

1. 서 론
2. 지능형 동시 인상 시스템
2.1 피어슨 상관관계 분석 알고리즘
2.2 지능형 동시 인상 시스템 소개
3. 지능형 동시 인상 시스템의 성능 평가
3.1 실험 조건 및 방법
3.2 실험 결과
3.3 시스템 성능에 대한 통계적 분석
4. 결 론
1. 서 론
국내 인프라의 상당 부분은 1980년대 전후에 기획 및 설계되어 양적 성장을 이루었으나, 현재 급속히 노후화되고 있다. 국토교통부의 인프라 총조사 사업에 따르면, 국내 교량 중 30년 이상 된 시설물이 약 9,344개소로 전체의 22.9%를 차지하며, 25년 이상 된 시설물은 15,695개소로 전체의 38.5%에 해당한다. 설계 당시의 품질 기준과 더불어 국내 지진 발생 빈도의 증가로 인해 노후화 문제가 심화되고 있으며, 이에 따른 적절한 후속 조치가 요구된다(Pinto et al., 2024).
건설 폐기물로 인한 탄소 배출을 저감하고 기존 시설물을 보수 및 보강하여 새로운 시설물 투자를 줄이려는 경향에 따라, 효율적인 유지 관리 기술이 요구되고 있다(Ju et al., 2024). 노후화된 교량을 포함한 다양한 시설물의 보수 및 보강 작업에서는 구조물을 인상하여 작업 공간을 확보하는 방식이 주로 사용된다(Gao et al., 2023; Pantelides et al., 2007). 그러나 작업자의 숙련도에 따라 시공 중 응력 집중으로 인한 구조물 손상이나 전도와 같은 안전사고가 발생할 수 있어, 모든 지점에서 균등한 인상을 수행하여 안전성을 확보하는 것이 중요하다(Soltani-Jigheh and Ehterami, 2024). 현재 상용화된 인상 시스템은 정밀한 인상 작업을 가능하게 하지만, 복잡한 통신 장비와 공법 도입에 따라 전문기술자가 요구되고, 특정 구조물에만 제한적으로 적용 가능한 한계가 있다(Dong and Zhu, 2018). 급증하는 노후 인프라의 수요와 다양한 산업 분야에 대응하기 위해서는 높은 확장성과 인력 효율성을 갖춘 구조물 인상 시스템의 개발이 필요하다(Mi et al., 2013; Zhong et al., 2024).
본 연구에서는 지능형 구조물 동시 인상 시스템을 개발하고, 통계분석 프로그램을 활용한 시스템 통합 제어를 구현하였다. 통계분석 프로그램은 피어슨 상관관계 분석 알고리즘을 기반으로 각 지점에서 실시간으로 계측된 인상량을 분석하여 다음 인상 지점을 결정하고, 정밀한 동시 인상을 수행할 수 있다. 통계분석 프로그램을 통해 구조물의 불균형한 하중 분포가 인상 작업에 미치는 영향을 반영하여 인상 과정 중 각 지점의 인상량 편차를 낮게 유지할 수 있으므로, 다양한 분야에 적용이 가능하다. 인상 지점 결정을 포함한 대부분의 시공 공정이 자동화되었고, 작업자의 숙련도와 관계없이 일관된 시공 품질을 보장할 수 있다. 개발된 인상 시스템은 실제 교량 현장에서 실험을 통해 인상 작업 성능을 검증하였으며, 노후 인프라의 유지 관리에 효과적이고 안전한 구조물 동시 인상 방법을 제시하였다.
2. 지능형 동시 인상 시스템
2.1 피어슨 상관관계 분석 알고리즘
본 연구에서는 구조물을 정밀하게 동시 인상하기 위해 피어슨 상관관계 분석을 활용한 알고리즘을 개발하였다. 피어슨 상관관계는 두 변수 간 선형 관계를 평가하는 통계 기법이다. 두 변수의 공분산을 각 변수의 표준편차로 나누어 피어슨 상관계수(Pearson correlation coefficient)를 계산하여 선형 관계를 정량적으로 나타낸다(Baak et al., 2020). 상관계수의 값은 +1에서 –1 사이로 나타나며, +1은 완벽한 양의 선형 관계를, -1은 완벽한 음의 선형 관계를 의미한다. 반면, 상관계수가 0에 가까울수록 두 변수 간의 선형 관계가 약함을 의미한다. 피어슨 상관계수 를 구하는 계산 과정은 식 (1)과 같다.
