

1. 서 론
현대 전장에서 항공기를위협하는 주요 무기로는 적외선 유도 미사일과 레이더 유도 미사일이 있다. 그 중에서도 1967년 부터 1993년까지 미사일에 의해 격추된 항공기 중 89%가 적외선 유도 미사일에 의해 격추되었다는 통계(Mahulikar et al., 2007)는 적외선 유도 미사일이 항공기에 얼마나 큰 위협이 되는지를 알려준다. 이는 일반적으로 레이더 유도 미사 일이 더 긴 사거리와 높은 속력을 갖고 있음을 고려하면 특이 할 만한 사항이다. 이렇듯 적외선 유도 미사일이 항공기에 더 치명적인 이유는 적외선 유도 방식을 사용하는 경우 대상 항공기에서 공격을 인지하는 것이 어렵기 때문이다.
레이더유도미사일은능동(active), 반능동(semi-active)의 유도 방식에 관계없이 공격을 수행하는 미사일 혹은 항공기가 대상 항공기에 레이더 전파를 발신하고 반사되는 전파를 수신 하여 유도를수행한다. 따라서 공격당하는 항공기에서 적 레이더 전파를 수신하는 RWR(radar warning receiver)과 같은 장비를 장착한 경우 공격을 사전에 인지하고 이에 대비하여 회피기동을 수행하고 채프(Chaff)를사출하는 등 레이더 유도를 기만하여 피격될 가능성을 줄일 수 있다. 이에 따라 대부분의 전투기들이 RWR과 채프 사출기를 장비하여 이에 대비하고 있다.
그러나 적외선 미사일은 대상 항공기에서 자연히 방출되는 적외선 신호로 유도되므로 공격하는 과정에서 신호방출이 없다. 따라서 MAW(missile approach warning)이라는 별도의 장비를 사용해야 한다. MAW는 펄스 도플러 레이더 혹은 적 외선 센서를 이용하여 접근하는 적외선 유도미사일을 추적하 거나 적외선 유도 미사일의 모터에서 발생하는 자외선을 감지 하여 적외선 유도 미사일이 접근 중임을 알려준다. 또한 항공 기는 이 정보를 바탕으로 적외선 유도 미사일을 기만할 수 있는 플레어(flare)를 사출하거나 DIRCM(directional infrared counter measure)과 같은 적외선 기만장치를 작동시킨다.
그러나 MAW는 전 방위를 지속적으로 감시해야 하고 크기가 작은 적외선 유도 미사일을 탐지해야 하는 특성 상 오탐지율이 높고 이를 줄이기 위해 고가의 센서와 알고리즘이 적용됨에 따라 가격이 상승하여 현재는 F-22, F-35, V-22와 같은 일부 고가의 항공기에만 도입이 진행되고 있으며 국내에서 사용되는 군용 항공기에는 적용된 바가 없다. 또한 근거리에서 발사되는 적외선 미사일의 특성 상 MAW를 설치하여 적외선 유도 미사 일의 존재를 인지하여도 회피기동과 플레어 사출 등을 통해 항공기의 생존성을 얼마나 증가시킬 수 있는지는 공개된 연구를 통해 알려진 바가 없다.
따라서 본 연구에서는 MAW의 효용성을 평가하기 위해 항 공기에 MAW를 장착하여 적외선 유도 미사일의 접근을 인지 하고 회피기동을 수행할 경우 항공기의 생존성이 얼마나 증가 하는지를 평가하였다. 기존 연구에서 사용되던 탐지 거리 (lock-on range; Mahulikar et al., 2007) 개념에는 항공 기의 회피기동에 대한 영향이 포함되어있지 않으므로 Rao와 Mahulikar(2005)가 제시한 위험 거리(lethal range)의 개념으로 생존성을 평가하였다. 그리고 위험 거리의 평가 과정 에서 Kim 등(2014)과 같이 항공기의 적외선 신호를 비등방 으로 분석하였으며, Kim 등(2017)이 연구에 적용한 것과 같이 유도 미사일의 항력을 고려한 미사일 속도 감소도 고려하여 위험 거리를 평가했다. 대상 항공기로는 고도 5km 상공에서 마하 0.9로 비행하는 전투기를 사용했으며, Kim 등(2016)의 연구에서 사용된 항공기 탐지 거리를 적용하였다. 변수로는 항 공기가 위협을 탐지하는 거리와 위협 탐지 시 수행하는 회피기 동의 가속도를 설정하였으며, 이를 통해 회피기동을 수행할 경우 위험 거리가 얼마나 감소하는지를 분석하였다.
