

1. 서 론
구조물의 동적 응답특성(고유진동수 및 모드형상)분석은 구조물의 관리 및 상태진단에 필요한 동적 매개변수를 제공하기 때문에 기계, 항공 및 건축물 등 다양한 분야에서 동특성분석이 활용된다(Farrar and Worden, 2007). 동적 응답을 계측하고 분석하는 다양한 방법 중 이동 차량을 활용한 교량의 동특성 분석은 1)차량의 질량을 활용함으로써 구조물에 적절한 크기의 진동을 유발할 수 있고, 2) 차량센서를 활용하여 비접촉적으로 교량의 동적데이터 확보가 가능하기 때문에 최근 관련한 연구가 진행된 바 있다(Farrar et al., 1996; Kim et al., 2003; OBrien et al., 2017; Sun et al., 2016; Zhang et al., 2002).
이동차량을 활용한 교량동특성 거동 분석은 차량의 질량 및 진동을 무시하지 않는 경우 교량과 차량의 동적상호작용을 반영해야 한다(Kim et al., 2016). 이때, 교량-차량 상호작용시스템은 시간가변적이므로 고유진동수 또한 시간가변적이며 비선형적 특성을 보인다. 따라서 정확한 예측이 어렵기 때문에 대부분의 연구에서는 실험적으로 규명하였다. 예를 들어 Kim 등(2003)과 Li 등(2003)은 차량의 이동시 교량의 고유진동수가 최대 5.4% 변화하며 주기적인 변동특성을 갖는 것을 확인하였다.
일부 연구에서는 이론식을 바탕으로 상호작용시스템의 변수와 시간가변적 고유진동수의 상관관계를 분석하였다. Yang 등(2013)은 교량과 차량을 각각 단자유도를 갖는 시스템으로 구성하여 교량과 차량에 대한 고유값(eigenvalue)에 대해 수학적 정해를 유도하였으며, 이론해를 기반으로 다양한 차량변수(질량 및 교량-차량 고유진동수비)에 대해 상관관계를 도식화하여 나타내었다. 위 연구는 이후 다양한 연구자들에 의해 실험실 단위 교량 및 차량 모델을 통해 이론식이 검증되었다(McGetrick et al., 2015). 뿐만 아니라 Nagayama 등(2017)의 연구결과로부터 주행차량의 동적 응답은 교량의 동적특성을 포함하고 있으며, 이를 통해 비접촉적 방식으로 교량을 진단하기 위해서는 차량으로 인해 변화하는 교량의 동적특성에 대한 이해가 필요함을 알 수 있다.
하지만, 실제 교량의 경우 다양한 재료적 특성으로 인해 1차 이상의 고유값에서 상호작용이 발생할 수 있으므로(즉, 교량 2차 – 차량 1차 고유값 등) 교량 및 차량의 다양한 고유값 차수에 대한 상호작용 분석이 필요하다. 따라서 본 연구에서는 교량과 차량이 각각 2자유도를 갖는, 총 4자유도의 시스템을 형성하여 수치해석적으로 시간가변적인 교량 및 차량의 고유값 상관관계를 분석하였다.
2. 본 론
이 장에서는 교량-차량 상호작용 모델을 소개한 후, 다양한 차량 변수에 대한 시간가변적 시스템 동특성을 교량 및 차량의 고유값 상관관계를 통해 분석한다.
2.1 교량-차량 상호작용모델
본 연구에서 사용된 교량-차량 상호작용모델은 Fig. 1과 같다. 교량의 길이는 이며 전체 길이에 대해 동일한 단면상수를 갖는 Euler-Bernoulli 단순지지보로 모델링하였다. 교량의 표면은 매끄러운 것으로 가정하여 가상일의 원리를 활용한 assumed modes method 모델을 개발하였으며, 교량의 임의 위치 에서의 수직 변위 를 기준으로 한 절대 변위를 사용하여 나타내었다. 또한 차량은 1/4차량(Quarter-car)이며 상질량()과 하질량() 사이를 서스펜션()으로 연결하여 모델링하였다. 하질량과 교량은 타이어의 재료적 성질()을 반영하여 단일 접점에서 교량과의 분리없이 일정한 속도()로 주행하는 것으로 가정하였다. 따라서 차량이 에 위치하였을 때 교량의 운동방정식은 다음과 같이 표현된다.
