

1. Introduction
2. Knitted Soft Gripper
2.1 Experimentation of soft knitted gripper
2.2 Actuation capabilities using EUC
3. Results and Discussion
4. Conclusion
1. Introduction
Soft robotics has emerged as a transformative field in the realm of intelligent machines, providing new opportunities for safer, more adaptable, and compliant interaction with humans and unpredictable environments (Boyraz et al., 2018). Unlike traditional rigid-body systems, which are limited by their stiffness and mechanical constraints, soft robots are designed using flexible, deformable materials that mimic the properties of natural organisms, allowing them to perform delicate tasks with precision and reliability (Zhang et al., 2023). This unique capability renders them particularly suitable for applications in healthcare, wearable devices, human-robot interaction, and the handling of delicate or irregularly shaped objects in manufacturing facilities (Enyan et al., 2025; Lee and Park, 2024; Srivastava et al., 2022). As the demand for more responsive and versatile robotic systems increases, considerable research effort has been devoted to the development of novel actuation technologies that enable soft robots to deform and move in a controlled and programmable manner (Bernat et al., 2023).
Among the various actuation strategies investigated in soft robotics such as pneumatics (Liu et al., 2023), hydraulics (Katzschmann et al., 2016), electroactive polymers, and dielectric elastomers like shape memory alloys (SMAs) (Han and Ahn, 2017) have gained significant attention due to their exceptional actuation characteristics (Guo et al., 2023). SMAs are smart materials capable of undergoing large recoverable deformations when exposed to specific thermal stimuli, making them highly attractive for soft actuation applications (Chopra, 2002). The NiTi (Nickel-Titanium) alloy has been widely studied for its shape memory effect, high energy density, and silent operation. However, integrating SMAs directly into soft robotic structures poses challenges in terms of mechanical compatibility and scalability. Recent advancements have led to the combination of SMA wires with flexible textiles to create SMA-textile actuators, which offer improved adaptability, tunability, and integration within soft robotic systems (Han et al., 2025; Shin et al., 2023). These actuators utilize the shape memory effect to convert electrical energy into thermal energy, inducing contraction and producing motion in a knitted SMA-textile actuator structure, thereby enabling various forms of complex deformation.
One of the most innovative implementations of SMA-textile actuators is their use in knitted architectures, particularly P-loop patterns, which provide high compliance, large strain capability, and multidirectional motion (Chen et al., 2024; Fouda et al., 2012). The looped geometry enhances the mechanical response of the actuator, allowing it to stretch and bend under electrical stimulation. Knitted configurations also simplify fabrication and promote uniform load distribution, making them ideal for wearable and compact robotic systems (Ding et al., 2023). In particular, the P-loop structure allows the integration of actuation and structure in a single unit, reducing complexity and enhancing the versatility of the gripper designs. Despite these benefits, accurately modeling the complex nonlinear behavior of knitted SMA-textile actuators remains a significant challenge, primarily due to the geometric intricacies of the knitted structure and the nonlinearity associated with large deformation mechanics and thermomechanical coupling in SMA materials (Cho and Rhee, 2012; Shang and Wang, 2012).
To address this challenge, numerical modeling methods such as the equivalent unit cell (EUC) approach have gained traction for capturing the essential mechanical behavior of knitted SMA-textile actuators without modeling every geometric detail. The EUC model simplifies the analysis while preserving the key deformation characteristics of the textile actuator. When coupled with finite element analysis (FEA), EUC modeling becomes a powerful tool for simulating the macroscopic mechanical response of soft actuators under various loading conditions. Utilizing ABAQUS, a prevalent finite element analysis software, facilitates the integration of geometric nonlinearity and the simulation of thermally induced actuation, hence offering extensive knowledge into the deformation properties of shape memory alloy-based soft grippers.
In the context of this study, a soft gripper fabricated using SMA-textile actuators arranged in a P-loop configuration is investigated to analyze its actuation performance and deformation characteristics. The gripper is designed to exploit both the stretching and bending motions of the looped textile structure, which are essential for grasping and manipulating objects. An EUC model of the gripper is developed in ABAQUS to simulate the thermally induced shape memory effect and evaluate the resulting deformation. The model integrates geometric nonlinearity to capture the large deformations that occur during actuation, ensuring accurate representation of real-world behavior. The simulation framework allows for the analysis of critical parameters such as deflection angle, strain distribution, and energy efficiency under varying electrical inputs.
