

1. 서 론
자연에서 실제로 발생하는 구조물의 변형은 비선형적 특징을 가진다. 하지만 비교적 작은 변형에서는 이러한 비선형성이 뚜렷하지 않기 때문에 간편한 선형적 해석으로도 발생하는 물리적인 현상을 분석할 수 있고 그 결과도 상당히 정확하다. 하지만 구조물에 큰 변형이 발생할 경우, 선형적 해석은 실제와 매우 다른 결과를 제공하게 된다(Fertis, 2006). 특히 비선형적 거동을 분석한 선형적 해석의 결과가 구조물의 안전성을 결정하는 요인으로 사용된다면 과잉설계(over-design)를 야기할 수도 있다. 그리고 이것은 필요한 재료의 양을 결정하는데 직접적으로 작용하여 구조물의 경량화와 생산단가에 부정적 영향을 미치게 된다. 따라서 구조물의 큰 변형을 정확하게 예측하기 위해서는 비선형성을 고려한 해석적 접근이 필요하다.
또한 현실에서 수시로 변하는 공력을 받는 항공기의 주 날개나 헬리콥터의 로터 블레이드와 같은 구조물의 경우 정적해석과 동적해석의 결과는 큰 차이를 보인다. 만약 구조물에 작용하는 하중이 충분히 작더라도 구조물의 고유 진동수와 비슷한 크기로 가진된다면 구조물은 매우 큰 변형을 일으키며 파손될 수도 있다. 따라서 이러한 구조물의 동역학적 거동을 선형적 가정만 적용하여 예측한다면 일부 진동수 구간에서는 실제와 매우 다른 결과를 얻을 수도 있을 것이다. 따라서 본 논문에서는 이러한 현상을 직접 확인하고 정확한 예측을 위한 방법을 모색하기 위하여 다음과 같은 과정을 수행하였다.
본 논문은 위에서 언급한 항공기의 주 날개나 헬리콥터의 로터 블레이드와 같은 구조물을 한 쪽 끝단은 완전 고정되고 반대쪽 끝단은 자유로운 외팔보(cantilevered beam)로 가정(Megson, 2007)하고 자유 끝단에 수직으로 가진된 외력을 가하였을 때 구조물의 2차원 거동을 선형적 해석과 비선형적 해석으로 분석하였다. 외팔보의 가진 상황에서 비선형적 거동특성을 실험적으로 살펴보았을 때 공진이 발생하는 공진진동수가 편향되는 것을 관찰할 수 있다(Mahmoodi, 2008). 이러한 비선형적 거동특성은 가진 진동수에 의해 영향을 받으며 과도응답에서 유사 안정(quasi-steady)상태에 도달한다(Vaz, 2013). 위 연구들은 동적해석만 수행하였고 가진 진동수 중심으로만 보의 거동을 해석하였다는 한계가 있다. 따라서 선형 해석과 비선형 해석의 비교, 정적해석과 동적해석에서 특정 변수가 보의 거동에 미치는 영향에 대한 분석을 통합적으로 연구하는 것은 의미가 있다.
본 논문에서 선형적 해석은 감쇠 시스템에 대한 조화 가진의 이론적 접근법을 이용하였으며 비선형적 해석은 Co-rotational 유한요소 시뮬레이션을 이용하였다. 보에 작용한 하중의 크기와 진동수, 시간에 대하여 각각의 해석방법이 보의 거동을 어떻게 표현하는지 그 차이를 알아보았다. 마지막으로 상용 유한요소해석 프로그램을 이용해 3차원 모델의 비선형적 거동특성을 2차원 모델과 비교하였다.
2. 본 론
이 장에서는 비감쇠 시스템 조화가진 상태의 외팔보 거동에 대한 선형적, 비선형적 해석방법을 소개한 후, 각각의 해석방법을 적용하여 하중과 진동수, 시간의 변화에 따른 보 거동의 차이를 비교하고자 한다.
2.1 선형적 해석방법
우선 선형적 해석방법은 외팔보의 2차원 거동을 표현한 식으로서 유도과정은 다음과 같다(Inman,1988).
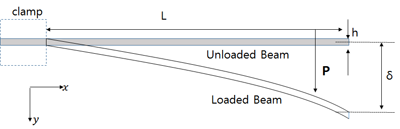
Fig. 1에 한쪽 끝이 고정되어 있고 다른 쪽 끝이 자유단인 보 모델을 간단히 도시하였다. 보 끝단의 변위를 δ, 가진 힘을 P, 2차 단면 모멘트를 I, 강성(stiffness)을 k, 탄성계수를 E, 중력 가속도를 g, 보의 밀도를 ρ, 단면적을 A라고 하였다. Euler-Bernoulli 보 이론을 적용하여 구해지는 보의 δ와 k는 다음과 같다.