여기서, , 는 각 변수의 값, 와 는 각 변수의 평균값을 의미한다. 이 식은 정규화된 값을 통해 선형 관계의 강도를 나타낸다.
대형 구조물은 복잡한 형상과 하중 분포로 인해 지점 반력과 인상량이 일관되지 않을 수 있다(Guo et al., 2024). 본 연구에서는 각 인상 지점의 인상량을 변수로 설정하고 피어슨 상관계수를 계산하여 지점 간 선형 관계를 분석하였다. 구조물 인상이 모든 지점에서 동일한 방향으로 이루어지므로 피어슨 상관계수가 +1에 가까울수록 동시 인상이 정밀하게 수행되고 있음을 의미한다(Edelmann et al., 2021).
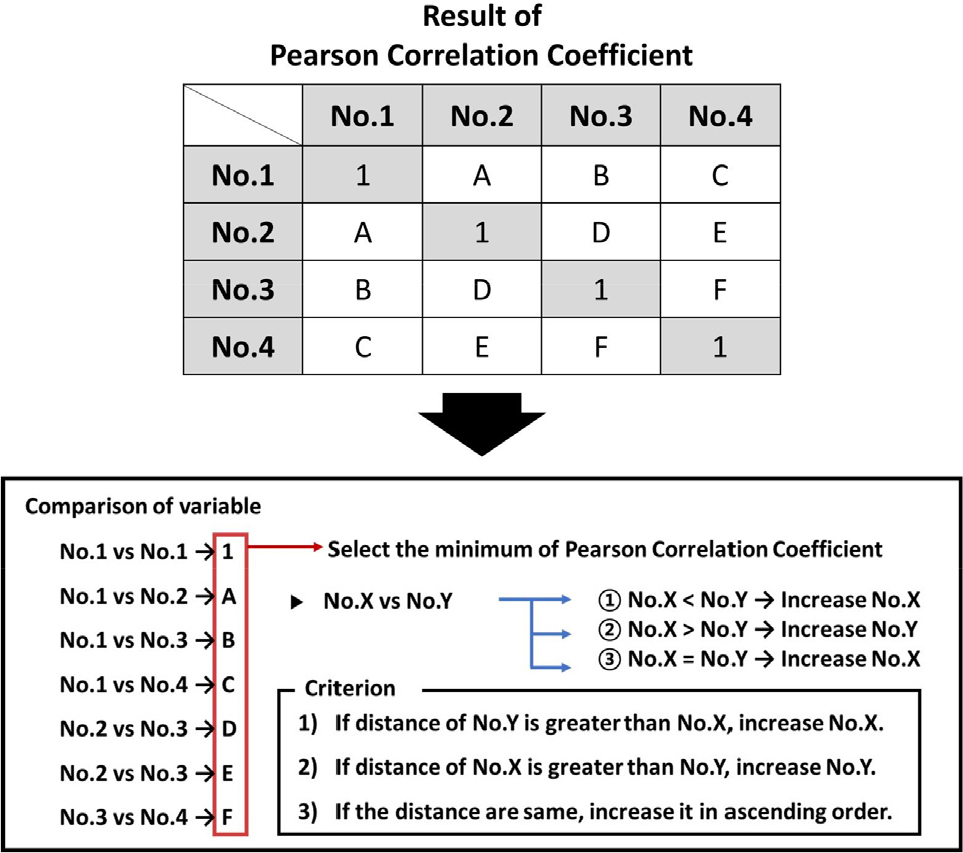
피어슨 상관관계 분석 알고리즘은 작업 중 가장 낮은 선형 관계를 보이는 두 지점을 식별하고, 이를 개선하는 반복 과정을 통해 전체 지점의 선형 관계를 개선할 수 있다(Zhang et al., 2023). 이를 위해, 전체 지점 n개 인상량 데이터 중 2개씩 조합하여, 개의 피어슨 상관계수를 계산한다(Fig. 1). 이 중 가장 낮은 상관계수를 가지는 두 지점 중 인상량이 작은 지점을 우선적으로 결정하고, 인상량이 동일한 경우 오름차순으로 인상을 수행하여 동시 인상을 진행한다.
