

1. 서 론
반도체 공정에서는 빛의 간섭효과를 보정한 포토레지스트 마스크 설계 기법 개발이 필수적이다. 포토레지스트 공정에서의 핵심은 마스크를 통과한 빛으로 맺힌 상이 원하는 형상을 띄는 것에 있다. 하지만 이러한 형상을 만들기 위해서 빛의 간섭효과를 보정해야 한다. 본 논문에서는 마스크 설계에 다양한 위상 최적설계 기법을 적용해 보고, 광학 근접 보정하는 성능을 비교하는데 목적이 있다.
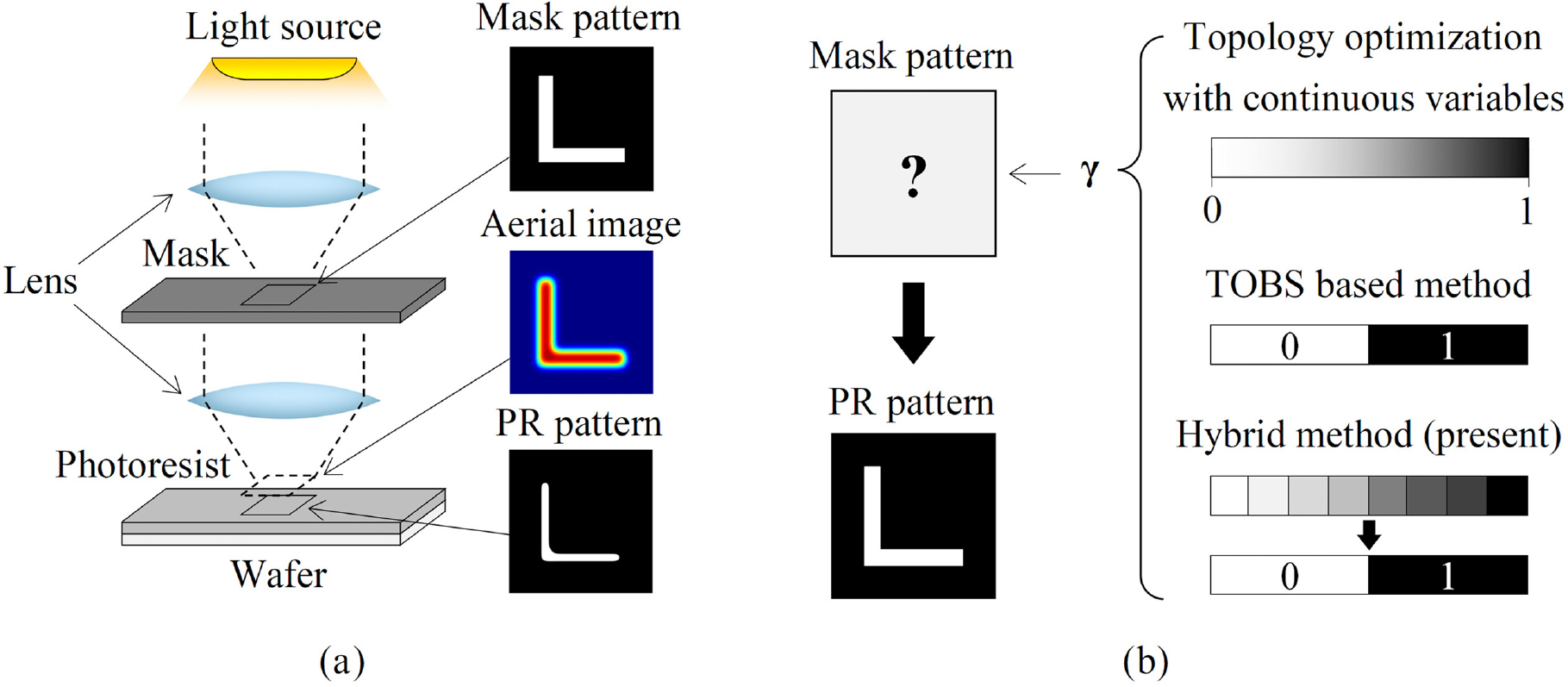
반도체 공정에서 포토리소그래피 공정, 산화 공정, 식각 공정, 도핑 공정 등이 있다. 그 중 포토리소그래피 공정에 존재하는 빛의 간섭 효과 보정(Optical Proximity Correction, OPC)은 반도체의 품질을 결정하는 중요한 요소 중 하나이다. Fig. 1(a)는 포토리소그래피 과정을 해석하는 과정을 보여주고 있다. 이 과정에는 빛과 맞닿는 마스크 패턴(Mask pattern), 푸리에 변환으로 빛의 간섭 효과를 보정한 에어리얼 이미지(Aerial image), 실제 마스크를 투과한 빛이 웨이퍼 상에 맺힌 포토레지스트 패턴(PR pattern)이 존재한다(De Bisschop, 2016). 그러나 실제 마스크 패턴과 PR 패턴 사이에 차이가 존재하기 때문에, 목표한 PR 패턴을 설계하기 위해 다양한 연구가 진행되어 왔다. 원하는 PR 패턴을 설계하기 위한 방식으로 규칙 기반 OPC와 모델 기반 OPC가 존재한다(Gu and Zakhor, 2008). 규칙 기반 OPC는 다양한 실험을 통해 마스크 설계를 보정 방식을 의미하며, 모델 기반 OPC는 물리적 모델을 시뮬레이션하여 마스크 설계 보정을 수행하는 방식을 의미한다. 모델 기반 OPC에서는 해석 시간이 오래 걸리기 때문에 데이터 기반 해석을 통한 해석 시간 단축 연구와 회귀 모델을 활용한 해석 시간 효율화 연구가 진행되었다(Gu and Zakhor, 2008; Xiao et al., 2023). 전통적인 OPC 설계 방식에서는 마스크 일부 요소를 움직여 가며 보정 효과를 시뮬레이션과 실험으로 확인하며 설계를 진행한다. 이러한 경험적 설계를 통해 OPC 마스크 형상을 얻기에는 한계가 있기 때문에 위상 최적설계 기법을 이용하여 OPC 마스크를 설계하는 연구가 필요하다.