 , P=k·δ,
, P=k·δ,  (1)
(1)
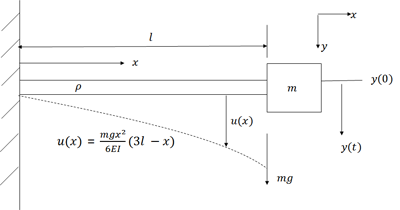
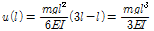
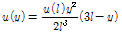
이제 위 결과를 이용하여 보의 질량을 고려한 등가질량 meq와 고유진동수 ωn을 도출하였다. Fig. 2와 같이 보의 끝단에 질량(m)이 주어졌을 때, 이 질량에 의해서 발생하는 보의 변형과 보 끝단의 변위는 다음과 같다.
 (2a)
(2a)
 (2b)
(2b)
위 식을 연립하여 시간에 대해 미분을 수행하였다.
 (2c)
(2c)
 (2d)
(2d)
위와 같이 표현된 보의 속도 식을 보의 운동에너지 식에 대입하였다.
 (3)
(3)

이제 보의 질량 M=σAl을 대입하고 보과 보의 끝단에 매달린 질량()의 운동에너지를 합하면, 다음과 같이 전체 시스템의 운동에너지 식을 얻을 수 있다.
T=Tbeam+Tm (4)

식 (4)를 이용해 끝단에 질량(m)이 매달린 보의 등가질량(equivalent mass, meq)과 고유진동수(ωn)를 구하면 다음과 같은 식으로 나타낼 수 있다.
 (5)
(5)
 (6)
(6)
Fig. 3은 위에서 유도한 값을 통해 보를 감쇠 조화 가진 시스템으로 변환시킨 것을 도시한 것이다. 이 때 구조물에 작용하는 가진을 앞서 예로 들었던 고세장비 항공기의 날개나 헬리콥터 로터 블레이드가 받는 공력으로 가정하면 식 (7)과 같이 cosine 형태의 조화 가진으로 표현할 수 있다.
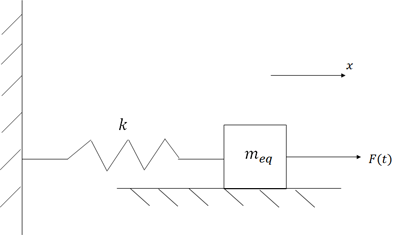
F(t)=F0·cos(ωt) (7)
이때 x방향의 힘과 변형만 존재한다고 가정하고 위 시스템의 지배방정식을 설정하면 다음과 같은 식을 얻는다. 이
때 추가된 감쇠항은 구조물 자체의 감쇠 특성을 고려한 것으로 외부적인 조건이 아니다. 그리고 f0는  , C는 감쇠 계수, ζ는
, C는 감쇠 계수, ζ는  ,
,  이다.
이다.
 (8a)
(8a)
 (8b)
(8b)
이 지배방정식을 해석하여 얻어진 해는 식 (9)와 같다.
 (9)
(9)


위 식의 각 변수들을 대입하여 전개하면 식 (10)과 같이 정상상태 응답과 과도응답의 합으로 표현된다. 이때 x0, ν0는 각각 초기 위치와 초기 속도를 나타낸다. 따라서 초기 조건이 x00, ν00 일 때 아래와 같이 나타낼 수 있다.
 (10)
(10)





이때  이다.
이다.
결론적으로 보 끝단의 최대 변위는 다음과 같다. 이 때 q는 조화가진 시스템에서 진폭을 표현하기 위해 도입한 변수인데, 본 논문에서는 단순히  를 의미한다.
를 의미한다.
 (11)
(11)
2.2 비선형 해석방법
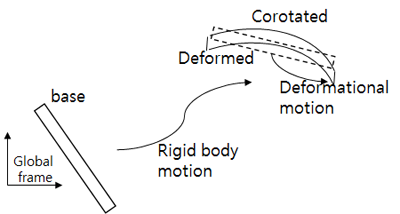
여러 가지 비선형 해석방법 중 본 논문에서는 Co-rotational (CR) 방법을 사용하였다. CR 방법은 물체의 변위(displacement)와 회전(rotation)은 충분히 클 수 있는 반면 물체의 탄성 변형(deformation)은 작다는 가정을 기반으로 하고 있다. 또한 CR 방법은 물체의 거동을 물체의 변위와 회전으로 나타내는 강체 운동과 물체의 변화를 나타내는 변형 운동으로 분리하여 해석한다. Fig. 4는 CR 방법의 원리를 도시하고 있다. 시각적으로 과장되게 표현하였지만 그 원리를 잘 나타내고 있다(Felippa and Haugen, 2005).