2.2 지능형 동시 인상 시스템 소개
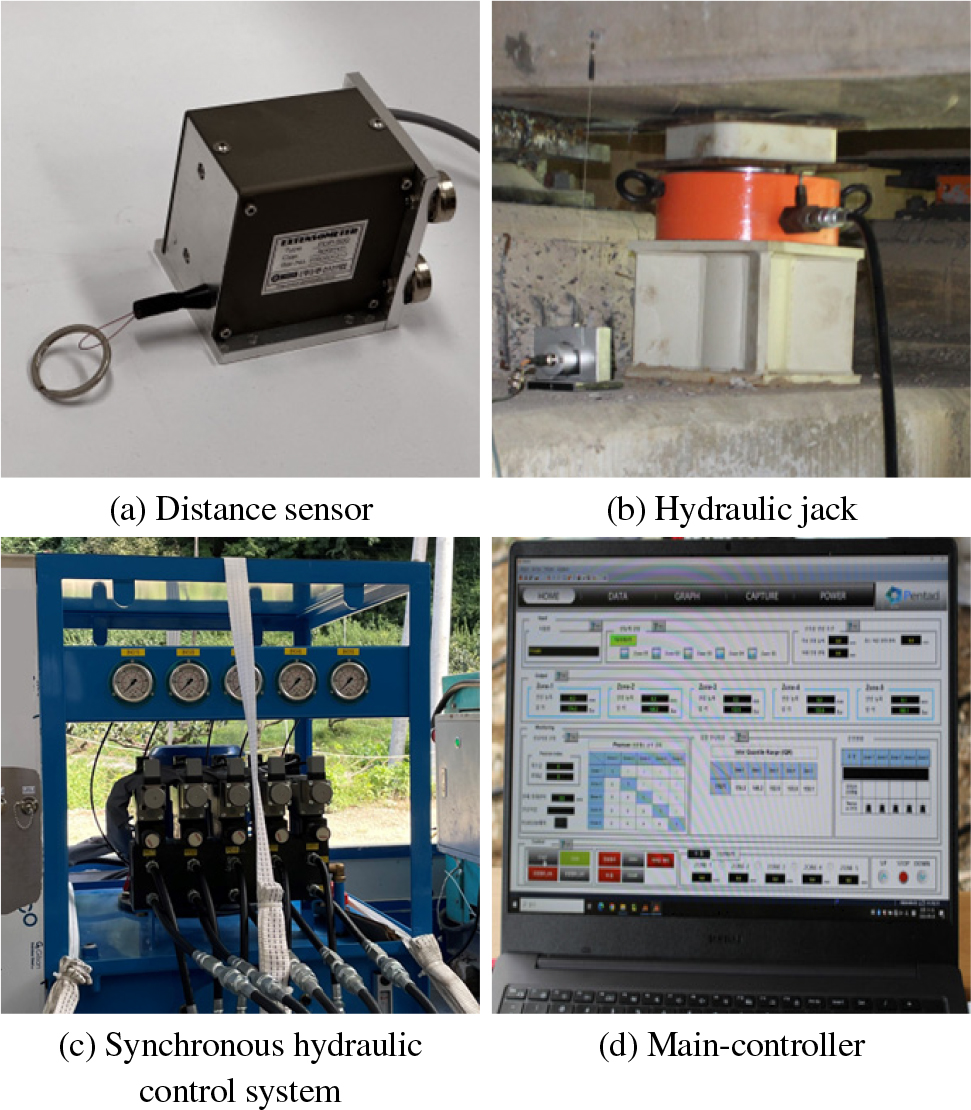
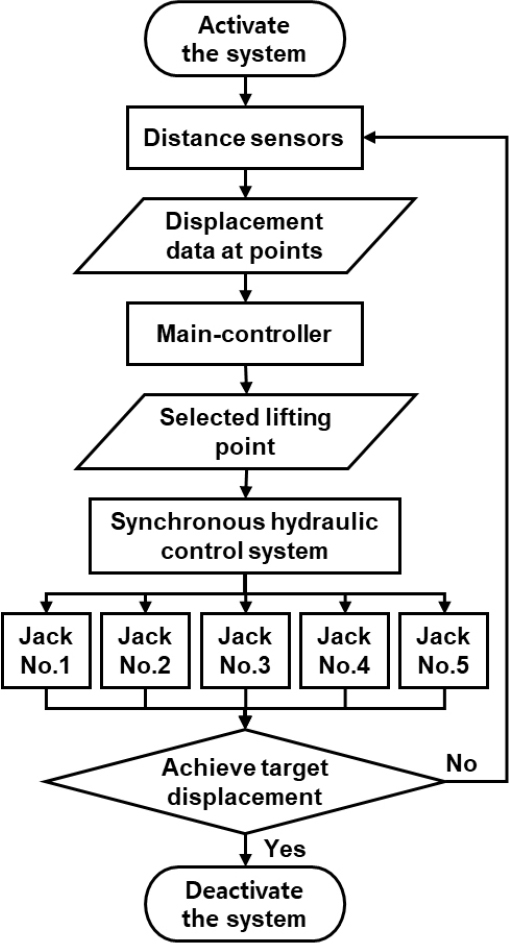
본 연구에서 개발한 지능형 동시 인상 시스템은 유압잭, 거리 측정 센서, 제어기, 유압 제어 시스템 등의 장치로 구성되며, 인상 지점 결정 및 자동 인상 기능을 갖춘 통계분석 프로그램을 통해 가동된다. 장치를 구성하는 유압잭(Fig. 2(a))과 인상량을 측정하는 거리 측정 센서(Fig. 2(b))는 쌍을 이루어 구조물 하부의 모든 인상 지점에 설치된다. 유압잭은 0.5mm/sec 이하의 속도와 ±0.32mm의 수직 정밀도로 구조물을 인상할 수 있으며, 유압 제어 시스템(Fig. 2(c))을 통해 개별적으로 구동된다. 거리 측정 센서는 실시간으로 인상량을 측정하며 제어기(Fig. 2(d))에 정보를 전달한다. 제어기는 각 지점의 인상량을 기록하고, 피어슨 상관관계 분석 알고리즘을 통해 선형 관계를 분석하여 다음 인상 지점을 결정한다. 유압 제어 시스템은 결정된 지점의 유압잭을 가동하여 지점을 인상하며, 모든 지점이 목표 인상량에 도달할 때까지 반복 과정을 수행한다(Fig. 3). 이 과정을 통해 인상 작업 중에도 각 지점이 최대한 균등한 높이를 유지하도록 하고 높은 정밀도를 보장한다. 본 시스템의 자동화로 구조물 인상의 전 과정을 통합적으로 운영할 수 있고, 효율적이고 높은 품질의 시공을 수행할 수 있다.