최적설계 기법 중 하나인 위상 최적설계는 요소의 밀도를 설계변수로 설정하고 민감도를 기반하여 구조물의 위상을 결정하는 최적설계 기법이다. 민감도 기반 위상 최적설계 알고리듬은 다양한데, 이 중 Method of Moving Asymptotes(MMA)을 활용한 위상 최적설계 연구가 활발히 진행되어져 왔다(Svanberg, 1987; Yoon, 2010). 최근에는 설계변수가 연속적인 값으로 이루어져 있는 기존 위상 최적설계 방식과 다르게 0과 1인 이진수를 기반 하여 최적설계를 진행하는 이진 구조 최적설계(Topology Optimization of Binary Structure) 알고리듬이 개발되었다(Sivapuram and Picelli, 2018). 이진 구조 최적설계는 요소의 밀도가 0과 1 두 값 중 하나로 선정되어 최적화를 진행한다. 이진 구조 최적설계 알고리듬을 이용한 다양한 연구가 진행되어 왔다(Kiyono et al., 2023; Mendes et al., 2022; Picelli et al., 2020).
OPC를 위한 마스크의 최적설계에 대한 필요성이 증가함에 따라, 최근에는 민감도 기반 위상 최적설계를 활용하여 OPC 마스크를 설계하는 연구가 진행되었다(Eriksen et al., 2018; Zhou et al., 2014; Zhou et al., 2017). 하지만 기존에 진행된 민감도를 활용한 OPC 최적설계 논문에서는 설계변수가 0과 1로 가기 위해 추가적인 제약조건을 주어야만 하는 단점이 존재한다. 본 논문에서는 이런 추가적인 제약조건이 없더라도 정수 최적설계를 이용하여 0과 1로 설계변수가 진행되는 TOBS 방식을 이용하여 기존 방법과 비교한다. 또한 기존 TOBS에서는 비선형성이 큰 목적함수에서는 결과가 잘 나오지 않은 문제가 존재한다. 따라서 이 연구에서는 Fig. 1(b)에서와 같은 발전시킨 방법을 고안하여 최적화를 진행한다. 분할된 다수의 변수 개수를 점진적으로 줄여 나가 결국에는 두 개의 변수(0과 1)로 만드는 완화된 TOBS를 고안하고 세 가지 방법(연속 변수 기반, TOBS, 새롭게 개발된 완화된 TOBS)을 비교한다.
2. 본 론
이 장에서는 광학 근접 보정 기술에 대하여 소개한 후, 위상 최적설계 기법을 이용해 광학 근접 보정을 하기 위한 최적설계 정식화와 다양한 종류의 최적화 알고리듬을 소개한다.
2.1 광학 근접 보정
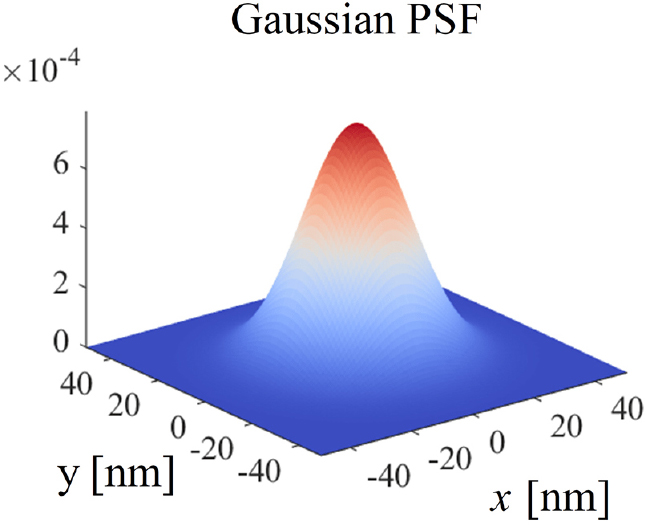
광학 근접 보정 기술을 적용하기 위한 포토레지스트 패턴을 구하는 시뮬레이션에서는 일반적으로 점 확산 함수(Point Spread Function, PSF)를 이용한 방법이 사용된다. PSF는 점 광원이 퍼지는 것을 나타내는 함수이며 그중 가우시안(Gaussian) PSF는 다음의 식 (1)과 같다.
