

1. 서 론
2. 비틀림 불균형 구조물
2.1 1:5 축척을 갖은 RC 구조물
2.2 5층 RC 모멘트 저항 프레임 구조물
3. 병진 변형 및 비틀림 변형의 상호작용 효과
3.1 Case 1: 양방향 편심(2ASY)
3.2 Case 2: 단방향 비대칭 평면(1ASY)
3.3 저항 매커니즘의 영향을 받은 편심의 변화
4. 결 론
1. 서 론
심각한 지진은 예상치 못한 큰 비틀림 거동을 유발하여 구조물에 과도한 변형과 손상을 야기시킬 수 있다. 따라서 현행 건축법에서는 비틀림 거동의 불규칙성에 대한 일부 기준을 충족시킬 수 있도록 설계 비틀림 모멘트를 고려하도록 규정하고 있다. 이를 위해 두 가지 비틀림 설계 접근 방식을 고려할 수 있다. 첫 번째는 등가 정적 해석 방법을 이용하여 정적 이심률()과 우발적 이심률()로 구성된 설계 이심률()과 일부 계수에서 가장 불리한 조합으로 구조물을 설계하는 것이다. 정적 이심률은 질량 중심(CM: Center of Mass)과 강성 중심(CS: Center of Stiffness)사이의 거리이며, 우발적 이심률은 비틀림에 대한 모든 종류의 불확실성을 고려하고 있다. 두 번째 접근방식은 모드 응답 스펙트럼 해석 또는 시간 이력 해석과 같은 동적 해석을 수행하는 것이다. 구조물의 각 층에서 질량 중심은 원점에서 각 방향으로 우발적 이심률과 동일한 거리만큼 이동하는 것으로 가정할 수 있다. 따라서, 각 층에서 4개 질량 중심 위치의 동적 해석을 수행하면 구조물 변형과 부재력을 얻을 수 있고 이 중 가장 불리한 경우를 설계에 고려하는 것이다.
비틀림 설계의 목적은 비틀림 불균형(TU) 건물 요소의 모든 부분에서 요구되는 최대 변형 또는 연성 요구가 어떤 상황에서도 비틀림 균형(TB)을 초과하지 않도록 하는 것이다. 현재의 설계 기준에서 설계 편심은 구조의 선형 탄성 거동을 기반으로 하고 있다. 그러나 비탄성 범위에서 변형 및 손상 제어를 고려할 필요가 있다. 따라서 일부 설계 기준에서는 질량 중심과 강성 중심의 불확실성, 지반 운동의 회전 구성 요소 및 명시적으로 고려되지 않은 기타 불확실성으로 인한 비틀림 효과를 고려하기 위해 우발적 이심률을 도입하여 고려하는 방법을 제공한다. 그러나 우발적 편심은 구조물의 실제 비틀림 파괴 메커니즘을 적절히 설명할 수 없기 때문에 횡하중 저항 구성 요소에 대해 과도한 강도와 강성을 요구할 수 있다(Ha et al., 2019).
Stathopoulos와 Anagnostopoulos(2005)는 이상적인 1층 구조가 아닌 정적 이심률이 다른 실제 다층 비틀림 불균형 프레임 구조의 비탄성 지진 응답을 연구했다. 이 연구에서 유연 격막의 횡방향 변형은 고정된 편심 값에 관계없이 원하는 설계 요구를 초과하여 강한 격막의 변형보다 훨씬 더 크게 나타났다. 이러한 결과 때문에 현재 비틀림 설계 조항의 기본 가정이 아닌 적절한 다층 모델을 사용하여 재평가될 필요가 있다고 하였다. Anagnostopoulos 등(2015)은 우발적인 이심률이 부재의 크기 조정과 계획에서 연성 요구 분포를 보다 균일하게 만드는 데 거의 영향을 미치지 않는다고 지적하였다. 이 설계 요구 사항은 계산 요구 사항을 증가시켜 구조 설계를 더 복잡하게 만들기 때문에 재검토될 필요가 있다.
Lee와 Hwang(2015)은 연성층, 약한층, 지상층의 비틀림의 불확실성이 높은 1:5 축척의 저층 RC 건물 모형의 진동대 실험을 통해 비틀림 거동을 조사했다. 이 연구에서는 내진 설계 기준에 주어진 설계 이심률이 임계 비틀림 거동을 나타낼 수 없다는 사실을 발견했다. 이는 변형 과 기저 전단 시간 이력에서 최대 응답에서의 편심 범위가 설계 기준에 의해 예측된 이심률 범위를 초과했을 뿐 아니라 심각한 지반 가진에서 아주 작은 편심도 가장자리 프레임의 큰 변형으로 변환될 수 있기 때문이라고 하였다.
비틀림 설계에 대한 선행 연구들은 다양한 지반 운동과 통계 및 확률적 해석을 이용하여 이상화된 단층 또는 다층 건축물에 대한 합리적인 설계 이심률을 찾는 데 초점을 맞추고 있다. 그러나 서로 다른 정의를 사용하거나 가정을 하기 때문에 각 연구들의 결과가 다르게 나타났다(Ahn and Lee, 2001; Anagnostopoulos et al., 2015; Chandler et al., 1996; Jung, 2002; Lee and Hwang, 2015; Rutenberg, 1992). 이러한 문제에도 불구하고 실제 구조물을 이용한 동적 전단력과 비틀림 사이의 명시적이고 직접적인 상호작용 연구는 거의 이루어지지 않고 있다.
본 논문에서는 비틀림 불균형 구조의 전단력 및 비틀림 모멘트 거동에서의 저항 메커니즘 특성을 연구하였다. 비틀림 균형 또는 대칭 구조에서 전단력은 병진 변형에 의해 저항되고 비틀림 모멘트는 비틀림 변형에 의해 저항된다. 그러나 비틀림 불균형 또는 비대칭 구조에서 전단력은 병진 변형외에도 비틀림 변형에 의해서도 저항되며, 비틀림 모멘트도 마찬가지이다. 이러한 현상은 탄성 및 비탄성 거동 모두 적용된다. 따라서 전단력과 비틀림 모멘트에 대한 병진 및 비틀림 변형의 상호 작용을 나타내는 방정식을 제안하였다. 제안된 비틀림 모멘트 증분 방정식은 편심 감소, 비틀림 강성 저하 및 비틀림 겉보기 에너지 생성과 같은 비탄성 비틀림 응답 특성을 이해하는데 유용하다. 비틀림의 전체 저항은 비틀림 변형보다 주로 병진 운동에서 비롯될 수 있다는 것을 방정식을 통해 확인할 수 있었다. 이와 같은 결론은 비틀림 모멘트가 비틀림 변형에 의해 저항된다는 일반적인 예상과 대조된다고 할 수 있다.
본 연구를 위해 탄성 및 비탄성 응답은 (1) 단방향 비대칭 평면으로 양방향 편심(2ASY)을 갖는 RC 구조(1:5 축소 모델)의 진동대 실험과 (2) 국내의 서비스 수준 지진(SLE: Service level earthquake) 및 최대 고려 지진(MCE: Maximum considered earthquake)에서 단방향 비대칭 평면(1ASY)을 갖는 5층 RC 모멘트 저항 프레임(MRF: Moment-resisting frame) 구조의 해석 결과로부터 얻었다. 이를 통해 비틀림 불균형 구조의 전단 및 비틀림 거동에 대한 저항 메커니즘을 확인하고자 하였다.
2. 비틀림 불균형 구조물
2.1 1:5 축척을 갖은 RC 구조물
진동대 실험은 인벤토리 데이터를 기반으로 축소 구조물을 결정하고 중력만 고려하여 설계하였다. 보강에 대해서는 내진성이 없으며, 원 구조물은 연성층의 불규칙성과 지층의 비틀림이 있다. 이러한 불규칙성을 줄이기 위해 주변 프레임에 좌굴 억제 브레이스(BRBs: Buckling-restrained braces)와 섬유 강화 폴리머(FRP: Fiber-reinforced polymer) 시트로 구조를 강화하였다(Lee et al., 2011; 2013). 그리고 제작 시간과 비용을 줄이기 위해 2층은 유사성 요구 사항을 만족하도록 설계하였으며, 3층은 같은 체적의 콘크리트 블록으로 대체되었다. 진동대 실험에서는 보강된 구조물의 변위, 가속도, 그리고 힘을 측정하였다. 로드셀(LC)은 Fig. 1(b)와 같이 배치하였으며 변위계(D)와 가속도계(A)의 배치는 Fig. 1(c)과 같다. 관성력은 측정된 가속도 데이터 사이의 선형 가속도 분포를 가정하여 얻었으며, 관성 비틀림 모멘트는 X 및 Y방향의 가속도로부터 도출된 두 개의 관성 비틀림 모멘트를 평균하여 계산하였다. 로드셀로부터 측정된 지반 전단력과 비틀림 모멘트 및 관성력의 시간 이력 형태가 유사하기 때문에 로드셀에서 측정된 힘을 이용하여 전단력과 비틀림 모멘트 사이의 상호작용을 고려할 수 있다(Lee and Hwang, 2015).