2. 본 론
2.1. 항공기 생존성 평가지표 및 도출과정
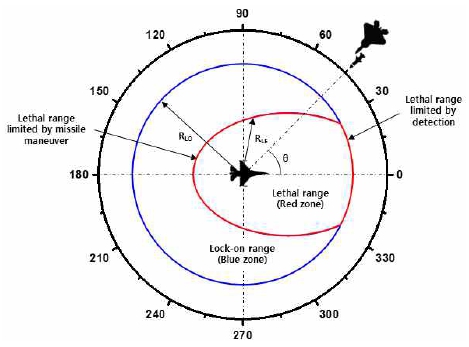
본 연구에서 사용한 생존성 평가지표는 Rao와 Mahulikar (2005)가 도출한 위험 거리이다. 이는 탐지 거리에서 한 단계 더 발전한 개념으로 목표 항공기를 탐지하여 발사된 미사일도 항공기가 이동함에 따라 이를 격추하지 못하고 운동에너지를 상실할 수 있으므로 미사일이 항공기를 추적하는 개념까지 포함하여 실제로 미사일이 항공기에 위협을 줄 수 있는 거리를 나타낸다. Fig. 1에 나타난 것과 같이 파란색 원으로 나타난 탐지 거리와 빨간색 원으로 나타난 위험 거리를 비교하면 전방 에서는 탐지 거리와 미사일에 의해 격추될 수 있는 위험 거리가 동일하지만 후방에서는 고속으로 비행하는 항공기를 미사일이 추적해야 하므로 탐지 거리에 비해 위험 거리가 작아지는 것을 알 수 있다.
위험 거리를 도출하는 과정은 Kim 등(2016)의 연구와 Kim 등(2017)의 연구에 자세히 설명되어 있으며 본 연구에 서도 동일한 방법을 사용했다. 본 연구와 기존 연구의계산 과정 에서의 차이는 미사일 유도과정에서 항공기 회피기동의 고려 여부에 있으며 위험 거리 도출과정에는 직접적인 관련이 없다. 위험 거리 계산은 항공기의 방위각 별로 정의된 탐지 거리에서 시작된다. 먼저 해당방위각에서 미사일이 항공기로부터 탐지 거리만큼 떨어진 점에서 발사되어 항공기를 향해 유도되는 과정을 해석하고 미사일이 항공기를 요격하지 못한 경우 탐지 거리에서 단위 거리만큼 더 가까운 거리에서 발사된 것으로 가정하여 다시 해석을 수행한다. 이 과정을 미사일이 항공기를 격추시킬 수 있을 때까지 계속해서 반복하면 해당 방위각에 대해 미사일이 항공기를 실제로 격추할 수 있는 위험 거리를 도출할 수 있게 된다. 그리고 이 계산을 각 방위각에 대해 순차 적으로 수행하면 방위각 별 항공기의 위험 거리를 도출할 수 있다.
