

1. 서 론
2. 쿨롱마찰감쇠를 갖는 단자유도계
2.1 자유진동응답의 일반해
2.2 운동정지조건을 고려한 닫힌 해
3. 점성감쇠와 쿨롱마찰감쇠를 갖는 단자유도계
3.1 자유진동응답의 일반해
3.2 운동정지조건을 고려한 닫힌 해
4. 결 론
1. 서 론
일반적인 구조물의 운동방정식에서 감쇠 항으로써 해가 닫힌 형태로 표현되어 응답을 예측할 수 있는 점성감쇠를 우선적으로 고려할 수 있으며, 점성감쇠에 의한 진동의 크기는 시간이 경과함에 따라 줄어들지만 결코 멈추지 않고 0으로 수렴해가면서 대수적으로 감소하는 특성이 있다. 한편, 쿨롱마찰에 의한 감쇠는 영원히 진동하는 점성감쇠와는 달리 일정한 시간이 경과하여 강성요소에 의한 복원력의 크기가 쿨롱마찰에 의한 마찰력의 크기보다 작아지는 경우에 진동이 멈추게 된다(Rao, 1995; Chopra, 2007). 따라서, 부재와의 접합부 및 마감재와 같은 비구조재의 실제적인 거동은 마찰감쇠에 의한 영향이 더욱 현저하게 나타나기 때문에(Tamura, 2006), 이러한 요소들을 포함하는 실제 구조물의 자유진동응답을 정확히 예측하기 위한 가장 이상적인 운동방정식은 점성감쇠뿐만 아니라 쿨롱마찰에 의한 감쇠도 포함하는 것이 필수적이다.
쿨롱마찰감쇠를 포함하는 동적시스템에 대한 해를 구하는 방법으로는 수치적분에 의해서 반주기마다 부호가 반전되는 쿨롱마찰에 의한 마찰력을 외력으로 구성한 비선형 미분방정식을 직접 계산하는 방법을 이용하거나(Lee, 2018), 또는 쿨롱마찰감쇠에 의해서 1사이클 동안에 소산되는 에너지의 양이 점성감쇠에 의해서 소산되는 에너지의 양과 동일하다는 조건을 이용하여 치환된 등가점성감쇠로 표현된 근사 해를 도출하는 간접적인 방법(Park and Kang, 2006; Seong and Min, 2011)이 있다. 그러나 이러한 방법들은 실용적인 관점에서 허용오차 범위 내에서 만족할 만한 결과를 도출하고 있지만, 이론적인 관점에서 엄밀한 해를 제공하지는 않는다.
이러한 기존의 방법들 중에서 전자의 방법은 각각의 시간간격에 대해서 수치적분을 사용하기 때문에 전체 시간이력에 대한 응답을 구하기 위해서는 다소 시간이 필요하고, 후자의 방법은 선형 2차 미분방정식을 계산하는 문제이기 때문에 시간이 걸리지는 않지만 근사 해를 제공한다는 단점이 있다. 이를 극복하기 위해서 본 연구는 쿨롱마찰이 포함된 단자유도계 자유진동응답을 다루고 있으며, 주어진 초기조건에 대해서 운동이 정지하게 되는 시점과 응답의 크기를 정확히 예측할 수 있는 이론적인 닫힌 해를 제안하는 것을 목적으로 한다. 쿨롱마찰에 의한 자유진동응답의 닫힌 해를 이론적으로 유도하기 위해서는 운동방향의 변화에 따른 마찰력의 부호변화와 이에 따른 가속도응답에서 관찰되는 불연속적인 특성, 그리고 강성에 의한 복원력의 크기보다 마찰력의 크기가 커지는 순간에 단자유도계의 운동이 정지하는 조건 등을 고려해야 한다. 본 연구에서는 마찰력의 부호가 반전되는 반주기 구간별로 운동방정식을 유도하고, 멱급수 함수를 사용하여 이를 전 구간으로 확장시켜 이론적인 닫힌 해를 제공한다. 또한, 주지한 바와 같은 운동 정지조건을 만족시키는 해를 이론적으로 유도하였다. 이러한 본 연구의 제안방법과 수치적분에 의한 해석결과를 비교하여 오차를 평가하였다.
이와 같은 내용들은 기존의 연구(Lee et al., 2019)에도 일부 소개되어 있지만, 여기에서는 유도과정과 정지조건에 대해서 더욱 상세히 고찰하였다. 본 연구의 감쇠 항으로써, 2장에서는 쿨롱마찰감쇠만을 고려하고 3장에서는 점성감쇠와 쿨롱마찰감쇠를 동시에 고려하였다.
2. 쿨롱마찰감쇠를 갖는 단자유도계
다수의 구조동역학 관련 문헌에서 쿨롱마찰감쇠를 포함하는 단자유도계의 자유진동응답에 대한 일반해는 마찰력의 크기가 반전되는 반주기 구간별로 소개되고 있다(Rao, 1995; Chopra, 2007). 이 장에서는 감쇠 항으로 쿨롱마찰감쇠만을 포함하는 단자유도계를 대상으로 하여 이러한 반주기 구간별로 나뉜 일반해를 전체 시간이력에 대해서 확장시킨 일반해를 소개하고, 쿨롱마찰에 의한 운동정지조건을 고려한 닫힌 해를 소개하고자 한다.