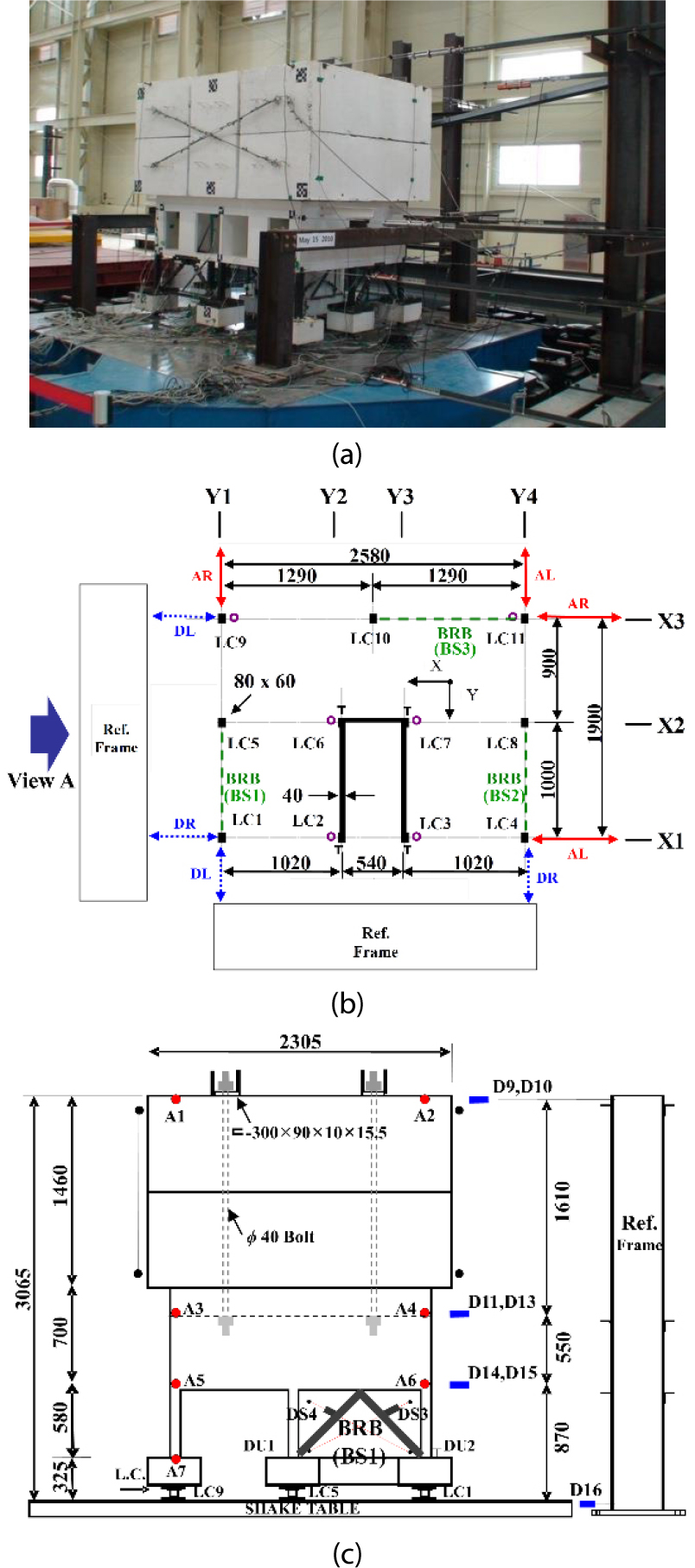
Fig. 1.
RC Building Model with Two-way Eccentricity(1:5 scale, unit: mm, Lee and Hwang, 2015): (a) Overview of shake-table test set-up; (b) Plan at the ground story; and (c) Sensor configuration (D: displacement, A: acceleration)
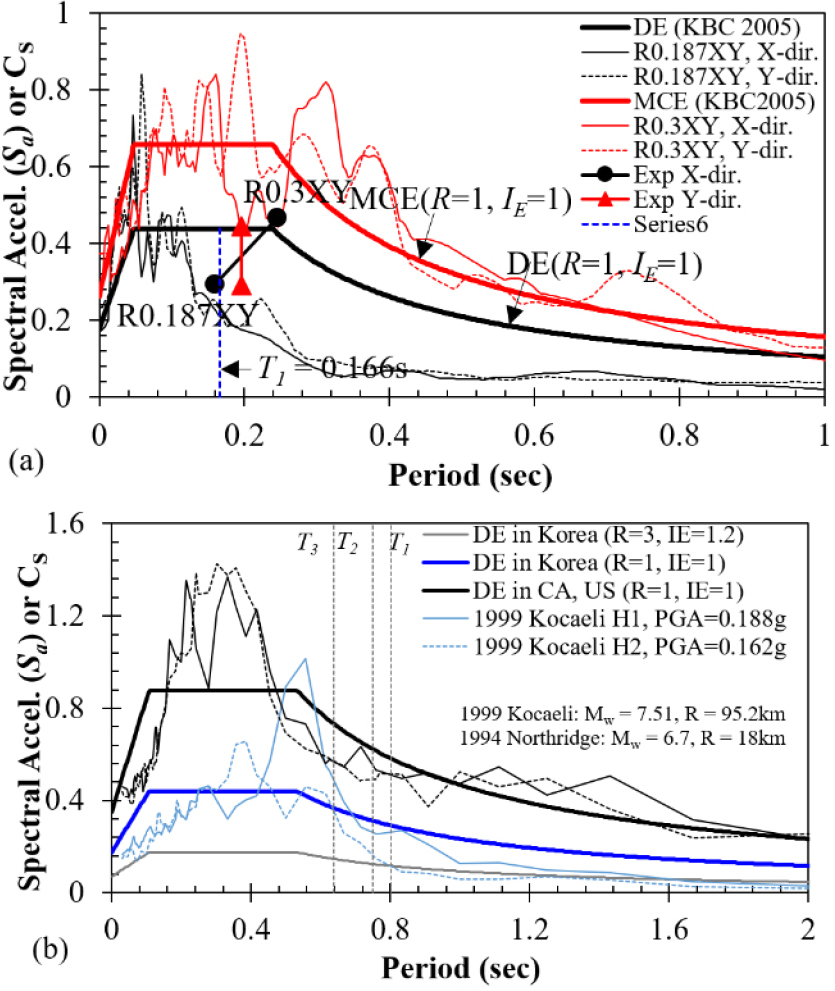
KBC 2005 기준에 정의된 반응수정계수()와 중요도 계수()를 고려하면 설계 지반 전단력()은 다음의 식을 통해 계산할 수 있다(AIK, 2005).
여기서 는 지진계수, 는 구조 모델의 지진 중량이다. 와 은 각각 주기 0.2초와 1초에서의 스펙트럼 가속도이다. 식 (1b)는 식 (1c)에서 일 때의 를 초과할 수 없다. 그리고 는 경험식으로부터 추정된 기본 주기이다. 따라서 1:5 축적 모형 보강재의 등가 지진 하중이 267.4kN이므로 설계기저전단력은 다음과 같다.