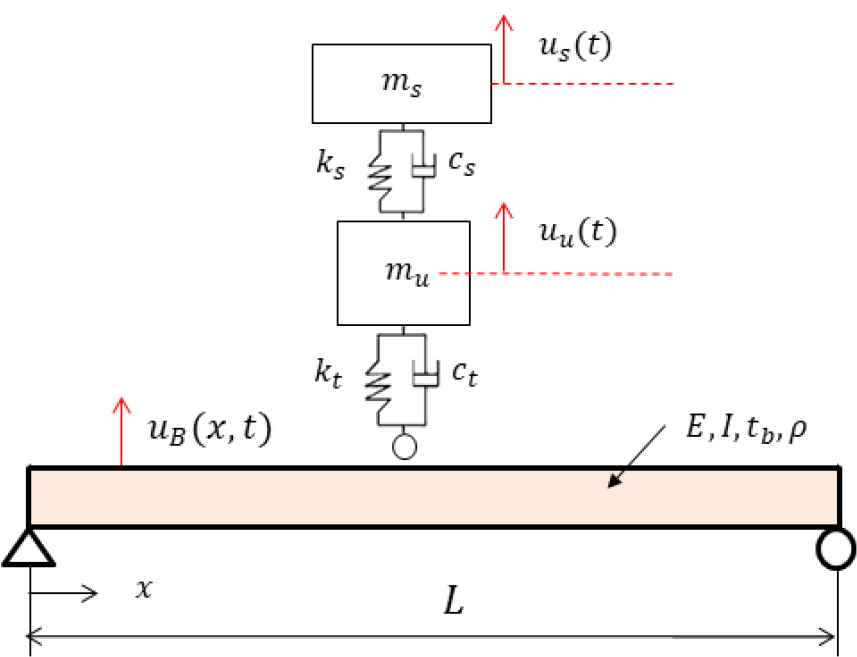
시스템의 변위벡터 이며, 교량의 수직 변위 로 정의하였다. 여기서, 는 형상함수이며, 는 각각 교량의 질량행렬, 강성행렬, 감쇠행렬을 나타낸다. 또한 는 차량과의 상호작용에 의해 교량에 가해지는 하중 벡터를 나타낸다. 는 휨강성, 는 중력가속도이다.
식 (1)에서 나타난 바와 같이 교량-차량 상호작용으로 인한 운동방정식의 감쇠행렬과 강성행렬은 모두 비대칭 행렬이며, 시간종속항을 갖는다. 즉, 식 (1)의 질량행렬과 강성행렬을 일정시간에 대해 정의한 후 고유값 해석을 통해 임의 시간 t에 대한 상호작용 시스템의 고유진동수를 수치적으로 계산할 수 있다. 다음 절에서는 여기서 정의된 운동방정식을 활용하여 시간가변적 시스템 해석을 위한 매개변수를 정의한다.
2.2 상호작용 해석을 위한 매개변수 선정
Yang 등(2013)은 차량과 교량을 각각 1자유도로 가정하여 상호작용 시스템에 대한 시간에 따른 고유값의 정해를 다음식과 같이 유도하였다.
여기서, 와 는 각각 상호작용이 발생하지 않은 차량과 교량 자체의 고유진동수를 의미한다. 또한, 식 (5)를 활용하여 다양한 교량과 차량의 질량에 대해 와 초기고유진동수의 비율을 고유값 증폭비(Frequency Amplification Ratio, FAR)로 정의하였다.