2.1 자유진동응답의 일반해
2.1.1 반주기 구간별 일반해
Fig. 1은 질량, 강성 그리고 쿨롱마찰감쇠로 구성된 단자유도계를 나타내며, 외력의 영향을 고려하지 않을 경우 운동방정식은 다음과 같다.
| $$m\ddot x(t)+kx(t)+F_c\cdot\mathrm{sgn}\left\{\dot x(t)\right\}=0$$ | (1a) |
| $$F_c=\mu mg$$ | (1b) |
여기서, 는 단자유도계의 변위를 나타내고, 과 는 각각 구조물의 질량과 강성을 나타낸다. 는 마찰력의 크기로 구조물의 자중에 대한 쿨롱마찰에 의한 저항으로 표현되어, [・]는 마찰계수이고, 는 중력가속도를 나타낸다. 또한, sgn은 부호함수를 나타내는 것으로 구조물의 운동방향 즉, 속도의 방향에 따라서 마찰력의 부호가 변화한다.

식 (1)과 같은 자유진동응답의 일반해는 구조물의 운동방향에 따라서 반주기마다 마찰력의 부호가 변화하여 다음과 같이 표현된다.
| $$x_N(t)=A_Ncos\omega_nt+B_Nsin\omega_nt-x_c,\;\lbrack{\dot x}_N(t)>0\rbrack$$ | (2a) |
| $$x_N(t)=A_N\cos\omega_nt+B_N\sin\omega_nt+x_c,\;\lbrack{\dot x}_N(t)<0\rbrack$$ | (2b) |
| $$\omega_n=\sqrt{k/m},\;x_c=F_c/k$$ | (2c) |
여기서, 아래첨자 ‘’은 반주기마다 반복되는 운동방향에 따른 마찰항의 부호변화를 구간별로 구분하기 위한 것으로 인 자연수로 정의된다. 과 은 각각의 반주기 구간별 변위와 속도의 초기조건에 의해서 결정되는 미지의 상수이다. [rad/sec]은 비감쇠 진동계의 고유진동수이고, [m]는 마찰력에 대한 강성 의 정적변형을 의미한다.
2.1.2 전 구간 확장 일반해
식 (2)에서 각 구간별 미지수를 결정하기 위해서 우선, 양(+)의 방향의 초기변위 와 초기속도 에 의해 구조물이 가진된다고 가정한다. 인 첫 번째 반주기 구간에서는 단자유도계의 운동은 오른쪽으로부터 왼쪽으로 이동하기 때문에 음(-)의 속도가 발생하여 식 (2b)가 적용되고, 에서 초기조건 와 을 대입하여 미지수 과 을 구하면 자유진동응답은 다음과 같다.
| $$x_1(t)=(x_0-x_c)\cos\omega_nt+x_c$$ | (3) |
단, 인 구간에 대해서 성립한다.
인 두 번째 반주기 구간에서는 단자유도계의 운동은 왼쪽으로부터 오른쪽으로 이동하기 때문에 양(+)의 속도가 발생하여 식 (2a)가 적용되고, 에서 초기조건 와 을 대입하여 미지수 와 를 구하면 자유진동응답은 다음과 같다.
| $$x_2(t)=(x_0-3x_c)\cos\omega_nt-x_c$$ | (4) |
단, 인 구간에 대해서 성립한다.
이상과 같은 과정을 인 반주기 구간에 대해서 반복하여 전 구간으로 확장한 일반해는 다음과 같다.
| $$x_N(t)=\{x_0-(2N-1)x_c\}\cos\omega_nt-(-1)^N・x_c$$ | (5) |
단, 인 자연수에 대해서 이고, 는 양수이다.
식 (5)는 질량이 오른쪽으로부터 왼쪽으로 이동하기 시작하는 양수의 초기변위 에 대한 일반해를 나타낸다. 질량이 왼쪽으로부터 오른쪽으로 이동하기 시작하는 음수의 초기변위 에 대해서는 양(+)의 속도를 나타내는 식 (2a)로부터 시작하여 동일한 과정을 거쳐 일반해를 유도하면 다음과 같다.
| $$x_N(t)=\{x_0+(2N-1)x_c\}\cos\omega_nt+(-1)^N・x_c$$ | (6) |
단, 인 자연수에 대해서 이고, 는 음수이다.
결과적으로 이고 또한, 부호함수 를 이용하여 식 (5)와 식 (6)을 통합하여 표현한 전 구간으로 확장된 변위 일반해와 이를 미분하여 구한 속도 및 가속도에 대한 일반해는 다음과 같다.
| $$x_N(t)=\mathrm sgn(x_0)\cdot\lbrack\{\left|x_0\right|-(2N-1)x_c\}\cos\omega_nt-(-1)^N\cdot x_c\rbrack$$ | (7a) |
| $${\dot x}_N(t)=-\mathrm sgn(x_0)\cdot\omega_n\{\vert x_0\vert-(2N-1)x_c\}\sin\omega_nt$$ | (7b) |
| $${\ddot x}_N(t)=-\mathrm sgn(x_0)\cdot\omega_n^2\{\vert x_0\vert-(2N-1)x_c\}\cos\omega_nt$$ | (7c) |
단, 인 자연수에 대해서 이다.