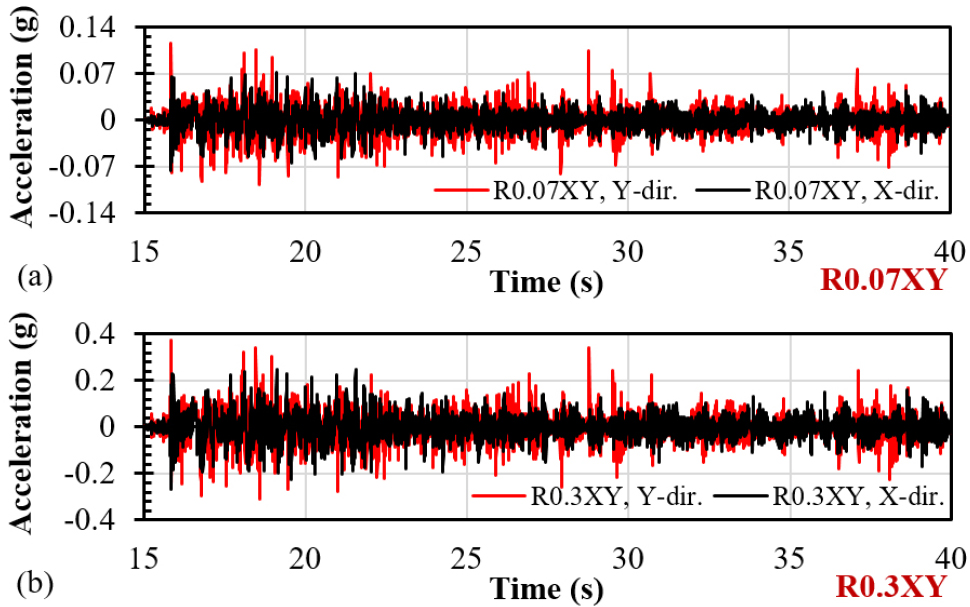
진동대의 입력 가속도 Taft 지진(Arvin-Tahachapi Earthquake, Taft, CA, USA, 1952)의 X방향(Taft N21E)과 Y방향(Taft S69E) 구성요소를 기반으로 의 스케일로 시간 축을 압축하고 KBC 2005 기준의 탄성 설계 스펙트럼과 일치시키도록 Fig. 2와 같이 최대지반가속도(PGA: Peak ground acceleration)을 조정하였다. Fig. 3(a)와 Fig. 3(b)는 각각 서비스 수준 지진(SLE)인 R0.07XY와 최대 고려 지진(MCE)을 나타내는 R0.3XY으로 입력 지진 하중의 시간 이력을 나타낸다.
2.2 5층 RC 모멘트 저항 프레임 구조물
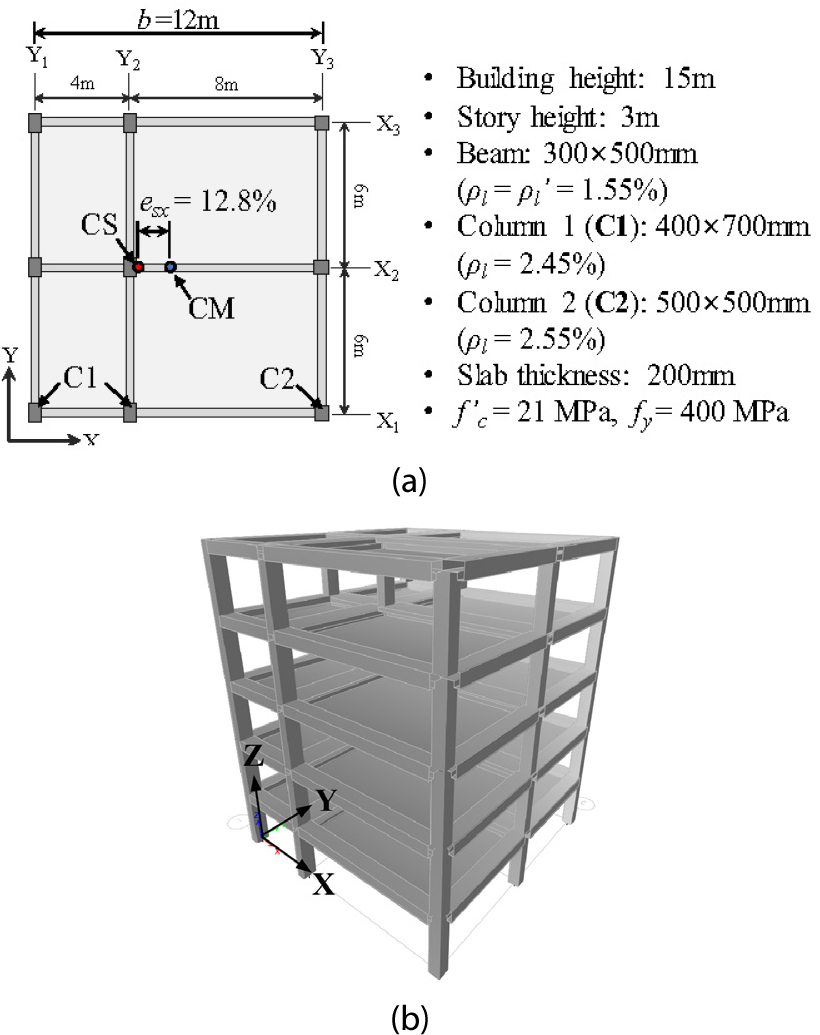
수치 지진 해석은 IBC 2012(IBC, 2012)와 유사한 KBC 2016 (AIK, 2017)의 설계 방법을 통해 단방향 비대칭 5층 RC 모멘트 저항 프레임 구조물을 대상으로 하였으나 비틀림에 관한 규정을 만족하지는 않는다. 구조물의 설계 편심 범위()는 로 평면 폭(b)의 -12.8% ± 5%이다. 구조물의 비선형 시간 이력 분석은 내진 해석 소프트웨어인 ETABS(ETABS, 2013)을 사용하여 수행하였으며 분석 모델의 개요는 Fig. 4에 나타나 있다. 구조 요소 끝단에는 비선형 모멘트 회전 힌지가 있는 탄성 빔 요소와 비탄성 기둥 요소로 모델링하였다. 이 구조물은 휨에 의해 지배되기 때문에 보와 기둥의 비탄성 거동은 무시할 수 있다(ASCE, 2014). 구조물의 감쇠비는 레일리 감쇠를 사용하였으며, 지진 질량은 프로그램에 의해 자동으로 계산된 질량 및 회전 관성 모멘트 값과 각 층의 질량 중심에 의해 일괄적으로 처리되었다.
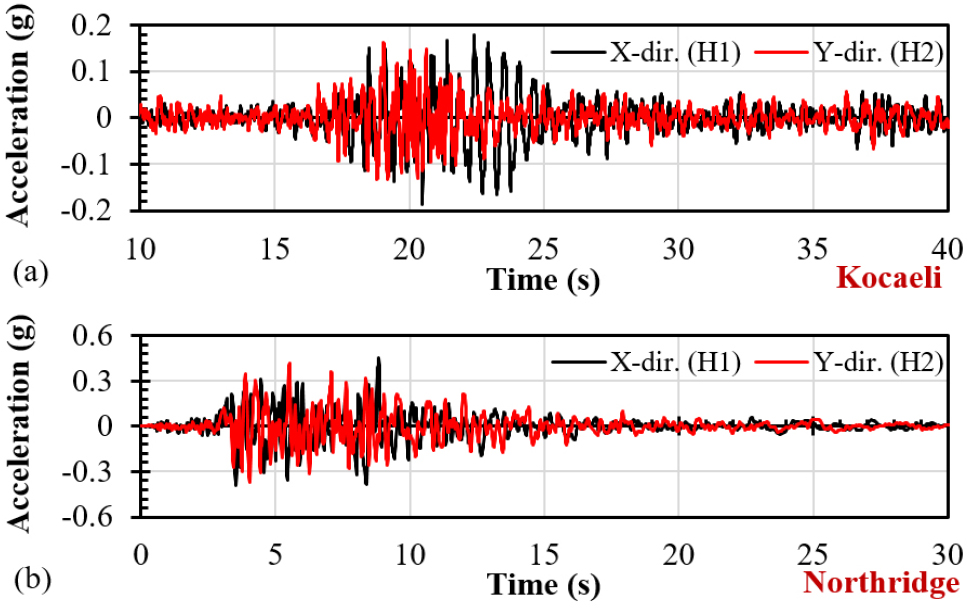
시간 이력 해석은 PEER(NGA Database, 2012)와 CESMD (Center for engineering strong motion data, 2012)로부터 Kocaeli 지진(1999년)과 Northridge 지진(1994년)의 입력 지반 가속도를 Fig. 5와 같이 얻어 사용하였다.