여기서, 𝜎는 빛이 퍼지는 정도를 의미하며, 0.61𝜆/NA로 결정되고, 𝜆는 빛의 파장, NA는 수치 조리개(Numerical Aperture)을 나타낸다. 본 논문에서는 𝜎를 nm로 설정하였고 ,이 때의 가우시안 PSF는 Fig. 2와 같다.
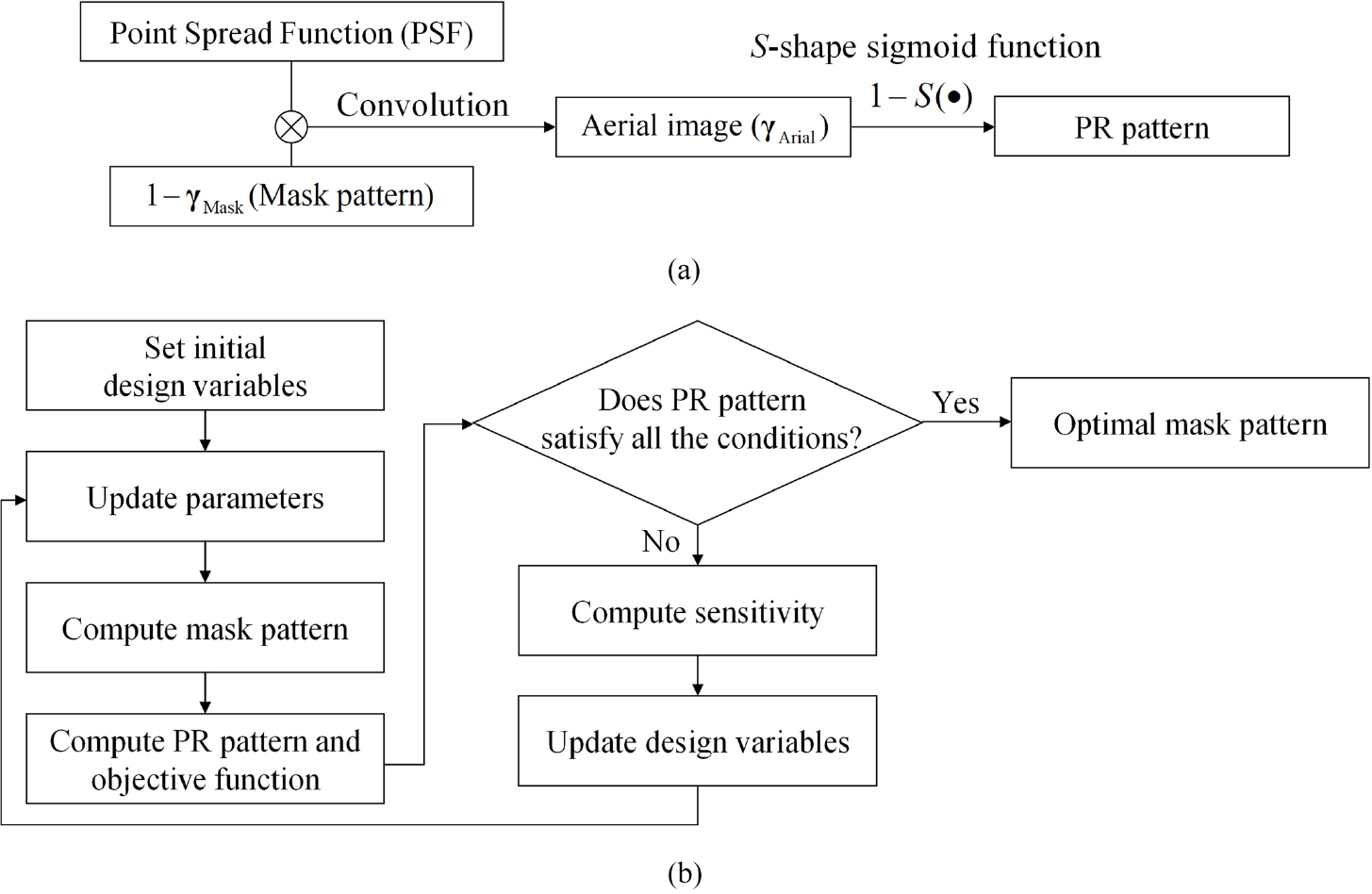
이 연구에서 점 확산 함수를 이용한 시뮬레이션의 전체적인 과정은 Fig. 3(a)와 같다. 먼저 마스크의 패턴은 다음의 식 (2)와 같이 0과 1 사이의 값을 갖는 위치에 대한 함수 로 표현된다.
