

1. 서 론
현재 무공해 운송수단으로서 자전거는 우월한 지위에 있으며 자전거 도로의 확충으로 인하여 관련된 산업이 증대되고 있는 실정이다. 또한 화석연료가 점차 고갈되면서 무공해 대체 수단인 자전거 대한 관심이 증가하고 있다. 더불어 자전거가 생활에 밀접한 관련을 맺어감에 따라 성능은 물론, 주행감이 좋은 자전거를 추구하기 시작했다. 이에 따른 자전거의 수요는 폭발적으로 증가하고 있으며 교체 주기도 점차적으로 짧아지고 있다.
자전거에서 안장의 쿠션은 운전자(rider)의 승차감을 결정하는 중요한 요소이다. 즉, 자전거용 안장은 주행의 질(ride comfort)을 높이기 위하여 노면의 진동을 흡수하도록 설계되어야 한다. 최근에는 안장에 닿는 인체 접촉부의 통풍 및 압력을 감소시킬 수 있는 건강 보호기능이 강화되고 있으며, 안장 자체의 외형 변화가 점차적으로 개선되고 있는 추세이다. 현재는 인체에 미치는 부작용이 최소화되는 안장의 형상으로 설계되고 있으며, 폭 사이즈 및 형상을 통한 변화로만 한정되어 있는 실정이다.
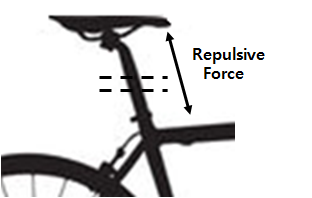
자전거용 안장은 스프링 방식과 레일 방식으로 크게 두 가지로 나누어진다. 전자는 몸 전체의 하중이 안장에 수직으로 부담하도록 스프링 장치가 설치된다. 후자는 운전자의 자세를 낮추고 고속용으로 사용되며 장거리용 및 산악용에 적용된다. 이러한 레일 방식에서는 페달링(pedaling)시 수직 상하의 출렁거림이 없어 고속용으로 사용하기에 적합하다. 하지만 운전자의 안장에 어떠한 쿠션(cushion) 기능도 제공하지 못하고 있다. 레일방식에 완충장치를 보완하기 위하여 안장 기둥(seat-post) 위치에서 자석의 척력을 활용하는 것도 한 가지 방법이다. 이러한 자석의 척력을 이용하면 소음발생이 적고 유지보수가 최소화되며 설치 방식이 용이한 것이 장점이다.
본 연구에서는 유한요소해석을 상용 프로그램에서 사용하여 레일 방식 안장과 그 지주 사이에 완충장치를 적용하고자 영구자석의 척력을 예측하였다. 이로부터 자석의 크기가 결정되었고, 이에 상응하는 등가의 스프링 강성을 산정하여 자전거의 동역학 모델에 이식하는 과정을 설명하였다. 또한 영구자석의 자전거 완충장치에의 적용성을 구체화하고자 주행로의 비평탄도 조건에 따른 자전거의 동역학적 거동을 살펴보았다.
2. 본 론
이 장에서는 영구자석의 척력을 산정하기 위한 유한요소 해석 모델의 설정과 이로부터 구한 해석치를 자전거의 완충 시스템에 이식하는 과정을 소개할 것이다. 이식 후에 자전거의 동역학적 모델을 설정하고 영구자석의 크기에 따른 동적 거동을 살펴볼 것이다(Waechtr et al., 2002).
2.1 해석 모델
본 연구에서 해석 모델은 안장 쿠션 시스템에 척력을 적용하기 위하여 공기가 포함되는 유체 모델과 자석 모델이 결합되어 구성되었다. 즉, 자석 모델은 강자성체인 영구자석의 자기 특성치가 가장 우수한 네오디뮴(NdFeB) 자석과 자기 차폐구조 내부에 공기가 충진되는 조합을 이용하였다. 유한 요소해석은 상용 프로그램을 통하여 자기력 해석을 수행 하였으며, 이로부터 도출된 자기 척력을 이용한 충격완화 시스템을 자전거 구조에 적용함으로써 신개념의 안장 쿠션을 설계하고자 한다(Ansys, 2015).