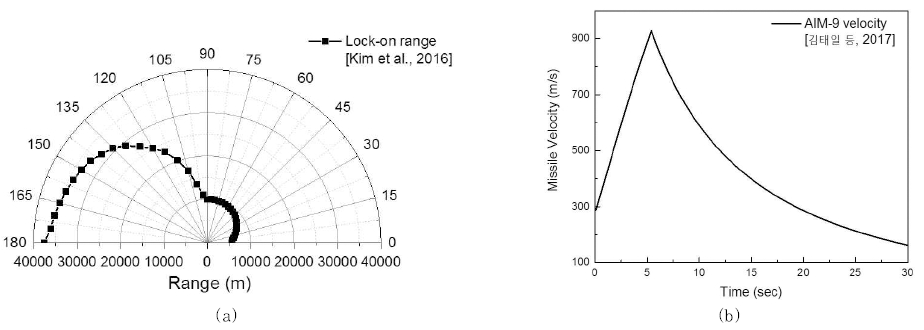
본 연구에서 계산 조건으로 사용된 탐지 거리와 시간에 따른 미사일 속도는 Fig. 2와 같다. Kim 등(2016)의 연구에서 도 출된 것과 같이 고도 5km 상공을 마하 0.9의 속도로 비행 하는 전투기의 적외선 신호를 토대로 도출된 탐지 거리를 사용 하였으며 미사일의 속도로는 Kim 등(2017)의 연구에서 도출 된 고도 5km에서의 AIM-9 미사일의 속도를 적용하였다. 탐지 거리의 경우 중적외선과 원적외선을 모두 사용하는 미사일로 고려하여 도출하였으며, 항공기의 투영 면적이 작은 정면에서는 6km, 배기구가 위치해 온도가 높은 후방에서는 37km 수준 이다. AIM-9 미사일의 속도는 마하 0.9로 비행하는 항공기 에서 발사된 것으로 가정하여 5.2초의 초기 가속구간동안 마하 3.2 수준으로 가속되며 이후 항력에 의해 서서히 감소 하는 것으로 모델링하였다. 또한 미사일이 발사된 지 30초가 지나면 대상 항공기에 비해 미사일의 속도가 느려져 추적이 불가능하므로 위험 거리 도출과정에서 추적 과정은 발사 후 30초 동안만 수행하였다. 그리고 항공기 신호가 대칭이므로 위험거리의계산은0°부터180°까지5° 간격으로수행하였으며 위험 거리 도출을 위한 거리 증분은 10m로 설정하였다.
2.2. 항공기 회피기동을 포함한 미사일 유도모델
기존 연구에서는 위험 거리를 도출하는 과정에서 항공기는 적외선 유도 미사일의 접근을 인지하지 못하고 일정한 방향과 속도를유지하는것으로가정하였다(Rao et al., 2005). 그러나 본 연구에서는 항공기가 미사일의 접근을 인지하고 미사일과 반대 방향으로 회피기동을 하는 것을 고려하였으며 전체적인 유도 과정은 Fig. 3에 나타난 것과 같다. 먼저 미사일은 초기 위치에서 출발한 이후 지속적으로 항공기와 미사일의 상대 각도인 Φ를 계산하고 비행경로가 가 되도록 자세를 수정 하여 항공기를 향해 접근한다. 이렇게 모델링할 경우 비례항법 제어를 적용한 미사일과 유사한 비행궤적을 갖게 된다. 그리고 항공기의 경우 초기에 미사일의 접근을 인지하지 못한 상태에 서는 0° 방향으로 일정한 속도로 비행하지만 MAW가 미사일 접근을알리는 이후에는미사일의접근방향에서벗어나기 위해비행경로가 가되도록지속적으로선회하며선회과정 에서 항공기 속도의 절댓값은 변하지 않는 것으로 가정하였다. 또한 선회 과정에서 항공기는 시간 증분 Δt당 Δθf만큼 방향을 바꿀 수 있는 것으로 모델링하였으며 이는 항공기의 기동성을 고려한 과 항공기 속도에 의해 결정되며 아래와 같이 정의 하였다.(1)
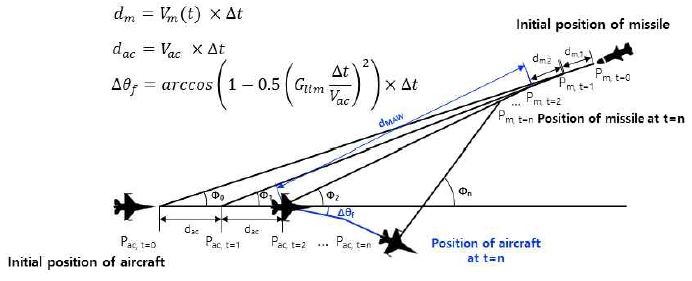
본 연구의 주요 변수인 와 에 대하여 는 5, 6, 7km를 적용했으며 마하 0.9로 비행하는 전투기의 최대 기동성능을 고려하여 은 3, 5, 7G로 설정하였다.