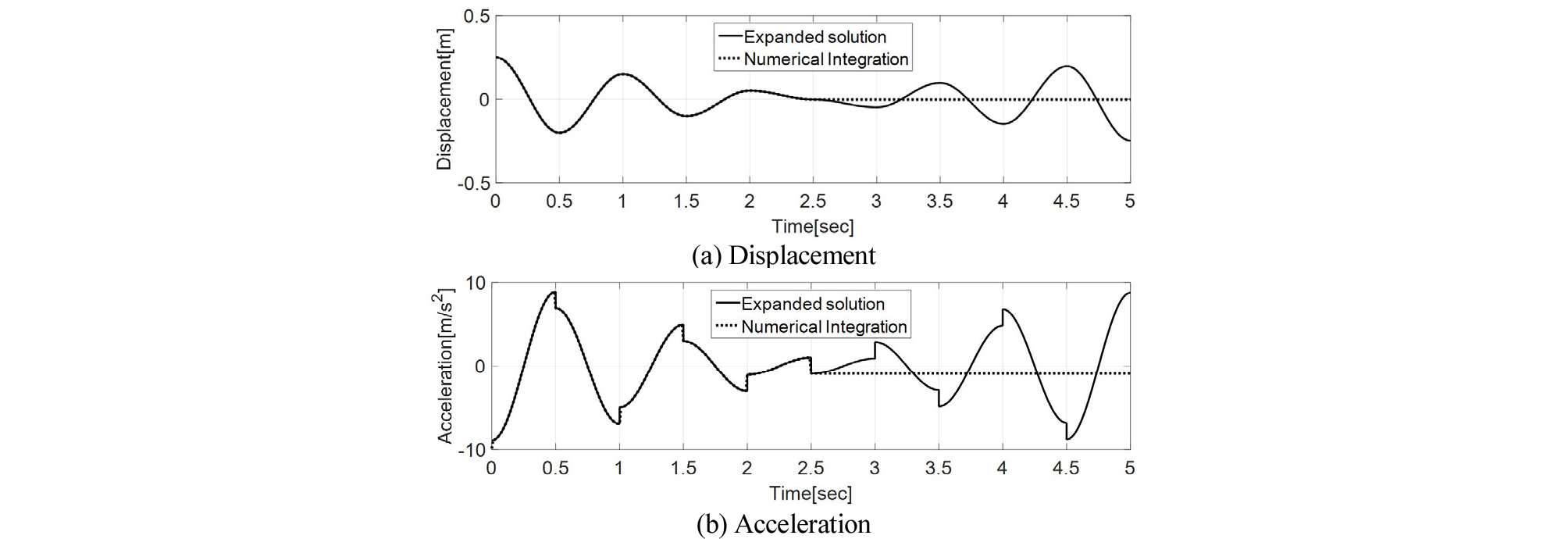
Fig. 2는 식 (7)의 확장된 일반해에 의해서 구한 자유진동응답과 식 (1)의 운동방정식을 직접 수치적분에 의해서 계산한 결과를 비교한 것이다. 단자유도계의 파라미터로 질량 100[ton], 고유진동수 1[Hz], 마찰계수 10[%] 및 초기변위는 0.25[m]를 적용하였으며, 반주기의 수 로 설정하였다. 두 결과 모두 반주기 수 인 2.5초 까지는 정확히 일치한다. 그러나 수치적분법에 의한 결과에서는 2.5초를 경과한 순간에 응답이 멈추지만, 확장된 일반해에 의한 결과에서는 마치 부감쇠 효과가 발생하는 구조물과 같이 외력이 작용하지 않음에도 불구하고 응답의 크기가 오히려 좌우 역대칭의 형태로 증폭되고 있음을 확인할 수 있다. 이러한 경향은 마찰력의 크기가 강성에 의한 복원력의 크기보다 커지는 순간에 자유진동 운동이 정지해야 하는 조건을 고려하지 않은 결과에 의한 것으로 식 (7)의 확장된 일반해에 추가적으로 쿨롱마찰에 의한 운동정지조건을 반영한 해를 유도할 필요가 있다.
2.2 운동정지조건을 고려한 닫힌 해
쿨롱마찰이 작용하는 동적시스템의 자유진동 운동이 정지하기 위해서는 우선, 운동속도가 0이 되어야 한다. 자유진동하는 동적시스템의 운동속도가 0이 되기 위해서는 운동방향이 바뀌는 순간 즉, 피크응답에서 운동속도가 0이 된다. 피크응답 을 구하기 위해서 식 (7)에서 을 대입하면, 과 이 되기 때문에 피크응답은 다음과 같다.
| $$x_N^p=(-1)^N\cdot\mathrm{sgn}(x_0)\{\vert x_0\vert-2Nx_c\}$$ | (8a) |
| $$\ddot x_N^p=-(-1)^N\cdot\mathrm{sgn}(x_0)\cdot\omega_n^2\{\vert x_0\vert-(2N-1)x_c\}$$ | (8b) |
여기서, 와 는 각각 인 자연수에 대한 피크변위와 피크가속도를 나타낸다.
번째 반주기에서 자유진동 운동이 정지한다고 하면, 운동이 정지하기 위한 또 다른 조건으로서는 마찰력의 크기가 식 (8a)를 만족하는 강성에 의한 복원력의 크기보다 커야 한다.
| $$\vert kx_L^p\vert\leq F_c\Leftrightarrow k\vert\vert x_0\vert-2Lx_c\vert\leq F_c$$ | (9) |
여기서, 는 번째 반주기에서 복원력의 크기를 의미한다. 식 (9)와 같은 부등식의 양변을 강성 로 나누면, 절대값의 성질에 의해 다음과 같이 표현된다.
| $$-x_c\leq\vert x_0\vert-2Lx_c\leq x_c$$ | (10) |
식 (10)을 에 대해서 정리하면 다음과 같다.
| $$\frac{\vert x_0\vert-x_c}{2x_c}\leq L\leq\frac{\vert x_0\vert+x_c}{2x_c}$$ | (11) |
여기서, 은 운동이 정지하는 반주기의 수를 의미한다.