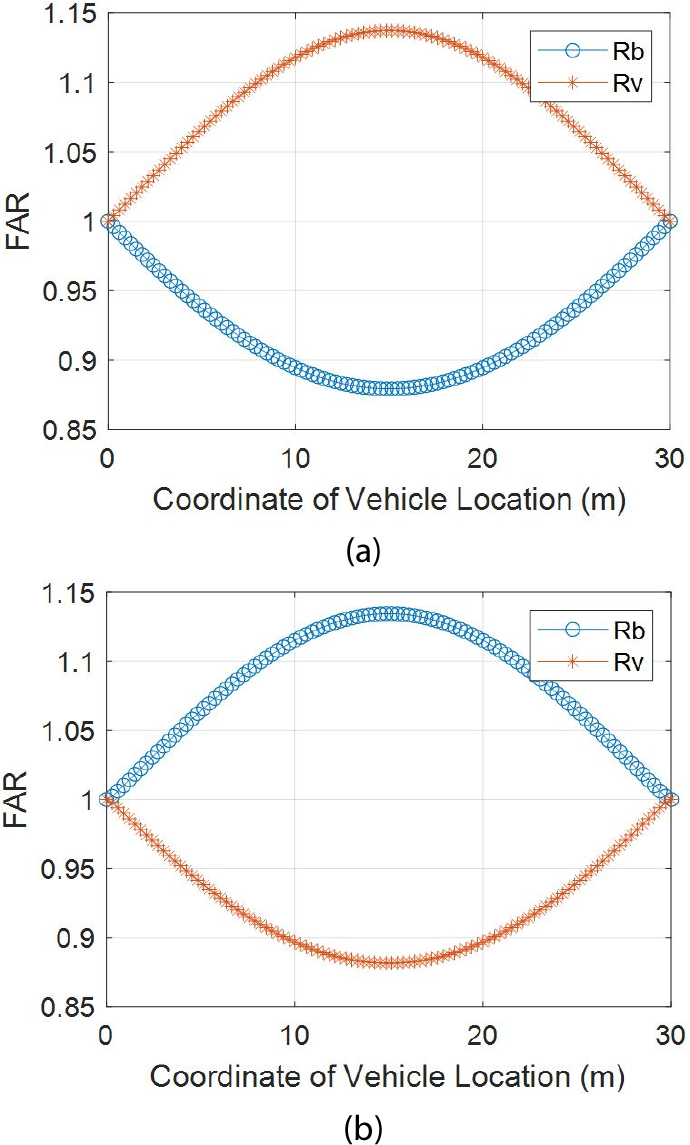
식 (5)와 식 (6)을 활용하여 두 가지 초기 고유진동수비에 대해 산출된 FAR을 Fig. 2에 나타내었다. Fig. 2(a)는 , 즉 인 경우로 교량과 차량의 고유값은 모두 half-sine wave의 형태로 변화하였으며, 차량이 교량의 중앙경간에 가까워질수록 차량의 FAR은 1보다 큰 값으로 증가하고 교량의 FAR은 1보다 작은 값으로 감소하는 추세를 보였다. 반대로, 인 경우에도 Fig. 2(b)와 같이 half-sine wave의 형태로 변화하였으나 차량의 FAR은 감소하는 경향을, 교량의 FAR은 증가하는 경향을 보였다. 특히 구간에서 연속적으로 초기고유진동수비를 변화한 경우 Fig. 2와 같이 FAR그래프에서 분기점이 발생하는 것을 확인하였다. 기존 연구를 통해 상호작용으로 인한 시스템의 고유값은 𝛽의 값에 따라 FAR이 증가하거나 감소하는 것을 알 수 있으며, 공진주파수 영역에서는 FAR값의 분기점을 갖는 것을 알 수 있다.
본 연구에서는 차량과 교량의 초기 고유값이 각각 2개씩 존재하기 때문에 기존의 연구와 같이 하나의 𝛽로 정의하기 어렵다. 따라서 진동수의 초기비율을 조절하는 매개변수를 시스템 질량비와 강성비로 각각 다음식과 같이 정의하여 상호작용에 따른 FAR을 분석하였다. 여기서, 𝜆은 무차원이나 𝛾는 의 단위를 갖는다.
2.3 수치예제 결과 및 고찰
본 절에서는 Table 1에 나타낸 교량과 차량의 제원을 앞서 정의한 운동방정식에 적용하였다. 다각적인 매개변수에 대한 다양한 차량과 교량의 고유진동수비를 분석하기 위하여 상질량과 타이어 강성을 각각 변화시키며 진동수 변화 추이를 분석하였다.