This study, for the first time, explores the actuation behavior of a soft knitted gripper fabricated from SMA-textile actuators arranged in a P-loop configuration using a combination of experimental testing and numerical modeling. An equivalent unit cell (EUC) model in ABAQUS is used to simulate deformation behavior under varying electrical loads, incorporating geometric nonlinearity to capture large deflections. The experimental results demonstrate a strong voltage-deflection relationship, with the gripper achieving up to 180° of bending. The EUC model predictions show excellent agreement with experimental data, with only a 5% error in maximum bending angle. These findings validate the feasibility and accuracy of the EUC modeling approach for simulating SMA-textile actuators. Finally, the outcomes of this study offer valuable insights into the design, modeling, and optimization of SMA-based soft actuators, particularly for applications in soft robotics and biomedical systems requiring high flexibility and precision.
2. Knitted Soft Gripper
This section describes the details of the knitted soft actuator and the proposed methodology of this study. It also introduces the experiment study and the EUC methodology used in this study.
2.1 Experimentation of soft knitted gripper
This study’s experimental foundation is based on the research of Shin et al. (2023), who developed and examined a soft knitted gripper utilizing SMA wires integrated within a knitted framework (Shin et al., 2023). The gripper consisted of NiTi shape memory alloy wires (200 µm diameter, encased in polyester) as active fibers and standard cotton/polyester yarns as passive fibers. This structure was constructed using conventional textile knitting methods to create a looping design, facilitating compliant and significant deformation responses under Joule heating.
The researchers examined several critical factors that affect gripper performance. Initially, they enhanced the course-to-wale ratio and the proportion of horizontal to vertical loops via experimental trials. A 1:1 ratio produced the maximum end-tip bending deformation, averaging 157°, attributable to symmetrical structural flexibility in both directions. Secondly, the research investigated the impact of merging several SMA wires within the textile framework. Three configurations were evaluated: one, two, and three bundled shape memory alloy wires. The actuation force increased proportionately with the quantity of wires: from 0.12 N (single wire) to 0.37 N (triple wire bundle), indicating a linear relationship between the number of wires and force output. The impact of electric current input on the actuation of the gripper was examined. Grippers were powered with an escalating current up to 0.16 A. A threshold behavior was noted substantial bending commenced solely above 0.08 A, with the actuator curving abruptly to attain above 100° deflection. Subsequent increases yielded little improvements in deformation, suggesting a convergence threshold for current-induced bending.
Multi-layered structures were constructed to enhance grip control and avoid excessive bending. Layering actuators in double or triple configurations facilitated incremental curvature regulation, allowing the finger to more effectively adapt to the contours of objects. Moreover, the multilayered configuration improved force production and maintained the distorted shape after power stopped, facilitating energy-efficient retention. The SMA-textile actuators were ultimately incorporated into a soft gripper featuring four fingers, each comprised of three actuators aligned sequentially. The gripper exhibited proficient grabbing capabilities for various objects, encompassing flat, convex, and irregular forms, without inflicting damage. Performance validation demonstrated that the gripper was capable of lifting both lightweight, flexible items (e.g., cotton) and rigid objects (e.g., ping-pong balls), hence affirming its appropriateness for practical soft robotic applications.
Fig. 1 illustrates the soft actuator’s deformation behavior before and after activation. During experimentation, one corner of the actuator was fixed, and the bending angle of the opposite corner was measured under incrementally increasing current. The actuator, designed with a course-to-wale ratio of 1:1 and composed of three bundles of SMA wires, was tested by increasing the current in 0.01 A steps from 0 A to 0.16 A and 0 V to 35 volts. The results indicate that minimal deformation occurred below 0.08 A; for example, at 0.06 A, the actuator only achieved an average bending angle of about 4°. However, once the input current reached 0.08 A or higher, significant curling was observed. Beyond 0.14 A, the deformation appeared to plateau, with less than 1.5% variation in bending angle despite further increases in current. This suggests a convergence in the actuator’s deformation response. It was also noted that excessive current could risk overheating the SMA wires, potentially causing permanent loss of the trained shape, while insufficient current might fail to initiate actuation.
