

1. 서 론
본 연구는 최적설계 기법에서 많이 사용되는 위상최적설계 기법을 활용하여 다중구조물의 최적 연결위치를 계산하는 방법을 제시한다. 위상최적설계 기법은 구조물의 강성을 설계변수로 하는 최적설계 기법으로(Sigmund, 2001), 기존의 크기, 형상 최적설계에 비해 구조물의 위상을 설계변수로 하는 최적설계 기법이다. 구조물의 위상이 변할 수 있으므로 설계자가 예상하기 힘든 다양한 구조물을 최적화 알고리즘을 통해 자동으로 설계할 수 있어 초기 설계단계에서 널리 사용되는 설계기법중 하나이다. 다중구조물은 전체 구조물이 2개 이상의 부구조물로 나누어지고 부구조물들은 서로 조인트로 연결된 구조물을 의미한다. 이러한 다중구조물에 위상최적설계를 적용하는 경우 조인트의 연결 위치에 따라 부구조물의 최적형상이 변하게 되므로 조인트의 최적 위치를 정하는 것은 매우 중요하다(Chickermane and Gea, 1996).
유한요소해석으로 다중구조물을 해석하기 위해서는 먼저 다중구조물 간의 조인트를 모델링하여야 한다. 조인트를 모델링하는 방법은 매우 다양하게 연구되었으며, 본 연구에서는 조인트를 스프링으로 모델링하는 방법을 사용하였다. 조인트를 스프링으로 모델링하는 방법은 크게 2가지로 분류할 수 있다. 첫 번째 방법은 조인트 스프링의 유한요소 노드가 연결된 구조물의 유한요소 노드와 항상 정확하게 일치하는 경우이다(Chickermane and Gea, 1996; Kim et al., 2022; Li et al., 2001; Thomas et al., 2020). 이 경우 모든 조인트가 미리 정의된 위치에 존재하게 되므로 조인트 강성값으로 선정하므로 최적설계문제의 구현이 쉬워지는 반면, 조인트가 물리적으로 이동할 수 없어 조인트의 이동을 구현하기가 어렵다는 단점이 존재한다. 두 번째 방법은 조인트 노드가 연결된 부구조물의 노드와 일치하지 않고 독립적으로 모델링되는 경우이다(Ambrozkiewicz and Kriegesmann, 2021; Zhu et al., 2009). 이 경우 조인트의 노드가 직접적으로 구조물의 노드와 연결되지 않으므로 이를 연결하기 위한 추가과정이 필요하다. Zhu 등(2009)의 경우와 같이 조인트가 겹쳐있는 요소의 유한요소 메시를 재생성하여 이를 해결하는 방법도 많이 연구되었다. 하지만 조인트의 위치에 따라 매번 새로운 메시 생성이 필요하므로 해석시간이 증가하며, 메시 형상에 따른 국소 최적점이 생성되어 적절하지 않은 최적형상이 도출될 가능성이 존재한다. 이러한 단점들을 해결하기 위해 Ambrozkiewicz와 Kriegesmann(2021)에서는 조인트 노드와 구조물의 노드간의 변위가 동일하게 하는 조인트-노드 보간행렬을 추가하였다. 이 연구에서는 조인트-노드 보간행렬을 통해 조인트를 임의의 위치에 배치하고 조인트의 위치만을 변경함으로써 위상최적설계를 진행하였다. 하지만 이 방법은 조인트의 초기위치에 따라 최적형상이 달라지고 초기에 정해진 조인트의 개수가 변경되지 못한다는 단점이 존재하였다.
이번 연구에서는 이러한 단점들을 해결하기 위해 Kim 등 (2022)에서 개발한 조인트 구속조건을 개선하여 조인트가 이동함과 동시에 조인트의 강성도 함께 변할 수 있도록 모델링하였다. 기존 선행연구에서 추가로 개선된 조인트 분산(joint dispersal, JD) 구속조건은 최적화 과정에서 조인트간의 최소거리를 확보하도록 조인트의 강성값을 떨어뜨리며, 조인트의 위치를 서로 멀어지도록 한다. 조인트 분산 구속조건은 조인트의 거리와 강성을 동시에 변경할 수 있으므로 최적설계의 초기위치로 조인트를 좁은 영역에 매우 많이 배치하였다. 조인트 분산 구속조건을 미분이 가능하도록 p-norm합을 사용해서 구현하였으며, 유한차분법(finite difference method, FDM)과의 비교를 통해 정확성을 검증하였다. 조인트 분산 구속조건의 효과를 확인하기 위해 2개의 위상최적설계 예제문제를 해석하였다.
본 논문의 구성은 다음과 같다. 2장에서는 다중구조물, 조인트 모델링 및 조인트 분산 구속조건에 대해 설명하고 이를 활용한 위상최적설계 문제정식화를 제시하였다. 3장에서는 조인트 분산 구속조건의 효과를 검증하기 위한 2개의 최적화 예제를 제시하였으며, 마지막 4장에서는 본 논문의 결론과 향후 진행할 연구주제에 대해 논의하였다.
2. 문제 정식화
이 장에서는 위상최적설계 문제 정식화에 대해 설명하고, 조인트 위치를 고려한 유한요소해석 모델링 방법에 대해 설명한다. 조인트 강성과 위치를 적절히 배치하기 위한 조인트 분산 구속조건을 제시하고, 해당 구속조건의 유무에 따른 위상최적설계 결과를 비교하였다.
2.1 다중구조물을 고려한 위상최적설계
본 연구에서는 solid isotropic material with penalization (SIMP)기반 위상최적설계 기법을 다중구조물 및 조인트에 적용하는 방법에 대해 설명한다.