Table 1.
Vehicle and bridge properties
교량 수치모델 개발에 활용한 형상함수는 다음식과 같이 수직방향으로 2자유도를 갖는다.
이 때 교량수치모델의 초기 고유진동수는 4.78Hz와 19.12Hz 이다. 먼저 타이어 강성을 로 고정시킨 뒤 분석을 진행한 결과 차량의 상질량이 가장 작은 인 경우 𝜆=0.0366이며, 차량의 초기 진동수는 56.09Hz와 412.24Hz로 나타났다. 가장 큰 상질량 인 경우 𝜆=0.67이며, 차량의 초기 진동수는 12.60Hz와 219Hz로 나타났다. 따라서 차량의 상질량을 점차 증가시킬 때 교량의 2차 고유진동수와 차량의 1차 고유진동수가 서로 교차하는 것을 알 수 있으며, 교차는 Fig. 3에 나타난 바와 같이 𝜆=0.3에서 발생한다.
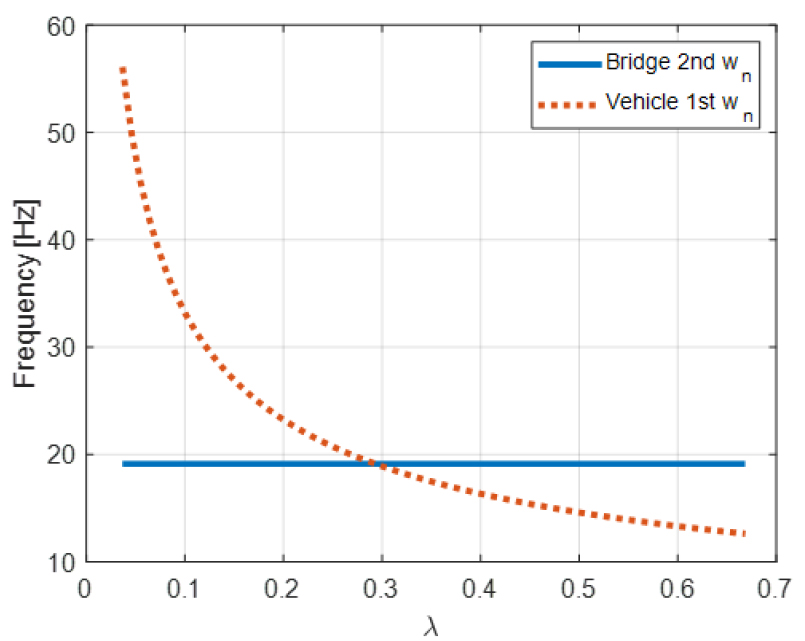
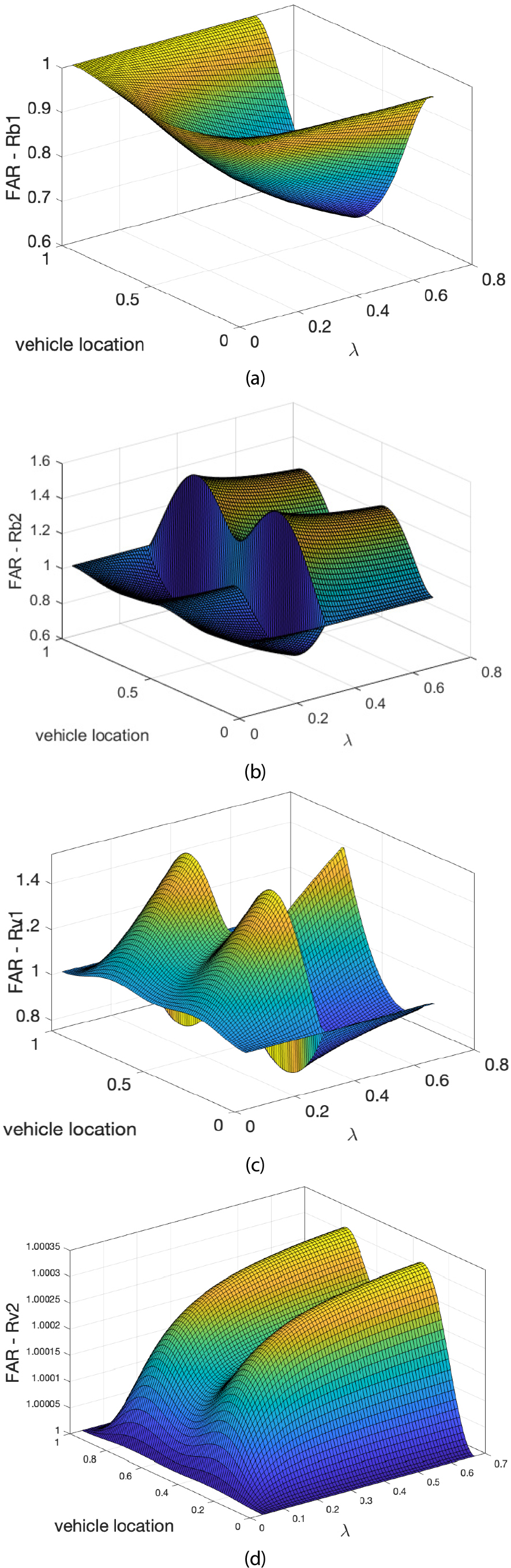
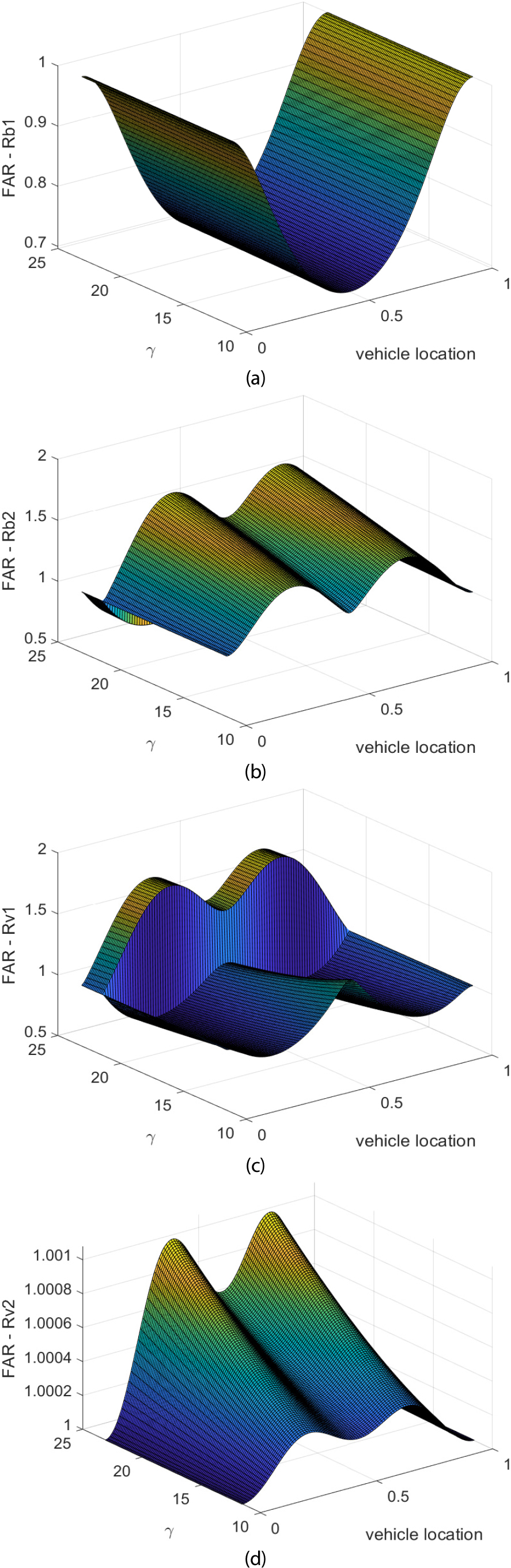
Fig. 4는 각 𝜆에 대해 차량이 교량 위를 주행할 때 차량의 상대 위치에 따른 시스템의 고유진동수를 나타낸다. Fig. 4(a)는 교량의 1차 고유진동수에 대한 그래프이며, 모든 𝜆에 대해 FAR이 1보다 작게 나타난다. 이는 교량의 1차 고유진동수가 차량의 모든 고유진동수보다 항상 작기 때문이며, 나타난 포물선 형태의 변화형상은 Yang 등(2013)의 연구와 일치한다.