3. 병진 변형 및 비틀림 변형의 상호작용 효과
서론에서 언급한 바와 같이 비틀림 균형 구조에서 전단력과 비틀림 모멘트는 병진 변형과 비틀림 변형에 의해 각각 저항된다. 그러나 비틀림 비균형 구조에서는 전단력과 비틀림 모멘트는 전단과 비틀림 변형 모두에서 저항을 받는다. 모드 전단력()과 비틀림 모멘트()는 병진 변형()의 선형 함수와 비틀림 변형()로 다음과 같이 나타낼 수 있다. 여기서 j는 모드 번호를 나타낸다.
여기서, 및 는 각각 X 및 Y 방향의 층 측면 강성이고, 와 는 각각 X 및 Y 방향의 결합된 부재의 측면 비틀림 강성이다. 그리고 는 비틀림 강성이며, X 및 Y 방향 프레임에 의해 기여되는 및 의 합이다. 식 3(a)에서 와 는 각각 X 방향의 병진 운동()과 비틀림 변형()에 의한 전단력이다. 또한 식 3(b)에서 와 는 Y 방향의 병진 변형()과 에 의한 전단력이다. 식 3(d)에서 와 는 와 에 의한 비틀림 모멘트이다. 마지막으로 식 3(e)에서 와 는 와 에 의한 비틀림 모멘트이다. 이와 같이 탄성 거동하는 구조물의 전단력과 비틀림 모멘트는 선형 조합으로 표현이 가능하다. 그러나 최대 고려 지진에서 비탄성 거동은 일정한 선형 관계가 존재하지 않기 때문에 항복, 하중 제거 및 재하중 단계와 관련하여 식 4(a), (b), (c), (d)와 같이 증분 병진 변형과 비틀림 변형을 고려해야한다.
여기서 은 부터 까지의 증분이다. 그리고 강성은 해당 증분 전단력을 각 프레임의 증분 변형으로 나누어 계산될 수 있다.
3.1 Case 1: 양방향 편심(2ASY)
입력 지진 하중은 서비스 수준 지진(SLE)인 R0.07XY와 최대 고려 지진(MCE)을 나타내는 R0.3XY를 고려하였으며, 각 하중에 대한 1층의 지진 이력 응답은 Fig. 6과 같다. 그림에서 캡션으로 표현된 (1)과 (2)는 프레임 X1에서의 최대 층 변위가 발생할 때를 나타내며, (3)과 (4)는 최대 비틀림 변형을 나타낸다. R0.07XY 하중에서 전단 이력 곡선은 탄성 거동의 형태를 지니지만, R0.3XY에서는 비탄성 응답이 관찰되는 것을 확인할 수 있다. Fig. 6(b)에서 굵은 선은 2.96초~3.5초 사이의 응답을 나타내며, 비탄성 거동으로 인해 큰 에너지 소산을 보인다.
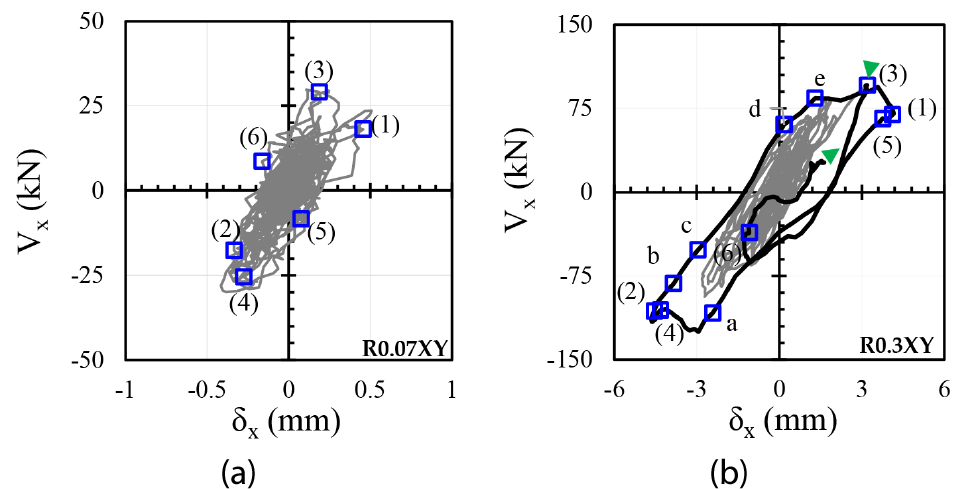
Fig. 7는 (1)~(6)의 각 순간에 층간 변형 및 저항 중심(CR)의 위치 분포를 나타낸다. 최대 비틀림 변형 순간 (5)~(6)에서 편심률은 매우 크지만 (1)~(4)의 순간 보다 항상 낮은 변위를 가짐을 보여준다. 그리고 탄성 거동에서 R0.07XY 하중에 대한 (1)~(4) 순간의 편심률은 Fig. 7(a)의 질량 중심에서 -13%~20% 범위 안에서 발생한다. 그러나 R0.3XT의 비탄성 거동에서는 질량 중심에서 -14%~4.8% 범위 내에서 발생하는 것을 확인할 수 있다.
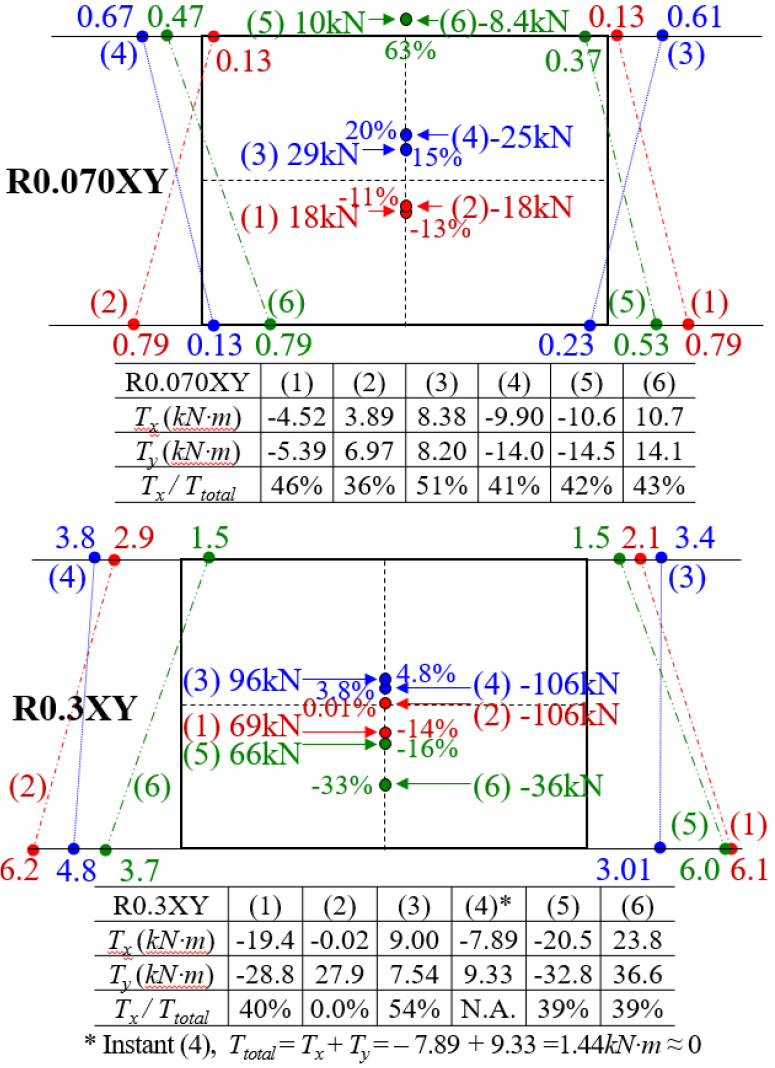
Fig. 7.
Distributions of inter-story drifts and locations of CR(Center of resistance) at instants (1) to (6)(Lee and Hwang, 2015)
모드해석 결과로부터 와 의 비율은 1차와 2차 모드에서 각각 105%:-5%와 90.2%:9.8%로 나타났다. 그리고 와 의 비율은 -6.5%:106.5%와 2.5%:97.5%로 각각 나타났다. 즉, 탄성 거동에서 두 개의 모드가 선형으로 결합될 때 전단력은 주로 에 의해 기여되고, 비틀림 모멘트는 대부분 에 의해 기여된다. 그러나 이와 같은 결과는 비탄성 응답에서는 다르게 나타난다.