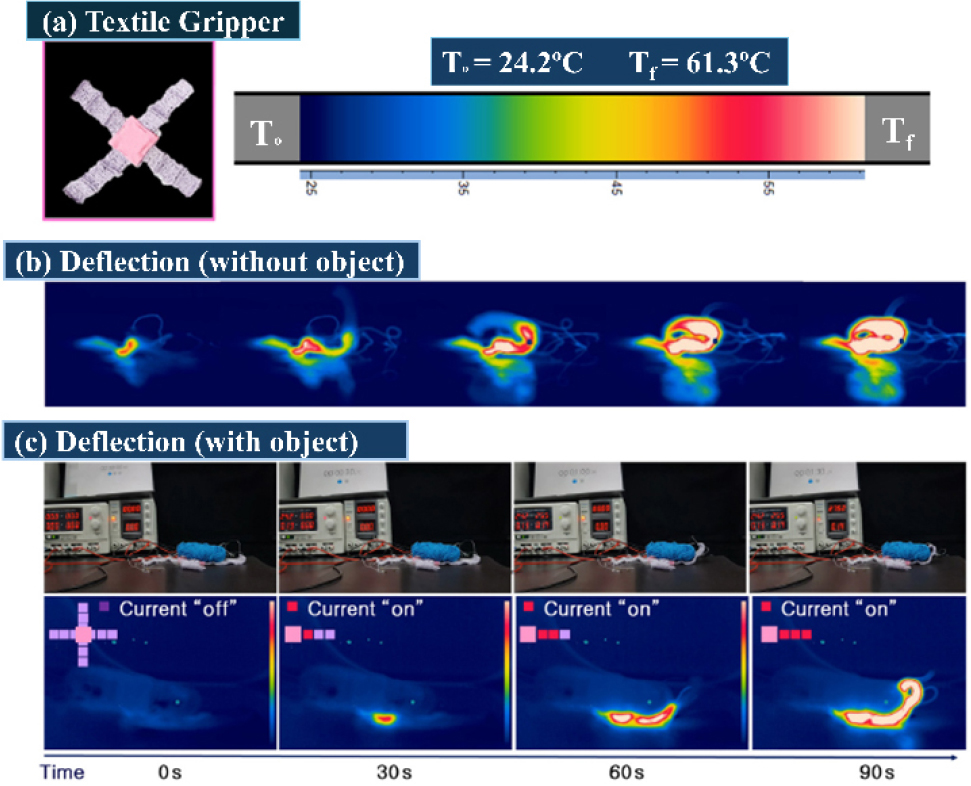
Fig. 1.
The textile gripper, (a) Four-knitted gripper. (b) Actuation of the gripper holding rope. (c) The actuation deflection of one gripper and thermal image (Shin et al., 2023)
Fig. 2 shows the gripping performance of the soft gripper when interacting with cotton piece. In one test, the gripper was positioned near a large cotton piece and actuated by applying current. Upon heating, all four fingers bent inward and securely held the cotton while lifting it, demonstrating effective engagement with soft and bulky materials. The gripper successfully grasped various items without causing visible damage or deformation, indicating its adaptability for handling objects with diverse geometries and mechanical properties.

This experimental investigation acts as a validated standard for assessing the deflection behavior of SMA-based textile grippers. The results are utilized in the present study to contrast the numerical prediction from the EUC model formulated in ABAQUS. The strong correlation between the experimental findings and EUC simulations validates the reliability and precision of the proposed modeling approach.
2.2 Actuation capabilities using EUC
The EUC model was developed with two actuation layers symmetrically stacked using a flexible PET substrate. The actuation layers are assigned to soft material properties and are subjected to the opposite polarity of electric voltages, which induce simple bending. This model predicts the actuation capabilities of the knitted soft actuator, especially for P-loop. The P-loop is used to make the actuator by Shin et al. (2023) in which four knitted P-loop were used to grasp various objects of different sizes and shapes.
The methodology for this study integrates both experimental and numerical approaches grounded in prior research, as outlined Fig. 3. The soft gripper design adopted here was initially developed by Shin et al. (2023), incorporating SMA-textile actuators arranged to enable inward bending suitable for gentle object manipulation. To replicate and predict the mechanical behavior of the gripper, an EUC model was adopted.