Fig. 4(b)는 교량의 2차 고유진동수로, 𝜆<0.3일 때는 FAR이 1보다 작으나 𝜆=0.3에서 분기점을 갖고, 이후구간에서는 FAR이 1보다 크게 나타난다. 특히 교량의 2차 고유진동수에 대한 FAR은 분기점에서 가장 크게 나타나며, 이후 𝜆가 증가할수록 점차 감소하는 것을 알 수 있다.
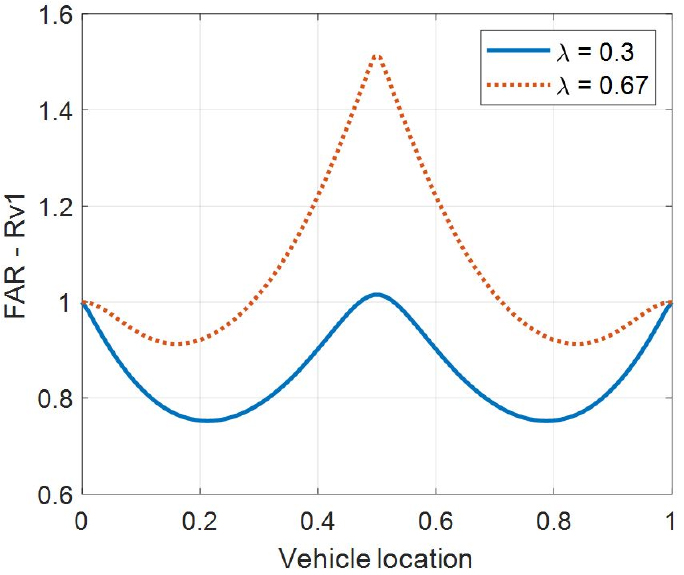
Fig. 4(c)는 차량의 1차 고유진동수에 대한 그래프이며 𝜆<0.3구간에서 FAR이 1보다 크게 나타나나 분기점 이후(𝜆>0.3) 구간에서는 차량의 위치에 따라 FAR이 1보다 작은 구간과 1보다 큰 구간이 모두 발생하는 것을 알 수 있다. FAR추이를 자세히 살펴보기 위하여 𝜆=0.3위치와 𝜆=0.67위치에서의 변화값을 Fig. 5에 나타냈다. 𝜆=0.67일 때 중앙경간에서 FAR 값이 1.5이상으로 높은 값을 보이는 것을 알 수 있으며, 𝜆=0.3일 때에도 중앙경간에서는 FAR값이 1.015로 1을 넘어가는 것을 확인할 수 있다. 이러한 현상은 교량의 2차 고유진동수와 차량의 1차 고유진동수 간의 상호작용이 발생하였기 때문인 것으로 판단된다. 따라서 차량과 교량의 고유진동수 교차가 발생 할 때 상호작용하는 교량의 고유진동수 차수에 따라 FAR 변화 추이가 다름을 알 수 있다.
마지막으로 Fig. 4(d)는 차량 2차 고유진동수에 대한 그래프로 모든 𝜆에 대해 FAR이 1보다 크게 나타나며, 교량 중앙 경간에서 상대적으로 낮은 FAR값을 보이고 전체적으로 M자 형으로 변화하는 형태이다. 또한 다른 그래프와 비교하였을 때 변화의 추이가 매우 작음을 알 수 있는데, 이러한 현상은 차량의 2차 고유진동수가 교량 전체 및 차량 1차 고유진동수에 비해 매우 커 상호작용의 영향이 적게 나타났기 때문으로 판단된다.