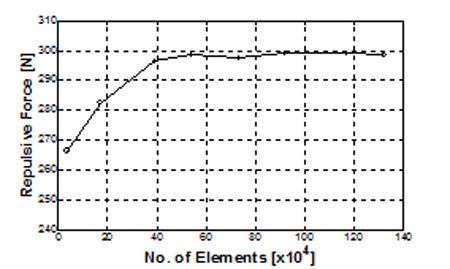
Figure 1
Repulsive force for the analysis depending on the number of element meshes for the 50×40×15T
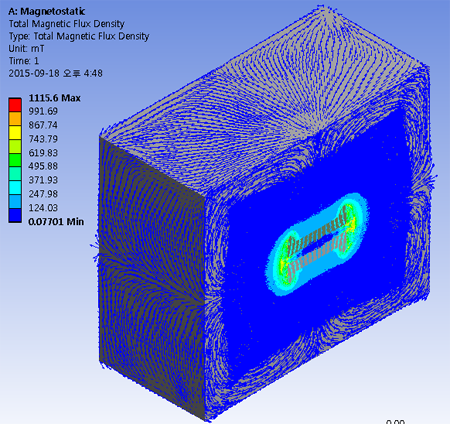
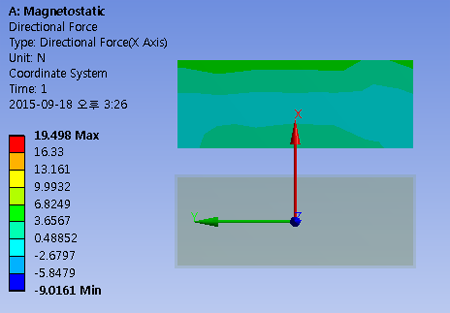
해석 대상의 일례로서 영구자석의 크기가 50×40×15T와 50×40×30T인 것을 3~7mm 간극을 변화시키면서 같은 극을 마주보고 수직방향으로 척력이 작용하도록 모델을 설정 하였다. Fig. 1은 50×40×15T 모델에서 유한요소의 격자를 사각기둥 요소(quadrangular element)로 했을 때 격자의 수에 따른 척력의 변화를 관찰한 것이다(Hughes, 1987). 척력의 변화가 거의 없는 안정적인 영역에서 격자의 수를 약 50만개로 설정하여 모델의 신뢰성을 확보하였다. Fig. 2와 3은 이를 해석하여 얻은 자속 밀도와 척력을 보여주고 있다.
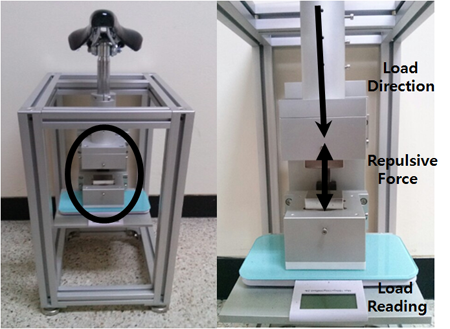
유한요소 해석치의 정확도를 검증하고자 이러한 자석들을 장착할 수 있는 시험 장비를 제작하여 척력을 실측하였으며, 이를 Fig. 4에 나타냈다. 이 시험 장치는 서로 마주보고 있는 자석에 척력이 작용할 때 안장에 수직력을 가하면 그 하중을 전자 저울에서 측정하도록 되어 있다. Table 1은 이 해석치와 실험치를 비교한 것을 나타내고 있으며, 약 2.8%의 차이를 보이고 있어 해석 모델의 타당성이 검증됨을 알 수 있다(Yoon et al., 2015).