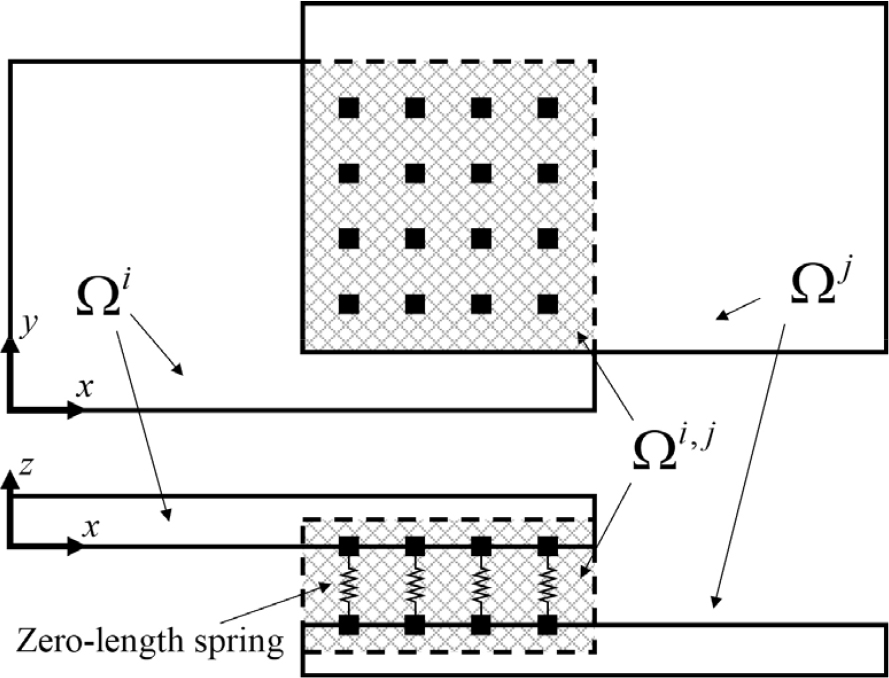
전체구조물은 Fig. 1과 같이 2개의 부구조물(subdomain, )으로 나누어져서 모델링된다. 각 부구조물은 2차원 Q4 요소로 이루어져 있으며, 빗금으로 표시한 조인트 영역(joint domain, )에서 겹쳐서 모델링된다. 조인트 영역에는 길이가 0이고 강성이 매우 강한 선형스프링 요소(조인트)가 모델링되며, 조인트를 통해 각 부구조물이 물리적으로 연결된다.
Fig. 1과 같이 서로 조인트로 연결된 부구조물의 강성행렬은 다음 식 (1)과 같이 부구조물의 강성행렬(), 조인트의 강성행렬()과 조인트-노드 보간행렬()의 합으로 정의할 수 있다.
위 식에서 는 각각 부구조물의 강성 설계변수, 조인트의 강성 설계변수, 조인트의 위치를 나타낸다. 는 조인트 노드와 부구조물의 노드를 변위를 통해 연결하도록 하는 조인트-노드 보간행렬로, 2.2장에서 자세하게 설명할 것이다.
식 (1)의 강성행렬들은 아래 식 (2), (3a), (3b)와 같이 부구조물의 강성 설계변수 와 조인트의 강성 설계변수 의 함수로 나타낼 수 있다.
위 식의 m, NE, 은 각각 부구조물의 개수, 부구조물의 유한요소의 개수, 조인트 영역의 스프링 조인트의 개수를 나타낸다. 추가로 는 스프링 조인트의 최대강성, 는 조인트와 연결된 부구조물의 강성행렬의 대각선 성분의 최댓값을 나타낸다. 식 (2)는 SIMP 기법에서 사용되는 강성계산 방법으로, 부구조물의 강성은 각 요소가 가지는 의 3승에 비례한다.
식 (3a), (3b)는 조인트 강성을 계산하기 위한 수식이다. 각 부구조물을 연결하는 스프링 조인트는 강성이 매우 강한 강체 스프링을 모사해야 하므로 최대강성값이 상당히 크게 설정된다. 이 경우 를 기존 SIMP방법처럼 조인트 설계변수 의 3승으로 계산해서 최적설계를 진행하면 조인트 설계변수가 0 또는 1로 잘 수렴하지 않는 문제가 발생한다. 이는 의 최대강성값이 와 비교하면 매우 큰 값이므로 조인트 설계변수가 비교적 적은 값(약 0.1) 정도가 되더라도 충분히 강한 강성을 가지기 때문이다. 이를 방지하기 위해 Yoon 등(2008)에서 사용한 수식을 사용하면 식 (3)과 같고, 이를 통해 조인트 설계변수 값이 0 또는 1로 수렴하도록 하였다.
위상최적설계의 목적함수로는 구조물의 compliance 값이 사용되었으며, 최적설계 문제정식화는 다음과 같다.
여기서, 는 선형 구조물의 compliance 값을 나타낸다. 값은 번째 부구조물의 부피 구속조건으로, 설계변수 의 합이 보다 작도록 하는 구속조건이다. 조인트의 경우 최대개수 구속조건은 없으며 후술할 조인트 분산 구속조건으로 개수가 조절된다.
최적화 과정에서 해석 안정성을 위해 부구조물의 강성 설계변수 는 의 하한선을 가지며 최대값은 1이다. 조인트 강성 설계변수 는 조인트 스프링의 연결유무를 표현하기 때문에 하한선으로 0을 갖는다. 조인트 위치 설계변수 는 조인트의 위치를 나타내며, 최적화 과정에서 조인트 영역을 넘어가지 못하도록 과 값을 하한선, 상한선으로 하는 구속조건을 갖는다.