Fig. 6(b)에서 비탄성 영역에서는 X방향 프레임의 비탄성 거동으로 가장 큰 에너지 소산이 발생하고, 재하(a → 4 → 2), 하중 제거(b → c), 그리고 재하중(c → d)의 임계 단계를 관찰할 수 있다. 그리고 식 (3)으로부터 이와 같은 단계에 대한 비틀림 모멘트 증분과 전단력 증분들을 계산할 수 있다. 순간 a~(4)까지의 하중 재하 단계에서 는 Fig. 8(a)와 같이 -0.205kN・m이고 -7.69kN・m에서 -7.89kN・m까지 거의 일정하게 유지된다. 그리고 -1.9mm와 1.45 × 10-3rad에 상응하는 와 는 각각 19.3kN・m 및 -19.5kN・m로 큰 값을 가지지만 서로 상쇄된다. 비탄성 영역에서 전단력 증분과 비틀림 모멘트 증분에 대해 관계는 거의 0에 가까운 강성을 유발하는 것으로 나타났다. 그러나 는 에 의해 지배되는 큰 y방향의 비틀림 모멘트 증분( = 24.6kN・m)으로 인해 -15.4kN에서 9.33kN으로 변경된다. 계산된 강성을 식 (3d)에 대입하면 와 의 비율은 각각 -22.8%과 122.8%로 나타났다.
순간 (4) → (2)에서 는 -7.89kN・m에서 -0.023kN・m으로 감소하며, 큰 값을 가지는 에 상응하는 도 상대적으로 크다. 또한 와 의 비율은 두 번째 모드의 비율과 유사하다. 그러나 는 9.33kN・m에서 27.9kN・m으로 빠르게 증가한다. 의 큰 값은 큰 를 유도하며 도 에 의해 증가할 수 있다. 순간 b → c에서는 가 매우 작기 때문에 이와 관련된 항을 무시할 수 있기 때문에 비틀림 변형의 증가 없이 병진 운동에 의한 의 증가 현상은 에너지 발생을 야기한다고 볼 수 있다.
에너지는 재하중 단계(c → d)의 전반에서 발생된다. 는 0.0021rad에서 0.0014rad로 감소하지만 는 14.7kN・m에서 20.2kN・m으로 증가하게 된다. 가 큰 값을 나타내는 것은 가 아닌 에 의한 것이다. 바닥 전단 및 비틀림 모멘트는 주로 하중 제거 및 재하중 단계에서 병진 변형의 영향을 받는다.
R0.3XY 하중에서 가 최대일 때 의 범위는 크게 감소하였다. 이는 항복 후 횡강성이 저하된 상태에서 프레임이 하중 제거와 재하중을 겪으면서 열화 강성의 편심에 가까워지기 때문이다. 이 현상은 관성 비틀림 모멘트에 대한 저항의 병진 운동 지배 메커니즘을 나타내기 때문에 비탄성 응답에서 편심률 감소는 병진 변형에 의한 저항으로 주요 비틀림 저항 메커니즘의 변화라고 할 수 있다.
3.2 Case 2: 단방향 비대칭 평면(1ASY)
두 번째로 다룰 구조의 형태는 국내의 서비스 수준 지진 및 최대 고려 지진을 고려한 단방향 비대칭 평면에 대한 것이다. Kocaeli XY 및 Northridge XY의 하중에 대한 1층 지진 이력 응답을 각각 Fig. 9(a)와 (b)에 나타내었다. 유연면과 강성면의 최대 변형와 1층의 최대 비틀림 변형의 순간에 전단과 비틀림 사이의 지진 상호작용을 조사하기 위한 순간들을 지정할 수 있다. (1)과 (2)는 유연면(프레임 Y3)이 음으로 이동하는 순간, (3)과 (4)는 강성면(프레임 Y1)에서 최대 양 또는 음으로 이동하는 순간, 그리고 (5)와 (6)은 최대 양 및 음의 방향으로 비틀림 변형하는 순간으로 지정하였으며 Fig. 9에서 확인할 수 있다. Fig. 9(a)에서 Kocaeli XY에 대한 응답은 탄성 거동에 가깝다. 그러나 Fig. 9(b)의 Northridge XY에 대해서는 상당한 비선형 거동으로 큰 에너지가 소산되는 것을 볼 수 있다. Kocaeli XY 및 Northridge XY에 대한 층간 이동의 상태, 해당 이심률 및 순간 (1)~(6)에서 1층 최대 응답이 발생할 때 기저 전단력은 Fig. 10에 나타내었다.
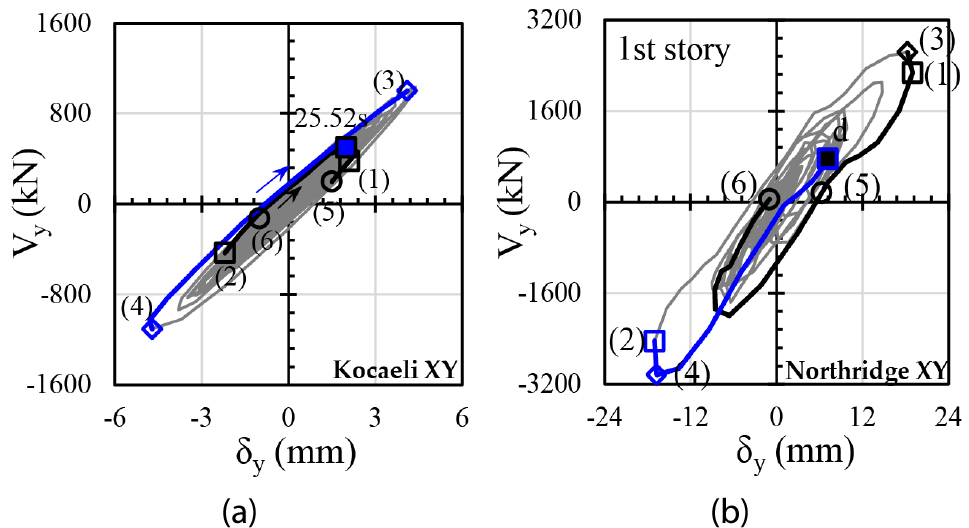
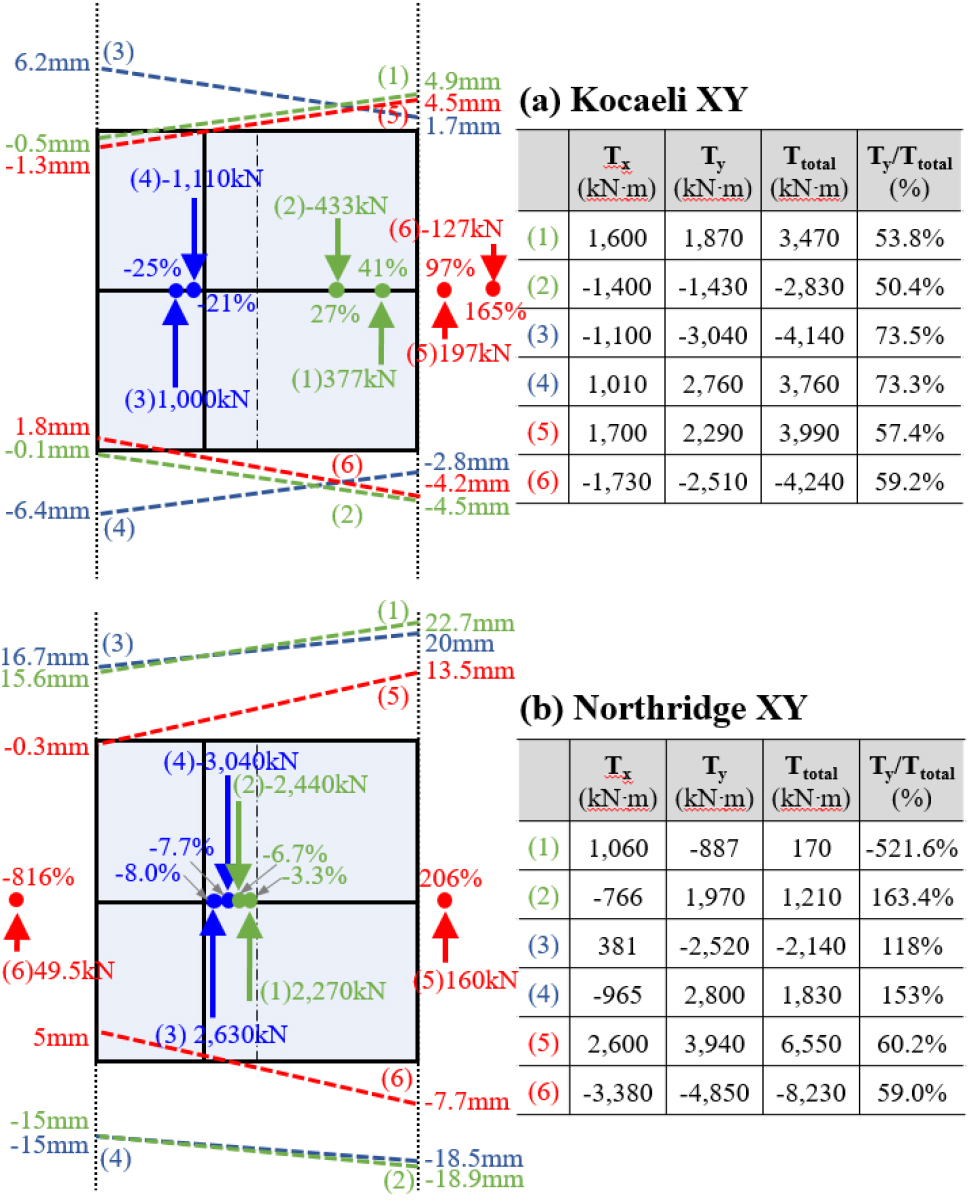
와 의 비율과 와 의 비율을 2차와 3차 모드에서의 확인하면 는 의 지배를 받는 반면 는 의 지배를 받는다. 여기서 두 가지 모드가 선형으로 결합될 때 전단력은 주로 에 의해 기여되고 비틀림 모멘트는 대부분 에 의해 기여된다는 것을 주목할 수 있다. 또한, Kocaeli XY에서의 탄성 응답에 대해 (1)~(6)의 순간에 대한 횡방향 변형 및 비틀림 변형의 기여도는 식 (3b)와 (3d)를 통해 계산할 수 있으며 그 결과는 모달 해석의 결과와 동일하게 나타났다. 그러나 비틀림 모멘트의 대부분은 이러한 탄성 응답과 대조적으로 비탄성 응답에서는 대신 에 의해 저항될 수 있음을 확인하였고 뒤에서 설명될 것이다.