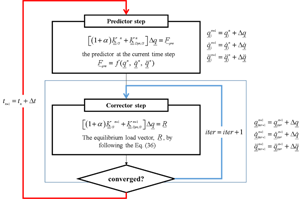
본 논문에서 사용한 CR 방법 기반의 프로그램은 2차원 기하학적 비선형 보 해석이 가능한 Co-rotational Plane Beam with Arbitrary Section과 Co-rotational Plane beam-Dynamic tip load이며 EDISON CSD 프로그램에 내장되어 있는 solver들이다. 이러한 CR 이론 기반의 천이 응답 해석에 적용되는 최종적 지배방정식은 식 (12)와 같다. 이때, M, K는 질량과 강성이고, C는 감쇠를 나타낸다. 관성과 감쇠 행렬은 반복계산을 통해 도출되는 구조물의 변형량과 속도, 가속도 성분에 의해 정의되며 자세한 수학적 정식화 과정은 참고문헌에 나타나 있다(Le and Battini, 2011). 또한 비선형적 시간적분 알고리즘으로 Hilbert Hughes Taylor 기법이 적용되었으며 계산 알고리즘은 Fig. 5에 나타내었다. 식 (12)는 매 시간 간격에서의 이전 수렴 값으로부터 결정되는 감쇠계수를 의미한다.
 (12)
(12)
2.3 결과 및 고찰
본 논문은 외팔보를 설정하여 선형적, 비선형적 방법을 통해 정적, 동적해석을 수행하였다. 각각의 해석결과를 통해 힘의 세기, 진동수, 시간이 외팔보의 거동에 미치는 영향을 규명하였다.
우선 대표적인 고세장비 주익을 지닌 항공기인 고고도무인항공기 Global Hawk의 날개를 일정한 단면의 외팔보로 가정하였고 필요한 각각의 기준 값들은 이로부터 도출하였다. Fig. 6과 같이 상용 모델링 프로그램인 CATIA을 사용하여 날개의 단면 형상을 제도한 뒤 이 단면에 대한 2차 단면모멘트와 면적을 측정하였다. 이때 사용한 물성치가 Table 1에 나타나있다. 탄성계수와 밀도는 알루미늄의 물성을 적용하였다.
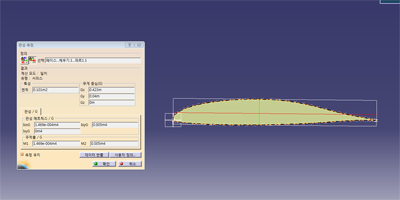
Table 1
Properties of the present beam model
| 길이(m) | 20 |
|---|---|
| 탄성계수(MPa) | 72000 |
| 밀도(kg/m3) | 2700 |
| 2차 단면 모멘트(m4) | 0.0014 |
| 면적(m2) | 0.101 |
| 2D 요소(개) | 30 |
2.3.1 정적해석
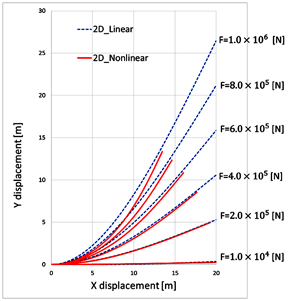
먼저 외팔보에 대해 수직방향 하중의 크기를 바꿔가며 선형적, 비선형적 정적해석을 수행하였다. 이때 하중의 크기는 변하지만 방향은 y방향으로 일정하다.
Fig. 7에 각각의 해석방법으로 얻은 보의 전체 형상의 변형을 힘의 크기에 따라서 비교해 놓았다. 두 해석방법 모두 하중의 크기가 커질수록 보의 변형량이 증가하였다. 선형적 해석은 그 특성상 방향의 x변위가 나타나지가 않고 각각의 보 요소들이 y방향으로만 변위가 일어나 힘의 크기와 y방향 변위 정도가 거의 비례한다. 비선형적 해석의 경우 x방향의 변위가 주목할 만한 것이다. 하중의 크기가 작을 때에는 그 변형이 무시할 만한 수준이라 선형 해석결과와 비교해 보았을 때 거의 비슷한 보의 거동을 보인다. 그러나 하중의 크기가 증가하면 x방향의 변위도 상당히 증가하여 선형 해석결과와 많은 차이를 보인다. 결과를 보면 하중이 커질수록 보의 고정된 끝단을 기준으로 말려 들어가는 형상을 나타내게 되는데, 이는 두 해석방법의 결과가 차이를 보이게 되는 가장 큰 현상이다.