값은 조인트 분산 구속조건으로, 조인트간의 최소거리 조건을 구현한 것이다. 조인트 분산 구속조건에 대한 내용은 2.2장에서 자세하게 다룰 것이다.
2.2 조인트 모델링 및 최소거리 구속조건
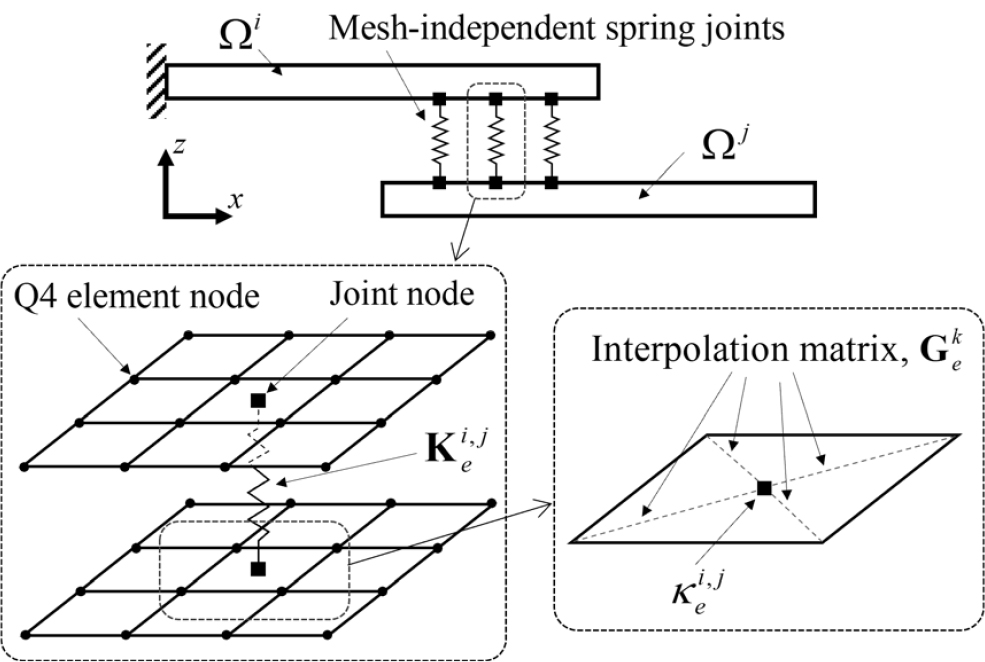
두 개의 부구조물 사이에는 부구조물의 노드 위치와 무관하게 움직일 수 있는 스프링 조인트가 Fig. 2와 같이 모델링된다. 조인트의 양단에는 조인트 노드(joint node)가 존재한다. 조인트 노드는 부구조물의 노드와 무관하게 위치할 수 있으므로, 부구조물과 조인트는 물리적으로 연결되어 있지 않다. 이 경우 조인트의 위치에 상관없이 조인트가 부구조물에 힘을 전달하기 위해서는 식 (1)의 강성행렬을 변위벡터와 조인트-노드 보간행렬 로 나타내면 식 (4)와 같이 나타낼 수 있다.
여기서, 과 는 각각 부구조물의 변위와 조인트의 변위를 나타내며, 보간행렬 를 통해 연결된다. 는 에 따라 계산되는 중간값으로 목적함수인 compliance 계산에는 사용되지 않는다. 여기서 는 식 (5a), (5b), (5c)를 통해 계산한다.
여기서, 와 𝜉는 각각 조인트가 속해있는 부구조물의 Q4 요소의 형상함수와 로컬좌표계를 나타낸다. 식 (5b)를 통해 Q4 요소의 노드 4개의 변위 가중합이 해당 조인트 노드의 변위값과 동일해야 한다. 여기서 가중치 는 식 (5c)를 통해 조인트 노드의 로컬좌표계 기준 Q4 요소의 형상함수값으로 정해진다. 즉, 식 (5a), (5b), (5c)를 사용하면 조인트 노드가 Q4 요소에 직접적으로 연결되어 있지 않더라도 변위의 적절한 분배를 통해 힘이 전달된다.
모든 조인트는 설계변수로 강성 설계변수 와 위치 설계변수 를 가진다. 조인트는 설계변수를 2개씩 가지므로 조인트가 서로 떨어지게 하는 조건을 만들 때 조인트 강성과 위치를 모두 고려해야 한다. 본 연구에서는 조인트가 뭉치는 것을 방지하기 위해 기존 연구(Kim et al., 2022)에서 제안하였던 조인트 분산(joint dispersal, JD) 구속조건을 다음과 같이 확장하였다.
여기서, 는 조인트 영역 의 번째 조인트에서 계산한 조인트 분산 구속조건 값이다. 는 조인트 와 거리가 이하인 영역을 나타낸다. 는 와 영역 내의 다른 조인트와의 거리를 정규화한 값이다.
새로 제시하는 조인트 분산 구속조건은 식 (6b)와 같이 조인트 와 인접한 조인트들의 설계변수들의 합을 해당 영역에서의 설계변수의 최대값과의 차이로 계산한다. 값이 0이나 음수가 되기 위해서는 영역 내의 조인트가 한 개만 있거나, 모든 조인트의 설계변수 값이 0이 되어야 한다. 즉, 식 (6b)를 만족할 수 있다면 조인트들은 서로 이상 떨어져 있거나, 영역 내의 조인트는 하나만 존재해야 한다. 민감도 기반 최적설계 알고리즘을 사용하므로 식 (6b)를 미분가능한 수식으로 변경해야 한다. 이를 위해 max 함수는 수치적으로 비슷한 p-norm 함수(=20)로 변경하고, 오차를 보정하기 위해 𝜀=0.0001 값을 빼 주었다.
