

1. 서 론
풍력발전기의 기어박스는 상대적으로 낮은 블레이드의 회전수를 발전기를 구동하기에 충분한 회전수로 증속시키는 역할을 한다. 제한된 공간속에서 높은 증속비를 위해 링기어 (ring gear), 선기어(sun gear) 그리고 유성기어(planetary gear)로 구성된 복잡한 기어시스템으로 구성되어 있다(Cho et al., 2013). 한편, 기어박스는 블레이드를 통해 전달되는 각종 외력에 의해 동적 변형을 일으키게 되고 그 결과 맞물려 회전하는 기어쌍의 기어축들은 상대적으로 뒤틀리게 된다 (Barone et al., 2004). 이러한 기어축 미스얼라인먼트 (misalignment)는 기어 물림률을 저하시킬뿐만 아니라 진동을 유발시키고 기어의 구조적 강도를 저하시키게 된다. 풍력발전기의 대용량 추세에 따른 경량화 설계(Jeong et al., 2012)에 있어 이러한 문제는 더욱 심각하게 대두되고 있으며 이를 위한 대안들이 강구되고 있다.
링기어, 선기어 그리고 유성기어로 구성된 유성기어 셑 (planetary gear set)은 증속에 중추적인 역할을 할뿐더러 기어시스템의 대부분을 차지하고 있기 때문에 축 정렬이 특히 요구된다. 현재 유성기어 셑의 미스얼라인먼트를 해결하기 위한 방안으로 유연축(flexible pin)을 채용한 유성기어축과 유동 선기어(floating sun gear)가 집중적으로 연구되고 있다(Zhu et al., 2012; Nejad et al., 2014). 유연축의 경우에는 기어축 내부에 중공을 형성하여 기어축이 기울어 지더라도 유성기어는 항상 수평을 유지하도록 한 것이다. 반면, 유동 선기어는 기어축을 고정시키지 않고 공간상에 떠있게 하여 맞물려 있는 유성기어들의 기울임에 적응적으로 축정렬이 가능하도록 한 것이다.
한편, 기어박스의 구조해석적인 측면에서 살펴보면, 복잡한 내부 기어시스템을 그대로 반영하는 것은 모델링 작업의 어려움은 물론 엄청난 수의 유한요소를 필요로 한다. 이러한 유한요소 모델링 상의 어려움을 해결하기 위해 기어 치형에 작용하는 접촉력을 기어축이나 축을 지지하는 베어링에 등가 시켜 복잡한 형상의 기어열을 모델링에서 배제시켜 왔다. 하지만, 이러한 단순 기어박스 모델링은 기어열의 연성(flexibility)과 치접촉력을 정확히 반영하지 못할뿐더러 기어열의 분포된 질량에 의한 관성력을 정확히 반영할 수 없는 문제점을 안고 있다(Özgüven and Housner, 1988; 4Cho et al., 2013).
이러한 맥락에서 본 논문은 1단 유성 기어축에 유연핀을 적용한 2.5MW급 풍력발전기용 기어박스의 정교하고 효과 적인 동응답 해석에 관한 것이다. 이를 통해 1단 유성기어 셑 내부의 기어축 미스얼라인먼트의 개선여부와 기어박스 전체의 동응답 특성을 수치해석적으로 고찰하였다. 복잡한 기어시스템 내부의 기어접촉을 정확하고 효과적으로 구현하기 위해 치접촉을 등가 치강성계수를 갖는 스프링요소로 모델링 하였다. 그리고 수치실험을 위해 기어박스 입력축에 토오크를 부과하여 기어축의 상대 기울기와 기어박스 주요 지점에서의 동응답을 분석하였다.
2. 유연핀을 채용한 풍력발전기용 기어박스
2.1 기어박스의 구조
풍력발전기는 블레이드 로터축의 자세에 따라 수평축 (horizontal-axis)과 수직축(vertical-axis)으로 대별된다 (Walker and Jenkins, 1997). 수직축에서는 사보니우스 타입의 블레이드들이 수직방향으로 배열되어 수직축을 중심으로 회전하게 된다. 구조가 비교적 단순하고 제작이 용이한 장점이 있지만 대용량에는 한계가 있다. Fig. 1은 수평축 형식을 보여주고 있으며, 구조적 안정성과 해상으로의 확장성이 높아 최근에는 이 형식이 주류를 이루고 있다.