식 (11)에서 오른쪽의 항은 이기 때문에 식 (11)을 만족하는 자연수는 오직 하나인 것을 알 수 있다. 최종적으로 운동정지조건을 고려한 닫힌 해는 식 (11)을 만족하는 자연수 을 구하고, 의 범위를 만족하는 자연수에 대해서 적용한 식 (7)의 확장된 일반해가 된다. 또한, 운동이 정지하는 순간의 변위와 가속도 값들은 식 (11)을 만족하는 유일한 자연수 을 식 (8)에 대입하여 구할 수 있다.
| $$x_L^p=(-1)^L\cdot\mathrm{sgn}(x_0)\{\vert x_0\vert-2Lx_c\}$$ | (12a) |
| $$\ddot x_L^p=-(-1)^L\cdot\mathrm{sgn}(x_0)\cdot\omega_n^2\{x_0-(2L-1)x_c\}$$ | (12b) |
여기서, 와 는 각각 운동이 정지하는 순간의 영구변위와 영구가속도 값들을 나타낸다.
Table 1은 제안한 닫힌 해를 구현하기 위한 단자유도계의 파라미터를 나타내는 것으로 모든 경우에 대해서 질량과 고유진동수는 동일하지만 마찰계수와 초기변위의 부호는 다르게 설정하였다. Fig. 3은 Table 1의 파라미터를 이용하여 운동정지조건을 반영한 식 (7)의 일반해를 나타내는 그래프와 수치적분에 의한 그래프를 비교한 것으로 Fig. 2에서 나타나는 응답증폭 효과는 더 이상 관찰되지 않고 운동이 멈추는 것을 알 수 있으며, 동일한 크기의 초기변위에 대해서 마찰계수가 클수록 운동이 정지하는 시간은 빨라지고 피크 가속도 응답의 불연속 특성은 더욱 확연해지는 것을 확인할 수 있다. Table 2는 식 (11) 및 수치적분에 의한 운동정지 반주기의 수와 식 (12)를 이용하여 계산한 영구변위 및 영구가속도를 나타낸다. 이와 같이 본 연구에서 제안한 닫힌 해는 주어진 단자유도계의 파라미터에 대해서 초기변위만 알 수 있으면 응답이 멈추는 시각과 응답의 크기를 정확히 예측할 수 있다.
Table 1 SDOF model with only coulomb-friction damping
| Cases | Mass [ton] | Natural Freq.[Hz] | Friction Coef.[%] | Initial Displ.[m] |
| Case1 | 100 | 1.0 | 10.0 | 0.25 |
| Case2 | 100 | 1.0 | 10.0 | -0.25 |
| Case3 | 100 | 1.0 | 5.0 | 0.25 |
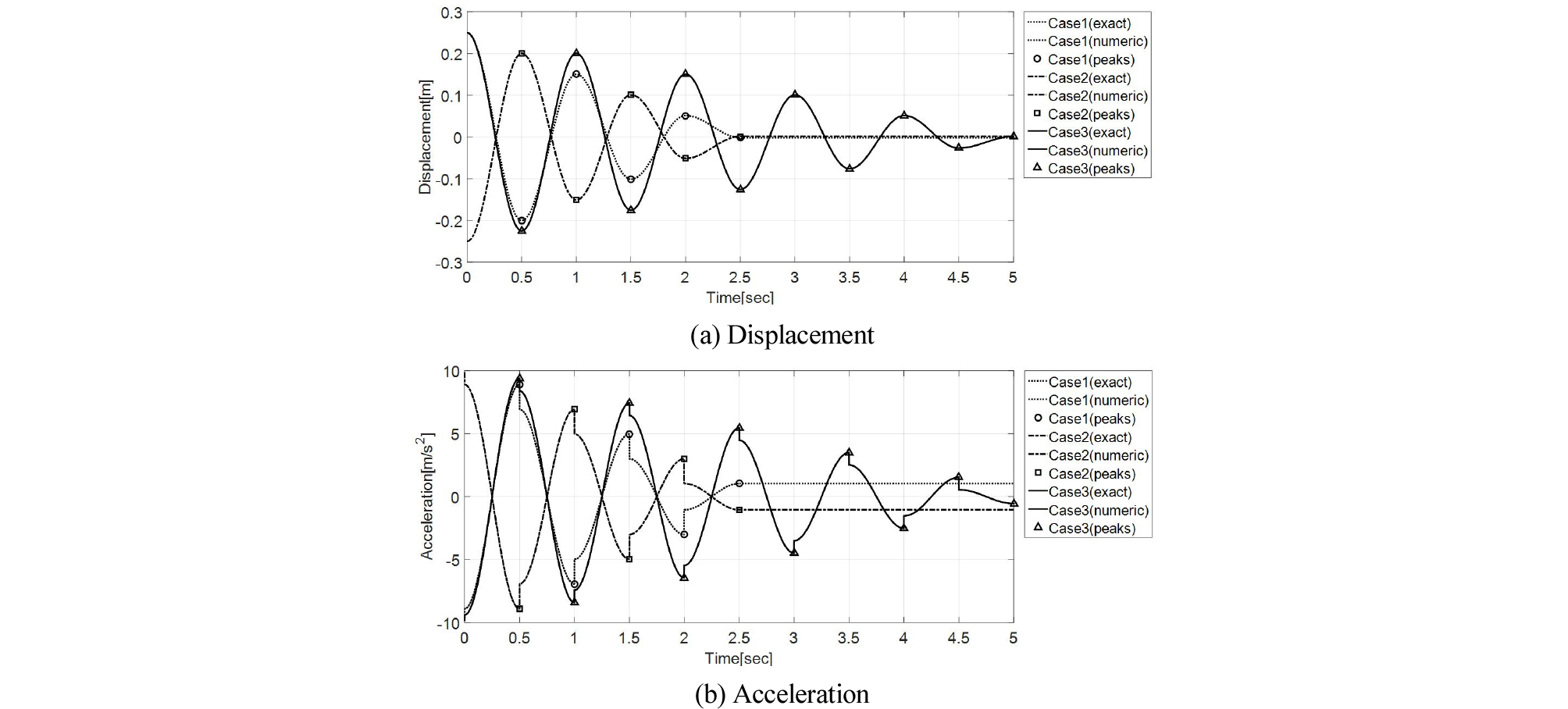
Table 2 Results calculated from closed-form solution
| Cases | No. of half cycle at motion-stopping | Permanent Displ.[m] | Permanent Accel.[m/s2] | |
| Exact | Numeric | |||
| Case1 | 5 | 5 | -0.0015 | 1.0406 |
| Case2 | 5 | 5 | 0.0015 | -1.0406 |
| Case3 | 10 | 10 | 0.0015 | -0.5501 |
3. 점성감쇠와 쿨롱마찰감쇠를 갖는 단자유도계
이 장에서는 단자유도계의 감쇠 항으로 점성감쇠와 쿨롱마찰감쇠를 동시에 고려한 단자유도계를 대상으로 확장된 일반해와 쿨롱마찰에 의한 운동정지조건을 반영한 닫힌 해를 유도하고자 한다.