최적화 과정에 추가하기 위해 식 (6b)를 조인트 설계변수 와 에 대해 미분하면 다음과 같이 표현할 수 있다.
조인트 분산 구속조건 (6b)를 에 대해 미분하면 (7a)이고, 에 대해 미분하면 (7b)와 같이 나타낼 수 있다. 위 수식으로 계산한 조인트 분산 구속조건과 이를 미분한 값을 기존의 위상최적설계의 구속조건으로 추가하면 부구조물에 연결된 조인트의 최적 위치를 계산할 수 있다.
3. 수치예제 및 고찰
이 장에서는 앞서 제안한 다중구조물, 조인트 모델링을 진행한 뒤 조인트 분산 구속조건의 민감도 검증 후 2개의 위상최적설계 예제를 해석하고 결과에 대해 분석한다. 모든 예제문제의 부구조물의 최대부피값 는 0.4로 설정하였으며, 0.25m 크기의 정사각형 Q4 요소로 모델링되었다. 위상최적설계 알고리즘으로는 Svanberg(1987) 연구의 method of moving asymptotes(MMA) 방법을 적용하였다.
3.1 외팔보
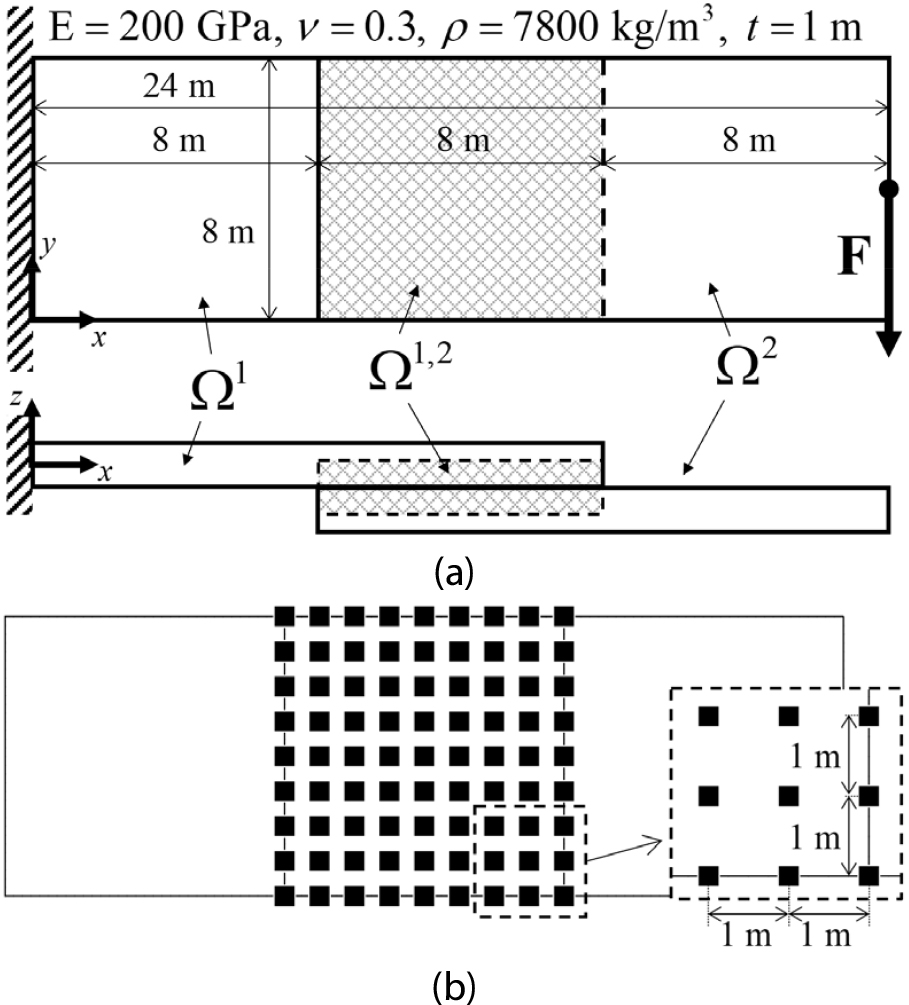
첫 번째 예제의 해석 대상은 Fig. 3(a)와 같이 2개의 부구조물로 이루어진 외팔보(Cantilever) 형상이다. 첫 번째 부구조물 의 좌측에 경계조건이 있으며, 외력은 두 번째 부구조물 의 우측에서 아래 방향으로 가해진다. 부구조물 과 는 빗금친 영역인 조인트 영역 에서 조인트 스프링으로 서로 연결되어 있다. 전체 유한요소 노드의 개수는 4,614개이며 설계변수는 총 4,339개이다. 조인트의 초기위치는 Fig. 3(b)와 같이 영역에 1m 간격의 격자모양으로 총 81개가 모델링되었다. 조인트는 검은색 사각형 모양으로 나타내었으며, 사각형의 크기는 조인트의 설계변수 에 비례한다. 값이 1에 가까울수록 사각형의 크기가 커지고 값이 작아질수록 사각형의 크기는 작아지며, 값이 0에 가까워지면 조인트가 연결되지 않음을 나타낸다.