3. 지능형 동시 인상 시스템의 성능 평가
3.1 실험 조건 및 방법
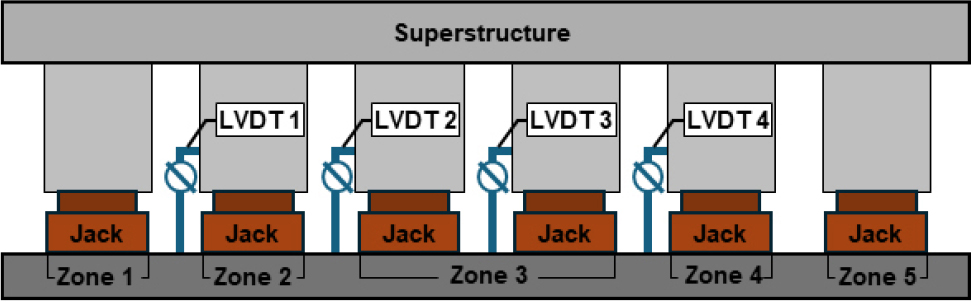
본 연구에서 개발한 지능형 동시 인상 시스템의 성능을 평가하기 위해 실제 교량에 설치하여 실험을 진행하였다. 실험은 경상북도 포항시 북구에 위치한 구지교를 대상으로 한국건설생활환경시험연구원(Korea conformity laboratories, KCL)과 공동으로 수행되었다(Fig. 4). 실험에 사용된 교량은 폭 12m의 PSC I형 거더교이며, 1000kN 용량의 교량 받침 6개로 지지되어 있다. 교량의 제원은 Table 1에 제시하였다. 각 거더의 교량 받침 앞에 한 쌍의 유압잭과 거리 측정 센서를 설치하고, 제어기 및 유압 제어시스템에 연결하였다. 제어기는 피어슨 상관관계 분석 알고리즘을 통해 각 지점의 인상량을 분석하여 결정된 인상 지점을 유압 펌프를 통해 인상하도록 구성하였다. 정밀한 시스템 성능 평가를 위해 중앙의 4개 거더에 LVDT(linear variable differential transducer)를 부착하고 0.1초 간격으로 변위를 기록하였다(Fig. 5).
