영향을 끼침을 확인할 수 있다. 가이드웨이의 질량이 증가하면 관성력 효과가 증가하는 것을 가이드웨이의 처짐 이력에서 관찰할 수 있다. 하지만, 부상공극이나 차체 가속도의 시간이력은 차량과 가이드웨이의 질량비가 차량의 동적 응답에 미치는 영향이 크지 않음을 보여주고 있다. 즉, 가속도 되먹임 기반 부상공극제어기법의 강건함(robustness) 을 확인할 수 있는 것이다.
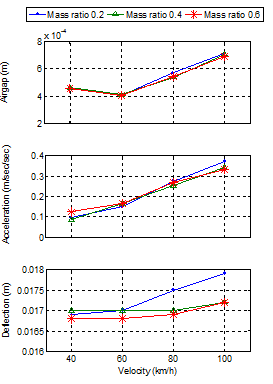
차량의 운행속도에 따른 자기부상열차-가이드웨이 상호 작용계의 거동 변화를 살펴보기 위해 운행속도를 40km/h, 60km/h, 80km/h, 100km/h로 변화시켜가며 동적 응답을 조사하였다. Fig. 5는 차량과 가이드웨이의 질량비와 차량의 운행속도에 따른 첫 번째 대차 첫 번째 부상전자석이 설치된 곳에서의 부상공극의 크기, 첫 번째 차체의 가속도, 가이드 웨이의 첫 번째 경간에서의 중앙부 처짐의 최대값을 보여주고 있다. 전반적으로 차량의 운행속도가 증가함에 따라 상호 작용계의 동적응답도 증가함을 관찰할 수 있다. 특히, 가이드 웨이의 처짐에 대한 차량과 가이드웨이 질량비의 영향은 두드러짐을 확인할 수 있다. 고정된 처짐비에서(이 예제에서는 L/1,500) 질량비가 작아질수록 구조물의 처짐이 증가할 수도 있음을 Fig. 5에서 관찰할 수 있는 것이다. 하지만, 인천공항 자기부상철도 가이드웨이 교량구조물의 설계 기준(Korea Rail Network Authority, 2010)은 질량비가 0.6이하가 되도록 규정하고 있으므로 설계 시 주의를 요하여야 할 것이다. 또한, 안전하고 경제적인 자기부상열차 가이드웨이 구조물의 설계를 위해서는 이러한 자기부상철도 시스템의 동적 거동 특성을 충분히 파악함이 우선되어야 할 것이다.
4. 결 론
이 연구에서는 가속도 되먹임에 기반한 부상공극제어기법을 자기부상열차에 적용하고, 이를 고려한 자기부상열차- 가이드 웨이 상호작용계의 동적해석을 수행하여 그 적용 가능성을 검토하였다. 이를 위해, 차량의 전체 질량과 같은 크기의 강체 질량이 가이드웨이를 운행할 때 발생하는 부상공극 변동량이 최소가 되도록 제어기법의 되먹임 이득을 결정한 후 이를 실제 해석에 적용하였다. 실제 동해석을 통해 제안한 부상공극제어 기법의 강건함과 안전하면서도 경제적인 가이드웨이 구조물의 설계 가능성을 확인하였다.
향후 연구에서는 실주행 자기부상열차와 가이드웨이 구조물의 동적 응답을 측정하여 이 연구의 해석 결과와 비교함이 필요할 것이다. 또한, 이 연구의 결과를 활용하면 현재 제안된 자기 부상열차 가이드웨이 구조물의 설계 기준을 보완하여 안전 하면서도 경제적인 구조물의 건설이 가능해질 것으로 판단 된다. 이에 대한 연구는 현재 진행 중으로, 향후 다양한 매개 변수 연구(parametric study)를 완료한 후 보완된 설계 기준을 제안할 것이다.