여기서, 빛이 투과하지 못하는 위치에서 값이 1, 투과할 수 있는 부분에서 값은 0으로 설정된다.
그 다음 주어진 마스크 패턴으로부터 에어리얼 이미지를 계산한다. 에어리얼 이미지는 노광된 포토레지스트 위의 패턴으로, 빛이 회절하는 효과를 고려하여 포토레지스트 위에 가해지는 점 x 에서의 빛의 강도 를 의미하며 이는 다음과 같은 식 (3)으로 계산된다.
여기서, *은 컨볼루션(Convolution)을 의미하며, 본 논문에서는 PSF와 마스크 패턴을 1 nm×1 nm 크기의 요소들로 이산화하여 다음과 같은 식 (4)의 이산화된 컨볼루션을 통해 계산한다.
여기서, 이산화된 PSF, 마스크 패턴, 에어리얼 이미지는 각각 PSF, , 으로 나타내었고, ⊗로 이산화된 컨볼루션을 나타내었다. 이 때 에어리얼 이미지는 포토레지스트에 가해지는 빛의 세기를 0에서 1사이로 정규화한 값이다.
포토레지스트 패턴은 다음의 식 (5)와 같이 에어리얼 이미지에 S-모양 함수를 적용하여 얻을 수 있다.
여기서, 는 를 의미하며, 파라미터 와 를 조절하여 에어리얼 이미지에서 PR 패턴이 되는 기준을 변경할 수 있다. 이 기준은 포토레지스트의 물성치와 포토레지스트에 광원이 조사되는 시간 등에 따라 변경되며 이에 맞는 파라미터를 선정할 수 있다. 이렇게 구하여진 포토레지스트 패턴 과 원하는 목적 패턴의 차이를 최소화시키는 마스크 패턴 를 구하는 최적화한다.
2.2 최적설계 정식화
이 절에서는 최적설계를 위한 목적함수와 제약 조건, 설계변수를 설명한다. 본 논문에서는 목적 패턴과 포토레지스트 패턴의 차이를 나타내는 최적화 문제의 목적함수로 다음 식 (6)과 같은 두 가지 함수(제곱 합과 p-노름)을 이용한다.
여기서, 는 요소의 개수이며, 와 는 각각 포토레지스트 패턴과 목적 패턴의 번째 요소의 값을 의미하고, 는 2로 설정한다.
위상 최적설계 기법에서 나타나는 체커보드 문제를 막고, 마스크 패턴의 최소 길이 스케일(minimum length scale)을 조절하기 위해, 마스크 패턴 를 설계변수로 직접적으로 사용하지 않고 다음 식 (7)과 같이 𝛾 라는 설계 변수를 먼저 지정하고, 위상 최적화 기법에서 사용되는 밀도 필터링(density filtering)을 이용하여 마스크 패턴을 함수화한다.
여기서, 는 로 계산되며, 은 필터링 반경, 는 번째와 번째 요소 사이의 거리를 나타내고, 설계 변수 𝛾는 이다. 위의 필터는 거리-가중치 기반 밀도 필터와 S-모양 함수가 합성된 형태로 설계되는 형상의 최소 길이 스케일을 에 비례하게 하여 설정할 수 있다.
제약 조건은 사용되는 최적화 알고리듬의 특성에 따라 각각 식 (8a)의 0/1 제약 조건, 식 (8b)의 이진 변수의 변화를 제한시키는 제약 조건이 사용된다.
여기서, 𝜖은 충분히 작은 수이며, 𝛽는 이진 구조 위상 최적의 설계 변수 변화의 정도를 나타내며, 는 번째 요소의 설계변수 값이 0 이면 1 이고, 1 이면 -1, 그 외에는 0인 상수이다.
전체적인 최적화 과정은 Fig. 3(b)와 같다. 초기 설계변수는 타겟 패턴과 동일한 값으로 설정한다.