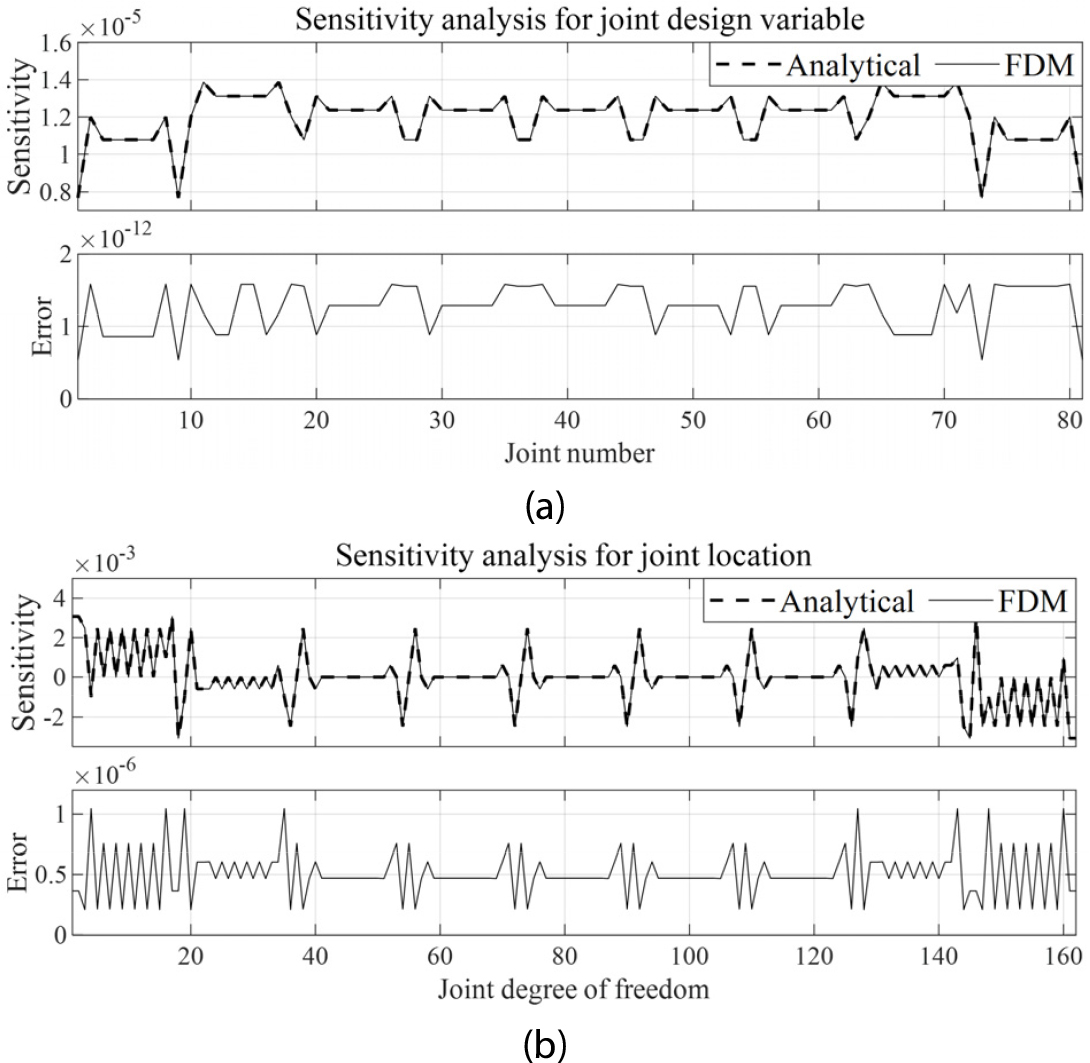
위상최적설계에 앞서 계산하였던 JD 구속조건을 미분한 계산식 (7a), (7b)를 검증하기 위해 Fig. 3의 외팔보 모델을 대상으로 JD 구속조건의 민감도 해석을 수행하였다. 민감도 해석은 미분식 (7a), (7b)으로 계산한 값(analytical)과 조인트 설계변수의 변화에 대한 식 (6a), (6b), (6c) 값의 변화를 유한차분법으로 계산한 결과와 비교한 것이다. 유한차분법으로는 후방차분법(backward FDM)이 사용되었으며 계산할 때 차분값으로는 10-5이 사용되었다. 조인트 분산 구속조건을 조인트 설계변수 에 대해 미분한 결과는 Fig. 4(a)이며, 조인트의 위치에 대해 미분한 결과는 각각 Fig. 4(b)와 같다. 각각의 그래프에는 analytical 결과와 FDM 결과를 함께 그래프로 그리고, 두 결과의 차이를 아래에 각각 표시하였다. Fig. 4(a)의 경우 민감도 값은 약 0.8×10-5~1.4×10-5의 범위이지만, 그 차이는 0.5×10-12~1.5×10-12로 매우 적다. 마찬가지로 조인트의 위치에 대한 민감도 결과인 Fig. 4(b)의 경우 민감도 값의 크기가 약 10-3 정도인 반면에 그 오차는 약 10-6 정도이다. 두 경우 모두 오차값이 민감도 결과값보다 적기 때문에 본 연구에서 진행한 조인트 분산 구속조건에 대한 검증을 완료되었다.