두 개의 주요 구간은 Fig. 11(a)와 (b)에서 전단-비틀림 저항의 특정 우위를 나타낸다. 첫 번째 구간은 25.52초부터 25.68초 (1)로 -123k에 의해 는 증감폭만큼 감소하지만 큰 차이는 없고, 는 2,950kN・m이 된다(Fig. 11(a)). 따라서 은 크게 감소하고 는 78.8kN에서 287kN으로 증가하여 는 거의 일정하지만 는 -1,081kN・m에서 1,870kN・m으로 증가한다. 이 구간에서의 강성 및 값은 Fig. 11(a)의 각 프레임에 대해 를 로 나눈 값으로 계산된다. 및 는 주로 및 에서 비롯된다. Fig. 9(b)에서 및 의 비율은 70%:30% 및 25.9%:74.1%이며, 이는 대략적으로 및 의 모달 비율에 해당한다.
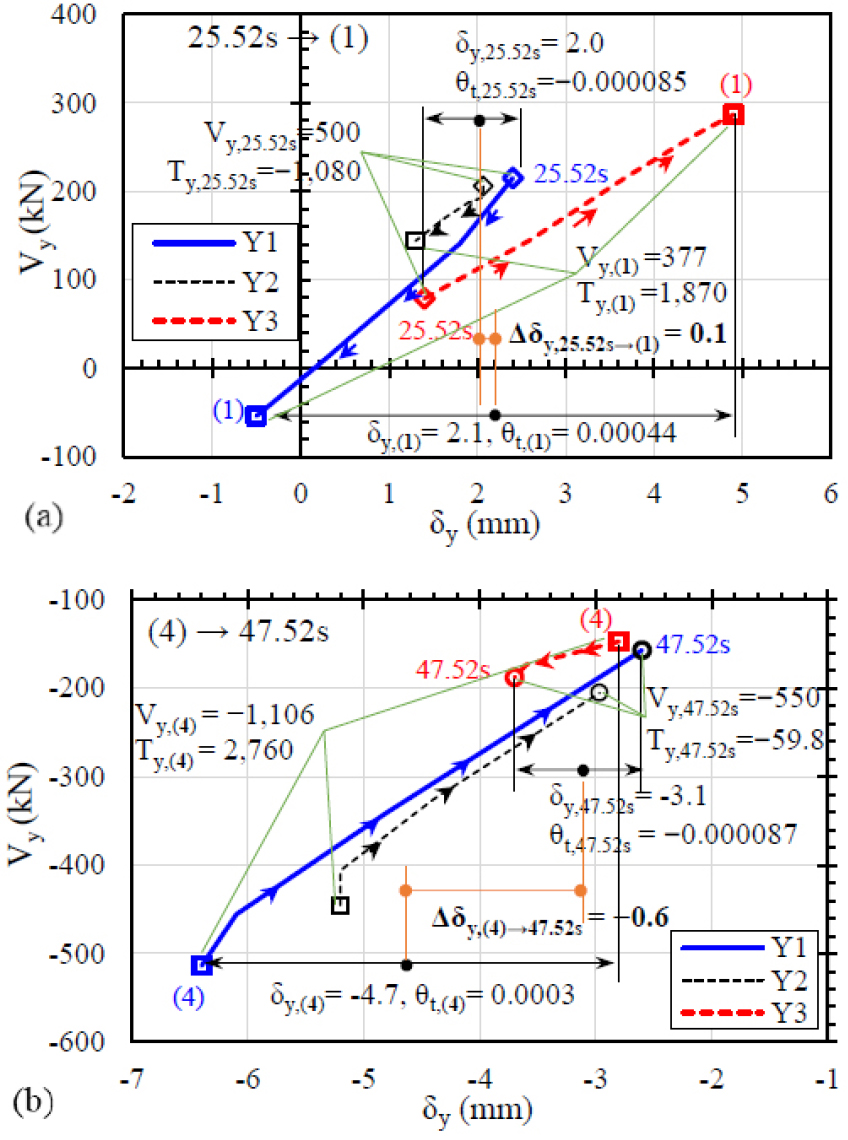
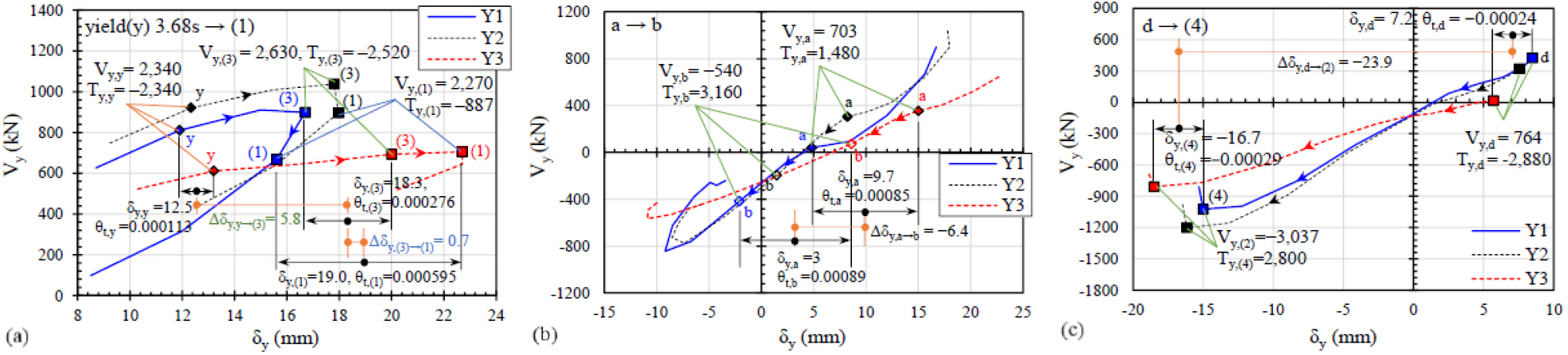
Northridge XY 하중에서는 매우 큰 비탄성 거동을 나타내는 두 가지 임계 지속 시간이 있다. 지속 시간 I은 (3) → (1) → a → b → c → (6)으로 3.76초에서 4.44초까지의 시간이며, 지속 시간 II는 d → (4) → (2)의 흐름으로 8.52초부터 8.92초까지의 시간이다. 지속 시간 I은 Y 방향 프레임을 생성한 직후에 시작하여 하중 제거 및 재하중이 뒤따르고 지속시간 II는 하중 제거에서 재하중까지의 시간을 나타냅니다. 지속시간 I에는 거의 동시에 발생하는 최대 양의 및 , (3) 및 (1)의 시간 순간이 포함되며, 이는 3.76초에서 3.8초까지이다. 순간 (1)은 와 가 반대가 되는 0에 가깝다.