2.3.2 동적해석
정적해석에서는 하중 크기를 변화시켜 가며 선형, 비선형적 방법이 보의 거동을 표현하는데 미치는 영향에 대하여 살펴보았다. 동적해석에서는 가진되어 작용하는 하중의 변수들 중 가진 진동수와 시간을 변화시켜 가며 두 해석방법에 따른 보의 거동차이를 살펴보았다. 우선 보의 고유 진동수를 포함하는 광역 범위의 진동수 비율에 따른 보의 끝단 최대 변위를 살펴보았다. 기준 보의 고유진동수를 예측하면 5.38 rad/s이다. 이 고유 진동수에 대한 가진 진동수의 비율인 r에 따라 보 끝단의 y방향 변위를 선형, 비선형 방법으로 각각 해석하였고 그 결과는 Fig. 8과 같다. 이 때 선형적 해석을 위한 감쇠계수 C값을 설정하여 변수 통제하였고 원리는 다음과 같다. 앞에서도 설명하였듯이 비선형적 해석방법의 시뮬레이션 solver는 매 해석의 시간 간격에서 보의 변형을 고려한 감쇠계수를 다르게 설정하기 때문에 이를 동일하게 선형적 해석에 적용하는 것은 불가능하다고 판단하였다. 그래서 Fig. 9에 나타낸 것과 같이 선형적 해석에서 감쇠 계수를 임의로 설정하면서 안정화된 과도응답을 추적하였고 그 값이 비선형적 해석의 과도응답과 가장 유사할 때의 감쇠계수로 결정하였다. 이 때 진동수는 1rad/s이었으며 실제 변형이 작은 선형구간으로서 감쇠계수 값이 0.0009일 때 선형, 비선형 해석 결과가 매우 유사하였다.
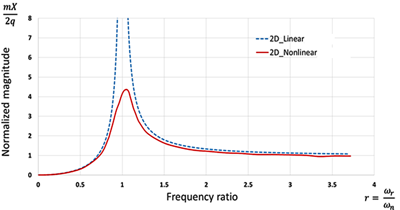
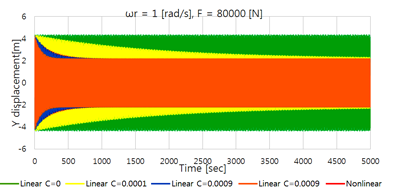
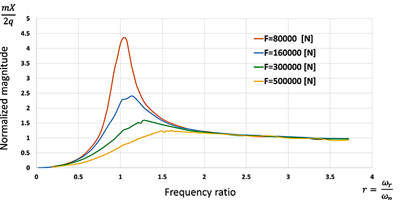
Figure 10
Magnitude of the dimensionless displacement under various loads versus frequency ratio by the present nonlinear analysis
Fig. 8에서 진동수 비율에 따른 보 끝단 변위의 무차원화 값을  로 각각의 해석방법에 대해 표현하였다.
로 각각의 해석방법에 대해 표현하였다.
이 그래프에서 확인할 수 있듯이 선형 해석과 비선형 해석을 비교하면, 진동수 비율이 1에서 벗어날수록 결과가 거의 유사하고, 1에 가까울수록 그 차이가 더 커진다. 참고로 Fig. 10은
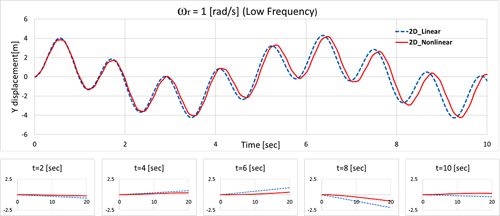
Figure 11
Transverse displacement at beam tip versus time and deflected shape [m] at specific instant under low frequency excitation
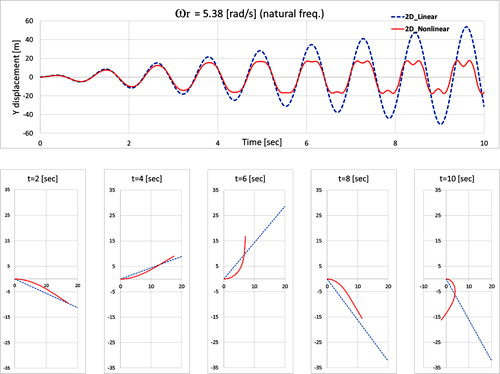
Figure 12
Transverse displacement at beam tip versus time and the deflected shape [m] at specific instant under excitation near at natural frequency
외력의 크기변화에 따른 보의 거동을 비선형적 해석으로 분석한 그래프이며 외력의 크기가 증가할수록 공진진동수가 편향되면서 무차원화된 최대 변위 값이 줄어드는 비선형 거동이 확연하게 관찰되었다.