2.2 자전거 수치해석 모델
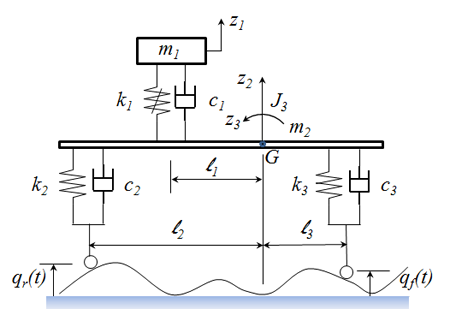
자전거의 수치해석 모델을 설정하기 위하여 다음과 같은 사항을 가정하였다. 첫째, 본 연구의 영구자석 척력을 이용한 완충장치는 Fig. 5와 같이 안장 기둥(seat-post)에 설치 하였고 자전거에 장착된 스프링과 댐퍼는 선형으로 작동한다. 둘째, 운전자의 수직운동 z1, 프레임의 내부에 존재하는 무게 중심에서의 수직운동 z2와 회전운동 z3을 가지는 3 자유도 (degree of freedom)계로 모델을 설정하였다. 셋째, 전륜과 후륜에서 각각 바퀴의 하부질량(unsprung mass)을 프레임에 포함시켰다. 넷째, 주행하는 도로는 비평탄로(uneven road) 이며 바퀴의 중심이 항상 도로의 지면과 접촉한다. 다섯째, 동역학 모델의 회전 운동은 주행방향의 피칭(pitching)만 허용하였다. 상기의 가정들을 적용한 동역학적 모델을 Fig. 6에 나타냈다.
제시한 수치해석 모델의 운동방정식을 유도하기 위하여 운전자 및 프레임의 운동에너지 T와 프레임에 장착된 스프링의 탄성에너지 V를 고려하였다. 비보존력은 프레임에 장착된 댐퍼의 감쇠력과 도로의 요철에 의한 힘 Q를 산정하였다. 이로부터 산정된 에너지들을 가지고 라그랑지 식(lagrange’s equation) (1)을 활용하면 다음의 운동방정식 (2)가 도출된다.
여기서, 라그랑지안(lagrangian) L=T-V이고, M은 관성 행렬, C는 감쇠행렬, K는 탄성행렬, t는 시간, '는 시간 t에 대한 미분을 나타낸다. 각각의 행렬은 다음과 같이 표현된다.
(3c)
(3d)
여기서, m1은 운전자의 질량, m2는 전후륜을 포함하는 프레임의 질량, J3는 전후륜 상부에서의 프레임의 무게 중심 G에 대한 관성 모우멘트, k1은 자석의 척력을 사용한 안장 기둥의 등가 스프링 강성 , k2는 후륜의 상부의 등가 스프링 강성, k3은 전륜의 상부의 등가 스프링 강성, c1은 안장 기둥의 등가 감쇠 계수, c2는 후륜의 상부의 등가 감쇠 계수, c3은 전륜의 상부의 등가 감쇠 계수, l1은 운전자 질량 중심으로부터 프레임 무게 중심 G까지의 수평 거리, l2는 후륜의 축으로부터 프레임 무게 중심 G까지의 수평 거리, l3은 후륜의 축으로부터 프레임 무게 중심 G까지의 수평 거리, qr은 후륜의 비평탄면 주행시 변위, qf는 전륜의 비평탄면 주행시 변위, z1은 운전자의 수직 변위, z2는 전후륜 완충 장치 상부의 수직 변위, z3은 완충 장치 상부에서 프레임 무게 중심 G의 회전 변위이다. 외력 Q는 전후륜의 변위와 그 시간 변화율을 가지고 있어 두 개의 항으로 다음과 같이 분리하였다(Cossalter et al., 2006).
여기서, 행렬 K*와 C*는 다음과 같다.
식 (2)를 상태 공간(state space)으로 변환하여 다음과 같은 상태 방정식을 만들었다(Ogata, 2014).
여기서, x는 상태 변수 벡터, y는 출력 변수 벡터, u는 주행면 요철에 의한 입력 변수 벡터로서 다음과 같다.
(8b)
(8c)
또한 A는 시스템 행렬, B는 입력 행렬, C는 출력 행렬, D는 직접 전달 입력 행렬, 윗 첨자 T는 전치(transform)를 각각 나타내며 각각의 행렬은 다음과 같이 표현된다.