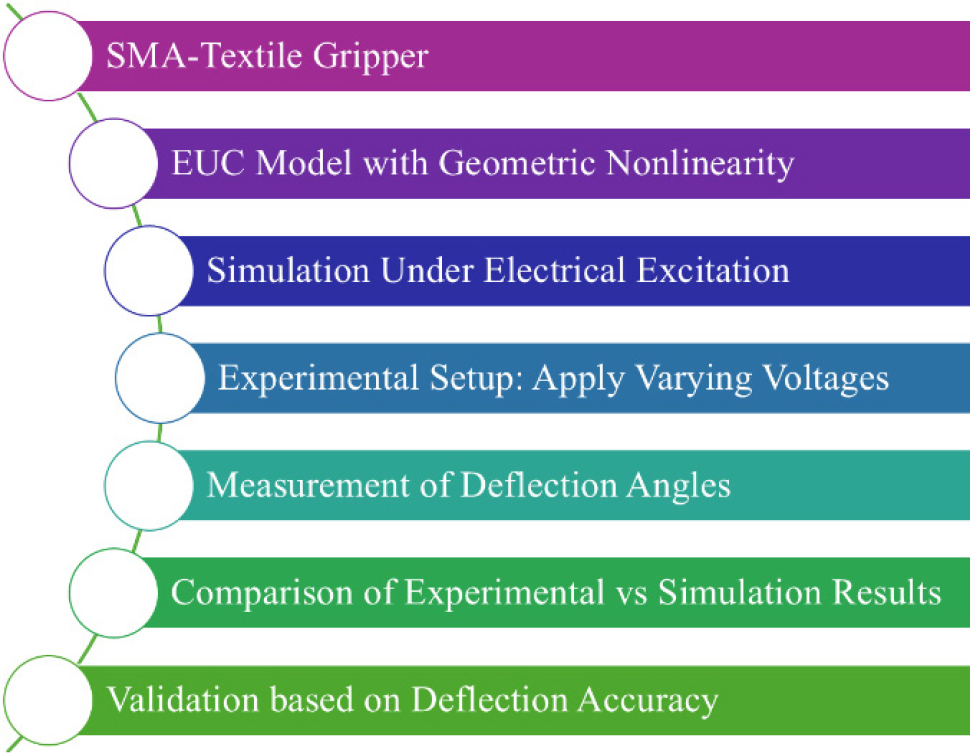
The EUC model was developed using a stepwise, iterative process, allowing replication of the actuation of SMA-based knitted pattern. The model utilizes a linear constitutive equation implemented in ABAQUS via a UMAT subroutine, where the strain response is computed using a compliance matrix and effect of electric field. The model assumes uniform electric field application, with geometric nonlinearity (NLGEOM) enabled to account for large deformations. The EUC structure is modeled as a bimorph configuration comprising two actuation layers bonded to a flexible PET substrate, subjected to opposite polarity voltages to induce bending. Material properties were estimated based on soft materials, and the model was calibrated against the basic pattern actuator to ensure that the predicted deflection closely matched experimental results. To validate the model, an experimental setup was created in which varying voltages were applied to the gripper, and the resulting fingertip deflection angles were recorded. The simulation outputs were then compared against experimental measurements to evaluate model accuracy. Subsequently, using the validated EUC approach, a P-loop-based soft gripper composed of four fingers was designed and simulated in ABAQUS. The model accurately captured the bending behavior induced by SMA activation. Comparative analysis of the simulated and experimental bending angles demonstrated a high level of agreement, confirming the EUC model’s effectiveness in predicting the real-world actuation performance of SMA-textile-based soft grippers.
3. Results and Discussion
Fig. 4 illustrates the actuation sequence of the P-loop-based soft gripper modeled in ABAQUS, highlighting its deformation behavior across multiple actuation phases. Initially, the gripper is shown in its undeformed state, exhibiting a cross-like geometry composed of four flexible fingers. Upon electrical excitation, the embedded shape-based P-loop soft gripper triggering progressive inward bending of the fingers. As shown in the figure, this deformation occurs in distinct phases. The gripper transitions from a flat, open configuration to a partially curled state and eventually into a fully enclosed loop structure. This looped deformation referred to as the P-loop configuration enhances the gripping ability by conforming around objects, enabling both secure grasping and lifting of items with various shapes and sizes. To quantitatively evaluate this bending behavior, the three-point angle method was used within ABAQUS. This approach calculates the curvature-induced deflection angle by identifying three nodes along the inner arc of each gripper finger. The angle formed by these three points reflects the degree of bending and was measured systematically across a range of voltages to simulate SMA activation levels.