3.1 자유진동응답의 일반해
3.1.1 반주기 구간별 일반해
Fig. 4는 질량, 강성, 점성감쇠와 쿨롱마찰감쇠로 구성된 단자유도계를 나타내며, 외력의 영향을 고려하지 않을 경우 운동방정식은 다음과 같다.
| $$m\ddot x(t)+c\dot x(t)+kx(t)+F_c・\mathrm{sgn}\{\dot x(t)\}=0$$ | (13) |
여기서, 는 점성감쇠계수[kN·s/m]를 나타낸다.

식 (13)의 운동방정식에서 마찰력이 포함된 항의 부호는 운동방향의 변화 즉, 속도의 부호를 따르고 있고 속도의 부호변화는 운동방향이 바뀌는 반주기 구간마다 발생하기 때문에 본 연구에서는 일반해가 번째 반주기 구간마다 변화하는 것으로 표현하였다. 또한, 점성감쇠의 영향으로 인해 지수함수도 나타나게 된다.
| $$x_N(t)=e^{-\xi_n\omega_nt}(A_N\cos\omega_dt+B_N\sin\omega_dt)-x_c,\;\lbrack{\dot x}_N(t)>0\rbrack$$ | (14a) |
| $$x_N(t)=e^{-\xi_n\omega_nt}(A_N\cos\omega_dt+B_N\sin\omega_dt)+x_c,\;\lbrack{\dot x}_N(t)<0\rbrack$$ | (14b) |
| $$\xi_n=c/2\sqrt{mk},\;\omega_d=\omega_n\sqrt{1-\xi_n^2}$$ | (14c) |
여기서, 인 자연수에 대해서 인 범위에 대해서 성립한다. 은 점성감쇠비[·]를 나타내고, 는 점성감쇠 진동계의 고유진동수[rad/sec]를 의미한다.
3.1.2 전 구간 확장 일반해
특정한 반주기 구간에 대한 일반해를 나타내는 식 (14)를 전 구간에 대해서 확장시키기 위해서는 미지의 상수 과 을 결정해야 한다. 각 구간별 상수를 구하기 위해서 초기속도는 0으로 하고, 양(+)의 방향으로 초기변위 에 의해서 자유진동 운동을 시작한다고 가정한다. 의 첫 번째 반주기 구간의 일반해는 질량이 오른쪽으로부터 왼쪽으로 이동하기 때문에 음(-)의 속도가 발생하여 식 (14b)가 적용되고, 에서 초기조건 와 를 대입하여 상수 과 을 구하면 다음과 같다.
| $$x_1(t)=e^{-\xi_n\omega_nt}(A_1\cos\omega_dt+B_1\sin\omega_dt)+x_c$$ | (15a) |
| $$A_1=x_0-x_c,\;B_1=\frac{\xi_n}{\sqrt{1-\xi_n^2}}A_1$$ | (15b) |
단, 의 범위에 대해서 성립한다.
의 두 번째 반주기 구간의 일반해는 질량이 왼쪽으로부터 오른쪽으로 이동하기 때문에 양(+)의 속도가 발생하여 식 (14a)가 적용되고, 에서 초기조건 와 를 대입하여 상수 과 를 구하면 다음과 같다.
| $$x_2(t)=e^{-\xi_n\omega_nt}(A_2\cos\omega_dt+B_2\sin\omega_dt)-x_c$$ | (16a) |
| $$A_1=(x_0-x_c)-2x_ce^\frac{\pi\xi_n}{\sqrt{1-xi_n^2}},\;B_2=\frac{\xi_n}{\sqrt{1-\xi_n^2}}A_2$$ | (16b) |
단, 의 범위에 대해서 성립한다.
의 반주기 구간의 일반해는 다시 식 (14b)가 적용되고 이상과 같은 과정을 반복하여 상수를 구하면, 다음과 같은 규칙을 발견할 수 있다.
| $$x_N(t)=e^{-\xi_n\omega_nt}(A_N\cos\omega_dt+B_N\sin\omega_dt)-(-1)^N\cdot x_c$$ | (17a) |
| $$A_N=(x_0-x_c)-2x_c\sum_{l=1}^{N-1}e^\frac{l\pi\xi_n}{\sqrt{1-\xi_n^2}},\;B_N=\frac{\xi_n}{\sqrt{1-\xi_n^2}}A_N$$ | (17b) |
단, 이다.