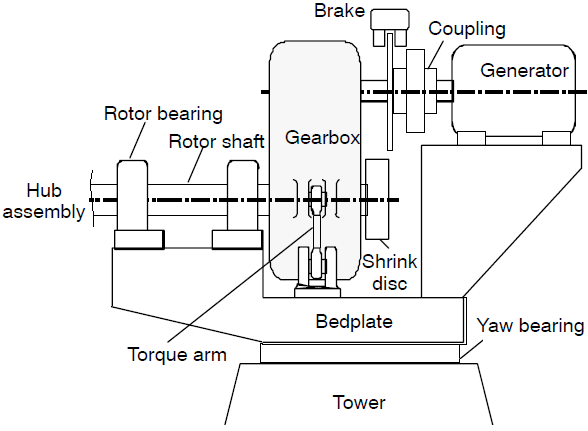
수평축 풍력발전기는 블레이드를 지지하는 로터축, 회전수를 증폭시키기 위한 기어박스 그리고 전기를 생산하기 위한 발전기로 구성되어 있다. 이들 구성요소들은 베드 플레이트 (bedplate)에 설치되며, 나셀(nacelle)이라 불리는 하우징에 의해 보호된다. 나셀로 포장된 이들 상부체는 요베어링(yaw bearing)에 의해 바람방향으로 회전할 수 있도록 되어 있으며, 기어박스 하우징에는 토오크 암(torque arm)이 부착되어 있어 기어박스가 로터축과 더불어 회전하는 것을 저지하게 된다.
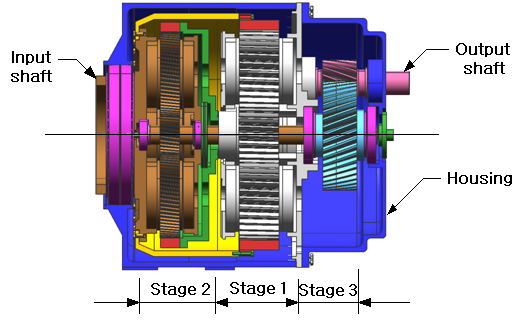
Fig. 2는 본 연구의 대상인 3단으로 구성된 2.5MW급 기어박스의 구성을 보여주고 있다. 하우징으로 둘러싸여 있는 내부 기어시스템은 입력축, 1단과 2단 유성기어 셑, 3단 그리고 출력축으로 구성되어 있다. 좌측의 입력축은 풍력블레이드 축과 연결되어 풍하중 에너지를 토오크 형식으로 1단 유성 기어 셑의 링기어에 전달하게 된다. 링기어에 전달된 토오크는 유성기어와 선기어를 통해 2단 유성기어 셑의 선기어에 전달되며 유성기어를 통해 링기어에 전달된다. 2단 유성기어 셑의 링기어에 전달된 토오크는 링기어축을 통해 3단 기어로 전달되며 원하는 속도비로 증속된 출력축의 회전력은 최종적 으로 발전기에 전달되게 된다. 참고로 2단 선기어 축과 1단 선기어 축은 동일 축상에 놓여있지만 전자는 중공축으로 되어 있어 1단 선기어 축이 그 내부로 통과하도록 되어 있다.
2.2 유연핀(flexible pin)
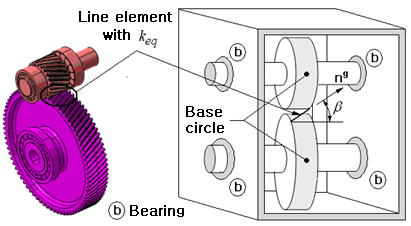
Fig. 3은 5개의 유성기어로 구성되어 있는 1단 유성기어 셑을 나타내고 있으며, 유성기어들을 둘러싸고 링기어가 설치 되어 있고 중심에 하나의 선기어가 설치되어 있다. Fig. 2에 나타나 있는 바와 같이 링기어는 얇은 실린더형 외륜이 입력축 까지 연장되어 있어 입력 토오크가 전달되게 된다. 반면, 중공축으로 되어 있는 선기어 축은 베어링으로 지지되어 있으며 좌단에 디스크 형식의 1단 링기어 전달판과 결합되어 있다. 한편, 유성기어는 좌우 지지판을 가진 브라켓(bracket)에 설치된 고정축에 얇은 베어링을 이용하여 회전 가능하도록 조립되게 된다.