2.3 최적화 알고리듬
본 논문에서 비교된 최적화 알고리듬은 연속 변수를 이용한 기존 방법과 TOBS 그리고 TOBS 완화법이다. 기존의 민감도 기반 방법에서는 연속 변수에 대해 목적함수와 제약조건에 대한 민감도(sensitivity)를 계산하고, 연속 변수 기반 수치 최적화 알고리듬인 MMA를 이용하여 최적화를 진행한다(Svanberg, 1987). 기존 연속 변수 기반 최적설계에서는 설계변수가 0과 1 사이의 중간 값을 갖게 되는 것을 막기 위해 제약조건 식 (8a)가 필요하다. TOBS는 이진 구조설계를 위한 위상 최적설계 기법으로 설계변수가 0 과 1로만 설정되어 최적화되므로 식 (8a)의 제약조건이 필요하지 않지만, 설계변수가 과도하게 변화하는 것을 막기 위해 제약조건 식 (8b)가 사용된다. 기존 TOBS 기법에 관한 자세한 내용은 Sivapuram과 Picelli(2018)에서 찾을 수 있다. 완화된 TOBS은 기존 방법에서 설계변수가 0과 1로만 바뀌는 경우 비선형성이 높은 목적함수를 적절히 최적화할 수 없다는 점을 개선하기 위해 제안된 방법이다. Fig. 4와 같이 설계변수들이 초기(1 step)에 다수의 이산변수를 가질 수 있도록 설정되고 최적화를 진행하면서 점차 개수를 줄여나가서 최종적(N step)으로 두 개의 이산 변수 값을 가지도록 한다. 이산변수의 개수를 줄일 때는 다음 식 (9)와 같이 기존 값의 근처의 값으로 반올림하여 개수를 줄인다.
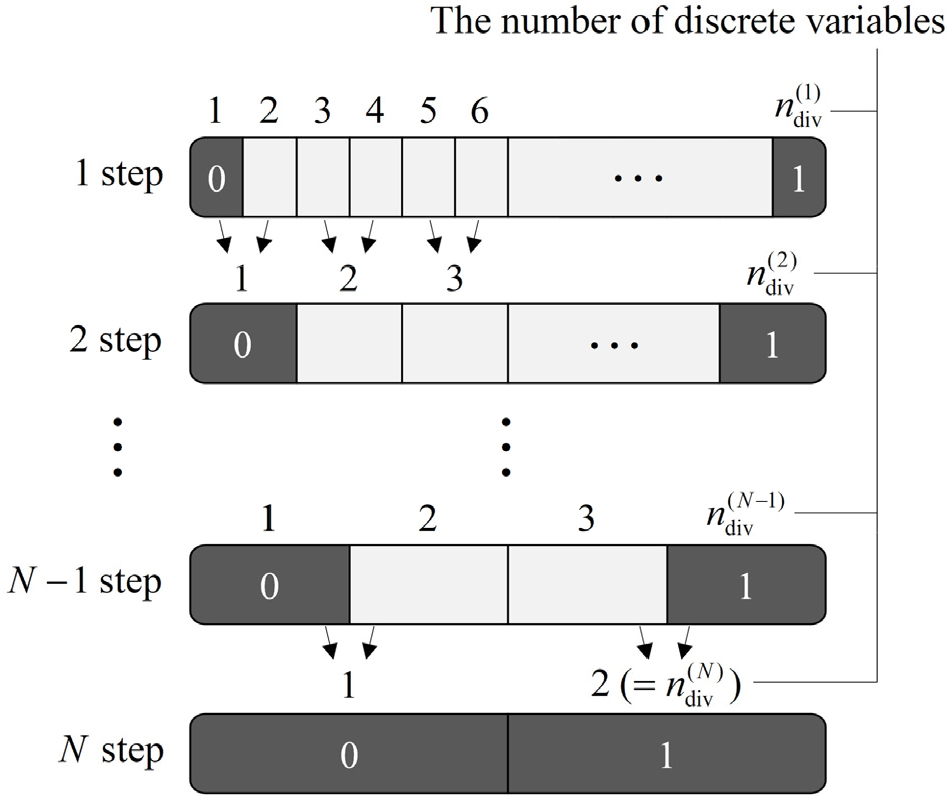
여기서, 와 는 각각 번째 단계에서 번째 요소의 설계변수 값과 이산변수 개수를 나타내고, 는 보다 같거나 작은 정수 중 최대 값을 의미한다.
완화된 TOBS를 사용하는 경우, 설계 변수의 변화량을 제어하여 비선형성이 큰 목적함수를 효과적으로 최적화할 수 있으나 줄여나갈 이산변수의 개수와 그 때의 최적화 반복 횟수를 시행착오법을 거쳐서 적절히 정해야 한다. 완화된 TOBS에서 제약 조건은 TOBS에서 사용하는 제약 조건 식 (8b)를 사용한다.