지속시간 I에서 가 일정할 때 는 증가하고 (a → b), 의 증가와 함께 가 감소하면 (b → c) 에너지가 생성된다. (3)에서 (6)까지 비틀림에서 겉보기 에너지 생성의 이유는 다음에서 설명이 가능하다.
지속구간 II에서 의 값은 d(-31.4%)에서 (4)의 -7.98%까지 다양하지만 d와 (4) 시점 사이의 증분 편심 는 -12.4%로 유사하다. 그리고 a에서 b까지의 구간 동안 -11.3%으로 정적 이심률인 -12.8%에 가까운 것을 알 수 있다.
의 값이 -0.00005rad인 경우 는 -2,880kN・m에서 2,800kN・m까지 변화하여 Y 방향 프레임(Fig. 12(b))의 증분 전단력 분포에 의해 5,680kN・m이 된다. 는 이 구간 동안 약 -1,000kN・m의 일정한 값을 갖는다. Fig. 12(c)과 같은 강성을 이용하여 비율을 계산한 결과 지속구간 II에서도 주요 부분이 기저 전단력 및 비틀림 모멘트의 영향은 재하중 단계가 뒤따르는 하중 제거중 비틀림 변형보다는 병진 변형에서 영향을 받는다.
3.3 저항 매커니즘의 영향을 받은 편심의 변화
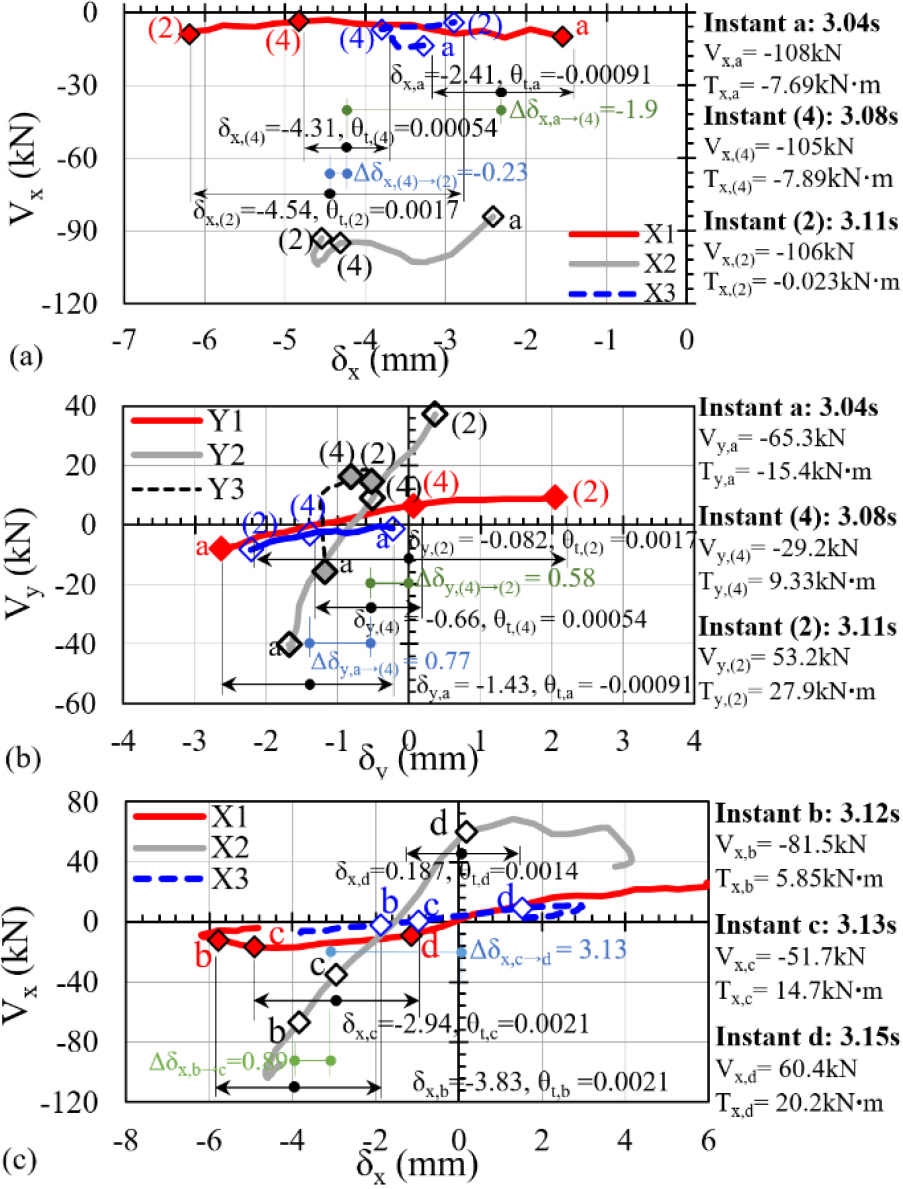
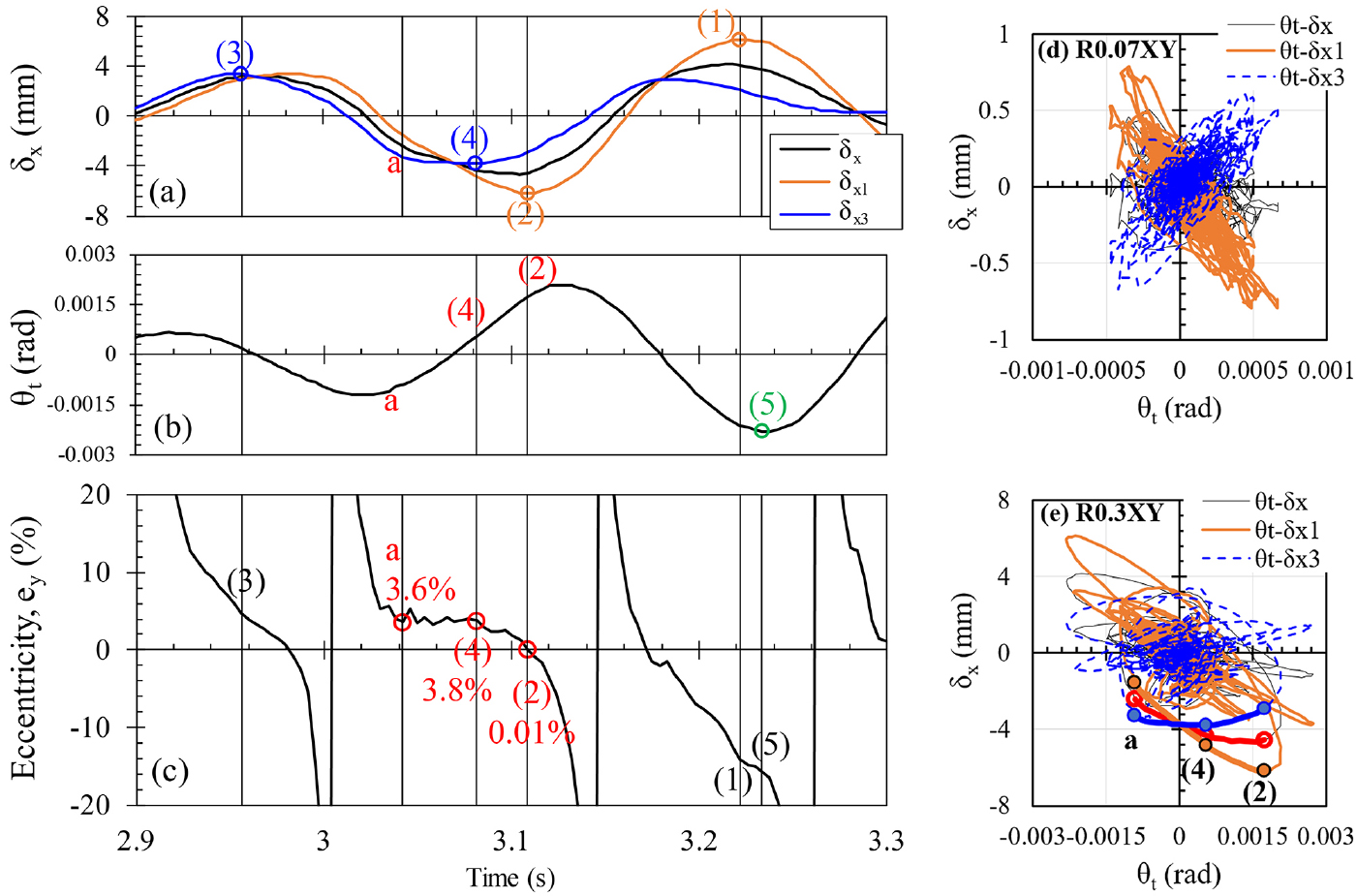
Fig. 6(b)에서 최대 (-3.8mm)의 순간 (4)를 거쳐 최대 (-6.2mm)인 순간 (2)까지 항복 및 최대 (-125kN)에 도달하기 직전의 순간 a부터 짧은 지속 시간(3.04s → 3.08s → 3.11s)은 매우 큰 비탄성 거동을 보여준다. a → (4) → (2)의 구간에는 다음의 특징들이 확인된다.