음(-)의 방향의 초기변위 에 대해서도 상기의 과정을 반복하여 유도한 일반해는 다음과 같다.
| $$x_N(t)=e^{-\xi_n\omega_nt}(A_N\cos\omega_dt+B_N\sin\omega_dt)+(-1)^N\cdot x_c$$ | (18a) |
| $$A_N=(x_0+x_c)+2x_c\sum_{l=1}^{N-1}e^\frac{l\pi\xi_n}{\sqrt{1-\xi_n^2}},B_N=\frac{\xi_n}{\sqrt{1-\xi_n^2}}A_N$$ | (18b) |
식 (17)과 식 (18)로부터 초기변위의 부호변화에 따라 마찰력에 의한 강성의 정적변형 가 포함된 항의 부호가 변화하는 것을 알 수 있다. 결과적으로 이고 또한, 부호함수 를 이용하여 식 (17)과 식 (18)을 통합하여 표현한 전 구간으로 확장된 변위 일반해와 이를 미분하여 구한 속도 및 가속도에 대한 일반해는 다음과 같다.
| $$x_N(t)=e^{-\xi_n\omega_nt}(A_N\cos\omega_dt+B_N\sin\omega_dt)-(-1)^N\cdot\mathrm{sgn}(x_0)\cdot x_c$$ | (19a) |
| $${\dot x}_N(t)=-e^{-\xi_n\omega_nt}\cdot\lbrack(\xi_n\omega_nA_N-\omega_dB_N)\cos\omega_dt+(\omega_dA_N+\xi_n\omega_nB_N)\sin\omega_dt\rbrack$$ | (19b) |
여기서, 인 자연수에 대해서 인 범위에 대해서 성립하며 상수 과 은 다음과 같다.
| $$A_N=\mathrm{sgn}(x_0)\cdot\left(\vert x_0\vert-x_c-2x_c\sum_{l=1}^{N-1}e^\frac{l\pi\xi_n}{\sqrt{1-\xi_n^2}}\right)$$ | (20a) |
| $$B _{N} = \frac {\xi _{n}} {\sqrt {1- \xi _{n}^{2}}} A _{N}$$ | (20b) |
식 (19)와 식 (20)에 을 대입하면, 점성감쇠를 고려하지 않은 일반해를 나타내는 식 (7)과 정확히 일치하는 것을 확인할 수 있다.
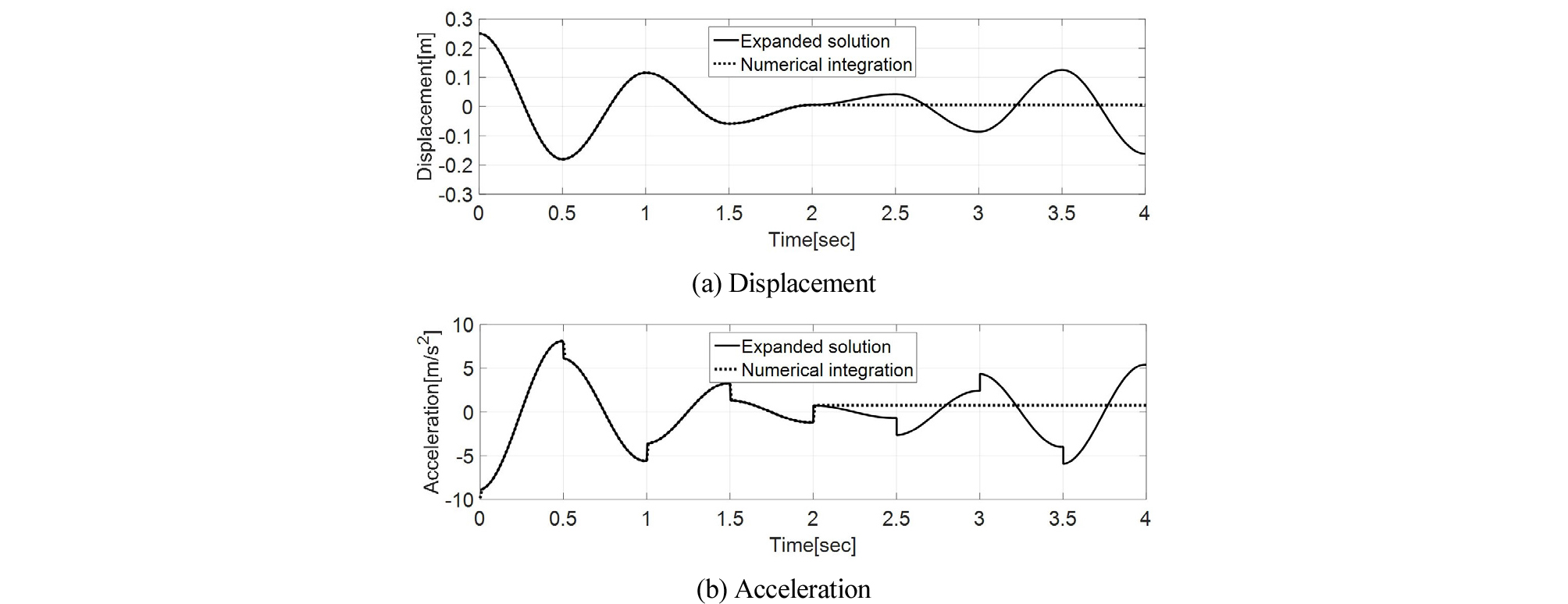
Fig. 5는 식 (19)의 확장된 일반해에 의해서 구한 자유진동응답과 식 (13)의 비선형 운동방정식을 직접 수치적분에 의해서 계산한 결과를 비교한 것이다. 단자유도계의 파라미터로 질량 100[ton], 고유진동수 1[Hz], 점성감쇠비 3[%], 마찰계수 10[%] 및 초기변위는 0.25[m]를 적용하였으며, 반주기의 수 로 설정하였다. 두 결과 모두 반주기 수 인 2.0초까지는 정확히 일치한다. 그러나 수치적분법에 의한 결과에서는 2.0초를 경과한 순간에 응답이 멈추지만, 확장된 일반해에 의한 결과에서는 응답이 증폭되기 때문에 쿨롱마찰에 의한 운동정지조건을 고려한 닫힌 해를 유도할 필요가 있다.