다음으로 낮은 진동수 영역과 공진 진동수, 높은 진동수 영역에서 시간의 흐름에 따른 보의 실제 거동과 끝단 변위를 살펴보았다. 보의 공진 진동수인 5.38을 기준으로 낮은 진동수 ωr=1rad/s, 높은 진동수 ωr=10rad/s을 설정하여 종동력 80,000[N]을 보의 끝 단에 가하면서 F(t)=F0·cos(ωt)형태의 가진된 하중을 적용하였다.
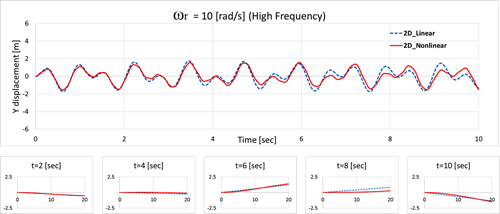
Figure 13
Transverse displacement at beam tip versus time and the deflected shape [m] at specific instant under high frequency excitation
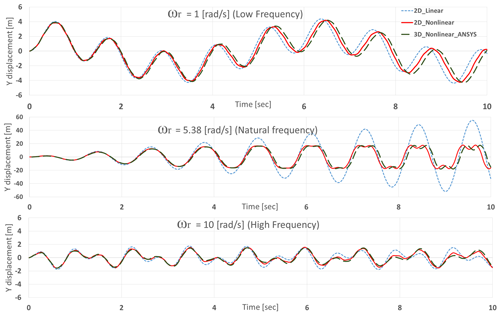
Figure 14
Transverse displacement at beam tip versus time predicted by the 2D-linear, 2D-nonlinear and 3D-nonlinear analysis under the various excitation frequencie
Figs. 11~13에서는 각각 전체 해석시간 10초에 대한 보 끝단의 y축 방향 변위를 살펴보았고, 특정시점에서 전체 보 형상을 snapshot 형식으로 도시해 보았다. 결과를 보면 ωr=1에서 주파수 지연현상이 크게 발생한다. 비선형적 해석에서 해석시간이 길어질수록 끝단 변위의 최대지점 도달 시간이 선형적 해석시간에 비해 늦어지는 모습이 뚜렷하다. 그러나 낮은 진동수 대역에서 두 해석방법의 결과 값에서 변위의 차이는 크지 않았다.
반면에 ωr=5.38=ωn에서는 뚜렷한 주파수 지연현상이 관찰되지 않는 대신 공진현상의 효과로 보의 끝단 변위 차이가 매우 크게 나타났다. 이때 선형 해석과는 달리 비선형 해석방법으로 보의 끝단 변위를 예측하였을 때에는 Fig. 12에서 확인할 수 있듯이 변위 정도가 발산하지 않고 특정한 값을 초과하지 않는다. 그 이유는 실제 공진 진동수에서 보의 형상을 통해 확인할 수 있다. 각각의 형상들은 Fig. 12의 하단부에 그래프로 표현되어 있는데 선형 해석에서 보의 길이 변형에 제한이 없는 것에 비해 비선형 해석에서는 보의 길이 변형은 크지 않고 대신 보가 말려 들어가는 현상이 두드러지게 관측된다. 이 때문에 공진현상 하에서 두 해석결과가 큰 차이를 보이는 것으로 판단된다. 물론 감쇠계수의 효과도 있겠지만 그 영향은 크지않은 것으로 판단된다. ωr=10(rad/s)에서는 Fig. 13에서 확인할 수 있듯이 높은 진동수에서는 주파수 지연현상이 미비하고 보의 변형 또한 작아서 Fig. 12의 결과에 비해 두 방법에 의한 해석결과의 차이가 크지 않다.