2.3. 항공기 회피기동에 따른 생존성 분석
먼저 항공기가회피기동을수행하지않을 때탐지거리와위험 거리의 차이는 Fig. 4에 나타난 것과 같다. 기존 연구에서 밝혀진 것과 같이 항공기의 전방에 대해서는 미사일과 항공기가 마주보며 기동하고 있으므로 접근속도가 빨라 탐지 거리에서 미사일을 발사할 경우 항상 항공기를 요격할 수 있다. 따라서 탐지 거리와 위험 거리가 동일하게 나타났다. 그러나 발사 각 도가 60°를 넘어감에 따라 미사일이 항공기를 따라 기동해야 하는 거리가 길어져 탐지 거리와 위험 거리에 차이가 발생하게 된다. 따라서 이 영역에서는 미사일의 추진 성능에 의해 항공 기의 생존성이 증가하는 것으로 볼 수 있다. 특히 탐지 거리와 위험 거리의 차이가 가장 큰 곳은 항공기를 후단에서 추적해야 하여 접근속도가 가장 작은 180° 영역이다. 고도 5km 영역은 상대적으로 항력이 큰 고도이며 이로 인해 미사일이 급격히 에너지를 잃어 후방에서의 위험 거리는 5km 수준으로 나타났다.
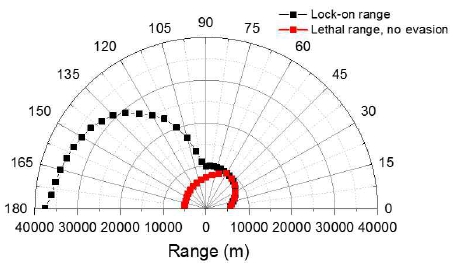
Fig. 5는 8km 거리, 60° 방위각에서 발사된 미사일에 대해 항공기의 회피기동 유무에 따라 항공기와 미사일의 비행경로를 나타낸 것이다. 먼저 항공기가 회피기동을 하지 않는 경우 미사일이 항공기의 경로를 추적하여 12.1초 이후 항공기를 격추하는 것으로 나타났다. 반면에 항공기가 접근하는 미사일을 5km 거리에서인지하고 미사일과반대방향으로 각각 3G, 5G의 회피기동을 수행하는 경우 미사일의 속도가 항력에 의해 줄어 듦에 따라 30초가 경과한 후에도 미사일이 항공기를 격추시키지 못하는 것으로 나타났다. 이로 인해 회피기동을 수행하는 경우 60°에서 9.58km인 위험 거리가 감소할 것을 예측할 수 있다.