다음으로 𝛾를 변화시키면서 FAR변화 추이를 Fig. 6에 나타냈다. Fig. 6(a)에 교량의 1차 고유진동수에서는 타이어 강성에 따른 FAR의 변화가 나타나지 않으며, 오로지 위치의 변화로 인해 FAR이 감소한다. Fig. 6(b)와 Fig. 6(c)는 각각 교량의 2차 고유진동수와 차량의 1차 고유진동수를 나타낸다. 𝛾=21.45에서 Fig. 4의 결과와 유사하게 FAR의 분기점이 발생하며, 분기점 이전에 교량의 FAR은 1보다 큰 값을 보이며 분기점 이후 1보다 작은 값을 보인다. 마찬가지로 차량은 분기점 이전 감소 추세를 보이며 중앙경간에서 1보다 큰 FAR을, 지점부근에서 1보다 작은 FAR을 보인다. 차량의 2차 고유주기인 Fig. 6(d)는 𝛾가 증가함에 따라 M자 형태를 유지하며 증가하는 추세를 보이나 그 변화의 추이가 매우 작음을 알 수 있다.
3. 결 론
본 연구에서는 교량을 주행하는 차량으로 인해 발생하는 동특성이 상호작용시스템에 미치는 영향을 분석하였다. 상호작용 모델 개발에서 교량은 assumed modes method를 활용하여 모델링하였으며, 차량은 상질량과 하질량으로 구성된 1/4차량(Quarter-car)이다. 여기서, 교량과 차량을 각각 2자유도를 갖도록 모델을 개발함으로써 단자유도 이상의 고차 교량진동수가 시스템 공진현상에 미치는 영향을 고유값 증폭비(Frequency Amplification Ratio, FAR)를 이용하여 산출하였다.
수치예제를 통하여 차량질량비(𝜆)와 시스템강성비(𝛾)에 대해 주행 중 변화하는 FAR를 분석하여 다음과 같은 결론을 내릴 수 있다.
1)교량 및 차량의 고유진동수는 이동질량과 교량의 초기고유진동수 상관관계에 의해 결정이 되는 경향을 보인다. 즉, 초기 교량 고유진동수가 차량의 고유진동수보다 큰 경우 교량의 FAR은 1보다 커지고 차량의 FAR은 1보다 작아지며, 반대의 경우 교량과 차량의 FAR은 뒤바뀐 결과를 보인다.
2)초기 고유진동수의 비가 커서 𝜆변화 구간 내에서 교차되지 않는 경우 FAR은 𝜆값의 증가에 따라 변화가 커진다. 반대로 초기 고유진동수가 근접하여 𝜆변화 구간 내에서 교차하는 경우, FAR의 값은 분기점을 갖는다.
3)차량의 타이어 강성을 변화시키며 상호작용 시스템의 고유진동수 변화추이를 살펴보았을 때, 질량비에 따라 변화하는 FAR과 유사한 추세를 보이는 것을 알 수 있으나 교량의 저차모드는 차량강성에 영향을 전혀 받지 않음을 알 수 있다.
4)일반적으로 초기 고유진동수가 작은 시스템이 1보다 작은 FAR을 갖으나 교량의 2차 고유진동수와 차량의 1차 고유진동수 사이에서 상호작용이 발생해 차량의 고유진동수가 교량보다 작은 고유진동수를 갖는 경우 중앙경간에서 FAR이 1보다 큰 값을 보이는 것을 알 수 있다. 이러한 특징은 교량 차량 상호작용이 발생하는 고유진동수 형상에 따라 FAR의 추이가 다름을 나타낸다.
본 논문에서는 수치해석적으로 분석한 주행차량으로 인해 변화하는 교량의 동적특성을 분석하였다. 교량을 주행하는 차량의 동적응답은 교량의 동특성을 보유하기 때문에 본 연구결과를 기반으로 보다 다양한 자유도의 차량시스템에 대한 분석이 이루어진다면, 추후 비접촉적 방식으로(주행차량 센서기반) 계측된 데이터를 통해 교량에 대한 안전진단이 가능할 것으로 기대된다.