마지막으로 2차원, 3차원 해석에서 나타나는 보의 비선형 거동특성 차이를 검토하였고 이것은 2차원 해석의 타당성을 검증하는 차원에서 수행하였다. 실제로 직접적인 실험을 통해 검증하는 것이 가장 확실하겠으나 여건상 3차원 보 거동 해석으로 대체하였고 상용 유한요소해석 프로그램인 ANSYS를 사용하였다. 보의 기하학적 특성은 2차원 해석과 동일하게 설정하였고 하중의 크기와 가진된 주파수 또한 일치시켰다. 결과는 Fig. 14에 도시하였다.
Fig. 14를 보면 전반적으로 2차원, 3차원 비선형 해석결과가 매우 유사한 것으로 보아 2차원 비선형 해석의 정확성을 확인할 수 있으며 일부 구간에서는 2차원 선형 해석결과가 3차원 비선형 해석결과와 거의 일치하는 것으로 보아 그 효율성이 입증되었다. 다만 3차원에서 주파수 지연 현상이 2차원 해석보다 더 현저하고 이 차이는 가진 시간이 길어질수록 커지고 있는 것으로 나타났다. 가진 시간이 긴 상황에서는 2차원 비선형적 해석방법도 그 결과의 타당성에 한계가 있다는 결론을 얻을 수 있다.
3. 결 론
본 논문에서는 가진 하중을 받는 구조물의 거동에 대한 선형 해석과 비선형 해석으로 인한 차이를 비교하기 위하여 다음과 같은 방법을 이용하였다. 고세장비 주익을 지닌 항공기의 날개나 헬리콥터 로터 블레이드 등과 같은 구조물을 외팔보로 가정하고 자유 끝단에 수직으로 외력을 가하였다. 우선 외력의 크기에 따른 구조물의 2차원 거동을 Euler-Bernoulli 보 이론에 기반한 선형적 방법과 Co-rotational 정적해석 시뮬레이션을 이용한 비선형적 방법으로 해석하였다. 각각의 결과들에서 외력의 크기가 커질수록 보 변형의 뚜렷한 차이가 나타났다.
다음은 감쇠 조화 가진 시스템의 이론적 접근법을 이용한 선형적 방법과 Co-rotational 유한요소 시뮬레이션을 이용한 비선형적 방법으로 2차원 보 거동의 동적해석을 수행하였다. 각각의 방법으로 해석한 결과를 살펴보면 공진진동수 근방의 구간에서 대변형과 주파수 지연현상 등 선형적 해석방법과 큰 차이를 보이는 비선형적 거동 특징이 발견되었다. 그 이외의 구간에서는 두 해석결과가 유사하였고 결과적으로 비선형적 동적 거동을 분석할 때에는 주파수 영역과 해석시간의 영향을 고려한 비선형적 해석방법의 중요성을 재고하였다.
본 논문에서 제시된 결과들을 통해 2차원 선형 및 비선형 그리고 3차원 비선형 해석방법에 대한 신뢰성과 효율성 측면의 비교를 할 수 있었다. 먼저 보의 거동이 선형구간에 있을 경우 3가지 해석방법 모두 서로 유사한 결과를 도출하여 결과의 신뢰성 차이가 크지 않다는 것을 확인하였다. 따라서 보가 선형적으로 거동할 때에는 해석시간이 가장 짧은 2차원 선형해석 방법이 시간자원 면에서 강점이 있다고 할 수 있다. 그러나 보의 거동이 비선형구간에 있을 경우 해석방법에 따라 예측 결과가 큰 차이를 보인다. 신뢰성 측면에서는 2차원 비선형 해석이 선형 해석에 비해 훨씬 정확한 결과를 도출하고 이는 3차원 비선형 결과값과 유사할 정도의 정확성이었으며, 시간자원 면에서 2차원 비선형해석이 3차원 비선형 해석에 비해 효율적이었다. 결론적으로 구조물의 거동이 비선형적일 경우 2차원 비선형 해석방법의 정확성과 효율성을 검증할 수 있었다.
비록 본 논문에 제시된 비선형 해석이 상대적으로 복잡한 계산과정으로 인해 시간자원 면에서 비효율적일지라도 구조물의 안전성과 경량화를 고려한다면 그 중요성을 간과할 수 없을 것이다. 향후 이와 관련된 연구를 통하여 구조물 거동의 비선형 해석이 안전성과 경량화에 미치는 영향을 구체적으로 분석하고, 실제 실험 데이터와 시뮬레이션 결과를 비교하여 타당성을 더욱 확보하고자 한다.