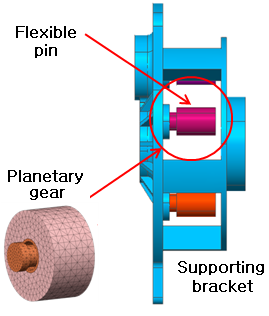
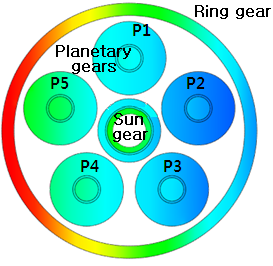
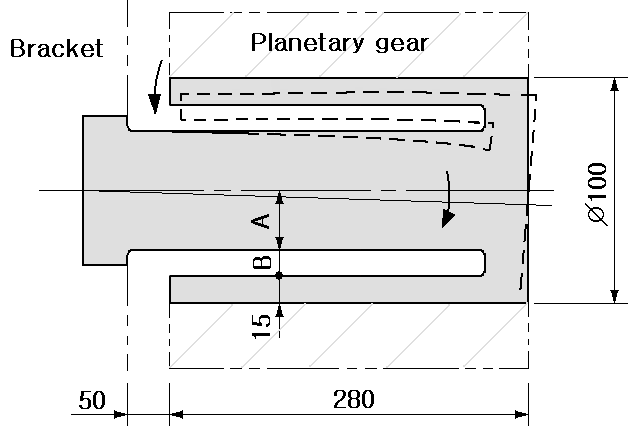
Fig. 4는 본 연구에서 1단 유성기어 셑에 채용한 유연핀의 기하학적 형상과 주요 치수를 나타내고 있다. 점선은 가운데 실축(solid shaft)과 얇은 링부분의 상대적 거동을 예시적 으로 나타내고 있다. 즉, 기어축이 기울어지더라도 얇은 링부분의 반대방향으로의 처짐에 의해 유성기어의 면은 수평을 유지할 수 있다. 주어진 축의 외경과 얇은 링의 두께에 대해서 유연핀의 이러한 상반되는 처짐의 파라메트릭 분석을 위하여 중공 부분의 간격 B의 실축 반경에 A에 대한 상대비를 설계변수로 설정하였다.
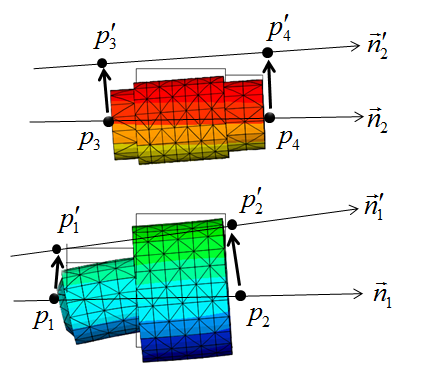
서로 맞물려 회전하는 한 쌍의 기어에 있어 기어축의 미스얼라인먼트는 두 축의 상대적인 기울기로 계산된다. Fig. 5는 두 축 1과 2의 변형 전후의 기하학적 형상을 나타내고 있으며, 변형 후 두 축의 축방향 벡터 n1'과 n2'는 축상의 임의 지점들의 변위벡터 Pi'(i=1,2,3,4)로 정의할 수 있다. 따라서, 변형 후 두 축의 상대적인 기울기 θ는 벡터 n1'과 n2'의 내적을 이용하여 계산할 수 있다.
3. 기어박스의 동응답 해석
기어박스 내부에는 다수의 기어들이 복잡하게 맞물려 있어 치형상을 반영한 치접촉 모델링은 모델링 자체의 번잡함은 물론 엄청난 요소수를 필요로 한다. 이러한 어려움을 해결하기 위해 종래에는 기어를 등가의 관성모멘트를 갖는 집중질량과 링크요소에 의한 회전력 전달방식으로 단순화 하였다(Cho et al., 2013; 2015). 하지만 이러한 종래 방식은 기어 몸체의 분포질량과 연성(flexibility)이 반영되지 못하여 고유거동과 동응답 해석에 어느 정도의 오차를 유발하게 된다.
종래 단순화된 치접촉 모델링의 단점을 보완하기 위하여 본 연구에서는 Fig. 6에 도시한 보완된 치접촉 모델을 적용 하였다. 맞물려 회전하는 두 기어의 치형을 등가의 치강성계수를 갖는 스프링요소로 대체하고 기저선(base line) 이하의 기어 몸체는 그대로 유연체로 모델링하였다. 이렇게 모델링 함으로서 전달력은 물론 기어의 동적효과와 유연성을 제대로 반영할 수 있게 된다.