2.3 자석의 크기 선정
최종적으로 자전거의 안장 기둥에 적용할 영구자석은 유한요소법 시뮬레이션을 통하여 자석의 크기에 따른 척력이 먼저 산정되어야 한다. 그 후에 등가의 스프링 강성을 수치해석 모델에 이식하여야 한다. 등가 스프링 강성 값의 신뢰성을 확보하기 위하여 자석의 크기가 50×40×15T와 50×40×30T인 것을 간극이 3mm부터 7mm까지 변할 때 척력의 실험치와 해석치를 Fig. 7에 비교하였다. 실험치의 확보를 위하여 앞서 설명한 Fig. 4의 시험 장비를 사용하였다. 실험치는 약 2~5%의 해석치와의 차이를 보이고 있으며 거의 선형성을 가지고 있음을 관찰하였다.
이에 따른 등가 스프링 강성 값을 계산하고자 간극의 변화량 ∆δ=1mm일 때 작용하는 척력의 변화량 ∆F를 실험치와 유한요소 해석치를 Table 2와 3에 비교하였다. 각각의 차이가 평균 2.2%와 3.9%이며 스프링 강성 값의 산정에 신뢰도를 줄 수 있음을 알 수 있다. 스프링 강성 값은 비선형성 거동을 하고 있고 간극이 작을수록 강성 값이 커짐을 알 수 있다.
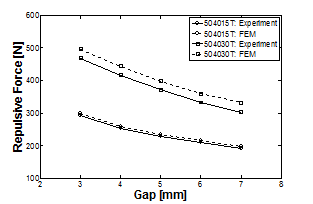
Table 2
The comparison of experimental and FEM values of repulsive force and deformation for magnetics 50×40×15T
| 50×40×15T ∆F | Gap ∆δ(mm) | |||
|---|---|---|---|---|
| 3~4 | 4~5 | 5~6 | 6~7 | |
| Experiment (N) | 39.2 | 24.5 | 18.6 | 17.7 |
| FEM (N) | 39.8 | 23.9 | 19.1 | 17.3 |
| Difference (%) | 1.5 | 2.4 | 2.7 | 2.2 |
Table 3
The comparison of experimental and FEM values of repulsive force and deformation for magnetics 50×40×30T
| 50×40×30T ∆F | Gap ∆δ(mm) | |||
|---|---|---|---|---|
| 3~4 | 4~5 | 5~6 | 6~7 | |
| Experiment (N) | 52.3 | 44.2 | 39.2 | 29.4 |
| FEM (N) | 50.5 | 46.9 | 37.8 | 28.7 |
| Difference (%) | 3.4 | 5.7 | 4.0 | 2.4 |
다음 2.4절에서 논의할 운전자의 질량 60~100kg을 적용할 것을 염두에 두고 1kN 이상의 척력을 발생시킬 수 있는 자석을 크기를 결정하고자 한다.
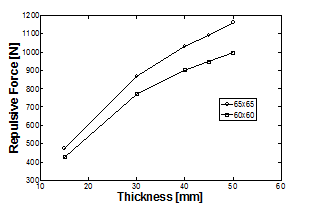
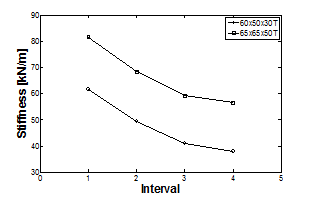
자석의 면적이 60×60과 65×65인 것에 대하여 두께가 15, 30, 40, 45, 50으로 변화시켜 척력을 구하였다. Fig. 8은 자석간의 간극이 3mm일 때의 척력을 구한 것이다. Table 2와 3에서 강성을 산정한 것처럼 60×60×30T와 65×65×50T인 자석에 대하여 간극 간격이 ∆δ=1mm일 때 척력을 산정하여 이에 상응하는 등가의 스프링 강성을 Fig. 9에 나타냈다. Fig. 7과 비교하면 자석이 커질수록 비선형적인 특성을 나타냄을 예상할 수 있다.
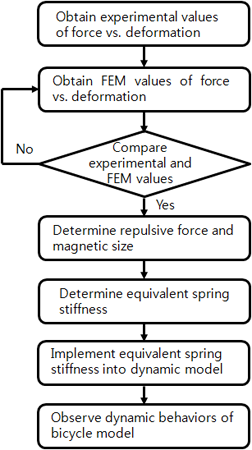
본 논문에서 자기력 해석 및 실측으로부터 시작하여 자전거의 동역학 모델을 설정하여 거동을 예측하는 일련의 과정을 Fig. 10에 정리하였다.