2.4 수치예제
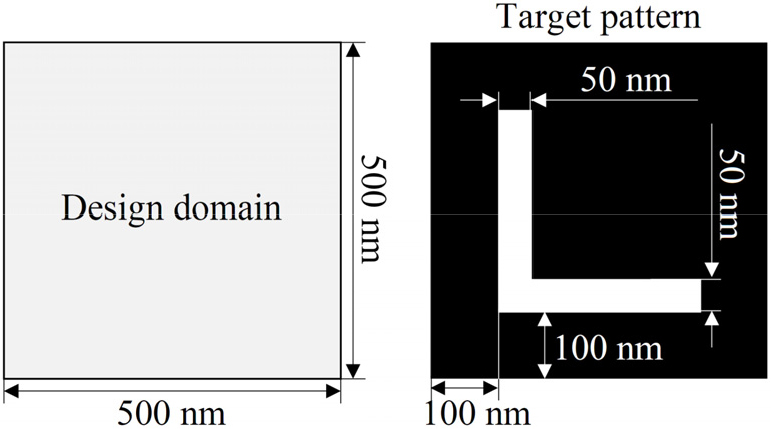
이 절에서는 광학 근접 보정에 위상 최적설계 기법을 적용하는 수치 예제를 설명한다. Fig. 5와 같은 간단한 L-모양의 패턴을 얻기 위한 최적화 문제를 푼다. 설계영역은 한변의 길이가 500nm인 정사각형 영역이며, 이 영역은 한 변의 길이가 1nm인 정사각형 모양의 요소들로 이산화되어 총 250,000개(500 × 500)의 요소로 분할된다.
최적화 과정에 쓰인 파라미터들은 다음과 같다. 에어리얼 이미지를 PR 패턴으로 변환하는 과정에 쓰이는 S-모양 함수의 값은 100, 값은 0.5로 설정된다. 밀도 필터에서 쓰이는 S-모양 함수의 와 는 각각 75와 0.5로 설정되었고, 은 2.5 nm로 설정되었다. 제약 조건에서의 파라미터들은 다음과 같다. 식 (8a)의 𝜖값은 반복 횟수에 따라 점차 변경되도록 설정되는데, 반복 횟수 [1, 50, 150]에서 각각 10-4 × [100, 10, 5]로 설정된다. 식 (8b)의 𝛽값은 반복 횟수 [1, 101, 151]에서 각각 10-4 × [[100, 50, 2]로 설정된다. 이러한 값들은 시행착오법을 거쳐서 선정된다. 완화된 TOBS에서 이산 변수의 개수는 반복 횟수 [1, 101, 151, 181, 201]에서 각각 [32, 16, 8, 4, 2]로 설정되었다. 여기서 이산 변수 개수가 많을 때 반복횟수 구간이 더 넓게 지정된 것은 초반에 이산 변수의 개수가 많게 되면 최적화 반복 횟수가 더 많이 필요하게 되기 때문이다.
세 가지 최적화 알고리듬을 이용하여 목적함수 와 를 최적화한 결과는 Fig. 6과 같다. 목적함수 의 값은 연속 변수 기반 최적화, TOBS, 완화된 TOBS를 사용했을 때 각각 145.1, 258.8, 204.1을 얻었고, 의 값은 각각 12.06, 16.29, 14.09를 얻었다. 각각 경우에서 목적함수의 이력 곡선은 Fig. 7과 같다.