기어박스와 내부 기어시스템이 차지하는 공간상의 기하학적 영역을 Ω라고 표기하고 그 경계를 ∂Ω라고 정의하기로 한다. 그러면 기어박스 전체의 동변위 u(x;t)는 다음의 지배방정식과 초기조건과 변위 경계조건
그리고 하중 경계조건에 의해 결정된다.
위 식에서 c, ρ 그리고 f는 점성계수, 밀도 그리고 자중을 의미하고, ∂ΩD,∂ΩN과 Γg는 각각 변위경계, 하중경계 그리고 치접촉 경계를 나타낸다. 한편, , keq, b 그리고 β는 각각 외력, 등가 치강성계수, 기어폭 그리고 헬릭스 각(helix angle)을 나타내며 n은 경계에서의 수직 단위벡터를 의미한다.
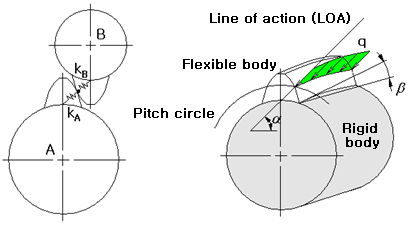
Figure 7
Spring element and finite element model for evaluating the equivalent tooth stiffness (Cho et al., 2015)
Fig. 7은 치접촉을 등가 치강성계수를 갖는 스프링요소로 모델링한 것을 도시하며, 맞물리는 한 쌍의 기어의 등가 치강성계수 keq는 다음과 같이 계산된다.
여기서, lc는 물릴률(contact ratio)을 그리고 kA와 kB는 각 기어의 치강성계수를 나타낸다. 우측 그림은 각 기어의 치강 성계수를 구하기 위한 유한요소 모델을 보여주고 있다. 기어 치는 유연체로 모델링하고 기어 몸체는 강체로 가정하여 구속 하고 접촉선을 따라 작용선(line of action) 방향으로 균일 분포하중을 작용시킨다. 유한요소해석으로 작용선 방향으로의 변위 δLOA를 구해 치강성계수를 다음과 같이 계산한다.
4. 수치해석 및 결과
4.1 수치해석 모델
Fig. 8은 본 연구의 대상인 2.5MW급 기어박스에 대한 유한요소 모델을 보여주고 있다. 기어박스의 자중을 고려 하였으며, 로터축과 연결되는 입력축과 발전기 축과 연결되는 출력축에 각각 임계 토오크 MEX와 반력 Fx, Fy를 부과하고 y방향으로 변위를 구속하였다. 그리고 입력축을 강체부재로 확장하고 그 테두리를 반경방향으로 구속하였으며, 좌우 토오크 암은 Fig. 1을 참고하여 지지하는 측벽과는 무마찰 접촉을 그리고 저면과는 스프링요소로 지지하였다. 모든 기어들의 치접촉은 Fig. 7에 도시한 바와 같이 등가 치강성계수를 갖는 스프링 요소로 연결하였으며, 기어축과 베어링 그리고 링기어와 하우징과 같이 상대적으로 회전이 가능한 접촉부위는 무마찰 슬라이딩 조건을 부과하였다.
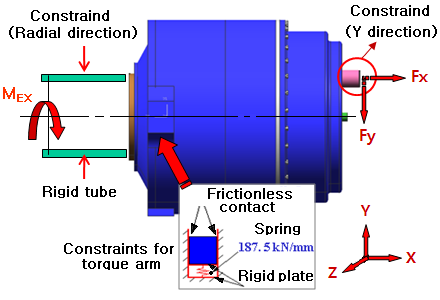
AGMA 설계기준(2003)에는 극한 운전조건에 대한 하중 시나리오들이 규정되어 있으며, 2.5MW급 풍력발전기에 대한 최악의 극한 토오크에 안전율 1.25를 적용하여 입력 토오크 MEX를 4,078kN․m로 설정하였다. 그리고 발전기 축에 의한 반력은 Fx=1.875kN과 Fy=0.5kN을 부과하고 토오크 암의 스프링 상수는 187.5kN/mm로 설정하였다.