3.2 운동정지조건을 고려한 닫힌 해
쿨롱마찰이 포함된 동적시스템의 운동이 정지하기 위해서는 운동속도가 0이 되어야 하며, 마찰력의 크기가 강성에 의한 복원력의 크기보다 커야 한다.
운동속도가 0이 되는 순간에는 변위 또는 가속도 응답이 피크가 되기 때문에 식 (19)에 즉, 과 을 대입하면 피크응답은 다음과 같다.
| $$x_N^p=(-1)^N\cdot\left\{e^\frac{-N\pi\xi_n}{\sqrt{1-\xi_n^2}}\cdot A_N-x_f\cdot\mathrm{sgn}(x_0)\right\}$$ | (21a) |
| $${\ddot{x}} _{N}^{p} =-(-1) ^{N} ·( \xi _{n}^{2} \omega _{n}^{2} + \omega _{d}^{2} )e ^{\frac {-N \pi \xi _{n}} {\sqrt {1- \xi _{n}^{2}}}} ·A _{N}$$ | (21b) |
여기서, 와 는 각각 인 자연수에 대한 피크변위와 피크가속도를 나타내며, 은 식 (20a)와 동일하다.
또한, 번째 반주기에서 마찰력의 크기가 식 (21a)를 만족하는 강성에 의한 복원력의 크기보다 커진다면 다음과 같이 표현된다.
| $$\left|kx_L^P\right|\leq F_c$$ | (22) |
여기서, 는 번째 반주기에서 강성에 의한 복원력의 크기를 의미한다.
식 (22)의 양변을 강성 로 나누면 다음과 같다.
| $$\left|x_L^P\right|\leq x_c$$ | (23) |
식 (21a)에 식 (20a)를 대입한 결과를 식 (23)에 대입하여 절대값의 성질을 이용하면 다음과 같이 표현된다.
| $$-x_c\leq(\left|x_0\right|-x_c)e^\frac{-L\pi\xi_n}{\sqrt{1-\xi_n^2}}-2x_c\sum_{l=1}^{L-1}e^\frac{-l\pi\xi_n}{\sqrt{1-\xi_n^2}}-x_c\leq x_c$$ | (24) |
식 (24)의 중앙 항에 급수함수만 남기고 정리하면 다음과 같다.
식 (25)의 모든 항에 을 곱한 후 다시 모든 항에 를 더하면, 운동정지조건을 만족하는 부등식을 구할 수 있다.
| $$\frac{\left|x_0\right|-x_c}{2x_c}\leq\sum_{l=1}^Le^\frac{l\pi\xi_n}{\sqrt{1-\xi_n^2}}\leq\frac{\left|x_0\right|-x_c}{2x_c}+e^\frac{L\pi\xi_n}{\sqrt{1-\xi_n^2}}$$ | (26) |
여기서, 은 운동이 정지하는 반주기의 수를 의미한다.
식 (26)에 을 대입하면 점성감쇠를 고려하지 않은 경우의 운동정지조건을 만족하는 반주기의 수를 나타내는 식 (11)과 정확히 일치하는 것을 확인할 수 있다.
최종적으로 운동정지조건을 고려한 닫힌 해는 식 (26)을 만족하는 자연수 을 구하고, 를 만족하는 자연수에 대해서 적용한 식 (19)의 확장된 일반해가 된다. 또한, 운동이 정지하는 순간의 변위와 가속도 값들은 식 (26)을 만족하는 유일한 자연수 을 구하여 식 (20a)의 과 식 (21)의 대신에 대입하여 구할 수 있다. 이를 정리하면 다음과 같이 표현된다.
| $$x_L^P=(-1)^L\cdot\mathrm{sgn}(x_0)\cdot\left\{(\left|x_0\right|-x_c)e^\frac{-L\pi\xi_n}{\sqrt{1-\xi_n^2}}-2x_c\sum_{l=1}^{L-1}e^\frac{-l\pi\xi_n}{\sqrt{1-\xi_n^2}}-x_c\right\}$$ | (27a) |
여기서, 와 는 각각 운동이 정지하는 순간의 영구변위와 영구가속도 값들을 나타낸다. 식 (27)에 을 대입하면, 점성감쇠를 고려하지 않은 경우의 영구변위와 영구가속도를 나타내는 식 (12)와 정확히 일치하는 것을 확인할 수 있다. Table 3은 본 연구에서 제안한 닫힌 해를 구현하기 위한 단자유도계의 파라미터를 나타내고 있으며, Fig. 6은 운동정지조건을 반영한 식 (19)의 일반해를 나타내는 그래프와 수치적분에 의한 그래프를 비교한 것으로 운동정지조건을 고려하지 않은 Fig. 5에서 나타나는 응답증폭 효과는 더 이상 관찰되지 않고 운동이 정지하는 것을 확인할 수 있다. Table 4는 식 (26) 및 수치적분에 의한 운동정지 반주기의 수와 식 (27)에 의한 영구변위 및 영구가속도를 나타내는 것으로 본 연구에서 제안한 닫힌 해를 이용하여 응답이 멈추는 시각과 응답의 크기를 정확히 예측할 수 있다.