Table 1
Specifications of the bridge used in experiment

유압 제어 시스템의 평균 인상 속도를 0.02mm/sec 이하로 설정하고, 교량의 상부구조를 5mm 인상하였다. 각 지점의 인상량 편차를 제한하기 위해 최소 허용 변위 편차를 0.3mm로 설정하였으며, 설정값 이상의 편차가 발생할 경우 낮은 높이의 지점을 우선하여 인상하도록 하였다. 최소 허용 변위 편차는 인접 거더 간 간격 2m를 고려해 설정되었으며, 최대 각도를 0.01° 이하로 제한해 전도 위험을 최소화하였다. 또한, 선행 연구(Guo et al., 2024)를 통해 0.3mm의 값이 구조적 안정성과 효율적인 인상 작업을 모두 만족할 수 있는 임계값임을 확인하였다. 따라서, 본 연구에서는 인상 작업 중 인상량의 편차를 0.3mm 이하로 유지함으로써 응력 집중으로 인한 손상을 방지하고 구조적 안정성을 확보하고자 하였다. 피어슨 상관관계 분석을 위한 충분한 데이터를 확보하기 위해 실험 시작 후 모든 지점의 유압잭을 동일한 압력으로 가동하여 인상하였다. 인상량 사이의 최대 편차가 최소 허용 변위 편차에 도달할 때 전체 인상을 중단하고 통계분석 프로그램을 통한 인상 지점 결정과 자동 인상을 수행하였다. 목표 인상량에 도달한 후 실험을 중단하고, 0.02mm/sec의 낮은 속도로 모든 지점을 인하하여 원래 위치로 복원하였다. 교량은 왕복 2차로이며, 차량이 통행하는 상태에서 실험을 수행하였다. 5회 반복 수행한 실험을 통해 얻어진 데이터를 분석하여 인상량, 지점 간 편차 발생, 선형성을 계산하고 그 결과를 확인하였다.
3.2 실험 결과
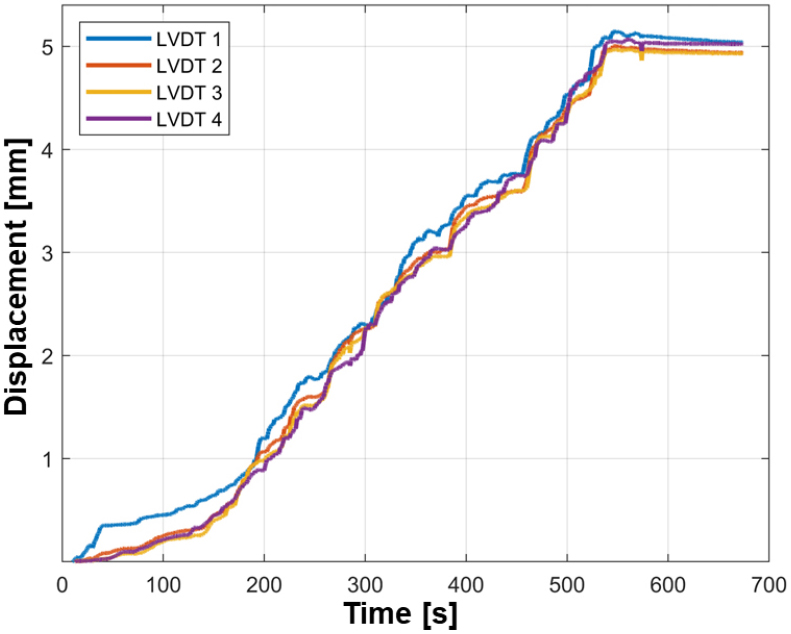
실제 교량 상부 구조를 5mm 인상하는 과정에서 LVDT를 통해 4개 지점의 변위를 측정하고, 지점 간 발생한 편차와 선형 관계를 계산하였다.
실험 초기에 각 지점의 유압잭은 동시 유압 제어 시스템을 통해 일정한 압력으로 가동되었다. 그러나 구조물의 불균형한 하중 분포로 인해 각 지점에서 서로 다른 인상 속도가 나타났으며, 특히 LVDT 1이 위치한 Zone 2의 변위가 다른 지점보다 빠르게 증가하는 것이 확인되었다(Fig. 6). 약 70초 후, 인상량의 최대 편차가 허용 임계값에 도달하자 전체 인상을 중단하고, 통계분석 프로그램을 통해 자동 인상을 수행하였다. 누적된 인상량 데이터를 사용하여 피어슨 상관계수를 계산한 결과, 선형 관계가 약한 지점 중 낮은 인상량를 보이는 지점을 우선적으로 인상하여 선형 관계를 개선하였다.