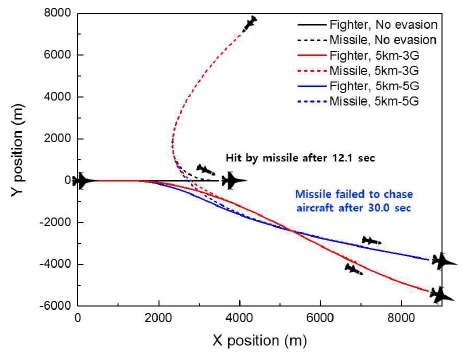
Fig. 5
Change in flight path of aircraft and missile with evasive maneuver when missile launch position is 8km, 60°
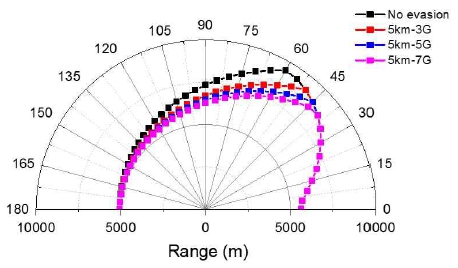
가 5km인 경우에 대해 기동성능에 따른 위험 거리의 변화는 Fig. 6에 나타난 것과 같다. 먼저 전방의 경우 접근속 도가 매우 빠르며 미사일로부터 회피하기 위해 항공기가 방향을 전환하는 데에 시간이 오래 걸리므로 회피기동을 수행하여도 위험 거리가 감소하지 않는 것으로 나타났다. 또한 전방은 항공기 투영 면적이 상대적으로 작고 공력가열에 의한 신호가 지배적이므로 미사일의 추진성능에 비해 발사가 가능한 탐지 거리가 짧은 것도 영향이 있다. 회피기동에 따라 위험 거리가 감소하기 시작하는 지점은 45° 근방부터이며 이 방위각부터 Fig. 5에 나타난 것과 같이 항공기의 회피기동으로 인해 추적 거리가 멀어지는 것의 영향이나타나는 것으로판단된다. 이러한 회피기동의 영향은 90° 부근을 지나 후방으로 갈수록 감소 하는데 이는 후방에서의 위험거리를 분석하는 과정에서는 회피기동이 없어도 항공기 속도와 미사일 속도가 같은 방향 이므로 접근속도가 느리며 회피기동에 따른 접근속도의 변화도 작기 때문이다. 항공기의 기동성능에 따라 위험 거리는 추가적 으로 감소했으며 기동성 증대에 따라 영향이 크게 나타나는 영역은 60° 부근으로 =5km, =7G 조건에서 위험 거리가 최대 18.9%가 감소하는 것으로 나타났다.
MAW의 성능이 높아 가 증가하는 경우 항공기가 미사 일을 더 조기에 발견할 수 있으므로 회피기동을 할 수 있는 충분한 시간을 갖게 된다. Fig. 7에 나타난 것과 같이 가 큰 경우 미사일의 접근을 원거리에서 탐지하고 회피기동을 수행하는 것을 알 수 있다. 이에 따라 항공기의 y 방향 이동거 리는 증가하였다. 8km 거리, 60°의 방위각에서 미사일을 발사한 경우 값에 따른 30초 이후 미사일과 항공기의 거리는 약 1km로 큰 차이가 나타나는 것을 확인할 수 있었다.
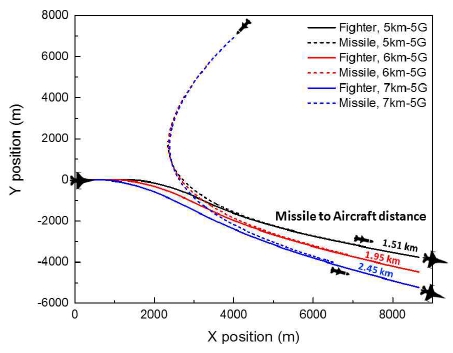
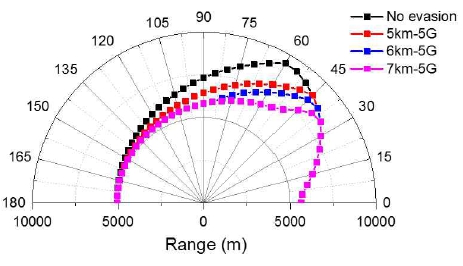
Fig. 8은 의 변화에 따른 위험 거리의 변화를 나타낸 것이다. 전방의 경우 탐지 거리가 5km 수준이므로 가 증가해도 위험 거리에는 큰 변화가 없는 것으로 나타났다. 반면 45°부터 130° 부근에서는 가 증가함에 따라 위험 거리가 큰 폭으로 감소하였다. 90° 부근부터는 위험 거리가 6km 부근에 수렴함에 따라 가 7km로 증가해도 위험 거리가 추가로 감소하지는 않았으며 대신 40°에서 75° 구간에 서는 위험 거리가 큰 폭으로 감소하였다. 전반적인 위험 거리의 감소폭은 항공기의 기동성능보다는 에 더 큰 영향을 받는 것으로 나타났으며 =7km, =5G 조건에서 위험 거리가 최대 29.4%가 감소하였다.