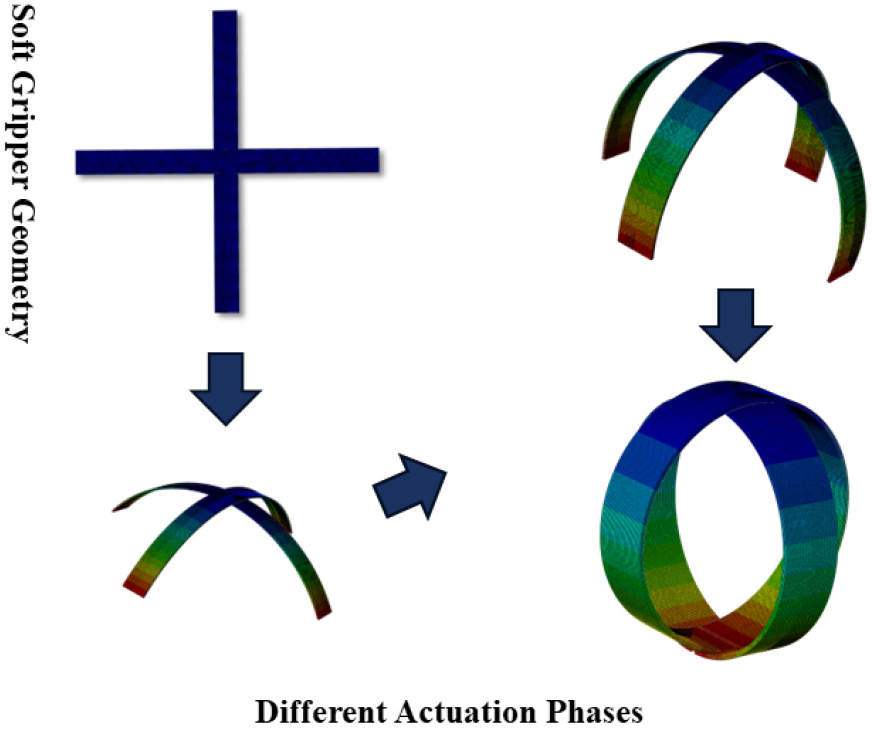
Fig. 5 presents a comparison between the experimentally measured deflection angles and those predicted by the EUC model across a range of applied voltages. The gripper’s bending response shows a nonlinear relationship with the input voltage, which is characteristic of SMA-based actuation. At low voltages (0-14 V), both the experimental and simulation data exhibit minimal deflection, indicating that the SMA wires had not yet reached the activation threshold required to initiate phase transformation. Notably, the experimental curve shows a small initial offset (~25° at 0 V), possibly due to pre-strain or residual bending in the physical setup, which is not accounted for in the simulation.
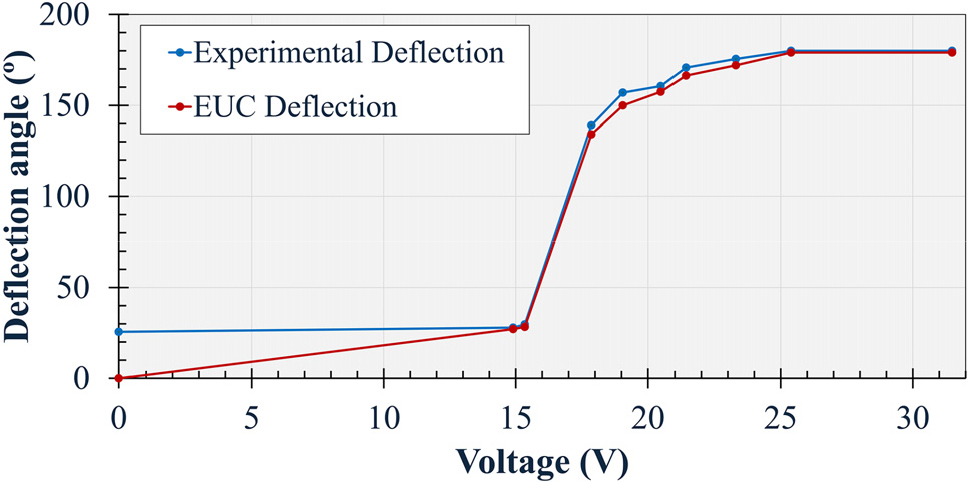
A sharp increase in deflection is observed around 15 V, marking the onset of significant SMA activation. From this point, both experimental and simulated deflection angles rise steeply, with the EUC model closely tracking the experimental trend. The bending angle continues to increase up to approximately 180° as the voltage approaches 24-26 V. Beyond this voltage range, the curve plateaus, indicating that the actuator reaches its maximum deformation capability, and further voltage increases do not produce significant additional bending. This behavior confirms the existence of a deformation saturation point due to the physical limits of the SMA’s phase transformation and the knitted gripper’s geometric constraints.