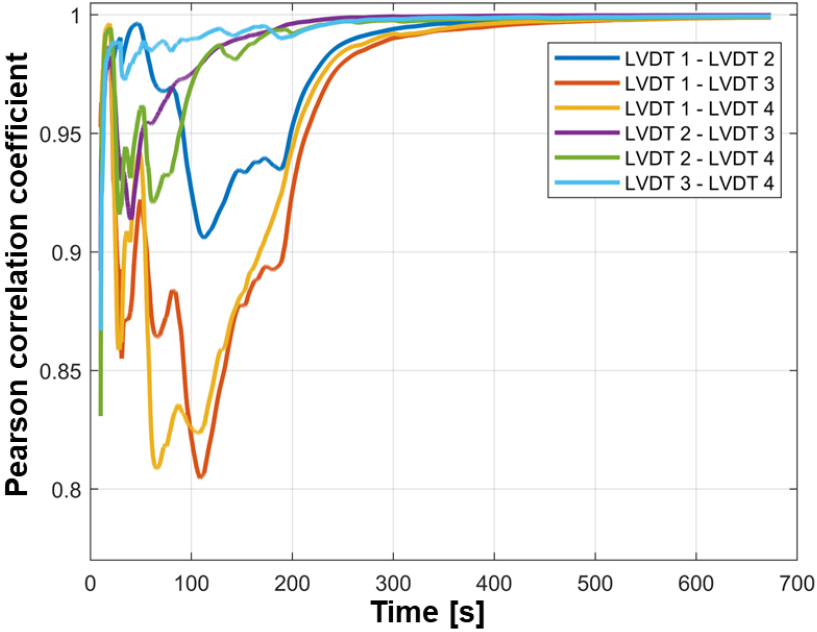
전체 인상이 종료된 후, LVDT 1 - LVDT 4, LVDT 1 - LVDT 3 간의 선형 관계가 가장 약한 것으로 나타났으며, 동시 인상을 통해 각 지점 간 선형 관계가 빠르게 개선되는 경향을 확인할 수 있었다(Fig. 7). 반복 과정을 통해 피어슨 상관계수가 증가하여 1에 수렴하고, 지점 간 편차가 감소하는 것을 확인하였다. 차량 통행으로 인한 하중 변화와 진동이 발생하였으나, 전체적으로 적은 편차로 인상이 수행된 것을 확인할 수 있었다. 인상 시스템의 성능을 분석하기 위해 각 지점 변위의 평균, 분산, 평균제곱오차(mean squared error)를 계산하였다. 분석 결과, 본 시스템은 하중 변화 및 진동 조건에서도 안정적인 인상 성능을 유지하였으며, 지점 간 변위 편차를 효과적으로 제어하는 것으로 나타났다.
3.3 시스템 성능에 대한 통계적 분석
LVDT를 통해 측정된 각 지점 변위의 평균, 인상 과정 중 발생한 최대 편차, 인상 완료 후 최종 편차는 Table 2에 제시하였다. 인상 후 평균 변위는 목표 인상량인 5mm에 대해 최대 0.04mm의 오차와 0.04mm의 표준편차를 보였다. 이를 통해 지능형 동시 인상 시스템이 정밀한 인상과 일관된 시공 품질을 달성할 수 있음을 확인하였다. 인상 과정 중 각 지점 간 최대 편차는 실험에서 설정한 최소 허용 변위 편차 0.3mm보다 약간 큰 것으로 확인되었으며, 특정 구간에서 변위가 불규칙적으로 감소한 것으로 보아, 이는 인상 작업 중 차량 통행에 따른 진동의 영향으로 판단된다. 인상 완료 후 최종 편차는 평균 0.12mm의 작은 값을 나타내었으며, 인접한 인상 지점 간 거리가 2m임을 고려할 때 허용 가능한 수준의 편차로 판단된다. 인상 과정에서 작은 편차를 보이며 정밀한 인상이 수행되었고, 더욱 정밀한 인상이 요구되는 작업에서는 최소 허용 변위 편차를 더 작게 설정하여 정밀도를 높일 수 있을 것으로 보인다.