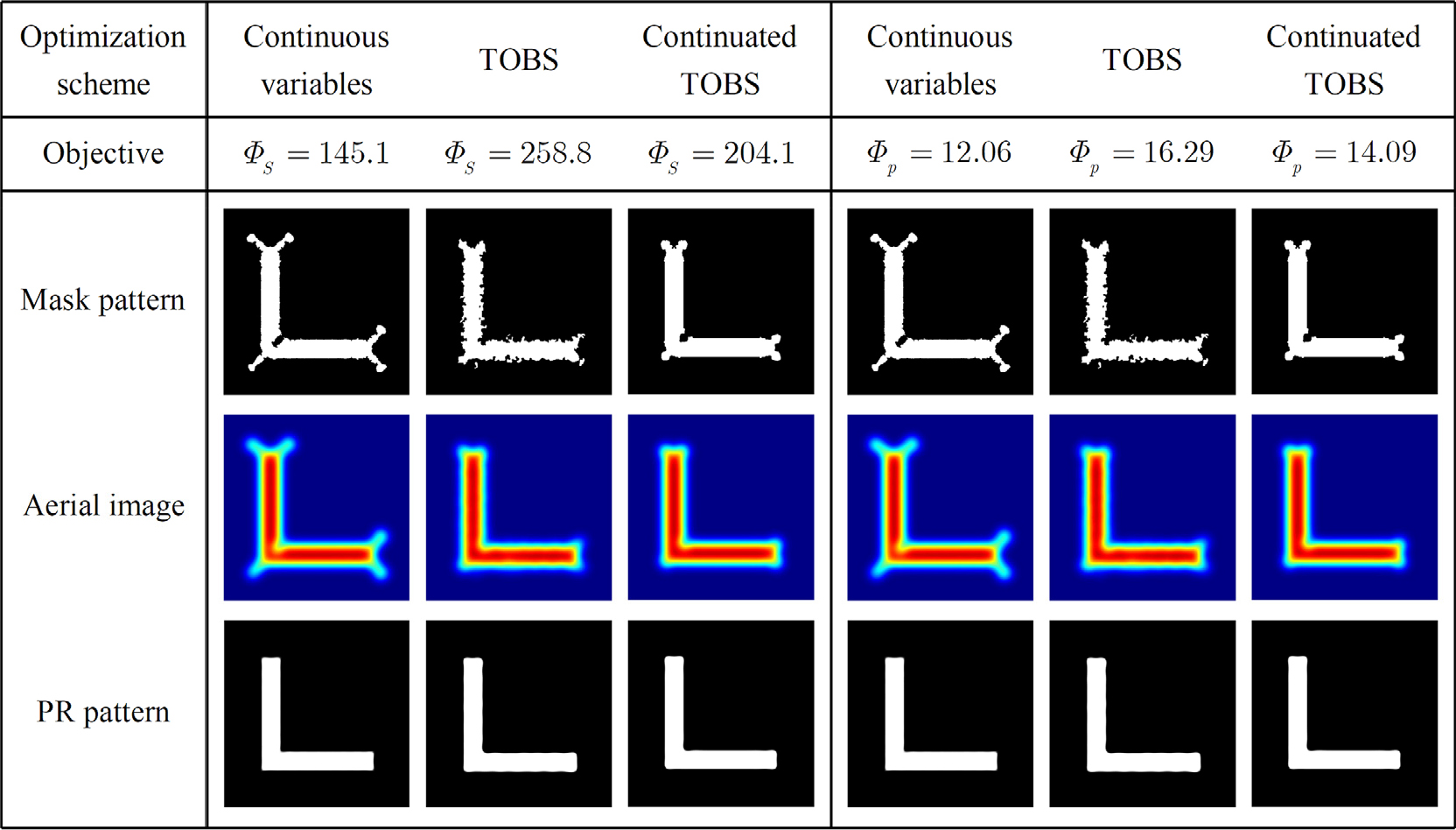
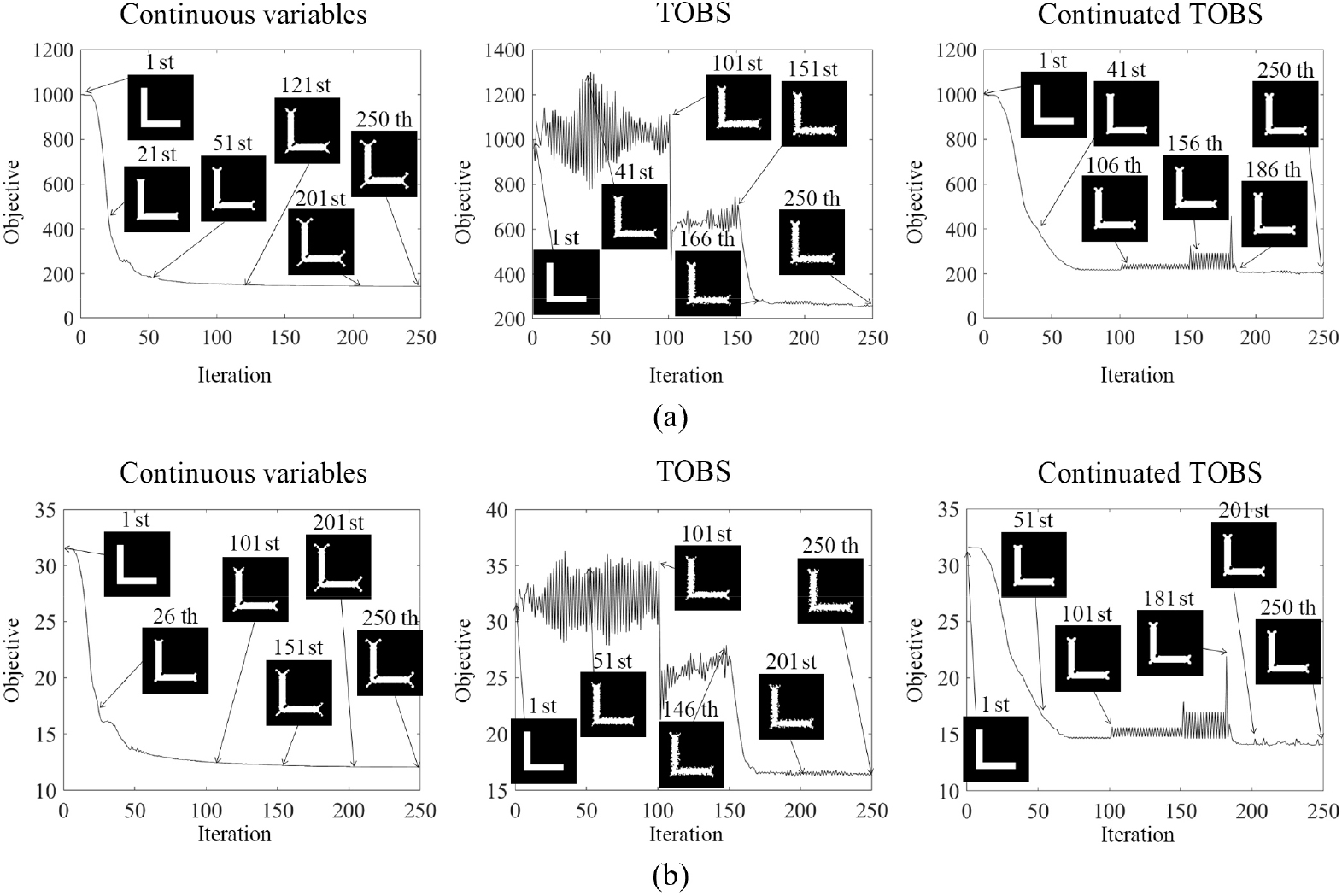
목적함수 값이 낮을수록 원하는 패턴에 가깝다는 것을 의미한다. 이 문제에서는 연속 변수 기반 방법을 사용한 경우 가장 좋은 목적함수를 얻는다는 것을 확인하였고, TOBS를 사용하는 경우에는 목적함수의 큰 비선형성으로 인해 최적화 과정에서 목적함수 값의 많은 진동이 발생되는 것을 확인할 수 있었다(Fig. 7). 이와 달리 완화된 TOBS에서는 초반의 진동을 완화시켜 기존 방법의 TOBS보다 낮은 값의 목적함수를 갖는 결과를 얻을 수 있었다. Fig. 7에서 보여지는 것과 같이 완화된 TOBS에서도 약 70번째 횟수의 반복과정을 거치면 목적함수 값의 진동이 나타나는 것을 확인할 수 있었지만, 이러한 비선형성이 큰 목적함수를 최적화하는 경우, 완화된 TOBS 방법을 사용하여 기존 TOBS의 문제를 일부 해결할 수 있다는 가능성을 확인하였다. 광학 근접 보정을 위해 세 가지 위상 최적설계 기법을 비교한 결과 연속 변수 기반 방법을 사용한 경우 추가적인 0/1 제약 조건이 필요하지만 가장 낮은 목적함수 값을 갖는 결과를 얻었고, 기존 TOBS 기법보다는 완화된 TOBS 기법이 더 나은 결과를 줄 수 있다는 것을 확인할 수 있었다.
3. 결 론