2.4 수치예제 결과 및 고찰
본 논문에서 제시하는 수치해석 모델은 2.2절에서 언급하였고 자전거의 동역학 모델에서 설정한 제원은 다음과 같다. m1=100kg, m2=10kg, J3=1kg․m2, 적용할 자석의 등가 스프링 강성 k1=59, 65, 82, 92, 102kN/m, k2=300kN/m, k3=200kN/m, c1=1.9×10-4, kN․s/m, c2=0.5kN․s/m, c3=0.75kN․s/m, l1=0.45m, l2=0.66m, l3=0.36m 이다. 스프링 강성은 Fig. 7과 9에서 본 바와 같이 자석의 크기에 따라서 선형성의 유무가 좌우된다. 본 해석에서는 운전자가 탑승하여 자석의 간극이 최소 3~4mm일 때를 최대 등가 강성으로 설정하여 선형적인 해석을 수행하였다. qf와 qr은 전후륜의 비평탄면 주행 가진(excitation) 입력으로 다음과 같이 설정하였다.
 (15)
(15)
즉, 전후륜이 반삼각 범프(half-triangular bump)를 통과할 때 동적인 거동을 살펴보았다. Fig. 11부터 16은 자석의 면적이 65×65에서 두께를 30, 40, 50mm를 변화시켜 자석의 간극이 3~4mm일 때 도출한 스프링 강성 값이 각각 59kN/m, 65kN/m, 82kN/m이며, 이들을 자전거 모델에 이식하여 동적 반응을 살펴보았다.
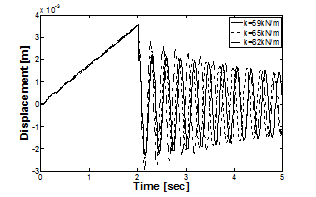
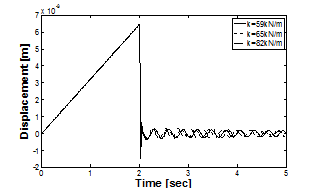
Figure 12
Dynamic responses in the front reach for bumping on the front wheel depending on magnetic size
Fig. 11부터 13은 전륜이 범프를 통과할 때의 동적 응답을 보여 주고 있다. Fig. 11와 12을 비교하면 범프를 통과한 직후에 프레임의 수직 변위가 안장 지주의 변위보다 작음을 알 수 있다. 안장의 지주도 매우 작은 2mm 이하의 변위를 나타내고 있다. Fig. 13은 범프를 통과하기 전후에 피칭(pitching)의 변위가 1°이하임을 알 수 있어 자전거 시스템이 매우 안정함을 알 수 있다. 하지만 범프 직후에 수직 변위의 감쇠의 정도는 자석 완충장치의 차폐 및 공기의 충진 조건에 의해서 좌우될 것으로 예상한다. 현재의 제원에서는 변위가 미미하기 때문에 주행 안정감에 큰 영향을 미치지 못하고 있음을 알 수 있다.
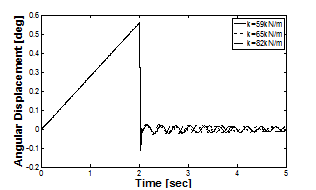
Figure 13
Dynamic responses in the horizontal top for bumping on the front wheel depending on magnetic size
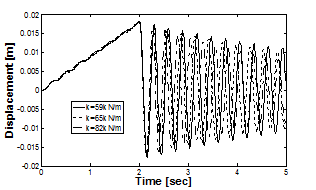
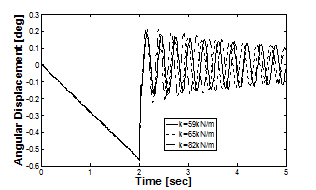
Fig. 14부터 16은 후륜이 범프를 통과할 때의 동적 응답을 보여 주고 있다. Fig. 14와 15를 보면 전륜이 범프를 통과한 경우와 같이 프레임에서 수직 변위가 안장 지주의 변위보다 작음을 알 수 있다. 이 때의 변위도 매우 작은 2mm이하로 관찰 되었다. Fig. 16은 전륜이 범프를 통과한 경우와는 반대로 피칭의 방향이 반대이고 회전 변위가 전륜이 범프를 통과할 때 보다 2배가량 큼을 알 수 있다.