내부 기어시스템을 포함한 기어박스는 10절점 2차 테트라요소 (tetra element)로 격자망을 생성하였으며, 총 요소수는 357,286개 이며, 총 절점수는 644,722개 이다. 극한 토오크에 대한 선형 정적해석은 상용 유한요소 프로그램인 midas NFX (2010)로 수행하였다. Table 1은 유한요소해석에 사용된 기어박스 주요 부품에 대한 재료물성치를 나타내고 있다. 재료물성치는 외국 제품의 벤치마킹과 AGMA 설계기준 (2003)을 토대로 선정하였다.
Table 2는 구성기어들의 압력각, 헬릭스 각도, 물림률 그리고 계산된 치강성계수를 나타내고 있다. 참고로 1단, 2단 유성기어 셑에서의 물림률은 선-유성 그리고 유성-링기어의 값을 각각 나타낸다. 구조해석 결과, 변위는 1단 유성기어 지지판에서 4.72mm의 최대값이 발생하였으며 등가응력은 기어박스와 토오크암 연결 코너부에서 165.85MPa이 발생하 였으며, 안전율 1.25를 만족하였다.
Table 1
Material properties of the major parts
| Density(kg/m3) | Young's modulus(GPa) | Poisson's ratio | Yield stress(MPa) | Parts |
|---|---|---|---|---|
| 6,900 | 170 | 0.28 | 240 | Housing |
| 7,800 | 200 | 0.26 | 450 | Brackets(Planetarygear sets) |
| 7,800 | 205 | 0.29 | 460 | Gears, Shafts |
| 7,800 | 205 | 0.29 | 415 | Pins |
Table 2
Specifications and equivalent tooth stiffness of gears
4.2 유연핀 기울기 및 응력
Table 3은 1단 유성기어 축의 선기어 축과의 상대 기울기를 각도로 계산한 결과를 정리한 것이다. 앞의 Fig. 3을 참고하여 일단지지와 양단지지는 축의 내부에 중공이 전혀 없는 솔리드 형태의 축을 의미한다. 일단 그리고 양단지지는 축의 좌우 끝단이 하나만 고정되든지 아니면 모두 고정된 경우이다. 그리고 유연핀의 각 경우는 Fig. 4에 나타낸 가운데 중공부분의 상대크기를 나타낸다.
Table 3
Relative slopes between first-stage planetary shaft and sun gear shaft(unit: degree)
일단지지의 경우에는 모든 유성기어 위치에 대해 상대적으로 큰 상대 기울기를 보이며 5번 위치에서 최대값 0.0497도를 보여주고 있다. 반면, 양단지지의 경우에는 일단지지에 비해 상대적으로 낮은 값을 나타내며 1번 위치에서 0.0038도의 최대값을 보여주고 있다. 한편 유연핀의 경우에는 B/A가 0.3인 경우에 상대적으로 낮은 상대 기울기를 나타내며 1번 위치에서 최대값 0.0041도를 보여주고 있다. 양단지지의 경우와 비교하면 거의 유사한 크기의 상대 기울기를 나타냄을 확인할 수 있다. 이러한 경향은 Table 4의 링기어와의 상대 기울기 값에서도 확인할 수 있는데, 이 결과로부터 설계변수 B/A를 보다 적절히 선정함으로서 상대 기울기를 최소화할 수 있는 가능성을 확인할 수 있다.
Table 4
Relative slopes between first-stage planetary shaft and ring gear shaft(unit: degree)
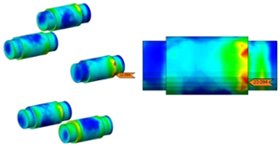
다음의 Table 5는 유성기어 축에 발생하는 최대 등가응력을 비교하고 있으며, 최대값을 나타내는 유성기어 위치에서의 응력분포는 Fig. 9에 나타내었다. 양단지지의 경우가 가장 낮은 등가응력을 나타내며, 유연핀은 일단 그고 양단지지 모두에 비해 현저히 높은 값을 보여주고 있다. 하지만 Table 1에 나타낸 유성핀의 항복응력 415MPa 보다 현저히 낮으며 안전율 3.01~3.21로서 허용 안전율 1.2를 만족함을 확인할 수 있다.