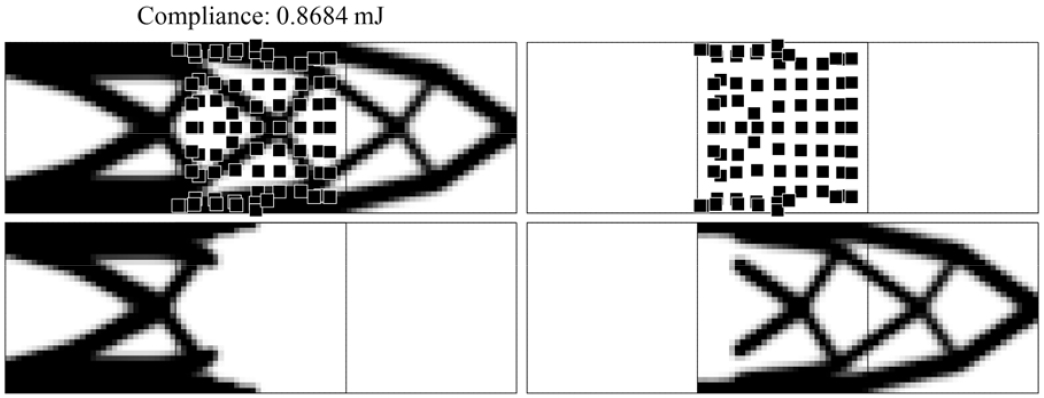
위상최적설계에서 조인트 분산 구속조건의 영향을 파악하기 위해 먼저 Fig. 3 모델에 조인트 분산 구속조건을 적용하지 않은 채 compliance 최소화 위상최적설계를 수행한 결과는 Fig. 5와 같다. Fig. 5는 좌측 위 그림부터 반시계방향으로 각각 전체모델, 부분, 부분, 부분의 최적설계 결과를 각각 나타낸다. 부구조물의 최적화 결과 검은색 부분은 값이 1에 가까운 위치라서 강성이 강하게 부여되는 부분이며, 흰색 부분은 값이 거의 0이라 강성이 매우 작아서 비어있는 공간이다. 위상최적설계 문제정식화 (3)과 같이 조인트에는 최대부피(최대개수) 구속조건이 없고, 조인트 분산 구속조건을 적용하지 않았기 때문에 최적설계 결과 조인트의 개수와 조인트 강성은 변하지 않고 조인트의 위치만 이동한다. 구조물의 compliance가 작아지기 위해서는 전체적인 구조물의 변형이 적어야 하는데, 구조물의 변형이 적어지기 위해서는 조인트가 최대한 많이 연결되어야 하므로 조인트의 개수와 조인트의 강성은 최대값에서 감소하지 않은 결과를 얻을 수 있었다.
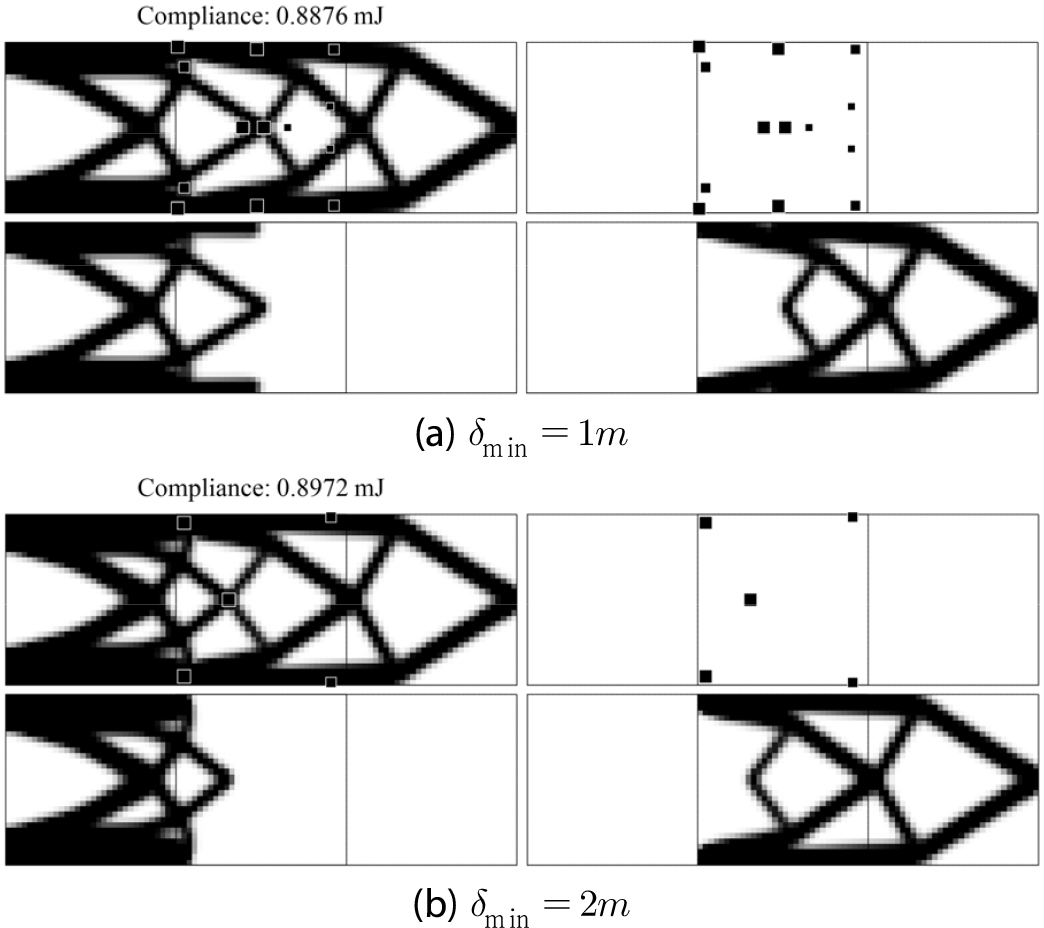
조인트 분산 구속조건의 효과를 비교하기 위해 Fig. 5와 동일한 모델에 조인트 최소거리를 적용한 결과는 Fig. 6과 같다. Fig. 6(a)는 조인트 최소거리가 이며, Fig. 6(b)에는 조인트 최소거리가 이다. 조인트 분산 구속조건이 추가된 최적설계 결과 조인트의 위치가 Fig. 5와 비교해서 조인트가 뭉치지 않고 최소거리 을 만족한 최적화 결과를 얻을 수 있었다. 마찬가지로 값이 커짐에 따라 조인트의 최소거리 역시 증가한 결과를 얻을 수 있었다. 또한 조인트 분산 구속조건이 적용된 두 경우 모두 최적화 결과 compliance 값이 조인트 분산 구속조건이 적용되지 않은 Fig. 5의 compliance보다 큰 것을 확인할 수 있다. 이는 조인트 분산 구속조건이 추가되면서 조인트의 위치가 흩어지게 되고, 동시에 조인트 설계변수 가 감소해서 조인트 강성이 같이 약해졌기 때문이다.