본 연구에서는 광학 근접 보정 해석에서 완화된 이진 구조 최적설계를 고안하고, 연속 변수 기반 위상 최적설계, 이진 구조 최적설계, 완화된 이진 구조 최적설계 방법을 OPC 마스크 설계에 적용 및 비교하였다. 광학 근법 보정 기술을 위한 시뮬레이션으로는 점 확산 함수가 사용되었고, 이를 통해 빛의 회절을 고려하였다. 마스크 설계를 위한 시뮬레이션에서는 밀도가 1과 0 일때를 각각 막혀 있고 뚫려 있는 경우로 모사한다. 포토레지스트 위에 가해지는 빛의 강도를 이미지화한 에어리얼 이미지에 S-모양 함수를 적용하여, 현상된 포토레지스트 패턴을 얻게 된다. 본 논문에서는 제곱 합과 p-노름 기반 목적 함수를 이용하여 원하는 패턴과 해석된 포토레지스트 패턴의 차이를 최소화한다. 기존의 연속 변수 기반 알고리듬을 사용한 최적화에서는 해를 0과 1로 얻기 위해 추가적인 제약조건을 필요로 하며, 이진 구조 최적설계 기법을 사용한 최적화에서는 비선형성이 높은 목적 함수의 최적 해를 효과적으로 탐색하기 어려운 한계가 있다. 따라서 본 연구에서는 이러한 문제들을 해결하기 위해 완화된 이진 구조 최적설계를 제안하였다. 이 방법에서는 초기 설계 변수를 다수의 이산 변수들로 설정하고 최적화 과정이 반복될수록 설정된 이산변수 개수가 점차 줄어들어 모든 설계변수 값이 0 또는 1에 도달한다.
이후 완화된 이진 구조 최적화 알고리듬과 연속 변수 기반 최적화, 이진 구조 최적화를 사용한 광학 근접 보정의 성능을 비교하였다. 최적설계한 결과 연속 변수 기반 최적설계, 완화된 이진 구조 최적설계, 이진 구조 최적설계 순으로 목적함수 값이 작았다. 이진 구조 최적설계의 경우 목적함수의 큰 비선형성으로 인해 최적화 과정에서 많은 진동이 발생하였고, 완화된 이진 구조 최적설계의 경우 진동의 폭이 완화되었다. 완화된 이진 구조 최적설계에서 초기 이산변수 개수를 늘려 국소 최적화 값에 더 쉽게 빠져나와 더 낮은 목적함수를 얻는 것을 확인하였으며, 추후 완화된 이진 구조 최적설계가 더 발전된 가능성이 있음을 확인하였다.