Table 3 SDOF model with both viscous and coulomb-friction damping
| Cases | Mass [ton] | Natural Freq.[Hz] | Viscous Damp.[%] | Friction Coef.[%] | Initial Displ.[m] |
| Case1 | 100 | 1.0 | 3.0 | 10.0 | 0.25 |
| Case2 | 100 | 1.0 | 3.0 | 10.0 | -0.25 |
| Case3 | 100 | 1.0 | 3.0 | 5.0 | 0.25 |
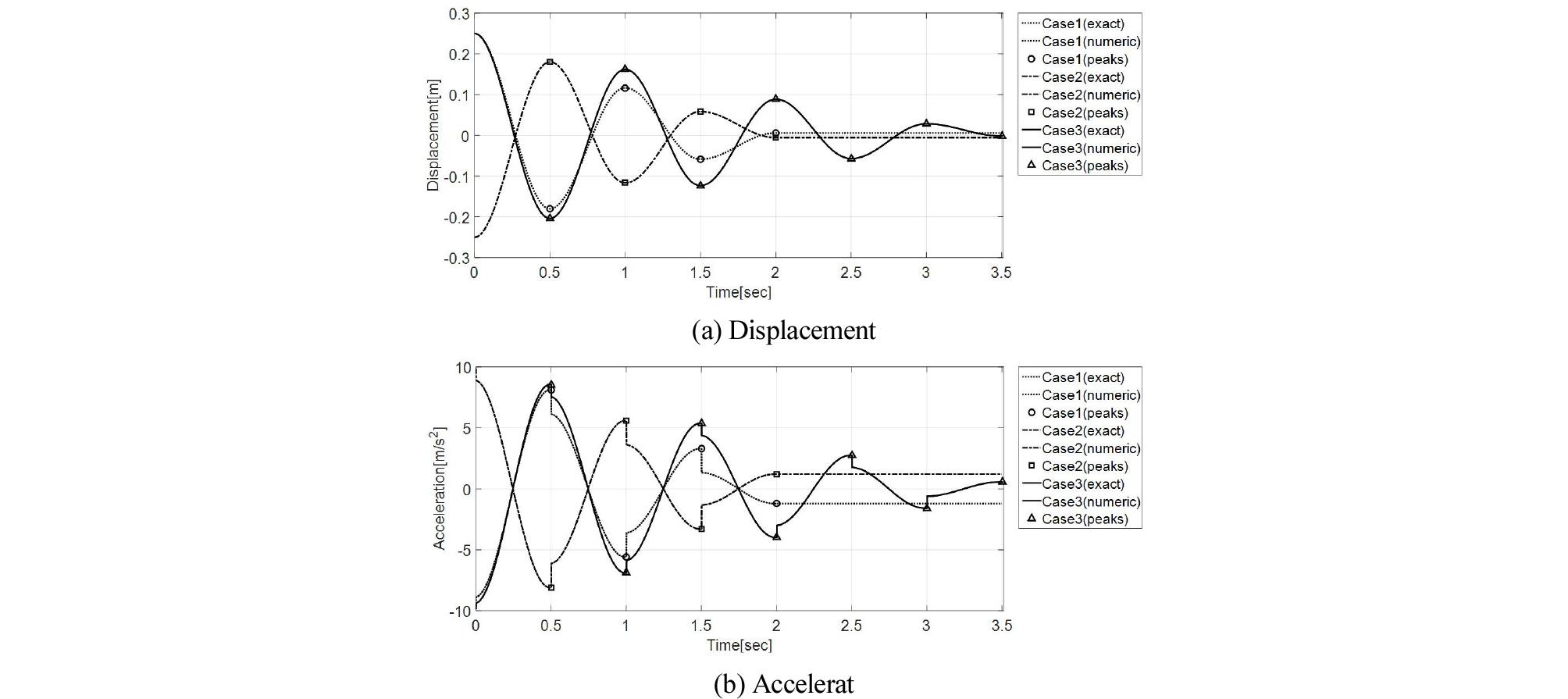
Table 4 Results calculated from closed-form solution
| Cases | No. of half cycle at motion-stopping | Permanent Displ.[m] | Permanent Accel.[m/s2] | |
| Exact | Numeric | |||
| Case1 | 4 | 4 | 0.0057 | -1.2070 |
| Case2 | 4 | 4 | -0.0057 | 1.2070 |
| Case3 | 7 | 7 | -0.0018 | 0.5609 |
4. 결 론
본 연구에서는 쿨롱마찰감쇠가 포함된 단자유도계의 자유진동응답을 이론적으로 정확히 예측할 수 있는 닫힌 해를 제안하였다. 닫힌 해는 첫째, 주어진 초기변위로부터 쿨롱마찰에 의해 자유진동 운동이 정지하는 순간까지의 반주기 싸이클 수 둘째, 운동이 정지하는 반주기 싸이클까지의 자유진동 운동을 재현할 수 있는 변위, 속도 및 가속도 응답에 대한 일반해 셋째, 운동이 정지하는 순간의 변위와 가속도 값들을 포함하고 있다.
이러한 닫힌 해를 이용하여 우선, 감쇠항으로써 쿨롱마찰감쇠만을 고려한 단자유도계의 자유진동응답을 재현하였으며 다음으로, 점성감쇠와 쿨롱마찰감쇠를 동시에 고려한 단자유도계의 자유진동응답을 구현하였다. 특히, 후자의 닫힌 해에서 점성감쇠비가 0인 경우에는 전자의 닫힌 해와 정확히 일치하는 것을 확인하였다.
본 연구에서 제안한 닫힌 해를 이용하면 주어진 초기변위에 대해서 운동이 정지하는 순간까지의 자유진동응답은 물론, 운동이 정지하는 순간의 시각과 변위 및 가속도 값들을 정확히 예측할 수 있다.