3.2 L형상 모델
두 번째 예제는 Fig. 7과 같이 2개의 부구조물로 이루어진 L형상 모델이다. 첫 번째 부구조물 의 상단에 경계조건이 있으며 두 번째 부구조물 의 우측 상단에 아래 방향으로 외력이 가해진다. 앞선 Fig. 3 예제와 마찬가지로 두 부구조물이 만나는 위치에 조인트가 모델링되며, 조인트는 Fig. 7의 오른쪽 위 그림과 같이 1m 간격으로 총 81개가 모델링되었다. 전체 노드는 5,508개이며, 설계변수는 총 5,363개이다.
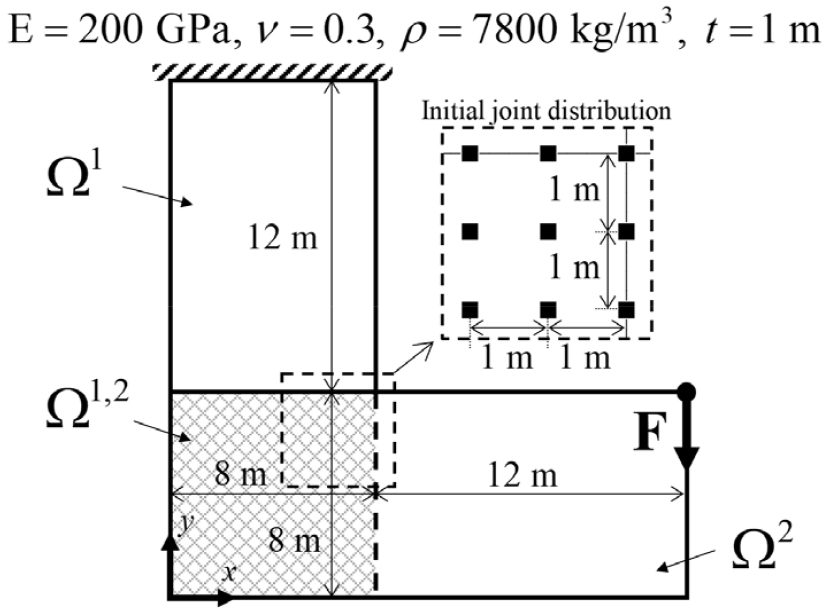
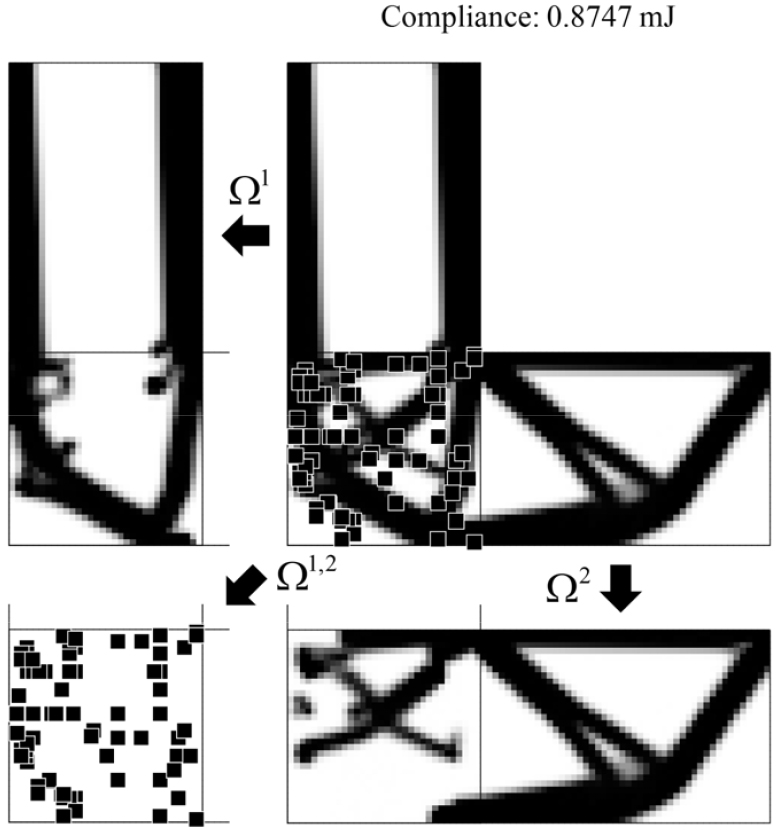
Fig. 7 모델로 조인트 분산 구속조건을 적용하지 않고 최적설계를 진행한 결과는 Fig. 8과 같다. Fig. 8 그림은 오른쪽 위 그림부터 반시계 방향으로 각각 전체모델, 부분, 부분, 부분의 최적화 결과를 나타낸다. 앞선 첫 번째 예제의 Fig. 5와 마찬가지로 조인트 분산 구속조건이 없으므로 compliance 최소화를 위해 모든 조인트는 최대강성을 가지며 초기 위치에서 벗어나 특정 위치에서 서로 겹치는 결과를 얻을 수 있다.