The EUC model demonstrates high predictive accuracy, maintaining less than 5% deviation from the experimental values in the active range as shown in Table 1. This close correlation validates the effectiveness of the EUC modeling approach in capturing the nonlinear deformation behavior of the SMA-textile actuator. Minor discrepancies at specific voltage points may be attributed to unmodeled factors such as thermal lag, contact friction, or inconsistencies in material behavior under repeated cycling. Finally, the strong agreement between simulated and experimental data confirms that the EUC model is capable of reliably estimating the bending behavior of SMA-textile-based grippers under varying electrical inputs. This validation highlights the model’s potential as a design and optimization tool for future soft robotic applications.
Table 1 presents a side-by-side comparison of the deflection angles measured experimentally and those predicted by the EUC model at various applied voltages. At 0 V, the experimental deflection is recorded at 25.6°, likely due to pre-bent conditions or residual stresses in the physical gripper, whereas the EUC model shows 0°, as it assumes an ideal undeformed initial state.
Table 1.
Comparison of deflection of soft knitted gripper experimental and EUC model-based result
As the voltage increases, both experimental and simulated deflection values begin to rise gradually up to around 15 V, where the SMA wires begin to activate. A sharp increase in deflection occurs between 15.34 V and 19.05 V, reflecting the onset of significant SMA contraction. For example, at 17.86 V, the experimental deflection jumps to 139.1°, while the EUC model predicts 134°, showing strong agreement.
Beyond 20 V, the deflection approaches saturation, with the angles nearing 180°, the practical maximum for the gripper’s bending capability. The EUC model continues to closely match the experimental values in this range, with differences consistently under 5%, validating the model’s accuracy in capturing nonlinear deformation behavior.
Despite the effectiveness of the EUC model in capturing the overall deformation behavior of SMA-textile actuators, several limitations should be acknowledged to provide a realistic understanding of its applicability and accuracy:
1)The EUC model employs a linear constitutive equation, which does not capture the full nonlinear thermomechanical behavior of SMA materials, including phase transformations and hysteresis effects.
2)The simulation assumes uniform electric field distribution, which may not reflect the localized heating and thermal gradients that occur in practical SMA actuation.
3)The model is calibrated using a basic reference pattern and applying the same parameters to more complex or derived patterns may lead to cumulative errors in predicted deformation.
4)Real textile actuators may exhibit variability in loop tension, knitting precision, and SMA wire positioning, which are difficult to model accurately using an idealized unit cell approach.
However, the EUC model developed in this study is primarily suited for soft textile actuators exhibiting bending deformation, particularly those with simple knitted patterns like P-loops and K-loops. It effectively simulates inward bending in soft grippers where deformation is dominated by loop geometry. For broader applicability to complex behaviors such as twisting, folding, or out-of-plane motion the model can be adapted by adjusting loop design, voltage input, and boundary conditions. With proper calibration and mesh refinement, the EUC model can accommodate various SMA-textile configurations, making it a versatile tool for soft robotics applications.
4. Conclusion
This study demonstrates that SMA-textile actuators configured in a P-loop design can achieve large, controllable deformations, with deflection angles reaching up to 180°. The proposed EUC-based modeling approach, implemented in ABAQUS, accurately predicts these deformation behaviors with a deviation of only 5% from experimental results. These findings validate the reliability of the EUC model and highlight its potential for the effective design and simulation of soft robotic systems. This work contributes valuable insights toward the advancement of compliant, high-performance actuators for soft robotics and biomedical applications.