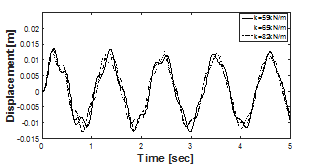
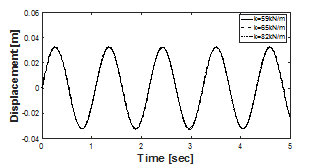
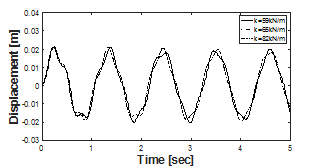
또 다른 주행 해석을 위하여 운전자가 20km/h의 속도로 정현파의 파동 길이(sinusoidal wavelength)가 6m이고 최대 높이가 0.05m 굴곡로를 주행한다고 가정하고 동적 거동을 조사하였다. Fig. 17과 19에서는 각각 전후륜이 굴곡로를 통과시 안장 지주와 프레임의 수직 변위가 스프링 강성의 변화에 따라 서로 다른 거동을 하지만 그 차이는 매우 미미함을 알 수 있다. 전륜이 굴곡로를 통과하면 후륜에서와는 달리 프레임의 변위는 거의 차이가 없음을 Fig. 18에서 관찰할 수 있다.
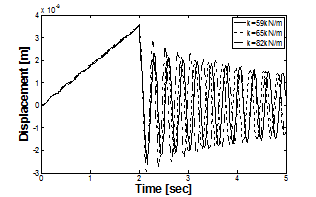
Figure 15
Dynamic responses in the front reach for bumping on the rear wheel depending on magnetic size
3. 결 론
본 논문에서는 자전거의 안장 지주에 영구자석의 척력을 이용하여 완충장치를 설치하고 동역학적인 거동을 살펴보았다. 이를 위하여 영구자석의 척력을 산정하고자 상용프로그램을 이용하였다. 유한요소법으로 구한 해석치의 신뢰도를 확보하기 위하여 실험장비로부터 측정한 실험치와 유한요소 해석치를 비교하였다. 실제 자전거 운전자의 체중를 견딜 수 있는 척력을 구하고자 여러 가지 크기의 자석에 대하여 자기력 해석을 수행하였다. 그 후에 3 자유도계의 자전거 동역학 모델을 완성 하고 자석의 크기에 상응하는 등가 스프링 강성 값을 모델에 이식하였다.
자전거의 동역학 모델에서 전륜과 후륜은 주행면의 비평 타도에 의한 입력을 부담하도록 하였다. 전륜과 후륜이 독립적 으로, 또는 동시에 반삼각 범프(half-triangular bump)와 정현파 굴곡로(sinusoidal road)를 통과할 때의 동적 거동을 살펴보았다.
전륜과 후륜이 범프를 각각 독립적으로 통과한 직후 모두 안장의 수직 변위는 프레임의 수직 변위보다 큼을 관찰하였다. 그러나 주행 방향의 피칭은 전륜과 후륜이 각각 독립적으로 통과하면 피칭의 각도는 서로 상반된 방향으로 거동을 한다. 전후륜이 동시에 범프를 통과하면 피칭은 연속적으로 양과 음의 방향으로 번갈아 피칭 운동을 함을 알 수 있었다. 정현파 굴곡곡를 주행할 때의 안장 지주와 프레임의 수직 변위는 동적 거동의 파형이 자석의 크기가 변하여도 거의 차이가 없음을 관찰하였다.
본 연구에서는 자석의 척력을 산정하여 자전거의 완충 시스템을 보다 구체화할 수 있는 기반을 마련하였다. 또한 향후 자전거의 동역학적 모델의 자유도 수를 증가시키고 감쇠의 사양이 확정되면 보다 정밀한 동적 거동을 예측할 수 있는 도구로 활용될 수 있을 것이다.