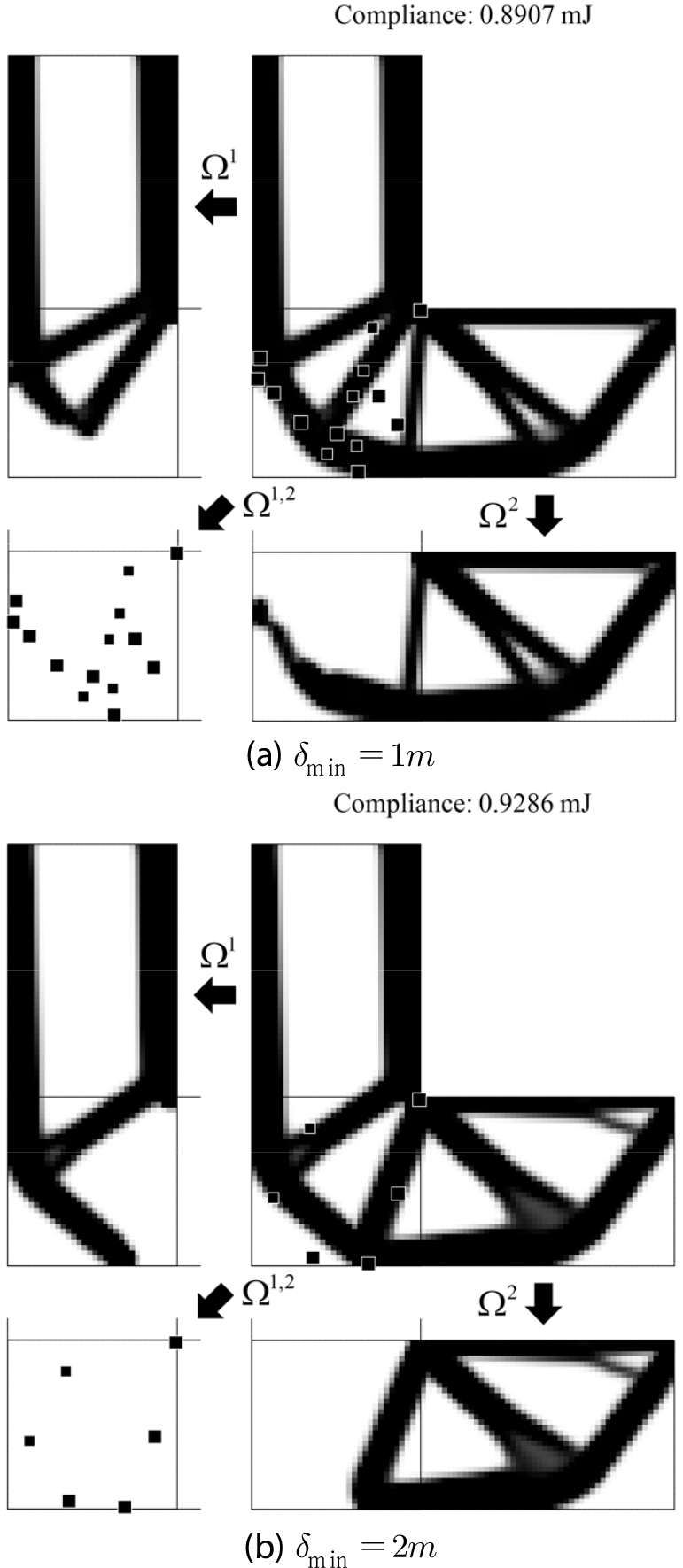
JD 구속조건을 적용한 결과는 Fig. 9와 같다. 의 값이 1m에서 2m로 변경되면서 조인트들의 최소거리가 증가한 결과를 얻을 수 있었으며, 마찬가지로 조인트의 개수 역시 줄어든 결과를 얻었다. Fig. 8 결과처럼 대부분의 영역에서 조인트가 존재하는 결과와는 달리 조인트들이 필요한 위치에만 존재하게 되므로 가 커짐에 따라 최적화 결과 compliance 값이 커지는 결과를 얻을 수 있다.
4. 결 론
본 연구에서는 다중구조물이 조인트로 연결될 때 각 조인트 간의 최소거리 조건을 간단한 수식으로 제안하고, 이를 활용하여 최적의 조인트 위치 및 구조물의 형상을 위상최적설계 기법으로 계산하였다. 조인트는 강성이 매우 강하고 길이가 0인 스프링 요소로 모델링되었다. 조인트가 Q4 요소의 내부에 존재하는 경우 Q4 요소의 형상함수를 통해 조인트 스프링의 노드와 Q4 요소가 서로 연결되도록 모델링하였다. 이를 통해 조인트 노드는 Q4 요소 내부에서 자유롭게 이동할 수 있었다.
위상최적설계의 목적함수로는 전체 구조물의 compliance 값이 사용되었으며, 최적설계 알고리즘으로는 MMA 방법이 사용되었다. Compliance 최소화 문제에 조인트 모델링을 적용하면 필연적으로 조인트들이 특정 위치로 뭉치는 현상이 발생한다. 이러한 현상을 방지하기 위해 기존에 제안한 조인트의 최소거리 조건인 조인트 분산 구속조건을 확장해서 조인트의 강성값과 위치를 모두 고려하도록 개선하여 위상최적설계에 적용하였다. 두 개의 구조물이 조인트로만 연결되는 경우 위상최적설계 결과 조인트 분산 구속조건을 적용하지 않으면 조인트들이 특정 위치로 뭉치는 결과가 나온 반면, 조인트 분산 구속조건을 적용하면 조인트 최소거리에 따라서 조인트들이 흩어진 결과를 얻을 수 있었다. 최적설계 시 조인트는 최대개수 구속조건이 없고 오직 조인트 분산 구속조건에 영향을 받아 조인트의 거리를 유지한 채 전체적인 조인트의 개수가 줄어들게 된다. 조인트 분산 구속조건을 활용하면 최적설계 결과 조인트의 위치와 강성을 설계한과 동시에 연결되어 있는 구조물의 최적형상을 얻을 수 있다.