Table 2
Final displacement and maximum deviation across points [mm]
인상 과정에서 측정된 변위의 최대 분산, 인상 완료 후의 분산, 그리고 변위 데이터에 대한 평균 제곱 오차를 계산하여 Table 3에 제시하였다. 인상 작업 도중보다 완료 후에 변위의 분산이 크게 감소한 것을 통해 모든 지점에서 동시 인상이 가능함을 확인하였다. 인상 완료 후의 분산은 선행연구(Kim et al., 2022)와 비교하여 작은 값을 나타내었으며, 통계분석 프로그램을 통해 각 지점 간 분산이 감소한 것을 알 수 있다. 평균 제곱 오차는 변위 데이터와 평균 간의 차이를 제곱한 후 전체 데이터 수로 나눈 값으로, 각 지점의 변위간 유사도를 설명할 수 있다. 선행 연구와 비교하여 약 40% 감소한 0.011mm 내외의 평균 제곱 오차 값을 통해 데이터가 강한 선형 관계를 나타냄을 확인하였다. 통계분석 프로그램을 통해 지능형 동시 인상 시스템을 제어한 결과, 정밀한 동시 인상이 가능하였으며 선행 연구와 비교하여 개선된 성능을 나타내었다. 본 시스템은 인상 과정 및 완료 후 각 지점 간 편차와 분산을 다소 감소시켰으며, 목표 거리만큼 정확하게 인상되었음을 확인할 수 있었다.
Table 3
Max variance and mean squared error comparison with prior research [10-2 mm]
| Max variance (increase) | Max variance (final) | Mean squared error | |
| Test 1 | 6.82 | 0.79 | 0.74 |
| Test 2 | 3.80 | 0.16 | 0.58 |
| Test 3 | 7.15 | 1.00 | 1.60 |
| Test 4 | 2.52 | 0.32 | 0.74 |
| Test 5 | 7.08 | 4.44 | 1.85 |
| Mean | 5.47 | 1.34 | 1.10 |
|
Previous study (Kim et al., 2022) | - | 1.83 | 1.82 |
4. 결 론
본 연구에서는 구조물 인상 작업에서 발생할 수 있는 응력 집중으로 인한 손상과 전도 등의 안전사고를 방지하기 위해 지능형 구조물 동시 인상 시스템을 개발하였다. 시스템은 인상 장치와 인상 지점 결정 및 자동 인상 기능을 갖춘 통계분석 프로그램으로 구성된다. 피어슨 상관관계 분석 알고리즘을 통해 인상 지점을 자동으로 결정하여 효율적이고 안전한 작업을 지원할 수 있다.
개발된 시스템의 성능을 평가하기 위해 경북 포항 북구 구지교의 교대에 시스템을 설치하고, LVDT를 통해 각 지점의 변위를 측정하여 성능을 분석하였다. 실험 결과, 구조물 인상 후 지점별 평균 변위는 목표 인상량인 5mm에 대해 최대 0.04mm의 오차를 나타내었고, 지점 간 최대 편차는 통계 분석 프로그램의 자동 인상을 통해 감소하여, 최소 허용 변위 편차 0.3mm 이하로 수렴하였다. 인상 완료 후 지점 간 최대 편차의 평균은 0.12mm로, 교량의 상부 구조 폭이 12m임을 고려할 때 허용 가능한 수준의 오차임을 확인하였다. 각 지점의 변위 간 유사도를 나타내는 평균 제곱 오차는 약 0.01mm 내외로, 지점 간 변위가 강한 선형 관계를 유지하여 정밀한 동시 인상이 가능함을 보여주었다. 또한, 변위 분산 값은 통계분석 프로그램의 인상 지점 결정과 자동 인상을 통해 감소하였고, 인상 완료 후 분산은 선행 연구와 비교해 감소한 결과를 나타냈다. 본 연구에서 개발한 지능형 구조물 동시 인상 시스템은 차량 통행에 의한 진동과 하중 변화가 있는 조건에서도 정밀한 인상과 일관된 시공 품질을 유지할 수 있었다. 실험 과정 중 인상량의 선형 관계를 실시간으로 개선함으로써 각 지점 간 편차를 최소화하며 안정적인 작업 수행이 가능하였다. 향후 본 시스템은 정밀한 인상을 요구하는 다양한 작업에 적용될 수 있으며, 통계분석 프로그램을 통한 자동화된 작업과 일관된 시공 품질을 기대할 수 있을 것이다.