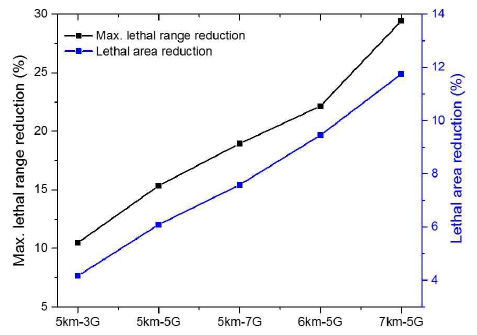
마지막으로 Fig. 9는 회피기동 조건에 따른 위험 거리의 최대 감소량과위험 거리의 방위각 별 적분으로 정의되는위험 면적의 감소량을 나타낸 것이다. 결과적으로 위험 거리와 위험 면적 모두 =7km, =5G 조건에서 가장 크게 감소되는 것으로 나타났으며 위험 거리는 60° 에서 29.4%, 위험 면적은 11.8% 감소하여 의미있는 수준으로 항공기 생존성이 증가 하는 것을 확인하였다. 이에 MAW가 장착되어 적외선 유도 미사일에 대한 회피기동을 수행하는 것만으로도 항공기의 생존성이 증가할 수 있음을 확인하였다. 여기에 적외선 유도 미사일의 접근을 인지하여 플레어 등을 투발할 경우 추가적으로 생존성을 증가시킬 수 있을 것이다. 또한 향후 항공기 개발 시 항공기의 구조적인 한계에 따라마하 0.9의 고속에서 7G 이상의 고기동을 수행하는 것이 어려운 것을 고려하면 MAW의 성능을 끌어올려 미사일을 조기에 탐지하는 것이 항공기의 생존성을 증가시킬 수 있는 더 바람직한 방법이라고 판단된다.
3. 결 론
본 연구에서는 적외선 유도 미사일에 대응하기 위해 MAW가 설치된 항공기가 유도 미사일에 대한 회피기동을 수행할 경우 항공기의 생존성이 어떻게 증가하는지를 분석하고자 하였다. 생존성을 평가하기 위해 탐지 거리가 아닌 위험 거리를 사용하 였으며 위험 거리의 도출에 사용되는 미사일의 유도과정에서 MAW의 탐지거리와 항공기의 기동성능을 고려하여 항공기의 회피기동을 고려하였다. 고도 5km를 마하 0.9로 비행하는 항공기에 대해 방위각 별로 변화하는 탐지 거리를 적용하였 으며 AIM-9 미사일에 대해 시간에 따라 변화하는 미사일 속도를 반영하여 해석을 수행하였다.
해석결과 전방과 후방에서는 미사일과 항공기의 접근속도에 변화가 크지 않아 위험 거리가 동일하게 나타났으나 40°에서 140° 부근까지는 위험 거리가 의미있는 수준으로 감소하는 것을 확인하였으며 회피기동 조건에 따른 항공기와 미사일의 비행궤적을 분석하여 위험 거리의 감소 요인에 대해 분석하였다. MAW의 탐지거리와 항공기 기동성능 중 위험 거리의 변화에 더 영향이 큰 것은 MAW의 탐지거리로 나타났으며 MAW가 미사일을 가장 멀리서 탐지하는 =7km, =5G 조건 에서 위험 거리는 29.4%, 위험 면적은 11.8%가 감소하여 회피기동을 수행할 시 항공기의 생존성이 상당한 수준으로 증가함을 확인하였다. 본 연구를 통해 MAW를 통해 위협을 인지하고 회피기동만을 수행하여도 위험 거리를 감소시킬 수 있음을 확인하였으며 MAW와 연동하여 플레어 등을 사출할 경우 추가로 생존성 증가가 가능할 것으로 판단된다. 본 연구를 통해 도출된 MAW의 효용성과 회피기동에 따른 생존성 증가는 추후 한국형 전투기 개발에 유용하게 사용될 것으로 판단된다.