가 약 -3mm로 유지되는 동안 은 -1.6mm에서 -4.8mm를 거쳐 -6.2mm로 증가하며(Fig. 13(a)) 는 -0.0009rad에서 +0.00054rad를 거쳐 +0.00173rad로 증가한다(Fig. 13(b)). 그러나 는 Fig. 13(c)에서 3.6%에서 3.8%를 거쳐 0.01%로 감소하게 된다. 여기서 의 값은 및 와 관련이 없다. (Fig. 6(b)) 응답의 항복 후 가 증가하는 이유는 응답 스펙트럼(Fig. 2(a))에서 Y 방향의 병진 모드 구간에 해당하는 증폭된 가속 응답의 결과인 에 의해 결정되기 때문이다.
a → (4)의 구간에서 은 가 증가함에 따라 -23.1kN・m에서 1.44kN・m으로 변화하지만 는 특정 범위에서 거의 일정하게 유지되어 와 사이의 관계에서 비틀림 강성이 0이 된다. 그러나 와 사이의 관계는 여전히 강성이 0이 아니며 거의 선형이다.
2.96초에서 3.5초(굵은 선)사이의 지속 시간 동안 비탄성 거동을 통한 가장 큰 에너지 소산은 Fig. 6(b)의 이력 곡선에서 관찰되지만, 에너지 생성은 시점 a부터 시작된다. 에너지는 ① 구간 a → (4) 동안 를 증가시켜, ② 구간 b → c 동안 및 을 증가시켜 생성됩니다. 그리고 ③ 와 사이의 관계로부터 구간 c → d 동안 의 감소와 더불어 를 증가시키고 을 남기는 것을 알 수 있다. 또한 순간 c 이후 와 의 관계에서도 에너지 생성을 확인할 수 있다.
편심, 비틀림 강성 저하, 비틀림 에너지 발생 현상이 줄어드는 이유는 전단 및 비틀림 결합 운동에서 저항 메커니즘을 사용하여 설명할 수 있다.
, 그리고 과 의 응답 이력 결과에서 R0.07XY (Fig. 13(d))에서 양의 최대값을 가지는 시점의 및 은 해당 가 거의 0인 반대 방향의 유사한 피크를 가진다. 그러나 R0.3XY 아래에서는 a에서 (2)까지의 시간 단계 동안 모든 프레임이 항복할 때 Fig. 13(e)에서 큰 와 큰 가 동시에 발생하는 것을 확인할 수 있다.
a에서 (2)의 구간에는 은 -3mm로 거의 일정하게 유지되는 반면 은 앞에서 언급한 의 증가로 인해 가 커지면서 -1.5mm에서 -6.2mm로 급격히 증가하게 된다. 그리고 질량 중심에서 가 X 방향 프레임의 항복 후에 큰 일정한 값을 유지하지만 큰 는 큰 변형을 야기하는 것을 확인할 수 있었다.
4. 결 론
본 연구에서는 비틀림 불균형(TU) 구조의 전단 및 비틀림 거동에서 저항 메커니즘 특성을 조사하여 다음과 같은 결론을 도출하였다.
1) 탄성 전단력과 비틀림 모멘트는 층간 변형과 비틀림 변형에 의한 기여의 선형결합으로 나타낼 수 있다. 그러나 비탄성 거동에서는 힘과 변형 사이에 선형 관계가 존재하지 않으며, 증분 전단력과 증분 비틀림 모멘트는 증분 변형 및 증분 비틀림 변형의 관점에서 해석된다.
2) 5층 모델의 실험결과에서 길이 방향 프레임의 항복 동안 비틀림 모멘트의 증가는 큰 증분 변형에 의한 양의 기여와 비틀림 변형의 큰 증가에 의한 음의 기여를 가진다. 그리고 그 합은 서로를 상쇄시키기 때문에 비틀림 강성이 크게 저하된다. 항복 후 하중 제거 단계에서 비틀림 모멘트의 증가는 주로 비틀림 변형의 매우 작은 증가와 함께 병진 변형의 증가로 인해 발생한다.
3) 해석 결과에서 횡방향 프레임의 항복 후 하중 제거 단계에서 횡방향 프레임이 저항하는 비틀림 모멘트의 96.9%는 횡방향 변형()에 의한 것으로 확인된다. 이 구간에서 는 매우 작기 때문에 를 포함하는 항들은 무시할 수 있다. 그리고 비틀림 변형의 증가 없이 변진 변형에 의해 가 증가하는 현상은 에너지의 발생을 나타낸다.
4) Case 1과 Case 2 모두에서 두 가지 주요 비틀림 모드의 탄성 조합은 주로 병진 변형에 의해 기여하는 전단력과 비틀림 변형에 의해 거의 독립적으로 기여하는 비틀림 모멘트를 나타낸다. 그러나 이 현상은 증분 전단력과 증분 비틀림 모멘트 모두가 증분 비틀림 변형의 거의 무시할 수 있는 양으로 주로 증분 병진 변형에 의해 주로 지배되기 때문에 비탄성 응답에서 크게 변경된다. 본 연구에서 확인된 이러한 결과는 비틀림 모멘트가 비틀림 변형에 의한 것이라는 일반적인 예상과 반대되는 현상이다.
5) Case 1의 경우 비탄성 응답에서 편심()은 구조가 항복하기 시작할 때 항복 프레임의 횡방향 저항 중심을 나타내는 강성 중심에 접근하는 경향이 있다. 항복 후 프레임은 프레임의 저하된 강성에 의해 지배되는 저항 중심으로 하중 제거 및 재하중을 겪는다. 마찬가지로 Case 2의 경우 Y 방향으로의 거의 대부분 프레임이 항복하면 의 값은 강성 중심에 가까우며 프레임의 항복에 따라 강성이 저하되어 하중이 제거된다. 증분 편심률()은 프레임 간의 강성 저하 비율이 유사할 수 있기 때문에 정적 편심률 와 거의 같다. 따라서 항복 후 전체 편심은 강도의 편심과 정적 편심이 포함되는 범위 주변으로 예상할 수 있다.
6) 비탄성 응답에서 편심은 작지만 반드시 상당히 큰 및 로 해석되는 것은 아니다. 이는 Y-방향 전단력은 X-방향과 무관하고 가로(Y) 방향의 자체 스펙트럼 가속도에 따라 커질 수 있고 그에 따라 큰 비틀림 모멘트가 수반되기 때문이다. 즉, X-방향 프레임이 항복 후 관성 비틀림 모멘트에 저항할 수 없더라도(즉, ), 여전히 예비 강도를 유지하는 Y-방향 프레임은 이 큰 관성 비틀림 모멘트에 저항하고 그 반대의 경우도 동일하다. 따라서 전체 구조는 편심의 작은 값에도 불구하고 전체 비틀림 강성이 감소하여 큰 비틀림 변형을 받게 된다.