Table 5
Maximum effective stress of first-stage planetary gear shaft
| Supporting method | One-end fixed | Both-end fixed | Relative gap(B/A) of flexible pin | |||
|---|---|---|---|---|---|---|
| 0.2 | 0.3 | 0.4 | 0.5 | |||
| Max. stress (MPa) | 71.6 | 25.7 | 129.2 | 129.9 | 137.7 | 129.6 |
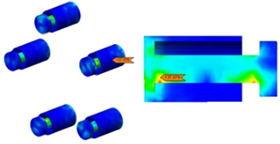
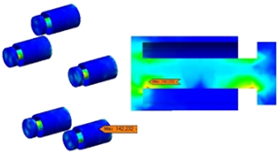
Fig. 9에 나타낸 바와 같이 일단지지와 양단지지의 경우에는 최대 등가응력이 축의 지지단에서 발생하는 반면, 유연핀에서 B/A가 0.3인 경우를 제외하고 모두 중공부의 코너에서 발생함을 확인할 수 있다. 이것은 전형적인 코너부 응력집중 (stress concentration) 현상(Cho and Lee, 2014)에 기인한 것으로서, 코너부의 반경을 키움으로서 어느 정도 감소시킬 수 있다. 중공부의 상대크기 B/A가 0.3인 경우에서는 일단 그리고 양단지지의 경우와 마찬가지로 가운데 얇은 실축의 지지단 부위에서 최대 등가응력이 발생하였다. 유연핀의 경우에는 가운데 중공부를 형성해야 하기 때문에 이러한 응력증가는 필연적이다. 하지만 허용응력보다 현저히 낮고 안전율이 3이상이기 때문에 구조강도적 측면에서는 문제시 되지는 않는다.

4.3 동응답 결과
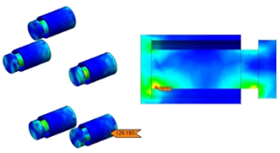
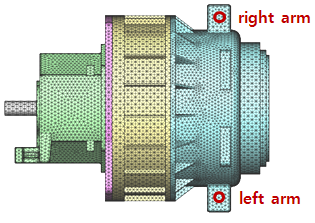
동응답 해석을 위해 Fig. 8의 입력단 토오크 MEX를 임펄스 토오크(impulse torque)로 대체하였으며, 강체부재에 우력 100N을 0.1초 동안 부과하였다. 시간간격(time step)은 1차 고유주파수를 기준으로 0.0138초로 하였으며 감쇠는 일반 구조물에 적용되는 감쇠비 2%를 적용하였다. Fig. 10은 기어박스의 회전자유도를 구속하기 위한 좌우 토오크 암의 위치를 나타내며, Fig. 11과 12는 토오크 암의 시간과 주파수 응답을 각각 보여주고 있다.
미미한 차이이지만 우측 토오크 암이 다소 높은 동변위 시간응답을 나타내고 있으며, 주파수 응답은 특정 주파수 대역을 제외하고 거의 동일한 응답을 나타냄을 확인할 수 있다. 주파수 대역 10Hz이하 그리고 25~30Hz대역에서 좌측 토오크 암이 낮은 동변위를 나타내고 있다. 따라서, 좌우 토오크 암은 큰 차이는 아니지만 서로 다른 시간 그리고 주파수 응답을 보임을 확인할 수 있다. 이것은 입력단에서 바라보았을 때 토오크가 특정방향, 즉 시계방향으로 입력되기 때문이다. 그리고 피크가 나타나는 주파수 2.82, 10.74, 17.53, 35.14과 38.34Hz는 기어박스의 고유주파수임을 확인하였다.
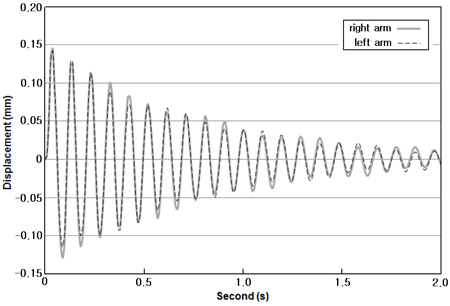
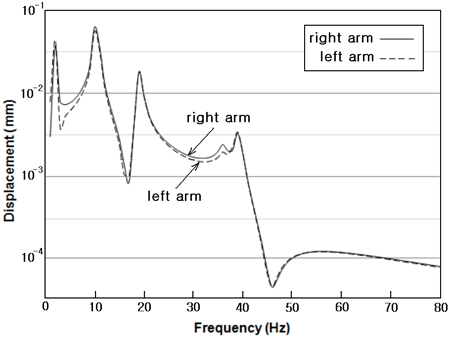
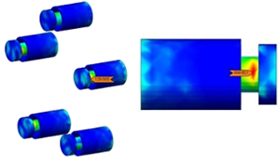
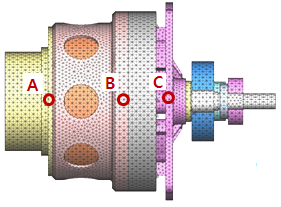
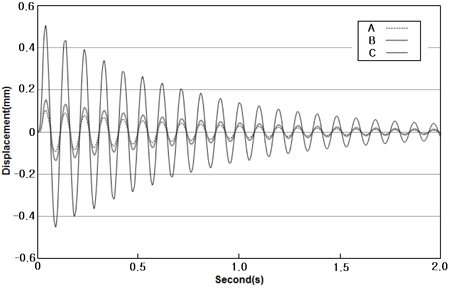
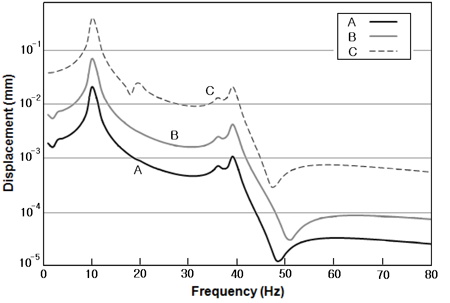
Fig. 13은 내부 기어시스템 내 관측점 세 곳을 보여주고 있으며 1, 2단 유성 캐리어와 1단 링기어 컨넥터에서의 동응답 특성을 고찰하였다. 세 지점에서의 변위 시간응답을 나타내는 Fig. 14로 부터 입력 토오크가 최초로 전달되는 1단 유성기어 시스템의 프레임에 해당하는 1단 유성 캐리어(지점 C)가 가장 높은 동변위를 나타냄을 확인할 수 있다. 한편, 입력단 토오크를 1단 유성기어 셑으로 전달하는 1단 링기어 컨넥트 그리고 출력단으로 증속된 회전비를 전달하는 2단 유성기어 셑의 지지판(지점 A)으로 갈수록 동변위가 현저하게 줄어듦을 볼 수 있다. 이러한 결과는 변위와 반력으로 구속 되어 있는 출력단으로 갈수록 동변위가 감소해야 하는 사실과 잘 일치하고 있다. 한편, Fig. 15는 세 지점에서의 주파수 응답을 보여주고 있으며, Fig. 12에 나타낸 기어박스 전체에 해당하는 좌우 토오크 암의 공진응답과 달리 10.74, 35.14 그리고 38.34Hz에서만 피크가 나타남을 확인할 수 있다. 이것은 이 세 주파수가 내부 기어시스템의 고유주파수에 해당 되기 때문이다.
5. 결 론
본 논문에서는 유연핀을 채용한 2.5MW급 풍력발전기용 기어박스의 기어축 미스얼라인먼트 개선여부와 주요 지점에서의 임펄스 토오크에 대한 시간 그리고 주파수 응답을 고찰하였다. 복잡한 내부 기어시스템의 치접촉은 치형의 등가 치강성계수를 도입하여 모델링하였다.
극한 토오크 그리고 임펄스 토오크 입력에 대한 유한요소 해석 결과, 다음의 주요 결과를 확인할 수 있었다. 첫째, 유연핀을 적용한 유성 기어축은 일단지지에 비해 기어축 미스얼라인먼트가 현저히 개선되었을 뿐만 아니라 유성기어 위치에 대해 거의 균일한 축 기울기를 나타내었다. 둘째로, 유연핀 중공부분의 상대크기 B/A는 미스얼라인먼트에 큰 영향을 미치며, B/A가 0.3일 때 기어축의 상대기울기가 가장 낮았다. 셋째로, 유연핀의 경우에는 내부 중공부의 코너에서 큰 응력집중이 발생하지만, 재질의 허용응력보다는 현저히 낮은 값으로 판명되었다. 넷째, 좌우 토오크 암은 임펄스 토오크에 대해 미미한 차이지만 서로 다른 동응답 특성을 나타내었다. 마지막으로, 기어박스의 동변위는 출력단으로 갈수록 그 진폭이 일률적으로 감소하였 으며, 고유주파수에서 뚜렷한 공진응답을 나타내었다.
